Изобретение относится к робототехнике, а именно к адаптивным мобильным плоским робототехническим модулям, способным функционировать как автономно, так и коллективно в составе роевых робототехнических систем (swarm systems), включая реконфигурируемые модульные роботы, и может быть использовано для индивидуальной и коллективной эксплуатации в наземной, подземной, подводной, авиационно-космической технике и инженерных сооружениях.
Известен универсальный трансформирующийся модульный робот, состоящий из унифицированных модулей, выполненных в виде однотипных телескопических трубок с механизмами изменения их длины, плоских или объемных элементов (например, в форме тетраэдра) постоянной длины или их комбинаций. Модули на концах или в вершинах снабжены разъемными сцепными устройствами, обеспечивающими возможность перестройки структуры трансформирующегося модульного робота непосредственно в процессе работы путем их соединения и разъединения. Трансформирующийся модульный робот снабжен также кабиной оператора с управляющим компьютером и электрическим генератором. Внутри модулей или в предусмотренных для их соединения отдельных блоках смонтированы двигательные устройства (А.В. Кожевников. Универсальный трансформирующийся модульный робот // Патент на изобретение РФ №2166427, МПК B25J 9/08, заявл. 15.12.1998; опубл. 10.05.2001, Бюл. №13. - прототип).
Недостатками устройства являются:
• Отсутствует индивидуальная мобильность модулей, т.е. возможность их самоперемещения по поверхности, что снижает функциональные возможности устройства в целом.
• Возможно только групповое самоперемещение роботов, вследствие чего в нерабочем положении все модули, входящие в группу должны быть соединены между собой хотя бы одним сцепным устройством. При этом к одному из свободных сцепных устройств должна быть подключена кабина оператора с управляющим компьютером и электрическим генератором. Таким образом, для объединения нескольких подобных групп из модулей требуется сначала организовать мобильность группы, подключенной к кабине оператора с управляющим компьютером и электрическим генератором, путем перераспределения модулей внутри данной группы до момента принятия заданной формы и структуры. Для этого требуется дополнительное время. Затем приблизиться и организовать электромеханический контакт со следующей группой и осуществить реконфигурацию новой структуры и т.д., пока не будут объединены все группы в единую активную структуру, что также требует дополнительного времени. В случае выхода из строя каких-либо модулей группы вся группа может оказаться неработоспособной.
• Огромное количество сцепных устройств модулей снижает надежность работы системы в целом.
• Отсутствует возможность организации самоперемещения группы из трех модулей в виде телескопических трубок с механизмами изменения их длины, объединенных, например, в активный треугольник, т.к. в этом случае их движения будут возвратно-поступательными без продвижения группы по поверхности.
• Т.к. модуль в виде телескопических трубок с механизмом изменения его длины содержит по крайней мере 7 приводов, то для активизации каждой из треугольных ячеек в составе универсального трансформирующегося модульного робота потребуется одновременная и согласованная работа 21 привода, что существенно снижает надежность работы и габаритно-массовые характеристики всего устройства в целом.
• Отсутствует возможность организации самоперемещения модульного робота в узком пространстве, например в прохожее между стоящими рядом строениями.
Техническим результатом предлагаемого реконфигурируемого модульного робота является повышение надежности и снижение габаритно-массовых характеристик за счет уменьшения количества приводов, упрощение конструкции, расширение функциональных возможностей устройства за счет организации самоперемещения и коллективного взаимодействия адаптивных мобильных плоских модулей и создания нескольких автономных реконфигурируемых модульных роботов из отдельных автономных адаптивных мобильных плоских модулей.
Это достигается тем, что в реконфигурируемом модульном роботе, содержащих группу адаптивных мобильных плоских модулей, содержащих линейный привод, узлы межмодульной стыковки/расстыковки и систему управления, электрически связанную с комплектом датчиков, адаптивный мобильный плоский модуль выполнен в виде активного треугольника, стороны которого выполнены в виде стержней, концы которых шарнирно соединены в вершинах активного треугольника, при этом каждый стержень выполнен в виде объединенной в плоскости активного треугольника парой противоположно направленных однотипных линейных приводов с соосными концами штоков, снабженных датчиками силы, относительного перемещения и относительной скорости, а также однотипными узлами межмодульной стыковки/расстыковки в виде пары жестко установленных на концах штоков линейных приводов стержня в плоскости активного треугольника соосных полых конусов с сопрягаемыми наружной и внутренней поверхностями, ось которых параллельна осям штоков объединенных линейных приводов, а основания направлены друг к другу, при этом каждая из вершин активного треугольника снабжена совмещенным датчиком пространственного положения и ускорений, выполненным в виде трехосного блока гироскопов-акселерометров, при этом выходы аналого-цифровых преобразователей, датчиков силы, относительного перемещения, относительной скорости, а также пространственного положения и ускорений электрически связаны со входами системы управления в виде нейрокомпьютера с соответствующим программно-алгоритмическим обеспечением, при этом выходы системы управления через шину выходных данных цифро-аналогового преобразователя подключены к входам последовательно соединенных усилителя мощности и линейных приводов, при этом адаптивный мобильный плоский модуль снабжен системой беспроводной связи с навигационной спутниковой системой и остальными адаптивными мобильными плоскими модулями, входящими в состав реконфигурируемого модульного робота.
Это достигается тем, что в способе организации движений и межмодульного взаимодействия реконфигурируемого модульного робота, заключающемся в том, что производят опрос компьютером базового адаптивного мобильного плоского модуля всех адаптивных мобильных плоских модулей группы и на его основе создают виртуальную модель реконфигурируемого модульного робота, по которой изменяют длины стержней и получают реальный реконфигурируемый модульный робот заданной формы, предварительно перед решением поставленной задачи с помощью спутниковой системы связи устанавливают все адаптивные мобильные плоские модули, находящиеся в заданном районе, из адаптивных мобильных плоских модулей расположенных ближе других к местоположению целевой задачи отбирают требуемое количество и формируют из них группу, в которой базовым адаптивным мобильным плоским модулем назначают адаптивный мобильный плоский модуль наиболее близко расположенный к местоположению целевой задачи, после этого базовый адаптивный мобильный плоский модуль передает свои координаты остальным адаптивным мобильным плоским модулям группы, назначает каждому из них место стыковки со смежными адаптивными мобильными плоскими модулями согласно виртуальной модели реконфигурируемого модульного робота в зависимости от их удаления от базового адаптивного мобильного плоского модуля и отдает команду адаптивным мобильным плоским модулям группы на самоперемещение к месту своей стыковки со смежными адаптивными мобильными плоскими модулями, при этом для самоперемещения каждого из адаптивных мобильных плоских модулей поочередно изменяют силу трения между контактными поверхностями опор вершин активного треугольника и поверхностью перемещения и организуют поочередное перемещение вершин путем согласованного изменения длин линейных приводов активного треугольника, при этом выполняют условие, при котором сила трения перемещаемой вершины должна быть меньше силы трения неподвижной вершины, для этого синхронно выдвигают шток одного из соосных линейных приводов объединенной пары и втягивают другой, после этого изменяют длину штока, связанного с перемещаемой вершиной активного треугольника, движение адаптивного мобильного плоского модуля прекращают после соосного расположения полых конусов сопрягаемых адаптивных мобильных плоских модулей, при котором устанавливают одну пару полых конусов между другой, затем увеличивают длину объединенного линейного привода с внутренней парой полых конусов до момента их полного сопряжения с наружной парой полых конусов, далее по показаниям датчиков силы и команде от системы управления адаптивного мобильного плоского модуля производят остановку объединенного линейного привода и образуют единый линейный привод из двух объединенных линейных приводов смежных активных треугольников, после стыковки всех смежных адаптивных мобильных плоских модулей группы образуют реконфигурируемый модульный робот, в случае выхода из строя какого-либо из адаптивных мобильных плоских модулей, его место в структуре реконфигурируемого модульного робота передают одному из приближающихся адаптивных мобильных плоских модулей и к месту группировки вызывают резервный адаптивный мобильный плоский модуль, находящийся в данном районе.
Это достигается тем, что в способе организации движений и межмодульного взаимодействия реконфигурируемого модульного робота для перемещения адаптивного мобильного плоского модуля в узком пространстве шириной меньше его минимальных габаритов, адаптивный мобильный плоский модуль устанавливают вертикально на вершины одной из сторон активного треугольника и организуют его перекатывающееся движение, при котором увеличивают длину тыльного вертикального стержня и смещают проекцию центра тяжести вертикального активного треугольника за пределы фронтальной опорной вершины и осуществляют плавный поворот активного треугольника до контакта его вертикальной вершины с поверхностью, после этого длину выдвинутого стержня уменьшают до первоначального состояния и линейный привод выключают, далее алгоритм перекатывающегося движения повторяют.
Это достигается тем, что в способе организации движений и межмодульного взаимодействия реконфигурируемого модульного робота для перемещения адаптивного мобильного плоского модуля в узком пространстве шириной меньше его минимальных габаритов и недостаточным рабочим ходом линейных приводов организуют его перекатывающееся движение с использованием сил инерции, при котором длину тыльного вертикального стержня увеличивают с заданной величиной ускорения и выключают его линейный привод в заданный момент времени, который определяют с помощью датчиков относительного перемещения, относительной скорости, совмещенных датчиков пространственного положения и ускорений, при этом на активный треугольник действуют силы инерции, которые поворачивают его относительно фронтальной опорной вершины до контакта вертикальной вершины с поверхностью, после этого длину выдвинутого стержня уменьшают до первоначального состояния и линейный привод выключают, далее алгоритм перекатывающегося движения повторяют.
Это достигается тем, что в способе организации движений и межмодульного взаимодействия реконфигурируемого модульного робота для перемещения адаптивного мобильного плоского модуля в узком пространстве шириной меньше его минимальных габаритов и недостаточным рабочим ходом линейных приводов организуют его движение ползком, при котором длину фронтального стержня увеличивают и смещают проекцию центра тяжести вертикального активного треугольника к тыльной опорной вершине и линейный привод выключают, затем увеличивают длину стержня, вершины которого контактируют с поверхностью и перемещают фронтальную вершину относительно неподвижной тыльной на заданный шаг и линейный привод выключают, далее длину фронтального стержня уменьшают, а длину тыльного стержня увеличивают и смещают проекцию центра тяжести вертикального активного треугольника к фронтальной опорной вершине и их линейные приводы выключают, после этого уменьшают длину стержня, вершины которого контактируют с поверхностью и перемещают тыльную вершину к неподвижной фронтальной на заданный шаг и линейный привод выключают, далее алгоритм движения ползком повторяют.
Это достигается тем, что в способе организации движений и межмодульного взаимодействия реконфигурируемого модульного робота для перемещения адаптивного мобильного плоского модуля в узком пространстве шириной меньше его минимальных габаритов с препятствиями на пути перемещения организуют его прыгающее движение с использованием сил инерции, при котором перед прыжком вертикальные стержни ориентируют в сторону прыжка и их длину согласованно увеличивают с заданной величиной ускорения и выключают соответствующие линейные приводы в заданный момент времени, которые определяют с помощью датчиков относительного перемещения, относительной скорости, совмещенных датчиков пространственного положения и ускорений, при этом на активный треугольник действуют силы инерции, которые отрывают его от поверхности и перемещают в заданном направлении, после окончания прыжка и преодоления препятствия длины стержней уменьшают до первоначального состояния и соответствующие приводы выключают, далее продолжают движение адаптивного мобильного плоского модуля по выбранному алгоритму.
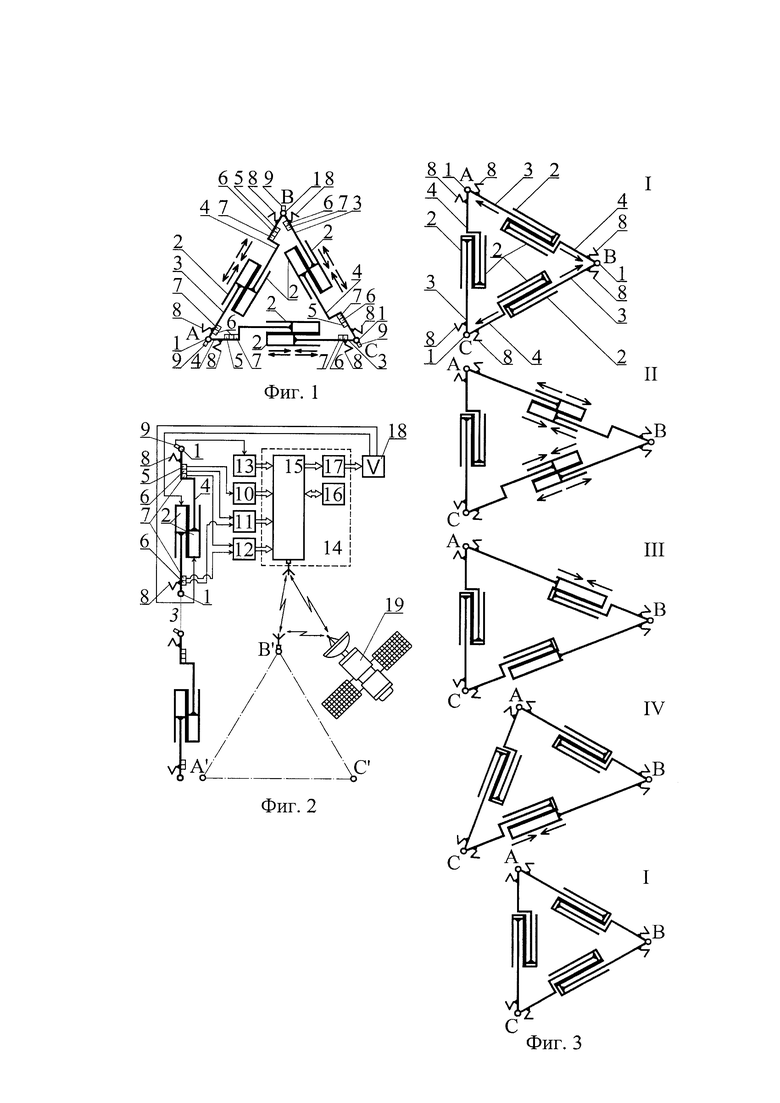
На фиг. 1 представлена кинематическая схема адаптивного мобильного плоского модуля (АМПМ) реконфигурируемого мобильного робота (РМР).
На фиг. 2 изображена структурная схема АМПМ и его взаимодействие с навигационной спутниковой системой и остальными АМПМ, входящими в состав РМР.
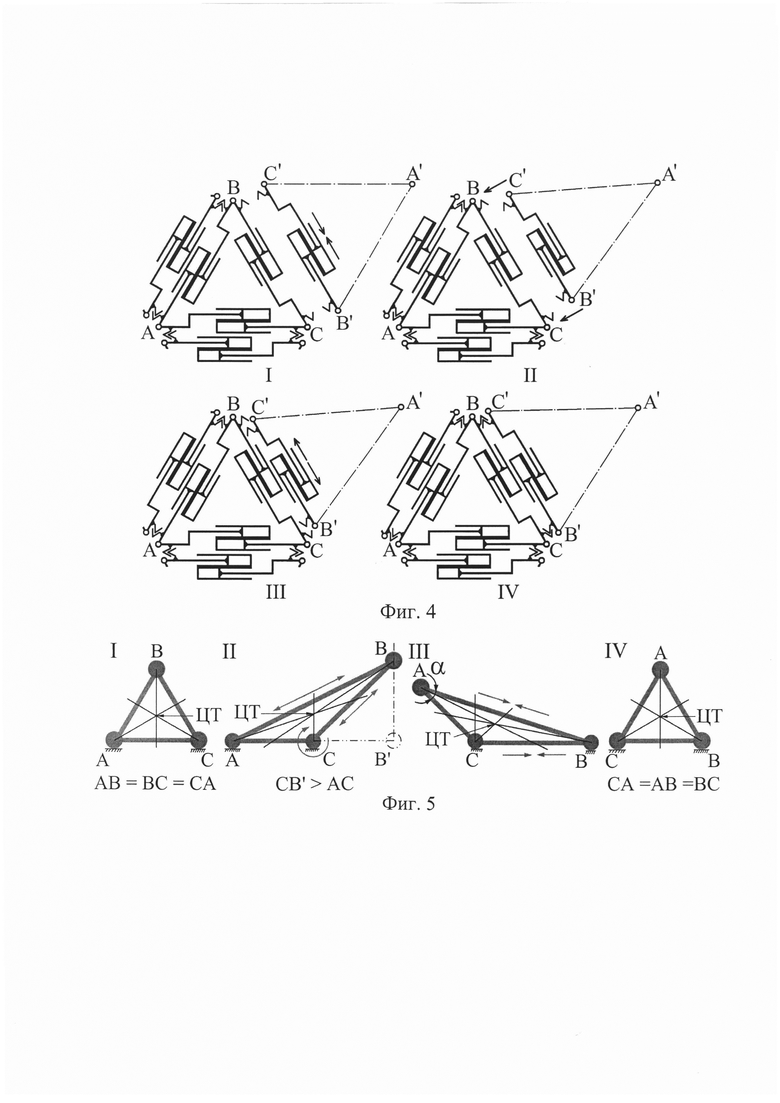
На фиг. 3 показана циклограмма перемещения АМПМ по поверхности методом «по-пластунски».
На фиг. 4 изображена схема стыковки смежных АМПМ, входящих в состав РМР.
На фиг. 5 показана циклограмма перемещения по поверхности вертикально установленного АМПМ методом перекатывания.
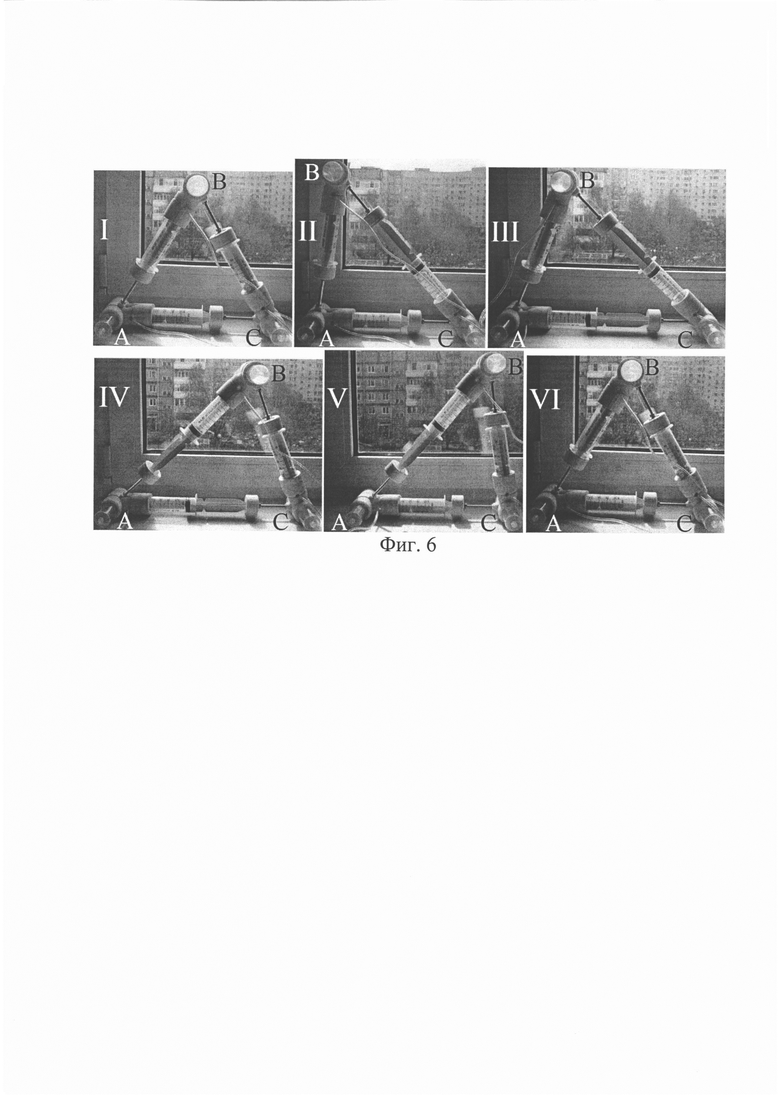
На фиг. 6 показана циклограмма перемещения ползком вертикально установленной физической модели АМПМ по горизонтальной поверхности.
АМПМ, входящий в состав РМР, выполнен в виде активного треугольника ABC, стороны которого АВ, ВС и СА выполнены в виде однотипных стержней, концы которых попарно шарнирно соединены в вершинах 1 активного треугольника ABC. При этом каждый стержень снабжен объединенной в плоскости активного треугольника ABC парой противоположно направленных однотипных линейных приводов 2 с соосными концами штоков 3 и 4, снабженных датчиками силы (ДС) 5, относительного перемещения (ДОП) 6 и относительной скорости (ДОС) 7, а также однотипными узлами межмодульной стыковки/расстыковки (УМСР). Каждый из УМСР выполнен в виде пары жестко установленных на концах штоков 3 и 4 соосных полых конусов 8 с сопрягаемыми наружной и внутренней поверхностями, ось которых параллельна осям штоков 3 и 4. При этом основания конусов 8 каждого из стержней активного треугольника ABC направлены навстречу друг другу. Каждая из вершин 1 активного треугольника ABC снабжена совмещенным датчиком пространственного положения и ускорений (ДППУ) 9, выполненным в виде трехосного блока гироскопов-акселерометров, который служит для оперативного контроля пространственного положения вершины 1 и виброускорений вдоль соответствующих стержней активного треугольника ABC с линейными приводами 2. Выходы аналого-цифровых преобразователей (АЦП) 10, 11, 12 и 13, входящих в состав ДС 5, ДОП 6, ДОС 7 и ДППУ 9 соответственно электрически связаны со входами системы управления (СУ) 14 в виде нейрокомпьютера 15 с соответствующим программно-алгоритмическим обеспечением (ПАО) 16. При этом выходы СУ 14 через шину выходных данных цифро-аналогового преобразователя (ЦАП) 17 подключены к входам последовательно соединенных усилителя мощности 18 и линейных приводов 2. При этом СУ 14 и система энергопитания (на фигурах условно не показана) выполнены автономными с возможностью обеспечения оперативного контроля и управления в реальном режиме времени. АМПМ снабжен системой беспроводной связи с навигационной спутниковой системой 19, например, типа GPS-ГЛОНАСС и остальными АМПМ, входящими в состав РМР через нейрокомпьютер 15. При необходимости вершины 1 могут быть выполнены с возможностью установки дополнительных мониторинговых и манипуляционных устройств (на фигурах условно не показаны). АМПМ работает следующим образом.
Предварительно перед решением поставленной задачи с помощью навигационной спутниковой системы 19 устанавливают местоположение всех АМПМ, находящиеся в заданном районе. Затем из АМПМ наиболее близко расположенных к местоположению целевой задачи отбирают требуемое количество АМПМ и формируют из них группу, в которой назначают базовый АМПМ, наиболее близко расположенный к местоположению целевой задачи. После этого базовый АМПМ с помощью системы беспроводной связи производит опрос всех АМПМ сформированной группы, в результате которого все АМПМ, входящие в группу обмениваются своими координатами. На основании полученных данных формируется виртуальная модель РМР, по которой по командам от СУ 14 всех АМПМ изменяют длины их стержней и, после стыковки со смежными АМПМ в назначенном базовым АМПМ порядке, получают реальный РМР заданной формы. При этом самоперемещение АМПМ на прямолинейном участке к месту своей стыковки со смежными модулями осуществляется путем ползания по-пластунски (фиг. 3) в следующей последовательности. В исходном положении все стержни АМПМ имеют минимальную длину (фиг. 3, I), а центры тяжести стержней АВ, СВ и АС будут расположены посредине. Далее по команде от СУ 14 подаются сигналы на включение линейных приводов 2 стержней, шарнирно соединенных в перемещаемой вершине 1 АМПМ, например В, и штоки 3 и 4 этих стержней выдвигаются. После их выдвижения на заданную длину, по команде СУ 14 линейные привода 2 выключаются. Контроль перемещения штоков 3, 4 линейных приводов 2 и их скоростей осуществляется с помощью соответствующих ДОП 6 и ДОС 7. Очевидно, что суммарная сила трения в местах контакта вершин А и С с поверхностью будет выше силы трения в месте контакта вершины В с поверхностью. В результате одновременного увеличения длин стержней АВ и СВ на одинаковую величину и с одинаковыми скоростями происходит прямолинейное перемещение вершины В перпендикулярно стержню АС (фиг. 3, II). При этом в процессе перемещения вершины В вершины А и С будут оставаться неподвижными, а центры тяжести стержней АВ, СВ и АС также будут расположены посредине. Далее осуществляют смещение центра тяжести стержня АВ ближе к вершине В, а центра тяжести стержня ВС - ближе к вершине С (фиг. 3, III). При этом осуществляют одновременные и с одинаковыми скоростями максимальные выдвижения штоков 3 внешних линейных приводов 2 и втягивания штоков 4 внутренних линейных приводов 2 стержней АВ и СВ. Далее сначала осуществляют максимальные втягивание штока 3 внешнего линейного привода 2 стержня АВ (фиг. 3, III и IV), а затем втягивание штока 3 внешнего линейного привода 2 стержня СВ (фиг. 3, IV и V). После этого АМПМ занимает новое исходное положение (фиг. 3, V) подобное прежнему (фиг. 3, I), но уже переместившись относительно него в направлении, перпендикулярном стержню АС. Аналогично можно организовать прямолинейные перемещения АМПМ в направлениях, перпендикулярных стержням АВ и СВ. Для организации поворота, например вершин А и В относительно вершины С, АМПМ переводят из исходного положения I в положение и IV (фиг. 3, I-IV) затем втягивают шток 3 внешнего линейного привода 2 стержня СВ. В результате произойдет поворот АМПМ относительно вершины С по часовой стрелке.
Стыковку смежных АМПМ осуществляют следующим образом. После приближения указанным выше способом стыкуемого АМПМ (А'В'С) к стыковочному АМПМ (ABC) до заданного расстояния между сторонами ВС и С'В' (фиг. 4, I), линейные привода стыкуемого АМПМ (А'В'С') выключаются. При этом стыкуемый и стыковочный АМПМ занимают положение подобное, изображенному на фиг. 1. Затем включаются линейные привода 2 стержня С'В' на втягивание штоков 3 и 4 и, после получения расстояния между вершинами его полых конусов 8 меньшего на заданную величину расстояния между основаниями полых конусов 8 стержня ВС, линейные привода 2 стержня С'В' выключаются. Далее по алгоритму, описанному выше центры тяжести стержней С'А' и В'А' смещаются к вершине А' и после этого увеличивают длины стержней С'А' и В'А' до тех пор, пока полые конусы 8 стержней С'В' и ВС не займут соосное положение, и линейные приводы 2 выключают. Затем включают линейные приводы 2 стержня С'В' и выдвигают их штоки 3 и 4 до сопряжения стыкуемых полых конусов 8 с заданным усилием, которое определяется по показаниям ДС5 стержней После выключения линейных приводов стержня С'В', стыковка смежных АМПМ произведена. Аналогично осуществляется стыковка с остальными АМПМ. Наращивание АМПМ осуществляется до получения заданной структуры РМР. В случае выхода из строя какого-либо из АМПМ, его место в структуре РМР передают одному из приближающихся АМПМ и к месту группировки вызывают резервный АМПМ, находящийся в данном районе.
В случае необходимости организации перемещения АМПМ в узком пространстве шириной меньше его минимальных габаритов, АМПМ устанавливают вертикально на вершины одной из сторон активного треугольника ABC, например, А и С (фиг. 5, I). Проекция центра тяжести (ЦТ) активного треугольника (точка пересечения его медиан) расположена посредине между вершинами А и С. Для организации поворота активного треугольника ABC с опрокидыванием относительно вершины С необходимо организовать согласованное увеличение длин стержней АВ и СВ до момента начала выполнения условия СВ'>АС и остановку соответствующих линейных приводов этих стержней (фиг. 5, II). Здесь В' - проекция вершины В на горизонтальную поверхность. В этом случае проекция ЦТ активного треугольника ABC на горизонтальную поверхность, совпадающая с линией действия силы тяжести, сместится в сторону направления заданного движения (вправо). Результирующий момент от силы тяжести активного треугольника ABC, приложенной к ЦТ, относительно контактирующей с поверхностью вершины С будет направлен по часовой стрелке и произойдет плавный поворот активного треугольника ABC в вертикальной плоскости относительно опорной вершины С (фиг. 5, III). Угол α выбирается исходя из конструктивных параметров активного треугольника ABC. После этого длины стержней АВ и СВ укорачивают до первоначальной длины и повернутый на 120° активный треугольник ABC вновь занимает исходное положение, но уже с опорными вершинами С и В и переместившись вправо на величину исходной длины своей стороны. Далее алгоритм перекатывающегося движения повторяют. При необходимости полые конусы 8 могут быть демонтированы.
В случае недостаточного рабочего хода линейных приводов стержней активного треугольника ABC организуют его перекатывающееся движение с использованием сил инерции (на фиг. 5 не показано). Для этого увеличение длины стержня АВ (фиг. 5, I) осуществляют с максимальной заданной скоростью и, после достижения максимальной длины, его линейный привод выключают. В результате возникает сила инерции, создающая дополнительный момент, который позволит получить результирующий момент (момент от силы тяжести и силы инерции), направленный в сторону запланированного поворота относительно опорной вершины С.После поворота активного треугольника ABC, длину выдвинутого стержня уменьшают до исходного значения и линейный привод выключают. Далее алгоритм перекатывающегося движения повторяют.
При отсутствии возможности организовать перекатывающееся движение активного треугольника ABC, например, в случае наклонной поверхности, может быть организовано его движение ползком. Для этого АМПМ устанавливают вертикально на вершины одной из сторон активного треугольника ABC, например, А и С (фиг. 6, I) и увеличивают длину стержня ВС. При этом проекция ЦТ активного треугольника ABC смещается к опорной вершине А и линейный привод выключают. В результате сила трения между опорной вершиной А и контактируемой поверхностью оказывается выше, чем сила трения в опорной вершине С (фиг. 6, II). Затем увеличивают длину стержня АС (фиг. 6, III). При этом благодаря разнице в величинах сил трения, опорная вершина А остается на месте, а перемещается лишь опорная вершина С. Далее одновременно уменьшают длину стержня ВС до исходного положения и увеличивают длину стержня АВ. При этом проекция ЦТ активного треугольника ABC смещается к опорной вершине С и линейный привод выключают. В результате сила трения между опорной вершиной С и контактируемой поверхностью оказывается выше, чем сила трения в опорной вершине А (фиг. 6, IV). Затем уменьшают длину стержня АС до исходного положения, и линейный привод выключают (фиг. 6, V). При этом благодаря разнице в величинах сил трения, опорная вершина С остается на месте, а перемещается лишь опорная вершина А. После уменьшения длину стержня АВ активный треугольник ABC оказывается в исходном положении, но уже переместившись на величину рабочего хода линейного привода. Далее алгоритм движения ползком повторяют.
Также для перемещения АМПМ в узком пространстве шириной меньше его минимальных габаритов и при наличии препятствий на пути перемещения, может быть организовано его прыгающее движение с использованием сил инерции. При этом, перед прыжком вертикальные стержни активного треугольника ABC ориентируют в сторону прыжка и их длину согласованно увеличивают с заданной величиной ускорения и выключают соответствующие линейные приводы 2 в заданный момент времени, которые определяют с помощью ДОП 6, ДОП 7 и ДППУ 9 (фиг. 1). При этом на активный треугольник ABC действуют силы инерции, которые отрывают его от поверхности и перемещают в заданном направлении. После окончания прыжка и преодоления препятствия длины стержней уменьшают до первоначального состояния и соответствующие линейные приводы выключают. Далее продолжают движение АМПМ по выбранному алгоритму.
Приведенные АМПМ и РМР могут быть реализованы на базе, имеющихся на сегодняшний день, разработок и функционирующих мехатронных устройств.
В качестве линейных приводов могут быть использованы широко применяемые в машиностроении электромеханические, гидравлические и пневматические линейные приводы.
Использование данного изобретения позволит повысить надежность и снизить габаритно-массовые характеристики АМПМ и РМР в целом, упростить конструкцию, расширить функциональные возможности АМПМ за счет организации самоперемещения и коллективного взаимодействия АМПМ и создания нескольких автономных РМР из отдельных АМПМ.
Изобретение относится к робототехнике, а именно к реконфигурируемым модульным роботам, содержащим адаптивные мобильные плоские модули, способные функционировать как автономно, так и коллективно в составе роевых робототехнических систем (swarm systems), и может быть использовано для индивидуальной и коллективной эксплуатации в наземной, подземной, подводной, авиационно-космический технике и инженерных сооружениях. Изобретение направлено на повышение надежности и снижение габаритно-массовых характеристик за счет уменьшения количества приводов, упрощение конструкции, расширение функциональных возможностей устройства за счет организации самоперемещения и коллективного взаимодействия адаптивных мобильных плоских модулей и создания нескольких автономных реконфигурируемых модульных роботов из отдельных автономных адаптивных мобильных плоских модулей. Адаптивный мобильный плоский модуль с собственной системой управления с датчиками и источником питания представляет собой активный треугольник, стороны которого выполнены в виде объединенных пар противоположно направленных соосных линейных приводов с узлами межмодульной стыковки/расстыковки в виде жестко установленных на свободных концах линейных приводов соосных полых конусов. 2 н. и 4 з.п. ф-лы, 6 ил.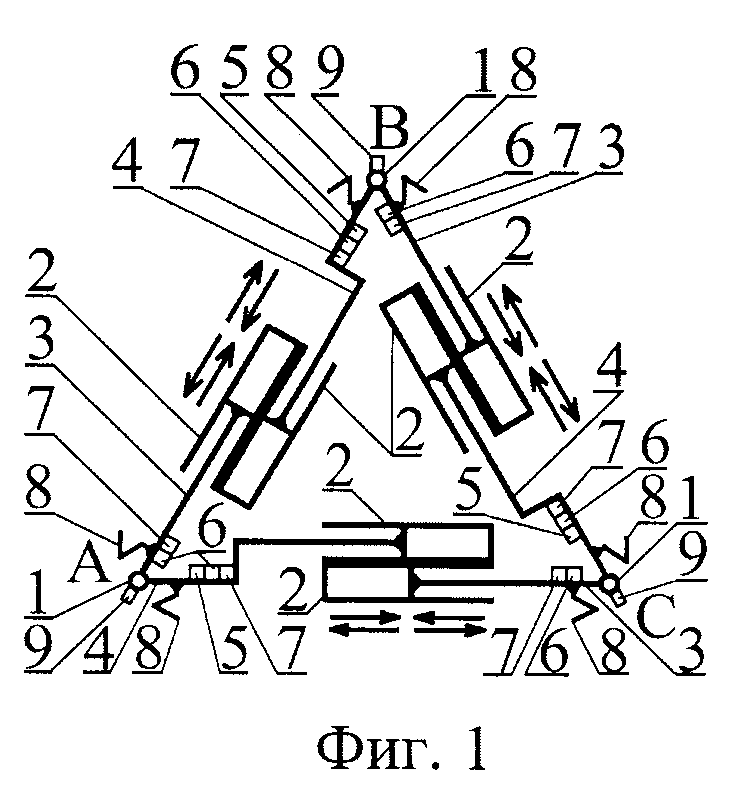
1. Реконфигурируемый модульный робот, содержащий группу адаптивных мобильных плоских модулей, содержащих линейный привод, узлы межмодульной стыковки/расстыковки и систему управления, электрически связанную с комплектом датчиков, отличающийся тем, что адаптивный мобильный плоский модуль выполнен в виде активного треугольника, стороны которого выполнены в виде стержней, концы которых шарнирно соединены в вершинах активного треугольника, при этом каждый стержень выполнен в виде объединенной в плоскости активного треугольника парой противоположно направленных однотипных линейных приводов с соосными концами штоков, снабженных датчиками силы, относительного перемещения и относительной скорости, а также однотипными узлами межмодульной стыковки/расстыковки в виде пары жестко установленных на концах штоков линейных приводов стержня в плоскости активного треугольника соосных полых конусов с сопрягаемыми наружной и внутренней поверхностями, ось которых параллельна осям штоков объединенных линейных приводов, а основания направлены друг к другу, при этом каждая из вершин активного треугольника снабжена совмещенным датчиком пространственного положения и ускорений, выполненным в виде трехосного блока гироскопов-акселерометров, при этом выходы аналого-цифровых преобразователей, датчиков силы, относительного перемещения, относительной скорости, а также пространственного положения и ускорений электрически связаны со входами системы управления в виде нейрокомпьютера с соответствующим программно-алгоритмическим обеспечением, при этом выходы системы управления через шину выходных данных цифроаналогового преобразователя подключены к входам последовательно соединенных усилителя мощности и линейных приводов, при этом адаптивный мобильный плоский модуль снабжен системой беспроводной связи с навигационной спутниковой системой и остальными адаптивными мобильными плоскими модулями, входящими в состав реконфигурируемого модульного робота.
2. Способ организации движений и межмодульного взаимодействия реконфигурируемого модульного робота, заключающийся в том, что производят опрос компьютером базового адаптивного мобильного плоского модуля всех адаптивных мобильных плоских модулей группы и на его основе создают виртуальную модель реконфигурируемого модульного робота, по которой изменяют длины стержней и получают реальный реконфигурируемый модульный робот заданной формы, отличающийся тем, что предварительно перед решением поставленной задачи с помощью спутниковой системы связи устанавливают все адаптивные мобильные плоские модули, находящиеся в заданном районе, из адаптивных мобильных плоских модулей, расположенных ближе других к местоположению целевой задачи, отбирают требуемое количество и формируют из них группу, в которой базовым адаптивным мобильным плоским модулем назначают адаптивный мобильный плоский модуль, наиболее близко расположенный к местоположению целевой задачи, после этого базовый адаптивный мобильный плоский модуль передает свои координаты остальным адаптивным мобильным плоским модулям группы, назначает каждому из них место стыковки со смежными адаптивными мобильными плоскими модулями согласно виртуальной модели реконфигурируемого модульного робота в зависимости от их удаления от базового адаптивного мобильного плоского модуля и отдает команду адаптивным мобильным плоским модулям группы на самоперемещение к месту своей стыковки со смежными адаптивными мобильными плоскими модулями, при этом для самоперемещения каждого из адаптивных мобильных плоских модулей поочередно изменяют силу трения между контактными поверхностями опор вершин активного треугольника и поверхностью перемещения и организуют поочередное перемещение вершин путем согласованного изменения длин линейных приводов активного треугольника, при этом выполняют условие, при котором сила трения перемещаемой вершины должна быть меньше силы трения неподвижной вершины, для этого синхронно выдвигают шток одного из соосных линейных приводов объединенной пары и втягивают другой, после этого изменяют длину штока, связанного с перемещаемой вершиной активного треугольника, движение модуля прекращают после соосного расположения полых конусов сопрягаемых модулей, при котором устанавливают одну пару полых конусов между другой, затем увеличивают длину объединенного линейного привода с внутренней парой полых конусов до момента их полного сопряжения с наружной парой полых конусов, далее по показаниям датчиков силы и команде от системы управления адаптивного мобильного плоского модуля производят остановку объединенного линейного привода и образуют единый линейный привод из двух объединенных линейных приводов смежных активных треугольников, после стыковки всех смежных адаптивных мобильных плоских модулей группы образуют реконфигурируемый модульный робот, в случае выхода из строя какого-либо из адаптивных мобильных плоских модулей, его место в структуре реконфигурируемого модульного робота передают одному из приближающихся адаптивных мобильных плоских модулей и к месту группировки вызывают резервный адаптивный мобильный плоский модуль, находящийся в данном районе.
3. Способ организации движений и межмодульного взаимодействия реконфигурируемого модульного робота по п. 2, отличающийся тем, что для перемещения адаптивного мобильного плоского модуля в узком пространстве шириной меньше его минимальных габаритов, адаптивный мобильный плоский модуль устанавливают вертикально на вершины одной из сторон активного треугольника и организуют его перекатывающееся движение, при котором увеличивают длину тыльного вертикального стержня и смещают проекцию центра тяжести вертикального активного треугольника за пределы фронтальной опорной вершины и осуществляют плавный поворот активного треугольника до контакта его вертикальной вершины с поверхностью, после этого длину выдвинутого стержня уменьшают до первоначального состояния и линейный привод выключают, далее алгоритм перекатывающегося движения повторяют.
4. Способ организации движений и межмодульного взаимодействия реконфигурируемого модульного робота по п. 2, отличающийся тем, что для перемещения адаптивного мобильного плоского модуля в узком пространстве шириной меньше его минимальных габаритов и недостаточным рабочим ходом линейных приводов организуют его перекатывающееся движение с использованием сил инерции, при котором длину тыльного вертикального стержня увеличивают с заданной величиной ускорения и выключают его линейный привод в заданный момент времени, который определяют с помощью датчиков относительного перемещения, относительной скорости, совмещенных датчиков пространственного положения и ускорений, при этом на активный треугольник действуют силы инерции, которые поворачивают его относительно фронтальной опорной вершины до контакта вертикальной вершины с поверхностью, после этого длину выдвинутого стержня уменьшают до первоначального состояния и линейный привод выключают, далее алгоритм перекатывающегося движения повторяют.
5. Способ организации движений и межмодульного взаимодействия реконфигурируемого модульного робота по п. 2, отличающийся тем, что для перемещения адаптивного мобильного плоского модуля в узком пространстве шириной меньше его минимальных габаритов и недостаточным рабочим ходом линейных приводов организуют его движение ползком, при котором длину фронтального стержня увеличивают и смещают проекцию центра тяжести вертикального активного треугольника к тыльной опорной вершине и линейный привод выключают, затем увеличивают длину стержня, вершины которого контактируют с поверхностью и перемещают фронтальную вершину относительно неподвижной тыльной на заданный шаг и линейный привод выключают, далее длину фронтального стержня уменьшают, а длину тыльного стержня увеличивают и смещают проекцию центра тяжести вертикального активного треугольника к фронтальной опорной вершине и их линейные приводы выключают, после этого уменьшают длину стержня, вершины которого контактируют с поверхностью и перемещают тыльную вершину к неподвижной фронтальной на заданный шаг и линейный привод выключают, далее алгоритм движения ползком повторяют.
6. Способ организации движений и межмодульного взаимодействия реконфигурируемого модульного робота по п. 2, отличающийся тем, что для перемещения адаптивного мобильного плоского модуля в узком пространстве шириной меньше его минимальных габаритов с препятствиями на пути перемещения организуют его прыгающее движение с использованием сил инерции, при котором перед прыжком вертикальные стержни ориентируют в сторону прыжка и их длину согласованно увеличивают с заданной величиной ускорения и выключают соответствующие линейные приводы в заданный момент времени, которые определяют с помощью датчиков относительного перемещения, относительной скорости, совмещенных датчиков пространственного положения и ускорений, при этом на активный треугольник действуют силы инерции, которые отрывают его от поверхности и перемещают в заданном направлении, после окончания прыжка и преодоления препятствия длины стержней уменьшают до первоначального состояния и соответствующие приводы выключают, далее продолжают движение адаптивного мобильного плоского модуля по выбранному алгоритму.
| УНИВЕРСАЛЬНЫЙ ТРАНСФОРМИРУЮЩИЙСЯ МОДУЛЬНЫЙ РОБОТ | 1998 |
|
RU2166427C2 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР И СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЙ И КОНТРОЛЯ ФИЗИКО-МЕХАНИЧЕСКИХ СВОЙСТВ И ГЕОМЕТРИЧЕСКОЙ ФОРМЫ КОНТАКТИРУЕМОЙ ПОВЕРХНОСТИ И ТРАЕКТОРИИ ПЕРЕМЕЩЕНИЯ С ЕГО ПОМОЩЬЮ | 2009 |
|
RU2424893C2 |
| ГЕТЕРОГЕННЫЙ МОДУЛЬНЫЙ РЕКОНФИГУРИРУЕМЫЙ МОБИЛЬНЫЙ РОБОТ | 2020 |
|
RU2744050C1 |
| Бетонная смесь | 1975 |
|
SU547421A1 |
