Область техники
Изобретение относится к области гидроакустики и может быть использовано для обнаружения низкоскоростного движения малоразмерных необитаемых подводных объектов на малых дистанциях, в условиях, когда применение активных гидроакустических способов затруднено или невозможно. Движение таких объектов, как правило, может сопровождаться широкополосным акустическим шумом [1].
Уровень техники
Известен способ обнаружения подводного источника широкополосного шума [2], включающий прием шумового сигнала комбинированным приемником, содержащим приемник звукового давления и трехкомпонентный приемник вектора колебательной скорости частиц среды, при котором формируют набор частотных каналов, охватывающий весь наблюдаемый частотный диапазон, вычисляют в каждом частотном канале средние величины трех компонент вектора плотности потока энергии, назначают равные горизонтальные угловые секторы, охватывающие весь горизонт наблюдения, вычисляют для каждого углового сектора величину секторной интенсивности потока энергии и назначают ее в качестве пороговой, выделяют секторы с превышением пороговой величины, формируют мгновенное угловое распределение интенсивности потока энергии, выполняют цикл обработки временных фрагментов принятого сигнала, сдвинутых на фиксированный интервал времени, определяют доминирующий угловой сектор с максимальной величиной интенсивности потока энергии, и принимают решение об обнаружении источника широкополосного шума по уровню превышения пороговой величины интенсивности потока энергии в доминирующем угловом секторе.
Недостатком известного способа является использование пороговых механизмов обнаружения, основанных на вычислении только интенсивности энергии шумового сигнала, что увеличивает вероятность ложных срабатываний, которая формируется из-за отсутствия данных о спектральных характеристиках источника, и снижает вероятность обнаружения при отсутствии дискретных составляющих в спектре источника шума.
Также известен способ обнаружения подводного источника широкополосного шума [3], в котором прием шумового сигнала выполняют двумя комбинированными приемниками, выставленных в акватории в двух точках с известными координатами, приемники снабжены средствами контроля положения их угловых осей, а также средствами связи, по которым от каждого приемника результаты синхронизированного вычисления средних значений компонент вектора интенсивности в каждом выделенном частотном канале передаются в пункт обработки данных, проверяют устойчивость спектральных портретов источников шума, сравнивая спектральные энергетические портреты сигналов, принятых в доминирующих угловых секторах первым и вторым приемником, решение об обнаружении источника принимают по совокупности данных о временной устойчивости спектральных энергетических портретов, полученных приемниками в течение времени наблюдения, и степени их идентичности в каждом приемнике.
Недостатками данного известного способа является использование пороговых механизмов обнаружения и предположения о временной устойчивости спектральных характеристик в процессе обнаружения источника, что снижает вероятность обнаружения при отсутствии дискретных составляющих в спектре источника шума.
Наиболее близким к заявляемому изобретению является способ обнаружения подводного объекта на охраняемой морской акватории, принятый за прототип [4]. Согласно известному способу, подводный объект обнаруживают по выходным сигналам гидроакустических приемников, а в качестве акустических волн используют естественное шумовое излучение водной поверхности охраняемой морской акватории во время шторма или атмосферных осадков, при этом гидроакустические приемники выполняют с вертикальными характеристиками направленности и располагают под предполагаемым курсом следования подводного объекта неподвижно или с возможностью их пространственного перемещения параллельно водной поверхности охраняемой морской акватории. При появлении подводного объекта в охраняемой акватории некоторые из приемников экранируются корпусом объекта, что позволяет обнаруживать последний по изменению уровня шумового сигнала водной поверхности на выходе соответствующих приемников.
Недостатком прототипа является низкая эффективность его применения в отсутствие шторма или атмосферных осадков, большая вероятность ложных срабатываний вследствие изменения уровня шумового сигнала водной поверхности во времени, и необходимость большого количества гидроакустических приемников для повышения вероятности обнаружения объекта при его движении.
Техническая проблема, решаемая посредством заявляемого изобретения, заключается в устранении недостатков, характерных для прототипа и аналогов, за счет создания способа, позволяющего исключить ложные срабатывания и обнаруживать источник шума во время его движения.
Краткое раскрытие сущности изобретения
Технический результат, достигаемый при использовании заявляемого технического решения, заключается в обеспечении возможности обнаружения источника шума во время его движения, в том числе, за счет определения изменения во времени спектральных свойств излучаемого шума.
Заявленный технический результат достигается тем, что в способе обнаружения движения подводного источника широкополосного шума, включающем прием и регистрацию акустических волн гидроакустическими приемниками, анализ спектров интенсивности шума, согласно техническому решению, акустические волны регистрируют через равные временные интервалы, при этом для соседних временных интервалов определяют спектры интенсивности шума, в низкочастотной части которых выделяют участки с постоянным углом наклона спектра, для которых определяют значения угла наклона спектра и значения частот, соответствующих положению точек разрыва производной функции зависимости амплитуды спектра от частоты, при изменении которых постоянный угол наклона спектра изменяется или не может быть достоверно определен, по выявлению однонаправленного изменения в соседних временных интервалах значений угла наклона спектра и положения точек разрыва производной делают вывод об обнаружении движения подводного источника широкополосного шума.
Заявляемый способ может быть реализован в отношении скоростей не выше 2-2.5 м/с. Постоянный угол наклона спектра изменяется или не может быть достоверно определен, например, в случаях, если присутствуют множественные дискретные пики в той части спектра, где необходимо определить наклон.
Осуществление изобретения
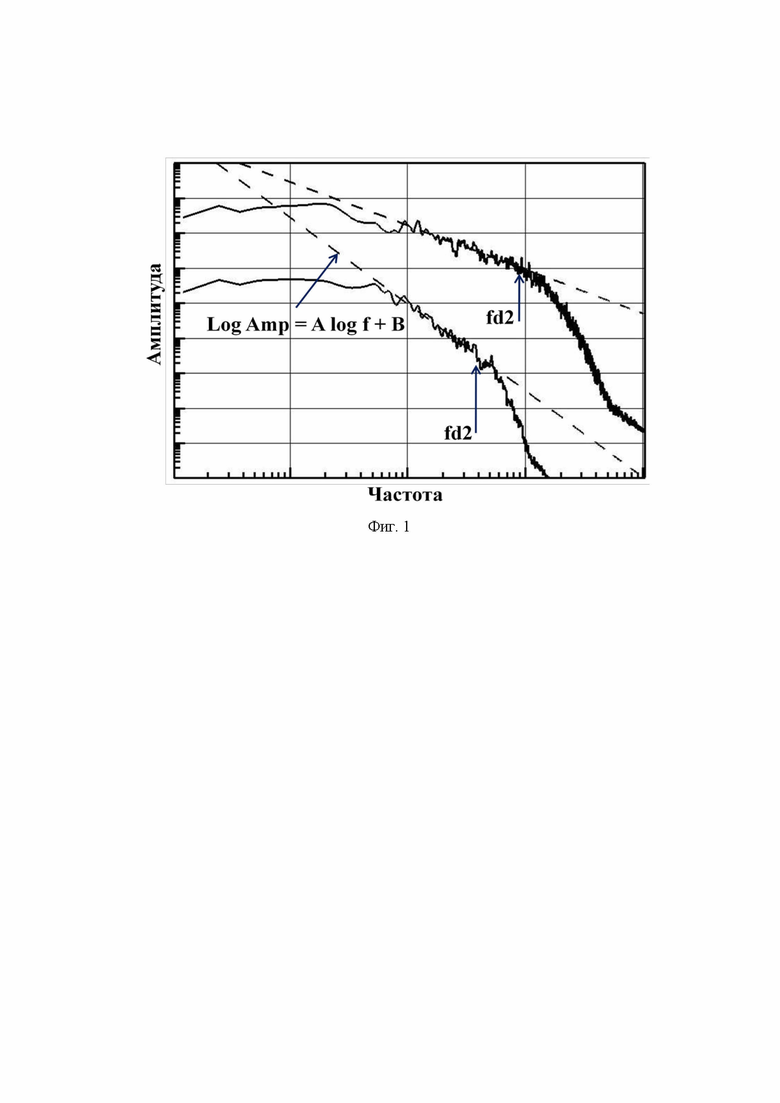
Сущность заявляемого изобретения поясняется нижеследующим описанием. При низкоскоростном движении малогабаритного подводного объекта, как показано, например, в работе [1], спектр излучаемого объектом шума при различных скоростях движения сохраняет одну и ту же качественную зависимость его интенсивности от частоты (рис. 5,6,7 из работы [1]). Так, на первом интервале, при частотах вблизи 0 и выше, амплитуда изменяется незначительно с возрастанием частоты. На втором интервале с увеличением частоты наблюдается монотонное снижение интенсивности спектра. На более высоких частотах, на третьем интервале, интенсивность сохраняется близкой к постоянной. При отсутствии движения объекта в режиме свободного планирования дискретные частоты в сплошном спектре не наблюдаются, его интенсивность снижается, но качественный вид спектра сохраняется. Границы перехода между указанными выше условными интервалами хорошо определяются, поскольку на первом и третьем интервалах интенсивность практически не зависит от частоты, а на втором интервале наблюдается наиболее сильное падение интенсивности с ростом частоты, и угол наклона спектра в этом интервале может рассматриваться в качестве постоянной величины (рис. 5,6,7 из работы [1]). В случае отсутствия/осреднения выделенных пиков в спектре его форма на втором из перечисленных выше интервалов, в диапазоне частот fd1<f<fd2,может быть представлена в виде log Amp = A log f + B, где Amp - амплитуда, f - частота, А и В – коэффициенты, величина А отрицательна и описывает наклон спектра, а fd1 и fd2 – точки разрыва производной, вне которых наклон спектра А либо существенно изменяется, либо не может быть определен в качестве постоянной величины. При движении излучающего шум объекта происходит изменение расстояния между приемниками шумового сигнала и объектом, которое может быть определено по одновременному изменению величин наклона спектра А и величины fd2 в одном и том же направлении на соседних интервалах времени. Все указанные выше отличительные признаки заявляемого изобретения являются необходимыми для его реализации и позволяют обнаруживать движение подводного источника шума по изменению его спектральных свойств.
Достижение технического результата основано на следующем эффекте. Распространение в пространстве шума, излучаемого объектом, сопровождается неоднородным уменьшением амплитуды на разных частотах - высокие частоты затухают быстрее, чем низкие [5,6]. Установлено, что вследствие этого по мере увеличения расстояния между источником шума и приемником, в спектре из получаемого приемником сигнала меняются указанные выше количественные параметры, характеризующие форму наиболее быстро падающей части спектра: не только величина А, но и fd2 уменьшаются. Наоборот, с уменьшением расстояния между приемником и источником шума, указанные величины увеличиваются. На основании регулярного во времени изменения расстояния между неподвижным приемником и источником шума можно сделать вывод о движении последнего. Решение об обнаружении движения источника шума может приниматься следующим образом. В равные между собой интервалы времени ti производят прием сигнала колебательной скорости приемником, за каждым из которых в течение равных интервалов времени Тi(i=1,2,3,4......N) проводят построение спектра и определение необходимых для принятия решения величин А и fd2. Для принятия решения об обнаружении движения необходимо минимум три такта прием-обработка: t1, T1, t2, T2, t3, T3 и два сравнения полученных результатов в соседних временных интервалах, сначала между T2 и T1, затем между T3 и T2. Если эти два сравнения показывают изменение величин А и fd2 в одном и том же направлении, например, уменьшение в обоих сравнениях, то расстояние увеличивается и источник шума удаляется от приемника. Если же указанные величины по результатам двух последовательных сравнений увеличиваются, то источник шума приближается к приемнику.
Однонаправленное изменение указанных выше параметров позволяет снизить вероятность ложных срабатываний, например, в тех случаях, когда величина А не является постоянной, либо не может быть достоверно определена вследствие присутствия дискретных пиков в спектре. Но даже в этом случае положение точки разрыва производной fd2 может быть достоверно определено.
Пример реализации способа
Для выявления изменения параметров спектра при удалении от источника шума, проведен численный эксперимент для жидкости в сферическом зазоре, в качестве источника шума рассматривались широкополосные колебания (белый шум) угловой скорости вращения Ω внутренней границы с радиусом r1.
Рассматривался сферический источник белого шума (с равномерным на всех частотах спектром) радиусом r1. На различных расстояниях r от источника шума до точек измерения проводилась запись зависимости колебательной скорости жидкости от времени, вычисляли энергетический спектр. С изменением расстояния от источника шума форма спектра изменяется описанным выше образом.
Некоторые результаты, а именно параметры спектров, приведены в таблице 1. На фигуре 1 в логарифмических координатах амплитуда-частота представлены иллюстративные схемы полученных расчетных спектров, линией сверху показан спектр при минимальном расстоянии от источника шума, нижней линией - при максимальном расстоянии. Качественный вид спектров на фигуре 1 при частотах, меньших чем fd2, соответствует качественному виду экспериментальных спектров на первом и втором интервалах из работы [1]. Штрих - пунктирные линии на фигуре 1 соответствуют приведенной выше аппроксимации в виде log Amp = A log f + B, своей для каждого из спектров.
Таким образом, по изменению вида спектра мы можем определить изменение расстояния между приемником и источником шума. А поскольку приемник неподвижен, двигается источник шума.
Таблица 1. Зависимость наклона спектра А и нормированной частоты fd2 от относительного расстояния (r/r1)-1 между источником шума и точками измерения.
Установлено, что увеличение расстояния от источника шума до точки, в которой проводятся измерения r более чем в 4 раза приводит к снижению величин А и fd2 почти в два раза. Предположим, что приведенные результаты получены в моменты времени Т1, Т2 и Т3, Т3 ˃ Т2 ˃ Т1. Сравнение в моменты времени Т2 и Т1 показывает снижение величин А и fd2 с увеличением времени. Такое же снижение видно из сравнения Т2 и Т3. Условно на фигуре 1 можно представить верхний спектр, как полученный в момент времени Т1, а нижний спектр – как полученный в момент времени Т3. В обоих сравнениях наблюдается однонаправленное уменьшение А и fd2, что означает увеличение расстояния между приемником и источником шума. Поскольку в реальности приемник неподвижен, то такая ситуация соответствует движению источника широкополосного шума в направлении от приемника.
Указанные результаты подтверждают достоверность отличительных признаков, на которых основано заявляемое изобретение. Использование предлагаемого изобретения позволяет обнаруживать движение подводного источника шума за счет определения изменения во времени его спектральных характеристик.
Источники
1. Хворостов Ю.А., Матвиенко Ю.В.// Характеристики собственного шумоизлучения малогабаритного АНПА. Подводные исследования и робототехника. 2019. №4 (30). С. 58-63.
2. Матвиенко Ю.В., Хворостов Ю.А., Каморный А.В.// Способ обнаружения подводного источника широкополосного шума. Патент РФ 2699923, опубл. 11.09.2019.
3. Матвиенко Ю.В., Хворостов Ю.А., Каморный А.В.// Способ обнаружения подводного источника широкополосного шума. Патент РФ 2715431, опубл. 28.02. 2020.
4. Аббясов З., Власов Ю.Н., Маслов В.К., Сильвестров С.В., Толстоухов А.Д., Цыганов С.Г. // Способ обнаружения подводного объекта на охраняемой морской акватории. Патент РФ 2177626, опубл. 27.12.2001 (Прототип).
5. Жиленко Д.Ю., Кривоносова О.Э. Усиление волн при вращательных колебаниях жидкости// Письма в ЖЭТФ, 2015, т. 104, №8, С. 552-559.
6. Жиленко Д.Ю., Кривоносова О.Э. Влияние широкополосных флуктуаций скорости вращения на течения в сферических слоях// ЖТФ, 2021, т.91, №6, С.933-940.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2177626C2 |
| Способ обнаружения подводного источника широкополосного шума | 2019 |
|
RU2715431C1 |
| Способ скрытного гидроакустического поиска автономного донного подводного объекта | 2021 |
|
RU2762349C1 |
| Способ обнаружения подводного источника широкополосного шума | 2022 |
|
RU2787951C1 |
| Способ регистрации малошумного морского объекта с использованием медианной фильтрации | 2016 |
|
RU2616357C1 |
| СПОСОБ РЕГИСТРАЦИИ МАЛОШУМНОГО МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2572052C2 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ПРИ ИХ ВТОРЖЕНИИ В ОХРАНЯЕМУЮ ЗОНУ | 2013 |
|
RU2559701C2 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2436134C1 |
| СПОСОБ ПАРАМЕТРИЧЕСКОГО ПРИЕМА ГИДРОФИЗИЧЕСКИХ И ГЕОФИЗИЧЕСКИХ ВОЛН В МОРСКОЙ СРЕДЕ | 2013 |
|
RU2536837C1 |
| РАДИОГИДРОАКУСТИЧЕСКАЯ СИСТЕМА МОБИЛЬНОГО ПОИСКА МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ И ДОННЫХ ОБЪЕКТОВ, ОБНАРУЖЕНИЯ ПРИЗНАКОВ ЗАРОЖДЕНИЯ ОПАСНЫХ МОРСКИХ ЯВЛЕНИЙ НА МОРСКОМ ШЕЛЬФЕ | 2015 |
|
RU2601769C2 |
Использование: изобретение относится к области гидроакустики. Сущность: в способе обнаружения низкоскоростного движения малоразмерных необитаемых подводных объектов на малых дистанциях, в условиях, когда применение активных гидроакустических способов затруднено или невозможно, осуществляют прием и регистрацию акустических волн гидроакустическими приемниками и анализируют спектры интенсивности шума, в частности участки с постоянным углом наклона. Технический результат: обеспечение возможности обнаружения источника шума во время его движения, в том числе за счет определения изменения во времени спектральных свойств излучаемого шума. 1 ил.
Способ обнаружения движения подводного источника широкополосного шума, включающий прием и регистрацию акустических волн гидроакустическими приемниками, анализ спектров интенсивности шума, отличающийся тем, что акустические волны регистрируют через равные временные интервалы, при этом для соседних временных интервалов определяют спектры интенсивности шума, в низкочастотной части которых выделяют участки с постоянным углом наклона, для которых определяют значения угла наклона спектра и значения частот, соответствующих положению точек разрыва производной функции зависимости амплитуды спектра от частоты, при изменении которых постоянный угол наклона спектра изменяется или не может быть достоверно определен, по выявлению однонаправленного изменения в соседних временных интервалах значений угла наклона спектра и положения точек разрыва производной делают вывод об обнаружении движения подводного источника широкополосного шума.
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2177626C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЧАСТОТНЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1995 |
|
RU2096808C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА ПО ИЗМЕРЕНИЯМ УГЛОВЫХ КООРДИНАТ | 2016 |
|
RU2608583C1 |
| АВТОМАТИЗИРОВАННАЯ ПОТОЧНАЯ ЛИНИЯ ДЛЯ УПАКОВКИ РАДИОАКТИВНЫХ ОТХОДОВ | 1992 |
|
RU2012081C1 |
| JP 2010085120 A, 15.04.2010. | |||

