Изобретение относится к робототехнике, а именно к адаптивным мобильным пространственным манипуляционным робототехническим системам, и может быть использовано для эксплуатации в межтрубном пространстве, а также для перемещения вдоль колонн с ограниченным наружным пространством.
Известен адаптивный мобильный пространственный робот-манипулятор, содержащий пространственную структуру в виде октаэдрного модуля в исходном положении, ребра которого выполнены в виде стержней, концы которых шарнирно соединены в вершинах октаэдрного модуля. При этом стержни снабжены линейными приводами с датчиками относительного перемещения, причем стержни выполнены с возможностью изменения их длины по управляющим командам на линейные приводы от системы управления. Все грани октаэдрного модуля выполнены с возможностью соединения через них с подобными модулями и все стержни снабжены шарнирными соединениями на концах, выполненных в виде сферических шарниров. Вершины октаэдрного модуля и срединные участки стержней тыльной грани, расположенной с противоположной стороны от направления движения и параллельной ей фронтальной грани, расположенной со стороны направления движения, снабжены радиальными упорами с датчиками температуры и электрическими контактами с возможностью образования адаптивных схватов и фиксирующих опор робота-манипулятора. (С.Н. Саяпин, А.В. Синев. Адаптивный мобильный пространственный робот-манипулятор и способ организации движений и контроля физико-механических свойств и геометрической формы контактируемой поверхности и траектории перемещения с его помощью // Патент на изобретение РФ №2424893, МПК B25J 5/00, B25J 13/08, заявлено 11.01.2009; опубл. 27.07.2011, Бюл. №21. - прототип).
Недостатками устройства являются:
• Минимальный размер межтрубного расстояния определяется разностью между радиусами вписанной и описанной окружностями граней октаэдрного модуля при минимальной длине их линейных приводов. В результате фиксация октаэдрного модуля к наружной поверхности внутренней трубы осуществляется через срединные участки линейных приводов фронтальной и тыльной граней, а фиксация октаэдрного модуля к внутренней поверхности наружной трубы - через вершины фронтальной и тыльной граней. В результате образуется паразитное пространство, препятствующее максимальному уменьшению минимального межтрубного расстояния.
• Исходя из геометрии октаэдрного модуля минимальная длина линейных приводов его граней соответствует длине правильного треугольника с вписанной окружностью, радиус которой равен сумме радиуса наружной поверхности внутренней трубы и радиуса поперечного сечения линейного привода. В результате минимальная длина линейного привода оказывается избыточной для фиксации фронтальной и тыльной граней, что ведет к увеличению габаритно-массовых характеристик устройства.
Техническим результатом предлагаемого адаптивного мобильного пространственного робота-манипулятора для перемещения в межтрубном пространстве является уменьшение габаритно-массовых характеристик и расширение функциональных возможностей за счет организации уменьшения минимального межтрубного расстояния, а также увеличения максимально допустимого диаметра протяженных предметов, например труб и кабелей, перемещаемых внутри трубы.
Это достигается тем, что в адаптивном мобильном пространственном роботе-манипуляторе, содержащем активную пространственную двенадцатистержневую параллельную структуру, установленную в межтрубном пространстве, концы стержней которой с помощью сферических шарниров соединены с вершинами по четыре в каждой, совпадающие в исходном положении с вершинами октаэдра, при этом каждый из стержней снабжен приводом, датчиками силы, относительного перемещения и относительной скорости, а каждая из вершин - трехосным блоком гироскопов-акселерометров, которые электрически соединены с системой управления, в исходном положении стержни активной пространственной двенадцатистержневой параллельной структуры образуют каркас кругового прямого цилиндра с фронтальным и тыльным основаниями радиуса r и выполнены в виде дугообразных приводов криволинейного перемещения с одинаковыми длинами хорд h, равными расстояниям между смежными вершинами, при этом каждое из оснований цилиндра радиуса r образовано тремя дугообразными приводами криволинейного перемещения, шарнирно соединенными в вершинах соответственно фронтального и тыльного оснований цилиндра, а дуги смежных пар боковых дугообразных приводов криволинейного перемещения выполнены в виде участков гелисы правого и левого хода с радиусом r и шагом S, равным 4,5h, длина которых ограничена величиной S/6. Причем каждый из дугообразных приводов криволинейного перемещения может быть выполнен с двусторонними штоками.
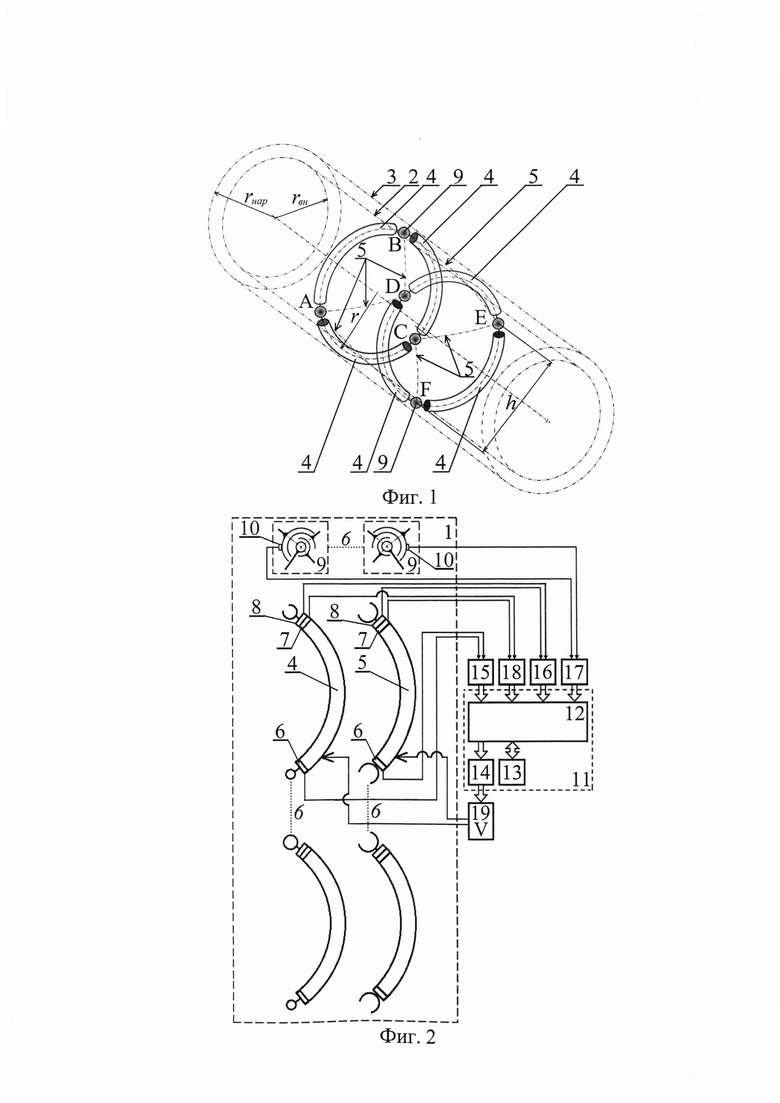
На фиг. 1 представлено схематическое изображение активной пространственной двенадцатистержневой параллельной структуры (АПДПС) с вершинами А, В, С, D, Е и F адаптивного мобильного пространственного робота-манипулятора (АМПРМ), расположенного в межтрубном пространстве.
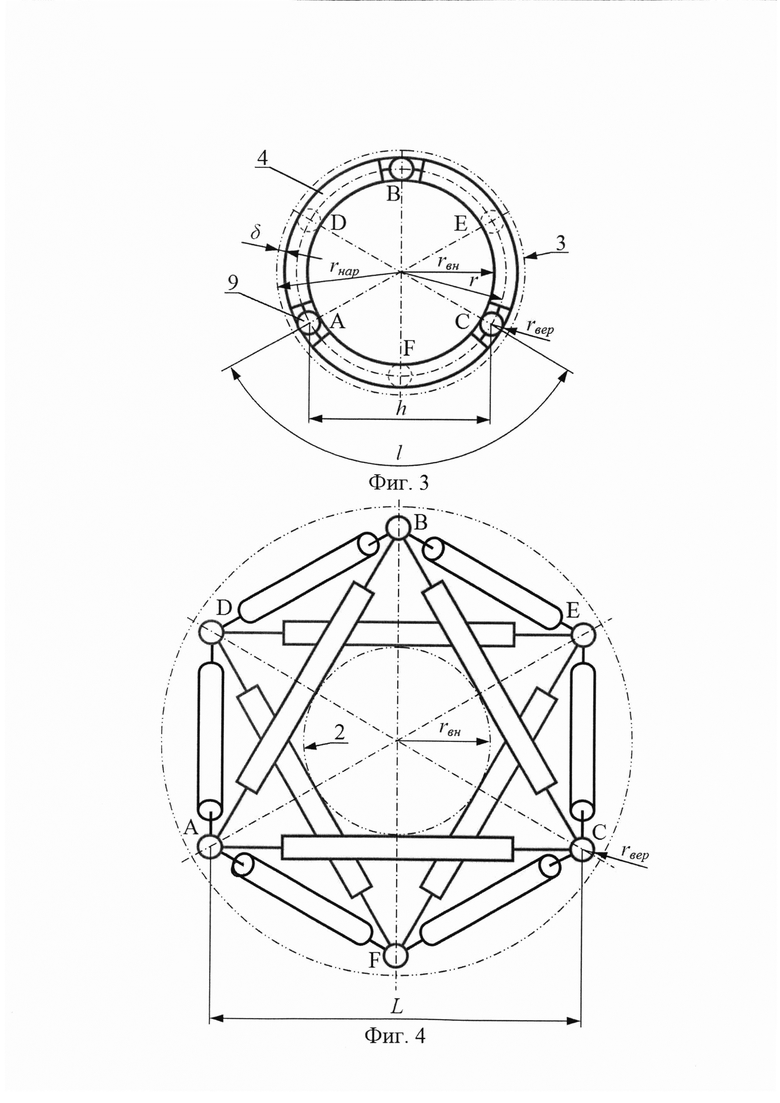
На фиг. 2 представлена структурная схема АМПРМ.
На фиг. 3 показан фронтальный вид на АПДПС с вершинами А, В, С, D, Е и F, расположенный в межтрубном пространстве с фиксацией на наружной поверхности внутренней трубы.
На фиг. 4 показан фронтальный вид на октаэдральный модуль с вершинами А, В, С, D, Е и F (прототип), расположенный в межтрубном пространстве с фиксацией на наружной поверхности внутренней трубы.
АМПРМ выполнен в виде АПДПС 1, установленного в межтрубном пространстве, образованном наружной поверхностью 2 внутренней трубы радиуса rвн и внутренней поверхностью 3 наружной трубы радиусом rнар. В исходном положении АПДПС 1 представляет собой каркас кругового прямого цилиндра с фронтальным и тыльным основаниями радиуса r, образованный из 12 дугообразных приводов криволинейного перемещения (ДПКП) с одинаковыми длинами хорд h, равными расстояниям между смежными вершинами. При этом фронтальное и тыльное основания каркаса цилиндра образованы ДПКП 4 по три в каждом с дугами окружностей радиуса r, а боковая поверхность - шестью ДПКП 5, дуги которых выполнены в виде гелис правого и левого хода с радиусом r и шагом S, равным 4,5h, длина которых ограничена величиной S/6. Причем в силу симметрии ДПКП 5 с гелисами правого и левого хода взаимозаменяемы. Каждый из ДПКП 4 и 5 снабжен осевыми датчиками силы (ДС) 6, относительного перемещения (ДОП) 7 и относительной скорости (ДОС) 8. Концы ДПКП 4 фронтального (расположенного со стороны направления движения) и тыльного оснований каркаса цилиндра и ДПКП 5 боковой поверхности каркаса цилиндра с помощью сферических или эквивалентных им шарниров соединены с вершинами 9 по четыре в каждой. При этом вершины 9 являются вершинами октаэдра ABCDEF с длиной ребра равной длине хорды h ДПКП 4 и 5. Здесь вершины ABC лежат на фронтальном, а вершины DEF - на тыльном основании каркаса цилиндра. АПДПС 1 представляет собой пространственный механизм параллельной структуры, выполненный с возможностью образования пространственной фермы при отключенных исполнительных органах в виде ДПКП 4 и 5. В каждой из вершин 9, представляющей собой шарнирный узел, установлен совмещенный датчик пространственного положения и ускорений (СДППУ) 10, выполненный в виде трехосного блока гироскопов-акселерометров, позволяющих определять относительные положения вершин 9 и измерять составляющие ускорений, действующих на ДПКП 4 и 5. Система управления (СУ) 11 включает нейрокомпьютер 12, программно-алгоритмическое обеспечение 13 и цифро-аналоговые преобразователи (ЦАП) 14. Входы СУ 11 через шины данных аналого-цифровых преобразователей (АЦП) подключены соответственно к выходам АЦП 15 ДС 6, АЦП 16 ДОП 7, АЦП 17 СДППУ 10, АЦП 18 ДОС 8, а выходы СУ 11 через шины выходных данных подключены к соответствующим входам программно-алгоритмического обеспечения (ПАО) 13 и последовательно соединенных цифро-аналоговых преобразователей (ЦАП) 14, усилителей мощности 19 и исполнительных органов в виде ДПКП 4 и 5. При этом СУ 11 и система энергопитания (на фиг. условно не показана) могут быть выполнены как автономного, так и дистанционного исполнения.
АМПРМ, выполненный в виде АПДПС 1, образующей цилиндрический каркас, работает следующим образом.
Вершины фронтального (А, В, С) и тыльного (D, Е, F) оснований каркаса цилиндра АПДПС 1 снабжены радиальными упорами (на фиг. условно не показаны), взаимодействующими с наружной поверхностью 2 внутренней трубы радиуса rвн и внутренней поверхностью 3 наружной трубы радиусом rнар и служат соответственно для передачи распорных и сжимающих усилий от вершин к контактируемым поверхностям. Оперативный контроль передаваемых усилий в местах контакта радиальных упоров вершин 9 с поверхностями 2 и 3 осуществляют с помощью ДС 6. В непосредственной близости от радиальных упоров вершин 9 установлены СДППУ 10, которые служат для оперативного контроля пространственного положения каждой из вершин 9 и виброускорений вдоль оси каждого из ДПКП 4 и 5. ДОП 7 и ДОС 8 (наблюдатели состояний) ДПКП 4 и 5 регистрируют их относительные перемещения и скорости.
АПДПС 1 устанавливают в межтрубном пространстве и осуществляют необходимые перемещения в зависимости от поставленных задач. При этом с помощью ДПКП 4 и 5 и СУ 11 осуществляют согласованные изменения длин хорд ДПКП 4 и 5 АПДПС 1. В результате происходят заданные пространственные перемещения вершин 9 относительно базовой системы координат. Управление исполнительными органами АПДПС 1 (ДПКП 4 и 5) осуществляется по управляющим командам от СУ 11, которые формируются по показаниям ДС 6, ДОП 7, ДОС 8 и СДППУ 10. При этом сигналы от датчиков поступают на входы АЦП 15, 16, 18 и 17 соответственно и через шину данных в нейрокомпьютер 12 СУ 11. После обработки в реальном масштабе времени данных с использованием соответствующего ПАО 13 формируют управляющие команды, которые через ЦАП 14 и усилители мощности 19 поступают на исполнительные органы (ДПКП 4 и 5) и АПДПС 1 изменяет свою геометрическую форму (трансформируется).
Перемещение АМПРМ в межтрубном пространстве организуется с помощью АПДПС 1 следующим образом. Управление перемещением АПДПС 1 осуществляется согласованным изменением длин хорд h ДПКП 4 и 5, обеспечивающих необходимое внутритрубное перемещение вершин 9. При этом по показаниям ДОП 7 ДПКП 4 и 5, выполненных, например, в виде позиционеров, осуществляют контроль длин хорд h всех ДПКП 4 и 5 АПДПС 1. По показаниям СДППУ 10, выполненных, например, в виде миниатюрных трехосных блоков гироскопов-акселерометров, судят о пространственных угловых перемещениях вершин 9. Геометрическая неизменяемость АПДПС 1 позволяет определять пространственные координаты вершин 9 по измеренным длинам всех хорд h и управлять их перемещениями аналогично организации пространственных перемещений  -координатного манипулятора (Колискор А.Ш. Разработка и исследование промышленных роботов на основе -координат // Станки и инструмент, 1982. №12. С.21-24). А показания СДППУ 10 позволяют повысить точность данных измерений с учетом погрешностей, вызванных тем, что в каждый из вершин 9 шарнирно соединяются концы четырех ДПКП 4 и 5 при помощи сферических или эквивалентных им шарниров, которые конструктивно не могут иметь общего центра вращения.
-координатного манипулятора (Колискор А.Ш. Разработка и исследование промышленных роботов на основе -координат // Станки и инструмент, 1982. №12. С.21-24). А показания СДППУ 10 позволяют повысить точность данных измерений с учетом погрешностей, вызванных тем, что в каждый из вершин 9 шарнирно соединяются концы четырех ДПКП 4 и 5 при помощи сферических или эквивалентных им шарниров, которые конструктивно не могут иметь общего центра вращения.
Продольное или винтовое перемещение АПДПС 1 в межтрубном пространстве по наружной поверхности внутренней трубы осуществляется попеременным перемещением относительно друг друга фронтального (А, В, С) и тыльного (D, Е, F) оснований каркаса цилиндра АПДПС 1, образованных ДПКП 4 и 5 соответственно. При этом предварительно ДПКП 4 и 5 включают на обратный ход и после уменьшения длин их хорд h до заданных величин, определяемых по показаниям ДОП 7 - отключают. Уменьшенную таким образом в поперечном сечении АПДПС 1 устанавливают в межтрубном пространстве. При этом фронтальное (А, В, С) и тыльное (D, Е, F) основания располагают перпендикулярно к направлению движения. Затем по команде от СУ 11 включаются ДПКП 4 тыльного основания (D, Е, F) на обратный ход и производят уменьшение длин их хорд h до момента установления контакта радиальных упоров (на фиг. условно не показаны) его вершин 9 с наружной поверхностью 2 внутренней трубы. После достижения заданного усилия, определяемого по показаниям ДС 6, происходит фиксация тыльного основания каркаса цилиндра на наружной поверхности 2 внутренней трубы и отключение ДПКП 4 тыльного основания и АПДПС 1 занимает исходное положение в межтрубном пространстве. После вычисления пространственных координат вершин 9 оснований относительно базовой системы координат по команде от СУ 11 включаются ДПКП 5 на прямой ход и увеличиваются длины их хорд до величины заданного шага перемещения, определяемой по показаниям их ДОП 7 и СДППУ 10, и ДПКП 5 выключают. Затем уменьшают длины хорд ДПКП 4 фронтального основания (А, В, С) до момента фиксации его вершин 9 на наружной поверхности внутренней трубы с заданным усилием, определяемым по показаниям ДС 6 и соответствующие ДПКП 4 отключают. Далее включают ДПКП 4 тыльного основания на прямой ход и увеличивают длины их хорд h до момента расфиксации вершин 9 тыльного основания с контактируемой поверхностью, который определяется по показаниям ДС 6, ДОП 7 и СДППУ 10. После этого по команде от СУ 11 производится остановка ДПКП 4 тыльного основания и начинается согласованное уменьшение длин хорд ДПКП 5 боковой поверхности каркаса цилиндра до хорд до величины заданного шага перемещения, определяемой по показаниям их ДОП 7 и СДППУ 10, и ДПКП 5 выключают. Затем по команде от СУ 11 производится уменьшение длин хорд тыльного основания (D, Е, F) до момента фиксации его вершин 9 на наружной поверхности внутренней трубы с заданным усилием, определяемым по показаниям ДС 6, и соответствующие ДПКП 4 отключают. Далее включают ДПКП 4 фронтального основания ((А, В, C)) на прямой ход и увеличивают длины их хорд h до момента расфиксации вершин 9 фронтального основания с контактируемой поверхностью, который определяется по показаниям ДС 6, ДОП 7 и СДППУ 10. После этого по команде от СУ 11 производится остановка ДПКП 4 тыльного основания и АПДПС 1 вновь занимает исходное положение в межтрубном пространстве. Далее алгоритм перемещения АПДПС 1 повторяют. Траектория перемещения вершин 9 оснований по наружной поверхности внутренней трубы может быть задана прямолинейной, винтовой или комбинированной, при этом запоминаются пространственные координаты вершин 9 оснований относительно базовой системы координат и время моментов их фиксации с контактируемой поверхностью и по их значениям судят о траектории движения и скорости перемещения АПДПС 1. Аналогичным образом АПДПС 1 может перемещаться в межтрубном пространстве по внутренней поверхности наружной трубы, а также комбинированно - по контактируемым поверхностям наружной и внутренней труб.
Перемещение в межтрубном пространстве может осуществляться независимо от пространственной ориентации труб, в коленах, а также в трубах с переменным поперечным сечением.
Геометрия АПДПС 1 (фиг. 3) по сравнению с октаэдрным модулем (прототипом) (фиг. 4) обеспечивает ему следующие преимущества.
1. При использовании внутренней трубы с радиусом rвн наружной поверхности 2 минимально допустимый радиус rнар внутренней поверхности 3 АПДПС (фиг. 3) существенно меньше, чем у октаэдрного модуля (фиг. 4), что расширяет функциональные возможности АПДПС. Так, например, в случае применения АПДПС минимальное значение rнар определяется по формуле:
rнар = rвн + 2rвер + δ,
где rвер и δ - радиус вершины 9 АПДПС и гарантированный зазор соответственно.
В случае же применения октаэдрного модуля минимальное значение rнар определяется по формуле:
rнар = rвн + rвн + rвер + δ = 2rвн + rвер + δ.
2. Минимальная длина ДПКП 4 определяется по формуле:
= (rвн + rвер)*π/3≈1,047(rвн + rвер).
Минимальная длина линейного привода октаэдрного модуля равна минимальному расстоянию между его смежными вершинами и определяется по формуле:
L = 2rвн*tg(π/3) = 3,464rвн, т.е. длина линейного привода эквивалентного октаэдрного модуля, а следовательно и масса, больше, чем в три раза.
Благодаря преимуществу 1, с помощью АПДПС, подобно применению октаэдрального модуля (прототипа), можно внутри трубы также перемещать протяженные охватываемые предметы, например трубы или кабели, но с большими поперечными размерами.
Также как и в случае применения октаэдрного модуля, с помощью АПДПС, благодаря его геометрической неизменяемости, можно осуществлять межтрубный контроль контактируемых поверхностей внутренней и наружной труб.
Аналогично, как и в случае применения октаэдрного модуля (прототипа), с помощью АПДПС можно организовать ударно-вибрационные воздействия долбежным инструментом на торцевую поверхность, например засора в межтрубном пространстве. В этом режиме долбежный инструмент устанавливают в каждой из вершин фронтального основания, а вершины тыльного основания фиксируют с контактируемой внутренней поверхностью наружной трубы или наружной поверхностью внутренней трубы. Затем согласованным изменением длин ДПКП 5 подводят рабочие части долбежных инструментов до контакта с торцевой поверхностью межтрубной пробки и начинают обработку с заданной частотой, амплитудой и усилием. При этом контроль вибрационных воздействий долбежного инструмента осуществляют с помощью СДППУ 10, установленных в вершинах фронтального основания, а также ДС 6, ДОП 7 и ДОС 8, установленных в ДПКП 5.
Приведенные адаптивный мобильный пространственный робот-манипулятор для перемещения в межтрубном пространстве может быть реализован на базе имеющихся на сегодняшний день разработок и функционирующих устройств. Так, известен «Адаптивный мобильный пространственный робот-манипулятор и способ организации движений и контроля физико-механических свойств и геометрической формы контактируемой поверхности и траектории перемещения с его помощью» (Патент на изобретение РФ №2424893, МПК B25J 5/00, B25J 13/08, заявлено 11.01.2009; опубл. 27.07.2011, Бюл. №21. - прототип), в описании которого представлены сведения об организации внутритрубного перемещения активного октаэдрного модуля параллельной структуры и организация с его помощью манипуляционных воздействий.
Сведения о возможности реализации совмещенных датчиков пространственного положения и ускорений, представляющих миниатюрные трехосные блоки гироскопов-акселерометров, выполненных, например, в виде микромеханических вибрационных гироскопов-акселерометров, представлены в описании патента РФ №2064682 «Микромеханический вибрационный гироскоп-акселерометр», МПК G01P 15/-97, заявлено 28.09.1993; опубл. 27.07.1996, Бюл. №21.
В дуговых приводах криволинейного перемещения ДПКП 4 и 5 могут быть использованы широко применяемые в машиностроении электромеханические, гидравлические и пневматические линейные приводы. Например, примеры исполнения подобных приводов представлены в патентах РФ №2270298 («Гидрофицированный привод поворота ковша одноковшовой машины», МПК E02F 3/43, заявлено 31.05.2004; опубл. 20.02.2006, Бюл. №5) и №2698226 («Винтовой гидроцилиндр», МПК F15B 15/12, заявлено 12.03.2015; опубл. 23.08.2015, Бюл. №24).
Использование данного изобретения позволит снизить габаритно-массовые характеристики устройства и расширить его функциональные возможности за счет организации уменьшения минимального межтрубного расстояния, а также увеличения максимально допустимого диаметра протяженных предметов, например труб и кабелей, перемещаемых внутри трубы.
Изобретение относится к робототехнике, а именно к адаптивным мобильным пространственным манипуляционным робототехническим системам, и может быть использовано для эксплуатации в межтрубном пространстве, а также для перемещения вдоль колонн с ограниченным наружным пространством. Адаптивный мобильный пространственный робот-манипулятор представляет собой активную пространственную двенадцатистержневую параллельную структуру, стержни которой образуют каркас кругового прямого цилиндра с фронтальным и тыльным основаниями радиуса r и выполнены в виде дугообразных приводов криволинейного перемещения с одинаковыми длинами хорд h, равными расстояниям между смежными вершинами. Каждое из оснований цилиндра радиуса r образовано тремя дугообразными приводами криволинейного перемещения, шарнирно соединенными в вершинах соответственно фронтального и тыльного оснований цилиндра, а дуги смежных пар боковых дугообразных приводов криволинейного перемещения выполнены в виде участков гелисы правого и левого хода с радиусом r и шагом S, равным 4,5h, длина которых ограничена величиной S/6. Обеспечивается снижение габаритно-массовых характеристик устройства и расширение его функциональных возможностей. 1 з.п. ф-лы, 4 ил.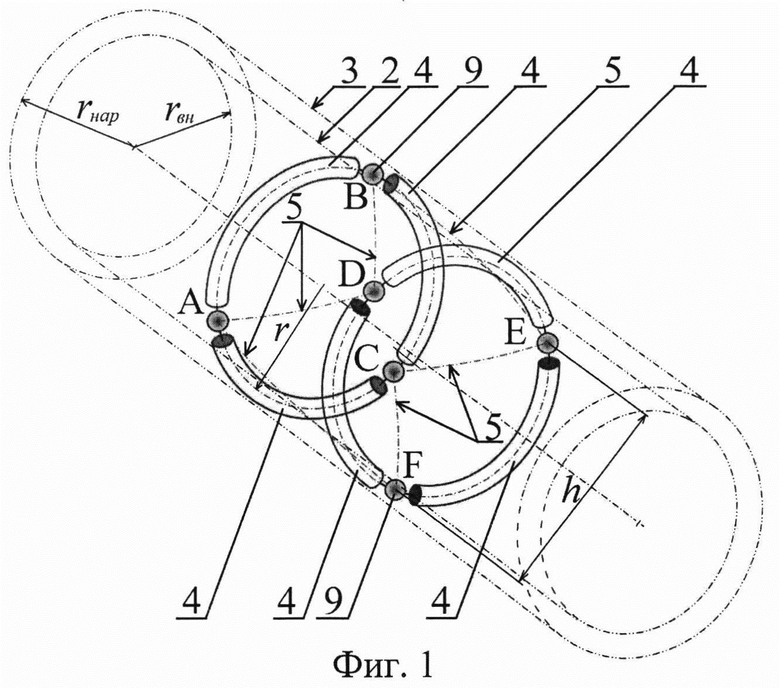
1. Адаптивный мобильный пространственный робот-манипулятор, содержащий активную пространственную двенадцатистержневую параллельную структуру, выполненную с возможностью установки в межтрубном пространстве, концы стержней которой с помощью сферических шарниров соединены с вершинами по четыре в каждой, совпадающие в исходном положении с вершинами октаэдра, при этом каждый из стержней снабжен приводом, датчиками силы, относительного перемещения и относительной скорости, а каждая из вершин - трехосным блоком гироскопов-акселерометров, которые электрически соединены с системой управления, отличающийся тем, что в исходном положении стержни активной пространственной двенадцатистержневой параллельной структуры образуют каркас кругового прямого цилиндра с фронтальным и тыльным основаниями радиуса r и выполнены в виде дугообразных приводов криволинейного перемещения с одинаковыми длинами хорд h, равными расстояниям между смежными вершинами, при этом каждое из оснований цилиндра радиуса r образовано тремя дугообразными приводами криволинейного перемещения, шарнирно соединенными в вершинах соответственно фронтального и тыльного оснований цилиндра, а дуги смежных пар боковых дугообразных приводов криволинейного перемещения выполнены в виде участков гелисы правого и левого хода с радиусом r и шагом S, равным 4,5h, длина которых ограничена величиной S/6.
2. Адаптивный мобильный пространственный робот-манипулятор по п. 1, отличающийся тем, что каждый из дугообразных приводов криволинейного перемещения выполнен с двусторонними штоками.
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР И СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЙ И КОНТРОЛЯ ФИЗИКО-МЕХАНИЧЕСКИХ СВОЙСТВ И ГЕОМЕТРИЧЕСКОЙ ФОРМЫ КОНТАКТИРУЕМОЙ ПОВЕРХНОСТИ И ТРАЕКТОРИИ ПЕРЕМЕЩЕНИЯ С ЕГО ПОМОЩЬЮ | 2009 |
|
RU2424893C2 |
| ТРУБОПРОВОДНЫЙ ДИАГНОСТИЧЕСКИЙ РОБОТ | 2018 |
|
RU2707644C1 |
| Передвижной конвейер | 1962 |
|
SU151608A1 |
| ВЫПУСКНОЙ КЛАПАН ПОРШНЕВОГО ДЕТАНДЕРА | 0 |
|
SU194854A1 |
| US 3539915 A1, 10.11.1970 | |||
| US 4862808 A1, 05.09.1989. | |||

