Изобретение относится к сельскохозяйственному машиностроению и предназначено для опрыскивания сельскохозяйственных культур с целью одновременной обработки растений для защиты от вредителей и болезней и внесения жидких удобрений.
Известен беспилотный робот для внесения гербицидов, содержащий раму с управляемыми колесами, систему управления и навигации с контрольно-измерительными приборами, систему питания, боковой модуль для дифференцированного внесения гербицидов. (Патент на изобретение RU 2645165 С2, МПК B25J 1/00, B25J 5/00, А01М 7/00, A01G 25/09, А01С 23/00, опубликовано 16.02.2018).
Известен беспилотный робот для опрыскивания сельскохозяйственных культур, содержащий полурамы с колесами, каждое из которых снабжено электродвигателем, систему управления робота, систему питания и модуль для дифференцированного внесения агрохимических средств. (Патент на изобретение RU 2645165 С2, МПК B25J 1/00, B25J 5/00, А01М 7/00, A01G 25/09, А01С 23/00. Опубликовано 16.02.2018).
Недостатком известных устройств является то, что они имеют низкую производительность, ввиду малой ширины захвата при обработке сельскохозяйственных культур, а также отсутствии возможности одновременной обработки сорной растительности и полезной культуры разными растворами.
Технической задачей изобретения является повышение производительности за счет изменения ширины захвата и одновременного выполнения агротехнических задач обработки сорной растительности и полезной культуры разными растворами.
Технический результат достигается тем, что в автономном полевом роботе дифференцированного внесения агрохимических стредств методом опрыскивания, содержащем две полурамы с колесами, каждое из которых снабжено электродвигателем, систему управления робота, систему питания и модуль для дифференцированного внесения агрохимических средств, согласно изобретению, модули выполнены с возможностью последовательного их соединения и на каждом из них установлено не менее одного рабочего органа с емкостью для агрохимических средств, каждый рабочий орган снабжен независимой системой управления и позиционирования для одновременной обработки сорной растительности и полезной культуры различными агрохимическими растворами.
Изменяемая конструкция робота имеет адаптируемую ширину захвата при обработке полезных культур и высоту рабочего органа до обрабатываемого растения, что позволяет использовать его на различных полях, с отличающимися междурядьем, отступом в ряде и другими особенностями агропроизводства. Модульность конструкции также позволяет увеличивать или уменьшать рабочую область робота в зависимости от требований к конкретной агротехнической задаче.
Изобретение поясняется чертежами.
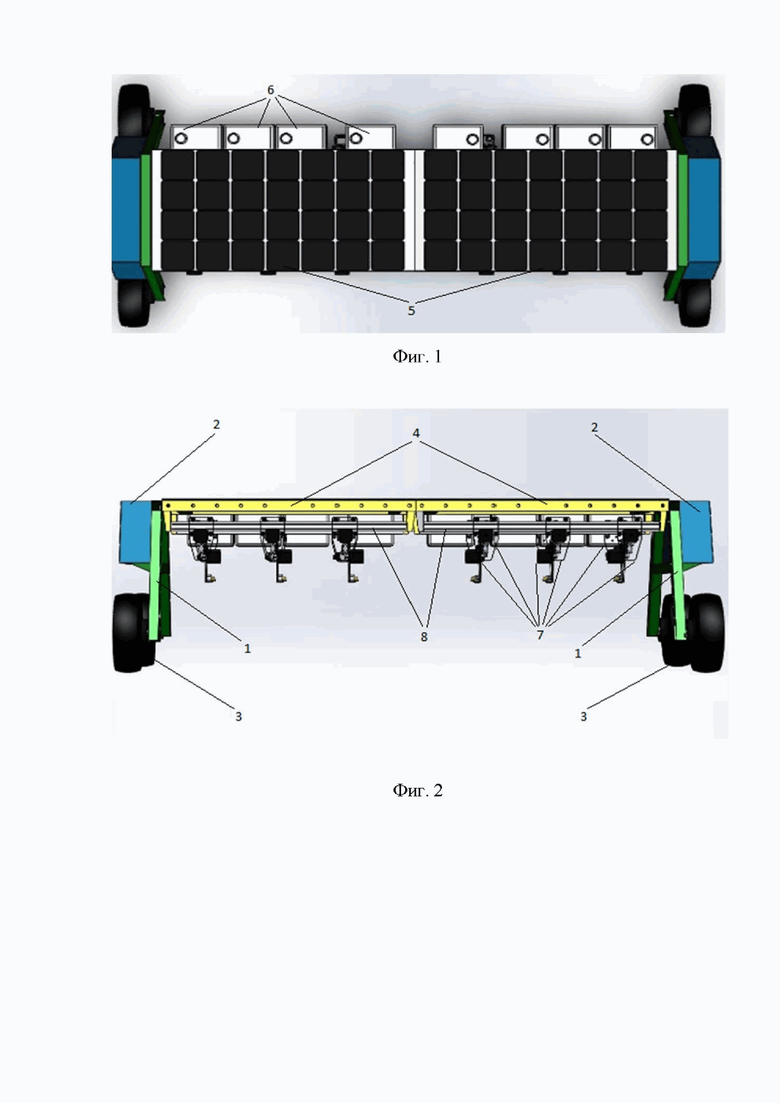
На фиг.1 представлена схема автономного полевого робота, вид сбоку; на фиг.2 - то же, вид спереди.
Автономный полевой робот дифференцированного внесения агрохимических стредств методом опрыскивания состоит из двух полурам 1, выполненных с возможностью регулирования высоты просвета и ширины междурядья. На каждой полураме 1 установлен защитный короб 2, в котором размещены по два электродвигателя, аккумулятор и система управления (на фиг. не показаны). Система управления отвечает за позиционирование робота в поле. Полурамы 1 установлены на колесах 3, приводимых в движение электродвигателями. К полурамам 1 крепятся базовые модули 4, каждый из которых может быть оснащен солнечной панелью 5, емкостью 6 с агротехнической жидкостью для каждого рабочего органа 7 с независимыми системами позиционирования 8 и управления рабочими органами 7 (на фиг. не показано). Аккумуляторы и солнечные панели 5 объединены в систему питания. Солнечные панели обеспечивают робот дополнительным запасом электроэнергии.
Количество базовых моделей 4 и рабочих органов 7, установленных на них зависит от агротехнических требований к конкретной культуре и может варьироваться. Конструкция предусматривает возможность установки независимых рабочих органов 7 для внесения различных агрохимических жидкостей одновременно для разных типов растений. Базовые модули 4 соединены последовательно, что кратно увеличивает производительность робота за счет увеличения ширины захвата. Модули 4 могут крепиться на полураме 1 и между собой с помощью унифицированных соединительных элементов (на фиг. не показаны), например, профилями с болтовыми соединениями.
Автономный полевой робот дифференцированного внесения агрохимических средств методом опрыскивания работает следующим образом.
Перед работой необходимо наполнить баки агрохимическими средствами, зарядить аккумуляторы, настроить ширину захвата и высоту рабочего органа, включить роботизированное устройство, загрузить карту задания. Карта задания строится с помощью беспилотного летательного аппарата и передается на автоматизированный пункт управления.
Система управления роботом рассчитывает траекторию его движения, определяет его местоположение на карте задания. Система управления рабочим органом 7 получает данные, обрабатывает их и позиционирует рабочий орган 7 в режиме реального времени. Система позиционирования рабочего органа 7 получает координаты растения, которое требуется обработать.
После вычисления позиции растения, система управления передает команду рабочему органу 7 с учетом поправки координат для движущегося робота, после чего включается система опрыскивания растений.
Использование робота обеспечивает повышение производительности и возможность одновременного выполнения различных агротехнических задач опрыскивания для широкого спектра сельскохозяйственных культур.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
| Машина для дифференцированного внесения пестицидов, жидких минеральных удобрений и других агрохимикатов | 2020 |
|
RU2748996C1 |
| Роботизированный гусеничный опрыскиватель для обработки сельскохозяйственных культур | 2019 |
|
RU2701663C1 |
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| Мобильный робот для контактного нанесения пестицидов | 2023 |
|
RU2797047C1 |
| Комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии | 2016 |
|
RU2617163C1 |
| Беспилотный робот для внесения гербицидов | 2016 |
|
RU2645165C2 |
| Штанга опрыскивателя | 2023 |
|
RU2810004C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| Устройство для дифференцированного внесения органических удобрений при возделывании пропашных культур | 2021 |
|
RU2770193C1 |
Изобретение относится к области сельскохозяйственного машиностроения. Устройство содержит две полурамы (1) с колесами (3), каждая из которых снабжена электродвигателем, системой управления робота, системой питания и модулями (4) для дифференцированного внесения агрохимических средств. Полурамы (1) выполнены с возможностью регулирования высоты просвета и ширины междурядья, модули - с возможностью последовательного их соединения. На каждом из модулей (4) установлено не менее одного рабочего органа (7) с емкостью для агрохимических средств. Каждый рабочий орган (7) снабжен независимыми системами управления и позиционирования (8) для одновременной обработки сорной растительности и полезной культуры агрохимическими растворами. Обеспечивается повышение производительности. 1 з.п. ф-лы, 2 ил.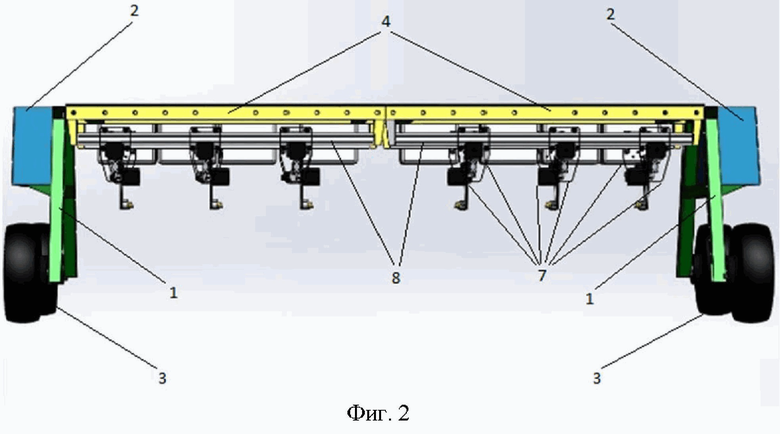
1. Автономный полевой робот дифференцированного внесения агрохимических средств методом опрыскивания, содержащий две полурамы с колесами, каждая из которых снабжена электродвигателем, системой управления робота, системой питания и модулями для дифференцированного внесения агрохимических средств, отличающийся тем, что полурамы выполнены с возможностью регулирования высоты просвета и ширины междурядья, модули - с возможностью последовательного их соединения, на каждом из них установлено не менее одного рабочего органа с емкостью для агрохимических средств, каждый рабочий орган снабжен независимыми системами управления и позиционирования для одновременной обработки сорной растительности и полезной культуры агрохимическими растворами.
2. Автономный полевой робот по п. 1, отличающийся тем, что каждый модуль снабжен солнечной панелью.
| CN 207305623 U, 04.05.2018 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Автономный роботизированный комплекс для точечной борьбы с сорной растительностью | 2021 |
|
RU2767537C1 |
| Беспилотный робот для внесения гербицидов | 2016 |
|
RU2645165C2 |

