Область изобретения
Настоящее изобретение относится к системам и способам загрузки дискретных изделий в приемник и, более конкретно, к системам и способами загрузки пищевых изделий в приемники.
Предпосылки
Дискретные пищевые изделия, такие как сосиски и сардельки, продаются в упаковках, в которых изделия уложены бок о бок параллельно. В некоторых упаковках имеется только один слой; в других упаковках, чаще всего, сосисок, пищевые изделия уложены двумя или более слоями. Когда пищевые изделия упакованы одним слоем или двумя или более слоями, каждый слой может состоять из четыре, пяти или шести предметов.
Создание одной упаковочной машины с достаточным количеством систем загрузки пищевых изделий для большого количества разных упаковочных конфигурация экономически нецелесообразно, особенно при изменяющемся количестве пищевых изделий в каждом слое. Следовательно, системы загрузки пищевых изделий конструируют с возможностью наладки для создания разных вариантов расположения пищевых изделий, как в отношении количества пищевых изделий в каждом слое, так и в отношении количества слоев пищевых изделий.
Другим фактором, который должны учитывать системы загрузки пищевых изделий, является то, что пищевые изделия типично помещаются в независимые вращающиеся ориентаторы, которые подают пищевые изделия на струнные транспортеры, которые быстро и непрерывно транспортируют пищевые изделия конец-в-конец в систему загрузки. Система загрузки должна быть рассчитана на прием непрерывного потока пищевых изделий, группировку их в заранее выбранные группы, например, по пять изделий и, затем, помещать их в приемники соответствующей формы. Система загрузки пищевых изделий, таким образом, должна накапливать непрерывный поток входящих пищевых изделий пока система загрузки располагает ранее принятые пищевые изделия в заранее выбранные группы и укладывает их в соответствующие приемники.
Существуют известные конструкции систем загрузки пищевых изделий, которые могут принимать непрерывный поток водящих пищевых изделий, организуя из в заранее выбранные группы и укладывая эти группы в приемники. Однако такие системы загрузки занимают относительно большую площадь и поэтому требуют чрезмерного пространства на полу цеха упаковки. Поскольку операция упаковки должна проводиться в герметизированном помещении с жестко контролируемой средой в отношении фильтрования воздуха, избыточного давления воздуха и чистоты, пространство в таком помещении стоит весьма дорого.
Дополнительно, известные конструкции могут представлять трудность для очистки и для переналадки для перехода на другие конфигурации упаковки. Такие конструкции могут потребовать замены и регулировки многих компонентов, что приводит к нежелательным простоям не только самой системы загрузки, но и всей, расположенной перед ней системы обработки пищевых изделий.
Соответственно, имеется потребность в системе и способе загрузки пищевых изделий, принимающей большой и непрерывный входной поток, которая легко переналаживается и работает на минимальной площади цеха упаковки.
Краткое описание изобретения
Раскрываемые система и способ загрузки пищевых изделий устраняют недостатки известных конструкций. Система загрузки является масштабируемой, что позволяет применять работающие независимо одну, две или несколько систем загрузки. Конструкция раскрываемой системы загрузки требует минимального интервала между системами загрузки, что сводит к минимуму требуемую площадь цеха упаковки. Отдельные компоненты раскрываемой системы загрузки пищевых изделий являются модульными, что облегчает их быстрое извлечение из системы, что позволяет проводить переналадку с минимальным временем простоя.
В одном варианте система загрузки пищевых изделий содержит корпус; челночный транспортер, имеющий первую ленту с первым набором лопаток для приема отдельный пищевых изделий, при этом первая лента имеет верхнюю ветвь и нижнюю ветвь, челночный транспортер установлен на корпусе для относительного продольного возвратно-поступательного движения; верхний привод, взаимодействующий с верхней ветвью челночного транспортера; нижний привод, взаимодействующий с нижней ветвью челночного транспортера; загрузочную головку, имеющую вторую ленту со вторым набором лопаток для приема пищевых изделий с нижней ветви челночного транспортера, при этом вторая лента имеет верхнюю ветвь и нижнюю ветвь; и управляющее устройство для активации каждого из верхнего привода и нижнего привода для приведения их в действие с выбранной скоростью, тем самым заставляя первую ленту вращаться по круговой траектории, а челночный транспортер выполнять продольные возвратно-поступательные движения для приема и удержания первого заранее определенного количества пищевых изделий и для укладки второго заранее определенного количества удлиненных пищевых изделий на вторую ленту с выбранной частотой.
В другом варианте система загрузки пищевых изделий содержит накопитель для приема и накопления отдельных пищевых изделий, и для выгрузки пищевых изделий; загрузочную головку, имеющую ленту со множеством лопаток для приема пищевых изделий из накопителя, при этом лента имеет верхнюю ветвь и нижнюю ветвь, и загрузочная головка имеет переднюю направляющую на принимающей пищевые изделия конце, и заднюю направляющую, при этом передняя направляющая имеет больший радиус кривизны, чем радиус кривизны задней направляющей, при этом вторая лента загрузочной головки проходит вокруг передней направляющей и задней направляющей так, чтобы пространство между соседними лопатками второй ленты расширялось наружу в точке, где вторая лента впервые встречается с передней направляющей для приема пищевых изделий, выгружаемых из транспортера накопителя; и управляющее устройство для активации накопителя и ленты загрузочной головки для работы с выбранной скоростью, тем самым заставляя накопитель принимать и удерживать заранее определенное количество пищевых изделий в течение заранее определенного временного интервала, и укладывать второе заранее определенное количество пищевых изделий на вторую ленту с выбранной частотой так чтобы загрузочная головка принимала пищевые изделия между лопаток второй ленты заранее определенными разнесенными группами.
В еще одном варианте способ загрузки пищевых изделий в приемники содержит этапы, на которых принимают и накапливают пищевые изделия в накопителе; выгружают пищевые изделия из накопителя заранее определенным разнесенными группами в загрузочную головку; принимают пищевые изделия последовательно заранее выбранными граппами из накопителя на принимающий пищевые изделия конец между лопатками бесконечной ленты загрузочной головки, проходящей вокруг передней направляюще и задней направляющей, при том передняя направляющая имеет больший радиус кривизны, чем радиус кривизны задней направляющей, и интервалы между соседними лопатками бесконечной ленты расширяются наружу в точке, где бесконечная лента впервые встречается с передней направляющей для определения отверстия для приема пищевых изделий для приема пищевых изделий, выгружаемых из накопителя; транспортируют пищевые изделия заранее выбранными группами на ленте на нижнюю ветвь ленты на верхний скользящий затвор; и синхронизируют движение ленты относительно движения первой ленты для создания интервала между заранее выбранными группами пищевых изделий на верхнем скользящем затворе; открывают верхний скользящий затвор, чтобы первый заранее выбранный набор групп пищевых изделий упал на разделяющий лоток, который удерживает заранее выбранные группы на нижнем скользящем затворе; и открывают нижний скользящий затвор, чтобы первый заранее выбранный набор групп пищевых изделий упал в дискретные контейнеры.
Другие объекты и преимущества предлагаемых системы и способа загрузки пищевых изделий будут понятны из нижеследующего описания, чертежей и приложенной формулы.
Краткое описание чертежей
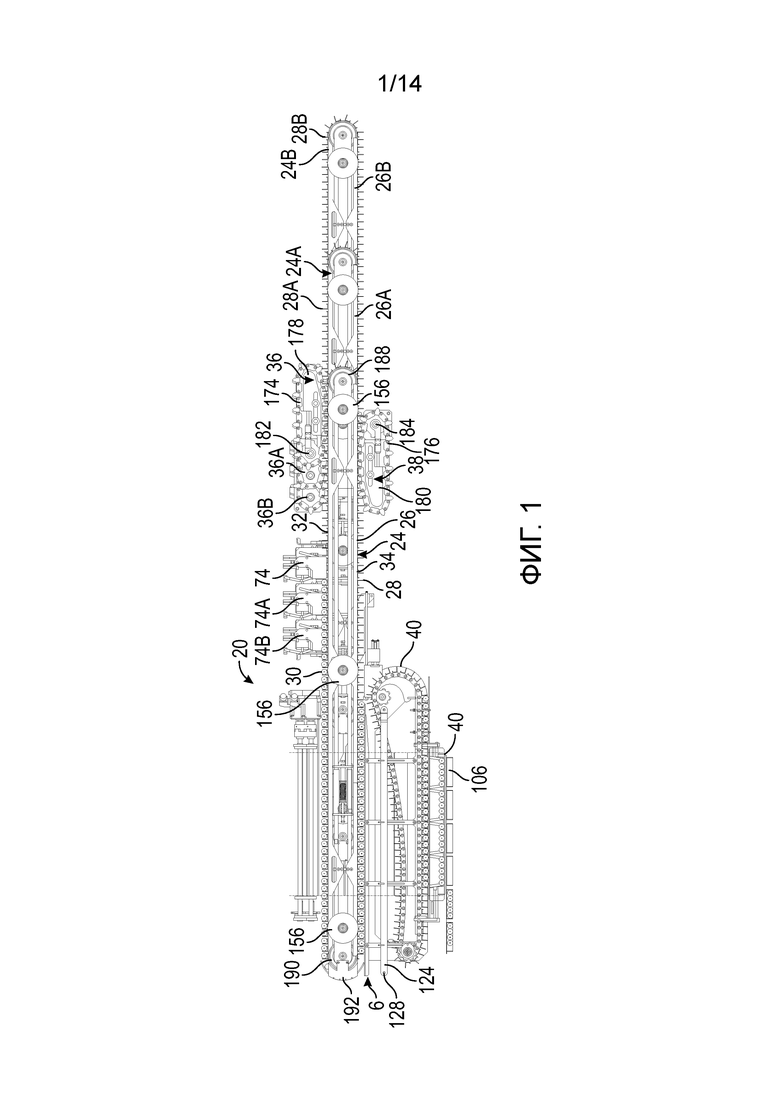
Фиг. 1 - боковая проекция предлагаемой системы загрузки пищевых изделий, где корпус не показан для ясности.
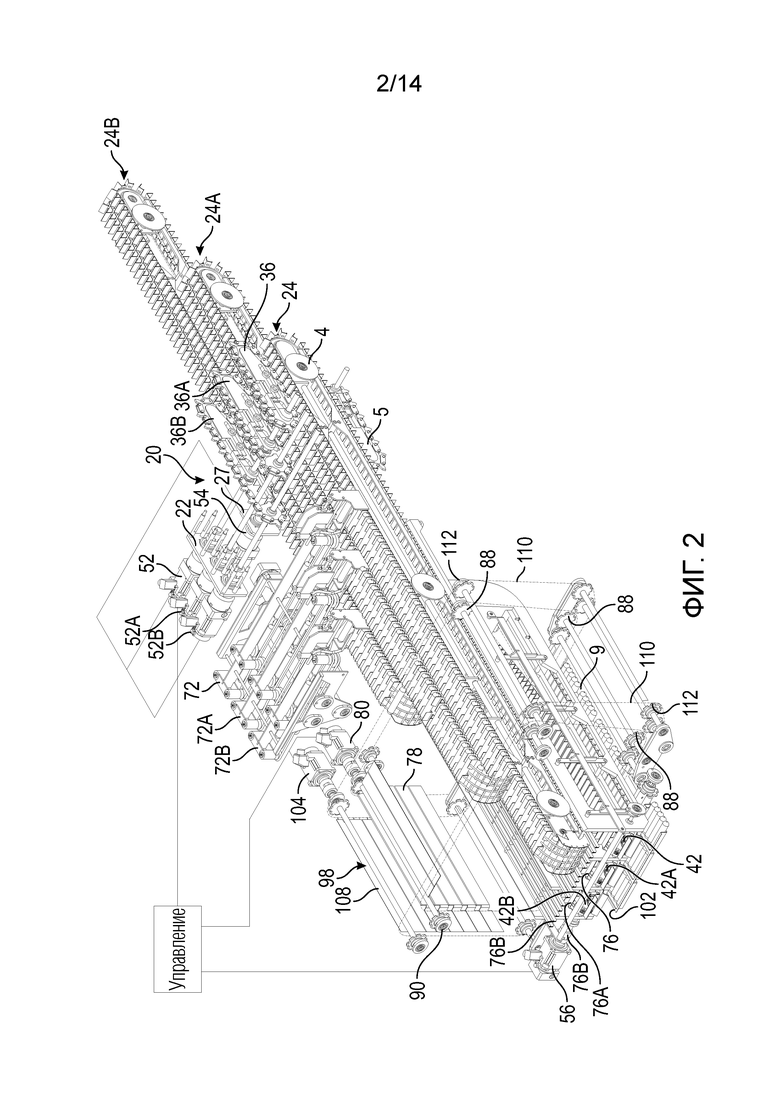
Фиг. 2 - вид в перспективе сверху системы загрузки пищевых изделий по фиг. 1, где корпус не показан для ясности.
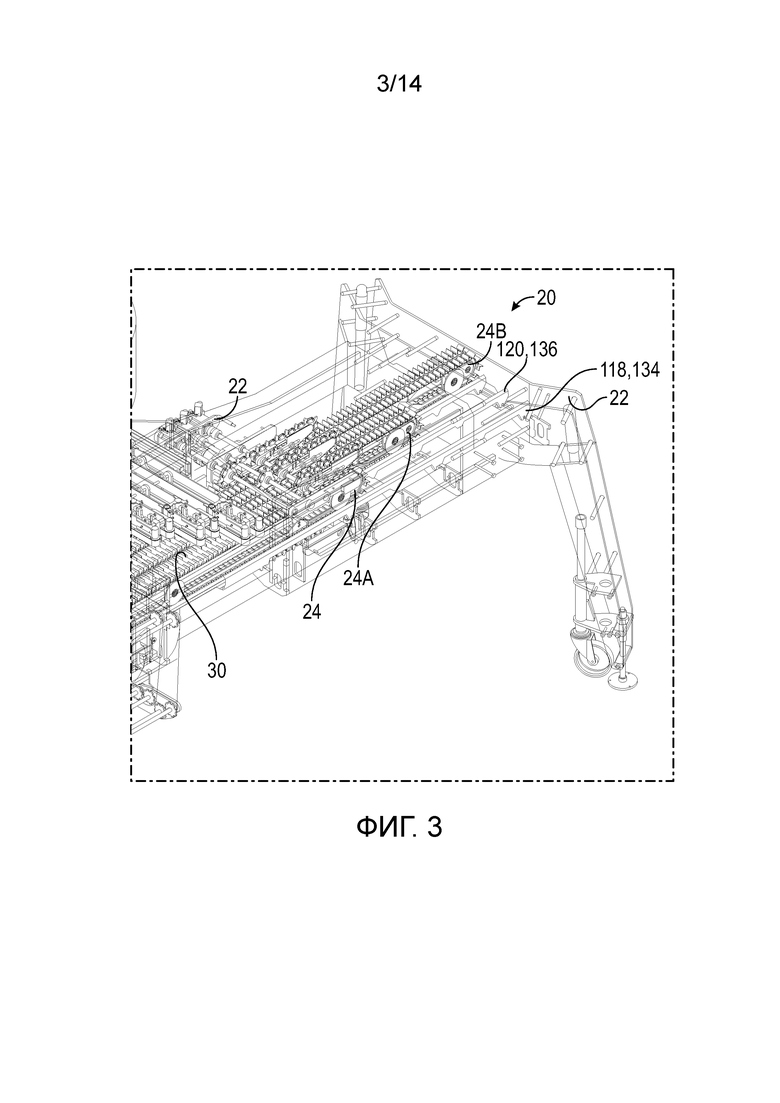
Фиг. 3 - детальный вид в перспективе сверху системы загрузки пищевых изделий по фиг. 1, показывающий корпус в полуразрезе и челночные транспортеры.
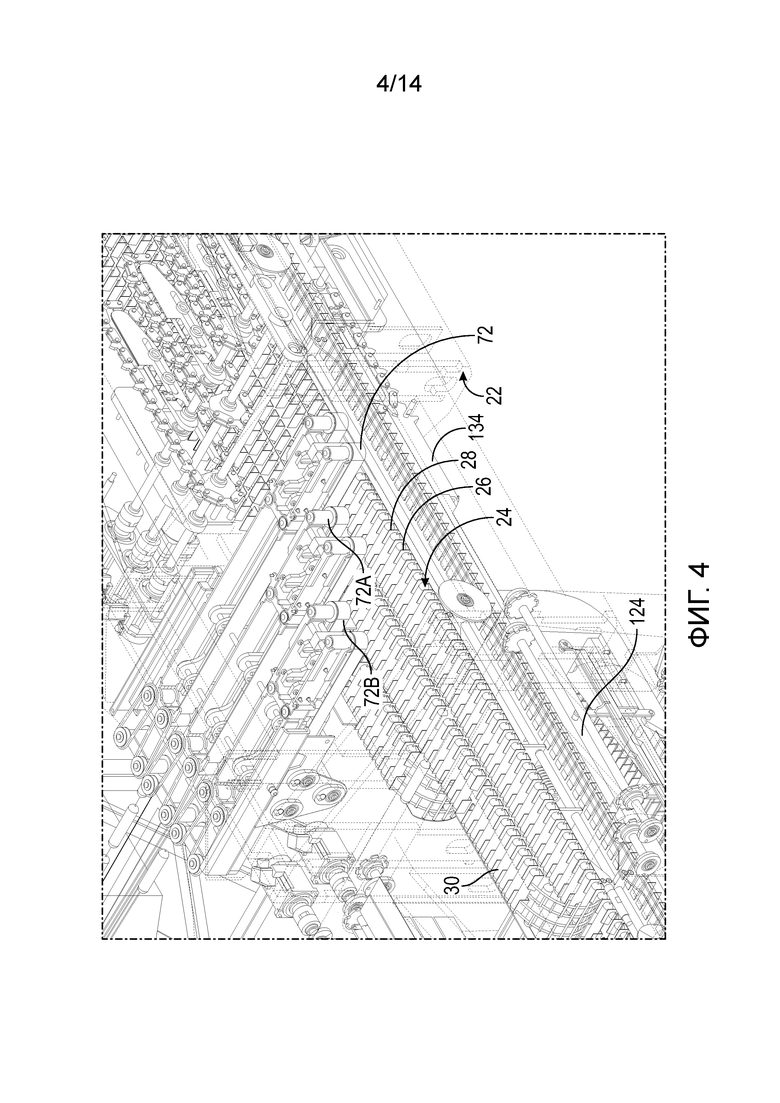
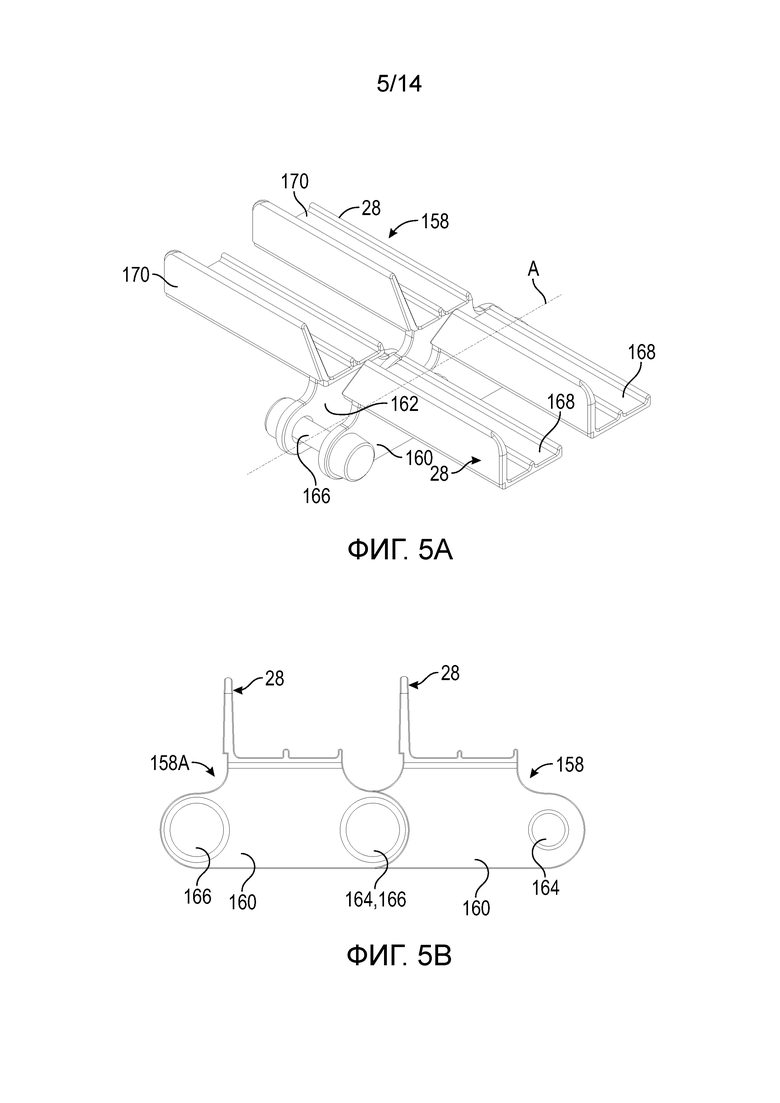
Фиг. 5A, 5B и 5C - соответственно виды в перспективе сверху и снизу, вид сбоку и вид в перспективе спереди пары лопаток, сцепленных друг с другом для образования сегмента челночного транспортера и загрузочной головки системы загрузки пищевых изделий по фиг. 1.
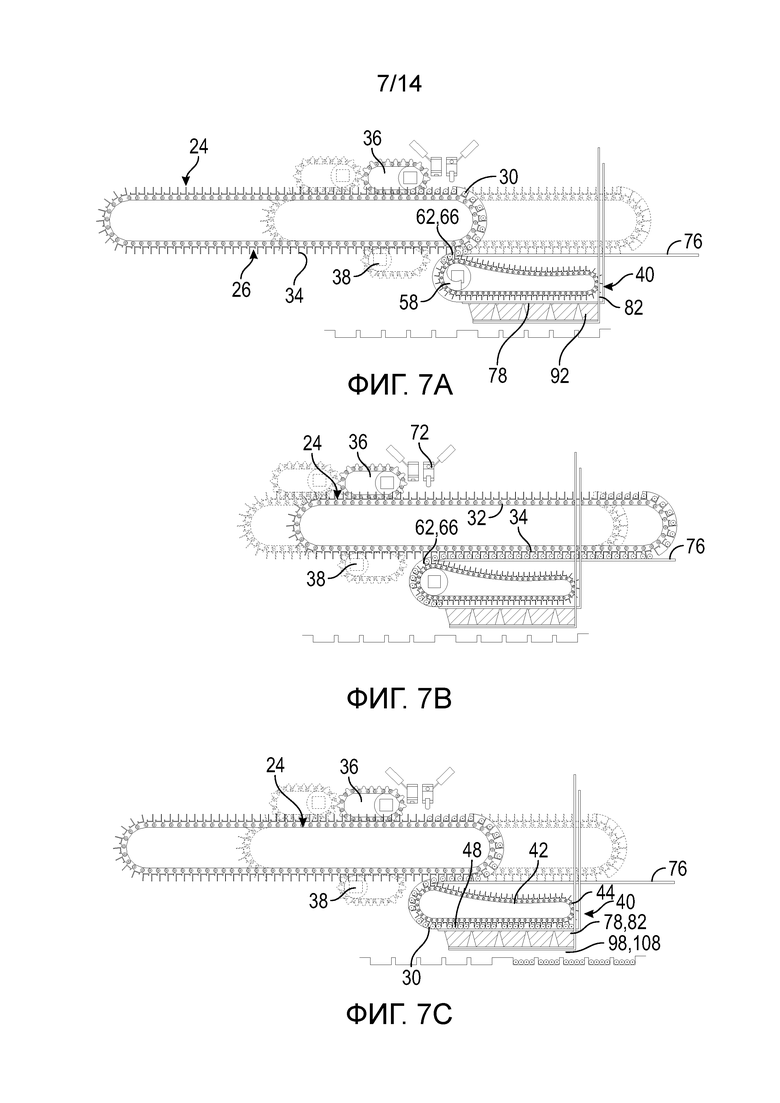
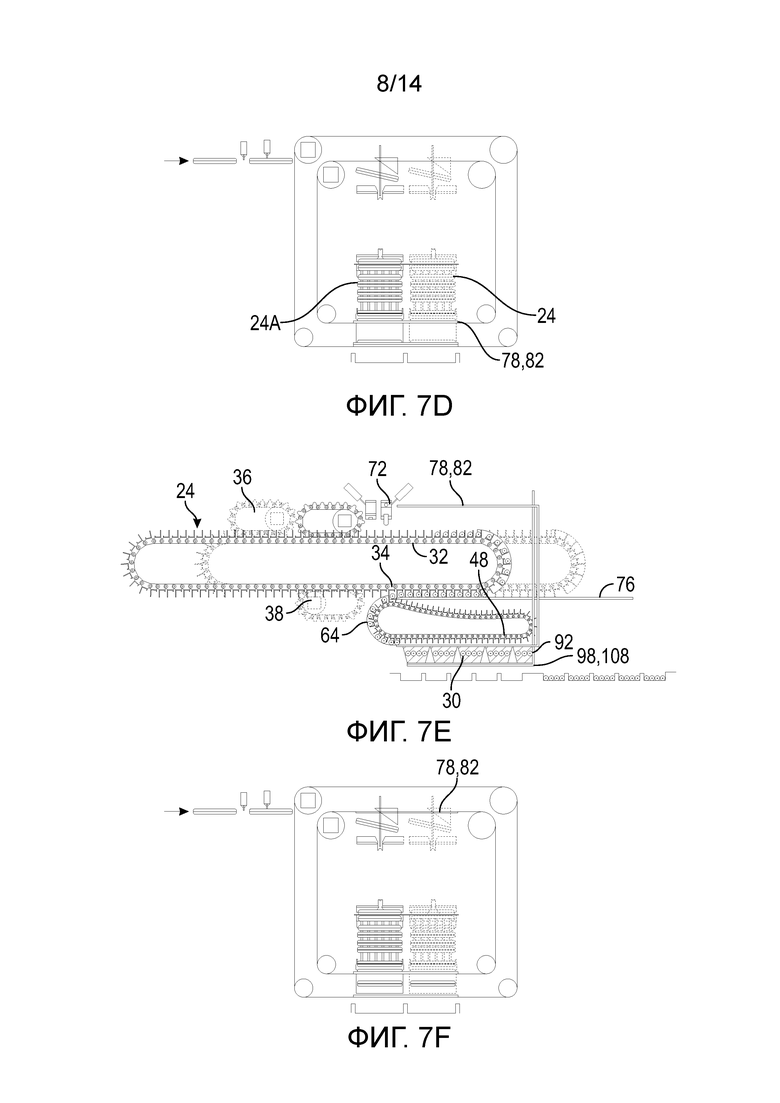
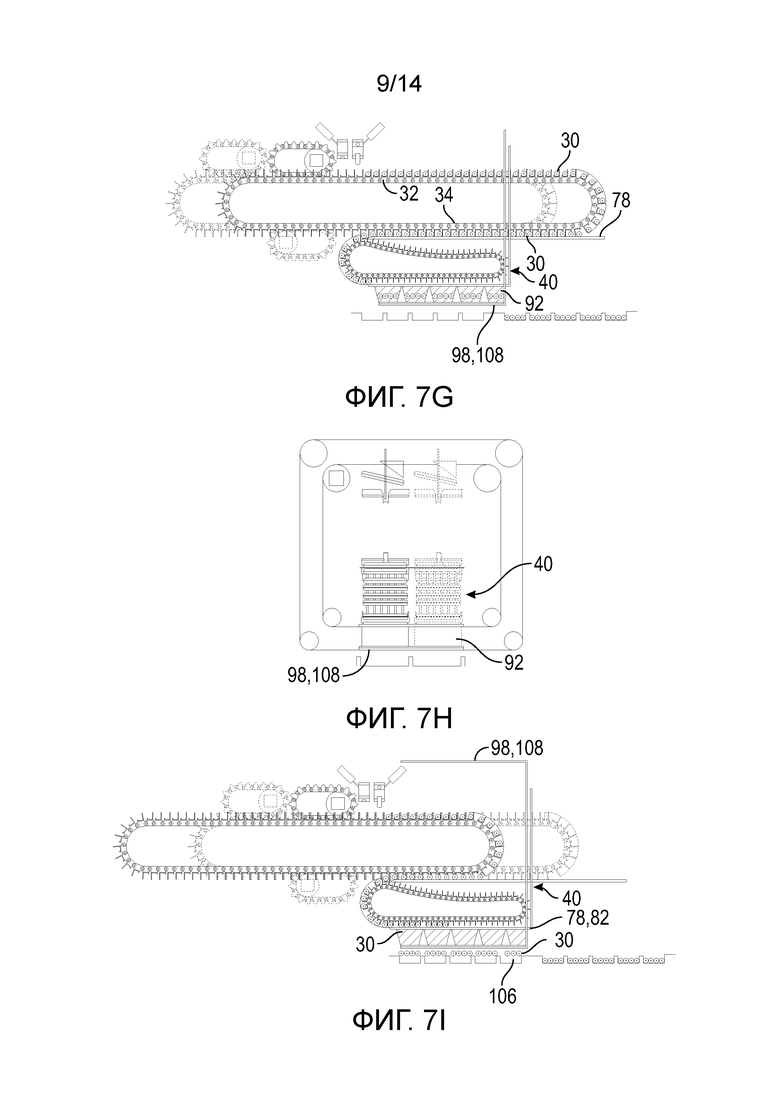
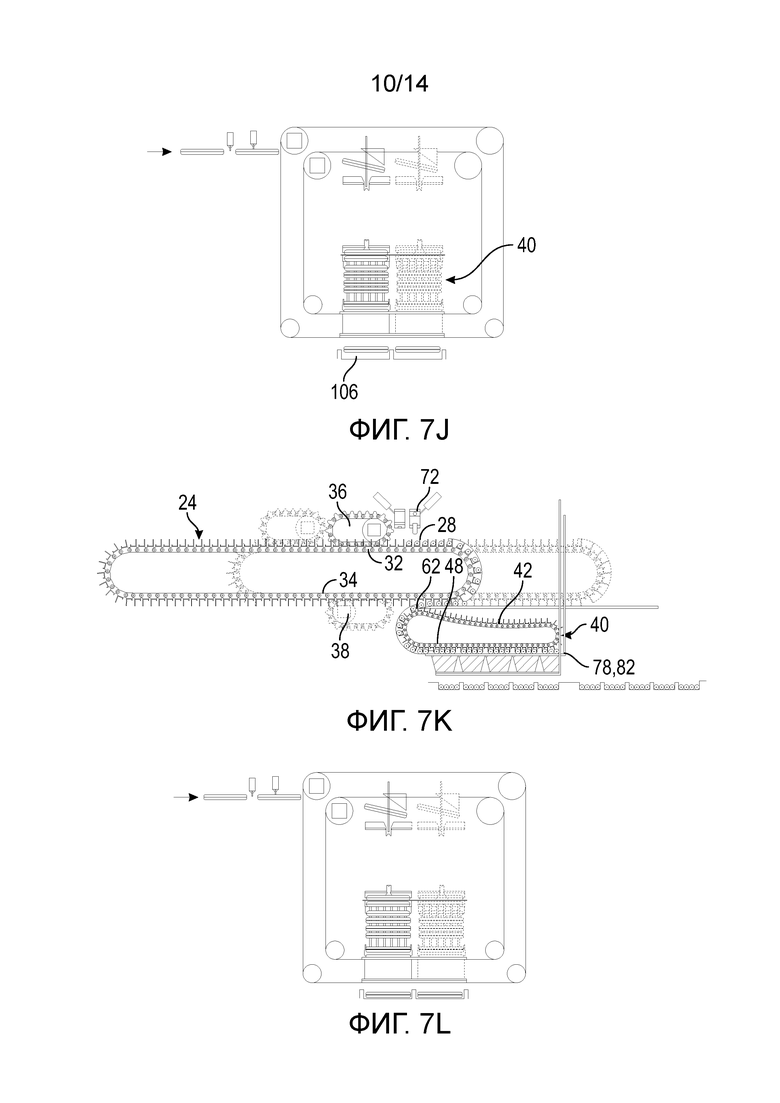
Фиг. 7A, 7B, 7C, 7D, 7E, 7F, 7G, 7H, 7I, 7J, 7K и 7L - схематические виды сбоку челночного транспортера, загрузочной головки, верхнего и нижнего скользящих затворов системы загрузки пищевых изделий по фиг. 1, показывающие один пример последовательности операций.
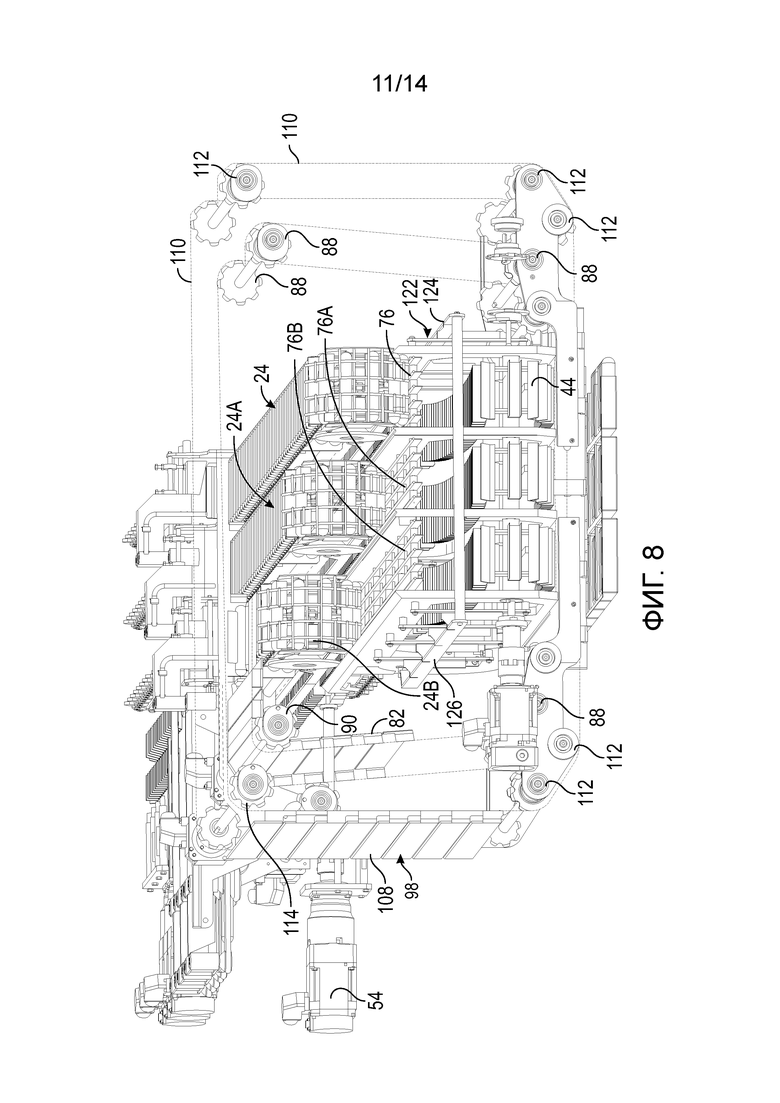
Фиг. 8 - детальный вид в перспективе с конца системы загрузки пищевых изделий по фиг. 1, показанной без корпуса.
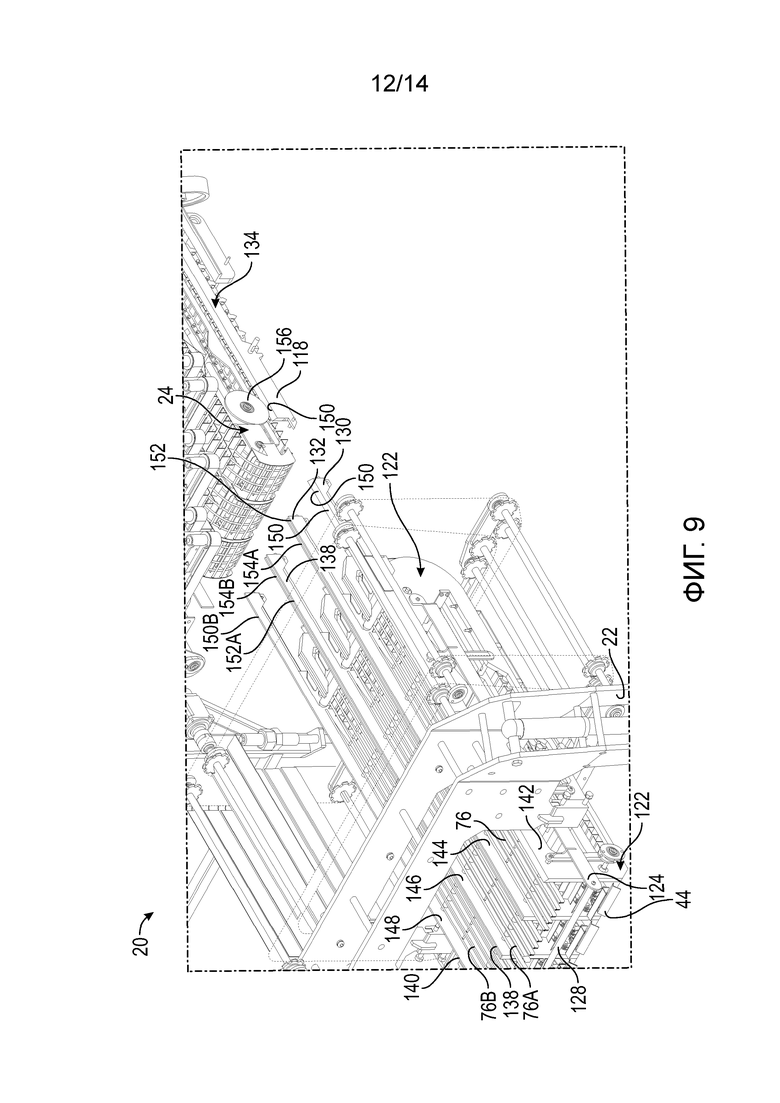
Фиг. 9 - детальный вид в перспективе, иллюстрирующий загрузочную головку, отсоединенную от передней части корпуса системы загрузки пищевых изделий по фиг. 1.
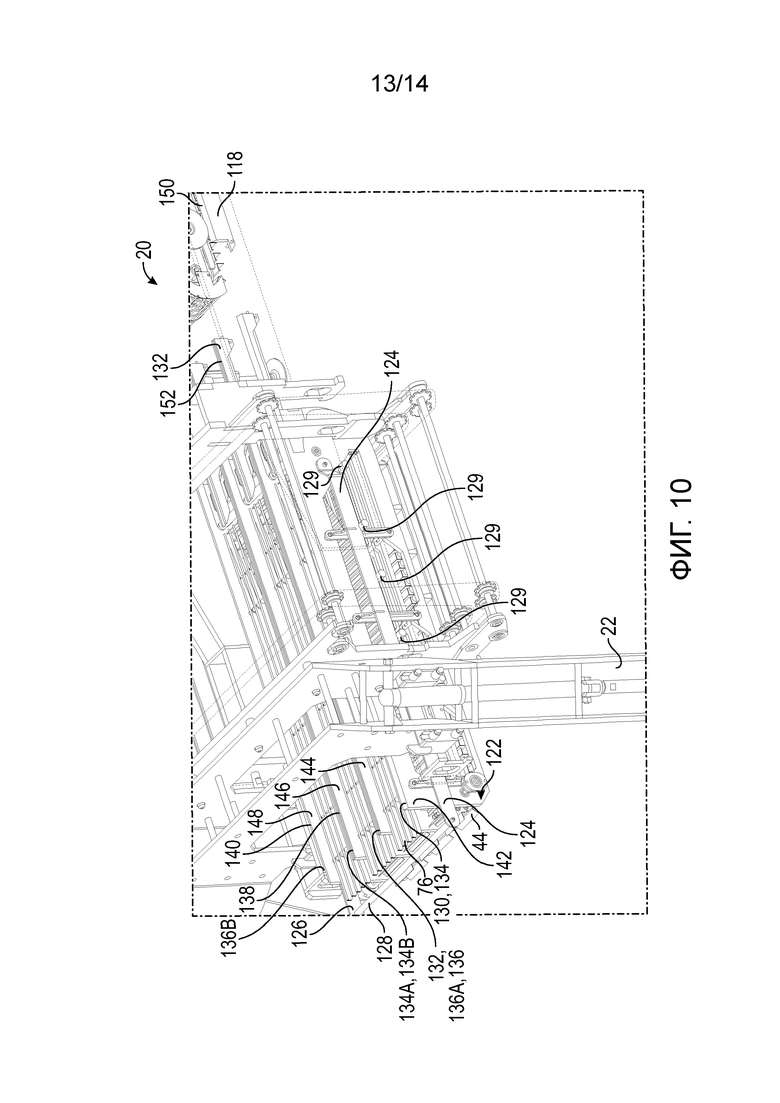
Фиг. 10 - детальный виз в перспективе, иллюстрирующий загрузочную головку, отсоединенную от передней части корпуса и частично снятую с задней части корпуса системы загрузки пищевых изделий по фиг. 1.
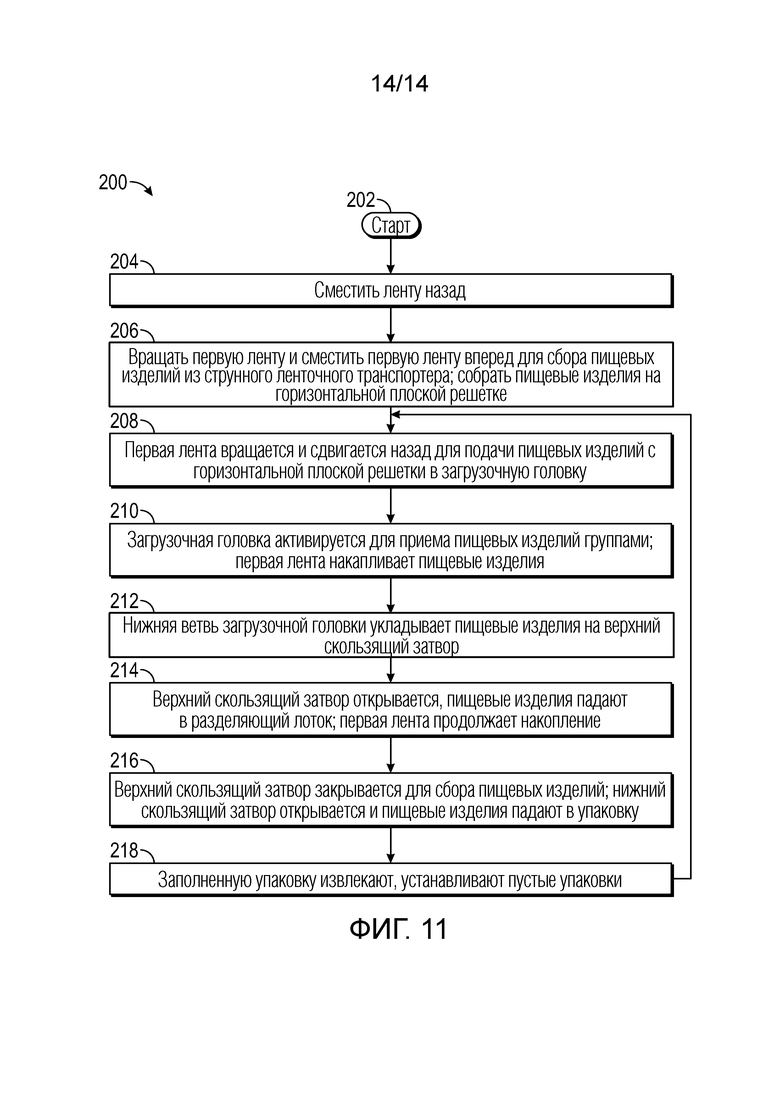
Фиг. 11 - диаграмма последовательности, иллюстрирующая процесс, показанный на фиг. 7A-7L.
Подробное описание
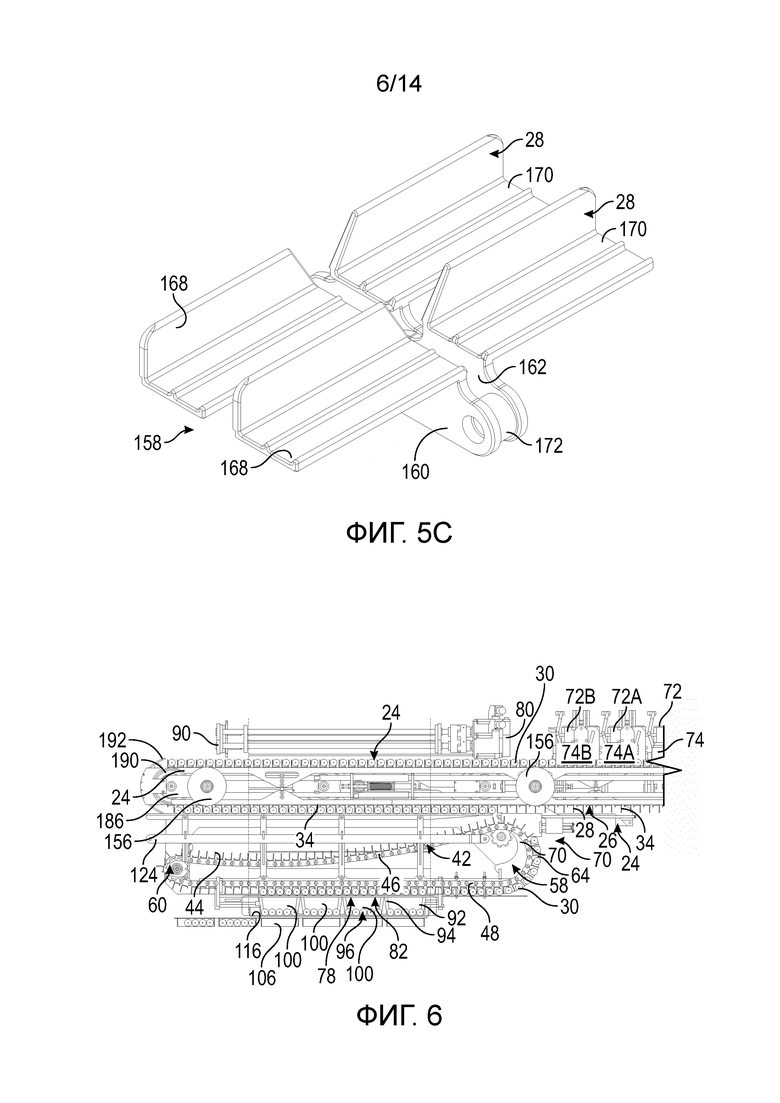
Как показано на фиг. 1, 2, 3 и 4, предлагаемая система загрузки пищевых изделий, в целом показанная позицией 20, содержит корпус 22 и челночный транспортер 24, имеющий первую ленту 26 с множеством лопаток 28 для приема отдельных пищевых изделий 30. Лопатки более подробно показаны на фиг. 5A, 5B, и 5C и описаны ниже. Система 20 загрузки пищевых изделий является масштабируемой и показана на чертежах как имеющая три независимо работающих челночных транспортера 24, 24A и 24B, каждый из которых имеет первую ленту 26 с первым множеством лопаток 28. В объем настоящего изобретения входит система 20 загрузки пищевых изделий, содержащая только один, два или более трех челночных транспортеров 24. Нижеследующее описание будет относиться, в частности, к челночному транспортеру 24, но следует понимать, что описание структуры и функций челночного транспортера 24 в равной степени относится и к челночным транспортерам 24A и 24B.
В одном иллюстративном варианте первая лента 26 является бесконечной лентой, имеющей верхнюю ветвь 32 и нижнюю ветвь 34. Челночный транспортер 24 смонтирован на корпусе 22 для продольного возвратно-поступательного движения относительно корпуса. Верхний привод 36 находится в зацеплении с верхней ветвью 32 челночного транспортера 24, а нижний привод 38 находится в зацеплении с нижней ветвью 34 этого челночного транспортера. Как также показано на фиг. 6, загрузочная головка 40 содержит вторую ленту 42 со вторым множеством лопаток 44 (см. также фиг. 8 и 9), которые принимают пищевые изделия 30 с нижней ветви 34 челночного транспортера 24. В одном иллюстративном варианте вторая лента 42 является бесконечной лентой, имеющей верхнюю ветвь 46 и нижнюю ветвь 48. Как показано на фиг. 2, в вариантах загрузочная головка 40 может быть масштабируемой, и иметь ленты 42A, 42B содержащие одни и те же компоненты и работающие так же, как и лента 42. Соответственно, описание будет ограничено лентой 42, поскольку оно в равной степени относится и к лентам 42A, 42B.
Система 20 содержит управляющее устройство 50, которое в вариантах запрограммировано на активацию верхнего привода 36 и нижнего привода 38 для работы с заранее выбранной скоростью, тем самым заставляя первую ленту 26 вращаться по круговой траектории, а челночный транспортер совершать продольные возвратно-поступательные движения (т.е., влево и вправо на фиг. 1, 2, 3 относительно корпуса 22) для приема и сохранения первого заранее определенного количества пищевых изделий 30 ( см. фиг. 1 и 2) и укладывать второе заранее определенное количество удлиненных пищевых изделий на вторую ленту 46 (см. фиг. 6) с выбранной частотой. Как показано на фиг. 2, управляющее устройство 50 соединено для управления исполнительными механизмами 52, 52A, 52B, которые приводят верхние привода 24, 24A, 24B, соответственно, исполнительным механизмом 54 для привода нижнего привода 38, и исполнительный механизм 56 для управления загрузочной головкой 40. В вариантах исполнительные механизмы 52, 54 и 56 являются электродвигателями, в частности, шаговыми электродвигателями.
В иллюстративных вариантах, как лучше всего показано на фиг. 6, загрузочная головка содержит переднюю направляющую 58 на конце, принимающем пищевые изделия, и заднюю направляющую 60, где передняя направляющая имеет больший радиус кривизны, чем радиус кривизны задней направляющей. Вторая лента 42 загрузочной головки 40 проходит вокруг передней направляющей 58 и задней направляющей 60 так, чтобы соседние лопатки 44 второй ленты раскрывались наружу в точке 62 (см. фиг. 7A), где вторая лента впервые зацепляется с передней направляющей, для приема пищевых изделий 30 из нижней ветви 34 первой ленты 26 челночного транспортера 24.
В вариантах загрузочная головка 40 содержит направляющую 64 скольжения, проходящую вокруг передней направляющей 58 и отстоящую от нее для удержания пищевых изделий 30 в лопатках 44 второй ленты 42, когда лопатки второй ленты проходят между передней направляющей и направляющей скольжения. Верхняя часть направляющей 64 скольжения вместе со второй лентой образует отверстие 66 для приема изделий (см. фиг. 7A). Отверстие 66 для приема пищевых изделий совпадает с точкой 62, в которой вторая лента 42 впервые входит в зацепление с передней направляющей 58 для приема пищевых изделий 30 из нижней ветви 34 первой ленты 26.
В одном иллюстративном варианте задняя направляющая 60 принимает форму ведущей звездочки, а передняя направляющая 58 содержит паразитную звездочку и фиксированные дугообразные направляющие пластины 70. Исполнительный механизм 56 загрузочной головки соединен для вращения ведущей звездочки 60. В вариантах шаг лопаток 28 первой ленты 26 (т.е. расстояние между одной и той же точкой на соседних лопатках) больше, чем шаг лопаток 44 второй ленты 42 загрузочной головки 40. Это увеличенный шаг позволяет первой ленте принимать пищевые изделия 30 от подающего механизма, такого как струнные транспортеры 72, 72A, 72B, которые подают пищевые изделия конец-в-конец к толкателям 74, 74A, 74B. Эти толкатели 74, 74A, 74B наклонены для отклонения пищевых изделий 30 вниз для попадания между лопатками 28 челночных транспортеров 24, 24A, 24B, соответственно.
В вариантах, как показано на фиг. 7A и 8, под нижней ветвью 34 первой ленты 26 расположена горизонтальная плоская решетка 76 (на фиг. 8 также показаны горизонтальные плоские решетки 76A, 76B для челночных транспортеров 24A, 24B, соответственно), которая отнесена от первой ленты для удержания пищевых изделий 30 между лопатками 28 нижней ветви первой ленты. Горизонтальная плоская решетка 76 заканчивается у отверстия 66 для приема пищевых изделий загрузочной головки рядом с направляющей 64 скольжения и образует отверстие 66 для приема пищевых изделий вместе с направляющей скольжения и лопатками 44 второй ленты.
Как показано на фиг. 2, 6 и 8, система 20 загрузки содержит верхний скользящий затвор 78, расположенный под нижней ветвью 48 второй ленты 42 для приема пищевых изделий 30 от загрузочной головки 40. Первый исполнительный механизм, который может быть линейным электродвигателем, активируется управляющим устройством 50 для поочередного открывания верхнего скользящего затвора, чтобы пищевые изделия 30, принятые от загружающей головки 40 и поддерживаемые верхней поверхностью 82 (см. также фиг. 7A) верхнего скользящего затвора, падали вниз, и закрывания верхнего скользящего затвора для приема и накопления других пищевых изделий из нижней ветви второй ленты загрузочной головки.
В одном иллюстративном варианте верхний скользящий затвор 78 содержит множество первых или верхних панелей 84 затвора, прикрепленных и проходящих между параллельными цепными приводам, которые содержат поддерживающие цепи 86, которые проходят вокруг паразитных звездочек 88, огибая часть челночного транспортера 24 и загрузочную головку. Первый исполнительный механизм 80 соединен для вращения верхней ведущей звездочки 90, которая заставляет панели 84 верхнего затвора перемещаться между открытым положением, показанным на фиг. 8, и закрытым положением поддержки пищевого изделия 30, как показано на фиг. 6.
Система 20 загрузки также может содержать разделяющий лоток 92 закрепленный под верхним скользящим затвором 78, для приема пищевых изделий 30 от верхнего скользящего затвора, когда скользящий затвор сдвинут в положение, показанное на фиг. 8. Разделяющий лоток 92 может содержать делители 94 для разделения пищевых изделий, полученных из загрузочной головки 40 и опирающихся на верхнюю поверхность 82 скользящего затвора 78, на заранее определенные группы 96, например, по 5 пищевых изделий, как показано на фиг. 6. Эти заранее определенные группы пищевых изделий 30 определяются расположением и количеством делителей 94 в разделяющем лотке 92. В вариантах разделяющий лоток 92 можно выбрать из множество разделяющих лотков 92, каждый их которых имеет разный интервал между делителями 94. Например, разделяющий лоток 92, показанный на фиг. 6, можно заменить на выбранный разделяющий лоток, имеющий делители, которые организуют принятые пищевые изделия на группы по 3 (для более крупных пищевых изделий) 4, 6 или более. Разделяющий лоток 92 также позволяет принимать пищевые изделия 30 уложенные слоями, например, в 2 или 3 слоя по 5 изделий в каждом слое.
В одном варианте разделяющий лоток 92 имеет открытое дно, и система 20 содержит нижний скользящий затвор 98, расположенный под разделяющим лотком в приемниках 100, определенных делителями 94 и концевыми стенками 102 (см. фиг. 2). Нижний скользящий затвор 98 содержит второй исполнительный механизм 104, активируемый управляющим устройством 50 для поочередного открывания, позволяющего пищевым изделиям 30 в разделяющем лотке 92 упасть вниз в индивидуальные упаковки 106, и закрывания для приема и накопления пищевых изделий, из загрузочной головки 40. В одном иллюстративном варианте нижний скользящий затвор 98 содержит множество вторых или нижних панелей 108 затвора прикрепленных и вокруг паразитных звездочек и проходящих между параллельным цепным приводом, который содержит поддерживающие цепи 110, которые проходят вокруг паразитных звездочек 112 (см. также фиг. 8), охватывая часть челночного транспортера 24 и загрузочную головку 40. Второй исполнительный механизм 114 соединен для вращения верхней ведущей звездочки 114, которая заставляет нижние панели 108 затвора перемещаться между открытым положением, показанным на фиг. 2 и 8, в закрытое положение, в котором они поддерживают пищевые изделия 30, как показано на фиг. 6, и в котором пищевые изделия поддерживаются верхними поверхностями 116 нижних панелей 108 затвора.
В одном иллюстративном варианте верхний скользящий затвор 78 и нижний скользящий затвор 98 ориентированы относительно челночного транспортера 24 и загрузочной головки 40 так, чтобы смещать верхнее и нижнее множества панелей 82, 108, соответственно, вбок относительно направления движения второй ленты 46 загрузочной головки 40. Первый и второй исполнительные механизмы 80, 104, соответственно, соединены с из соответствующим параллельными цепными приводами для перемещения первого и второго множеств панелей 82, 08 между их соответствующими открытым и закрытым положениями.
Как показано на фиг. 3, 4, 8, 9 и 10, корпус 22 содержит пару направленных вперед рельсов 118, 120. На этой паре направленных вперед рельсов 118, 120 подвижно установлен челночный транспортер 24. Загрузочная головка 40 содержит раму 122, которая поддерживает ведущую звездочку 60 (фиг. 6), паразитную звездочку 68 и фиксированные направляющие пластины 70. Рама 122 также поддерживает горизонтальные плоские решетки 76, 76A и 76B, верхний скользящий затвор 78 и нижний скользящий затвор 98. Рама 122 установлена для скольжения на корпусе 22. В вариантах рама 122 содержит боковые рельсы 124, 126, с которыми с возможностью скольжения зацеплены и поддерживаются цилиндрические выступы 129, которые в вариантах могут принимать форму роликов, которые прикреплены к боковым стенкам (не показаны для ясности) корпуса 22 рядом с рамой 122.
В вариантах рама 122 содержит пару направленных назад рельсов 130, 132, которые соединены с возможностью отсоединения с парой направленных вперед рельсов 118 120 (фиг. 3) для образования пары непрерывных челночных рельсов 134, 136 для относительного продольного возвратно-поступательного движения челночного транспортера 24. В показанном варианте рама 122 также содержит направленные назад рельсы 138, 140 для продольного возвратно-поступательного движения челночных транспортеров 24A, 24B. Направленные назад рельсы 130, 132 для второй ленты 42 образуют верхние горизонтальные кромки боковых стенок 142, 144 рамы 122 загрузочной головки 40. Аналогично, направленные назад рельсы 138, 140 образуют верхние горизонтальные кромки боковых стенок 146, 148 рамы 122.
В одном варианте пара направленных вперед рельсов 118, 120 и пара направленных назад рельсов 130, 132 сдержат обращенные наружу скошенные опорные поверхности 150, 152. Каждый из рельсов 132, 138 содержит дополнительную противоположную скошенную несущую поверхность 154A, 154B. Несущие поверхности 152, 154A и 152a, 154B совместно образуют две параллельных скошенных поверхности, которые встречаются для образования V-образных желобов на верхних поверхностях боковых стенок 144, 146. Боковые стенки 148 содержат скошенную несущую поверхность 150B. Челночный транспортер 24 содержат пары дисковидных колес 156 на каждой стороне, которые катятся по скошенным несущим поверхностям 150, 152 и поддерживают челночный транспортер, благодаря чему скошенные несущие поверхности центрируют челночный транспортер между парой направленных вперед рельсов 118, 120 и парой направленных назад рельсов 138, 140. Аналогично, челночный транспортер 24A содержит пару дисковидных колес 156B, которые катятся по несущим поверхностям 154B, 150B. Пары несущих поверхностей 150, 152; 154A, 152A; и 154B, 150B удлиняют челночные рельсы 134, 136 и их аналоги 136A, 134A, 134B, 136B для челночных транспортеров 24A, 24B, соответственно.
Как показано на фиг. 9 и 10, загрузочная головка 40 поддерживается на корпусе 22 рамой 122, в котором боковые рельсы 124 поддерживаются цилиндрическими выступами 129. Загрузочную головку 40 можно снять с системы 20, отсоединив направленные назад рельсы 130, 132 от пары направленных вперед рельсов 118, 120 (фиг. 3), захватив ручку 128 и сдвинув загрузочную головку 40 назад (т.е., влево на фиг. 9 и 10) от корпуса 22, при этом загрузочная головка 40 поддерживается для этого направленного назад скользящего движения зацеплением с боковыми рельсами 124, 126 (фиг. 8) цилиндрическими выступами 129. Загрузочную головку 340 можно заменить таким же способом, задвинув загрузочную головку 40 вперед в корпус 22 и вновь прикрепив направленные назад рельсы 130, 132 к направленным вперед рельсам 118, 120. Аналогично, для показанного варианта направленные назад рельсы 136A, 134A, 134B, 136B для челночных транспортеров 24A, 24B, соответственно, повторно крепятся к их соответствующим направленным вперед сопрягаемым рельсам. Этот признак не только облегчает очистку и ремонт загрузочной головки 40, но и облегчает переналадку системы 20 для использования выбранной загрузочной головки, аналогичной загрузочной головке 40, но имеющей второй транспортер 46 с другим шагом и/или с другой формой или размером лопаток 44.
В одном иллюстративном варианте, как показано на фиг. 5A, 5B и 5C, первая лента 26 является роликовой цепью, имеющей множество лопаточных узлов 158. Каждый лопаточный узел 158 содержит пару противоположных боковых пластин 160, 162, параллельных и расположенных по обе стороны от продольной центральной линии A ленты, и соединенных передним и задним относительно поворотными роликами 164, 166, соответственно. Как показано на фиг. 5B, соседние лопаточные узлы 158, 158A имеют общий соединяющий ролик, поэтому ролик 164, 166, расположенный между лопаточными узлами 158, 158A и соединяющий их, является одновременно задним роликом 166 лопаточного узла 158 и передним роликом 164 лопаточного узла 158A. Каждая боковая пластина 160, 162 имеет лопаточный сегмент 168, 170, соответственно, отходящий вбок от центральной линии A ленты так, что лопаточные сегменты противоположных боковых пластин выровнены, чтобы образовать лопатку 28, которое поддерживает одно из пищевых изделий 30. В одном иллюстративном варианте первая лента 26 является бесконечной лентой, состоящей из соединенных друг с другом лопаточных узлов 158. При необходимости, ролики 164, 166 могут содержать втулки 172, которые удерживают боковые пластины 160, 162 на заранее определенном расстоянии друг от друга.
Как показано на фиг. 1, 2 и 3, верхний привод 36 и нижний привод 38 находятся в зацеплении с роликами 164, 166 вдоль центральной линии A первой ленты между боковыми пластинами 160, 162 лопаточного узла 158 (см. фиг. 5A-5C). И верхний привод 36, и нижний привод 38 содержат ведомую зубчатую цепь 174, 176, соответственно, имеющую выступающие наружу зубья 178, которые входят в зацепление с роликами 164, 166 и/или втулками 172 роликовой цепи между выровненными лопаточными сегментами 168, 170. Зубчатые цепи 174, 176 проходят вокруг зубчатых пластин 178, 180 и взаимодействуют с ведущими звездочками 182, 184, приводимыми в действие исполнительными механизмами 52 (и 52A, 52B для верхних приводов 36A, 36B, соответственно) и 54 (см. также фиг. 8) для нижнего привода 38, все из которых установлены на корпусе 22. В одном иллюстративном варианте и как показано на фиг. 1 и 6, челночный транспортер 24 содержит челночную раму 186, проходящую между передним и задним паразитными шкивами 188, 190, и первая лента 26 проходит вокруг этих переднего и заднего паразитных шкивов. На челночной раме 186 установлена челночная решетка 192, которой придан изогнутый контур для соответствия кривизне первой ленты 26, где она проходит вокруг заднего паразитного шкива 190, для удержания пищевых изделий 30 на участке первой ленты, проходящем вокруг заднего шкива. На челночной раме 186 с возможностью вращения установлены дисковидные колеса 156.
В одном иллюстративном варианте, управляющее устройство 50 (фиг. 2) запрограммировано на активацию верхнего привода 36, а в других вариантах, верхних приводов 36A и/или 36B для вращения и на удерживание нижнего привода 38 неподвижным, чтобы одновременно сместить челночный транспортер 24 в первом продольном направлении относительно корпуса 22, и на вращение первой ленты 26 для сбора пищевых изделий 30 на верхней ветви 32 первой ленты и транспортировки пищевых изделий с верхней ветки на нижнюю ветвь 34 первой ленты. Управляющее устройство 50 также может быть запрограммировано на активацию верхнего привода 36 и нижнего привода 38 для вращения в том же направлении для продольного смещения первой ленты 24 во втором, противоположном направлении для транспортировки пищевых изделий 30 на нижней ветви 34 первой ленты на вторую ленту 42 загрузочной головки 40.
Подводя итоги в одном варианте системы 20 загрузки пищевых изделий накопитель, который в вариантах может принимать форму челночного транспортера 24, принимает и накапливает отдельные пищевые изделия и выгружает пищевые изделия. Загрузочная головка 40 содержит вторую ленту 42 с множеством лопаток 44 для приема пищевых изделий 30 из накопителя. Эта лента имеет верхнюю ветвь 46 и нижнюю ветвь 47. Загрузочная головка имеет переднюю направляющую 58 на принимающем пищевые изделия конце, и заднюю направляющую 60. Передняя направляющая 58 имеет больший радиус кривизны, чем радиус кривизны задней направляющей. Вторая лента 42 загрузочной головки 40 проходит вокруг передней направляющей 58 и задней направляющей 60 так, что интервал между соседними лопатками 44 второй ленты 42 расширяется наружу в точке 62, где вторая лента впервые входит в зацепление с передней направляющей для приема пищевых изделий 30, выгружаемых из накопителя. Управляющее устройство 50 соединено для активирования каждого из накопителя 24 и ленты загрузочной головки для работы с выбранной скоростью, тем самым заставляя накопитель 24 принимать и удерживать заранее выбранное количество пищевых изделий 30 в течение заранее определенного временного интервала (см., напр., фиг. 1) и укладывать второе заранее определенное количество пищевых изделий на вторую ленту (см. напр., фиг. 6, пищевые изделия на верхней поверхности 86 верхнего скользящего затвора) с заданной частотой так, чтобы загрузочная головка принимала пищевые изделия между лопатками второй ленты заранее определенными разнесенными друг от друга группами.
Верхний скользящий затвор 78 может быть расположен так, чтобы принимать пищевые изделия 30 с нижней стороны нижней ветви 48 второй ленты 42. Верхний скользящий затвор 78 содержит исполнительный механизм 80, активируемый управляющим устройством 50 для поочередного открывания, чтобы дать возможность пищевым изделиям 30, принятым из загрузочной головки 40 заранее определенными разнесенными друг от друга группами, упасть вниз, и закрывания для приема и накопления пищевых изделий из загрузочной головки заранее определенными разнесенными друг от друга группами. Нижний скользящий затвор 98 расположен под верхним скользящим затвором 78 для приема пищевых изделий 30 с верхнего скользящего затвора заранее определенными разнесенными друг от друга группами, когда он открыт, при этом нижний скользящий затвор содержит исполнительный механизм 104, активируемый управляющим устройством 50 для поочередного открывания, чтобы дать возможность пищевым изделиям, принятым из верхнего скользящего затвора упасть вниз заранее определенными разнесенными друг от друга группами в индивидуальные приемники 100, соответствующие заранее определенным разнесенным друг от друга группам, и закрывания для приема и накопления пищевых изделий 30 из загрузочной головки 40.
В иллюстративном варианте способ загрузки пищевых изделий в приемники начинается с приема и накопления пищевых изделий 30 в накопителе, например, в челночном транспортере 14 и/или челночных транспортерах 24A, 24B. Пищевые изделия 30 выгружаются из накопителя заранее определенными разнесенными друг от друга группами в загрузочную головку 40. Пищевые изделия 30 принимаются последовательно заранее выбранными группами из аккумулятора на принимающем конце или отверстии 66 между лопатками 44 бесконечной ленты 42 загрузочной головки 40, проходящей вокруг первой направляющей 58 и задней направляющей 60. Передняя направляющая 58 имеет больший радиус кривизны, чем радиус кривизны задней направляющей 60, а интервал между соседними лопатками 44 бесконечной ленты 42 расширяется наружу в точке 62, в которой бесконечная лента впервые встречается с передней направляющей для определения приемного отверстия 66 для приема пищевых изделий, выгружаемых из накопителя 24.
Пищевые изделия 30 транспортируются заранее выбранными группами на второй ленте 42 на нижнюю ветвь этой ленты до верхнего скользящего затвора 78. Управляющее устройство 50 синхронизирует движение второй ленты 42 с движением накопителя или первой ленты 24 для разнесения пищевых изделий заранее выбранными группами на вернем скользящем затворе 78. Управляющее устройство 50 открывает верхний скользящий затвор, чтобы первый заранее выбранный набор групп пищевых изделий 30 упал в разделяющий лоток 92, который поддерживает заранее выбранные группы пищевых изделий 30 на нижнем скользящем затворе 98. Управляющее устройство 50 открывает нижний скользящий затвор 98, чтобы первый заранее выбранный набор групп пищевых изделий 30 упал в дискретные упаковки 106.
В вариантах, прием и накопление пищевых изделий 30 в аккумуляторе включает прием пищевых изделий последовательно между разнесенными лопатками 28 на верхней ветви 32 первой ленты 24 челночного транспортере 24, одновременно смещая челночный транспортер в продольном направлении и вращая первую ленту для транспортировки пищевых изделий на нижнюю ветвь 34 первой ленты. Также в вариантах способ далее содержит этап, на котором затем открывают верхний скользящий затвор 78, позволяя второму заранее выбранному набору групп пищевых изделий 30 упасть на разделяющий лоток 92 поверх первой заранее выбранной группы пищевых изделий; и открывают нижний скользящий затвор 98, позволяя первой и второй заранее выбранным наборам групп пищевых изделий упасть в дискретные упаковки 106.
В другом иллюстративном варианте, показанном на фиг. 7A-7L и представленном на диаграмме 200 последовательности на фиг. 11, процесс начинается как показано на фиг. 7A и в блоке 202, 204, когда управляющее устройство 50 активирует верхний привод 36 для вращения по часовой стрелке, и нижний привод 38 для вращения против часовой стрелки, тем самым смещая первую ленту 26 назад (влево на фиг. 7A). Затем активируют верхний привод 38 для вращения против часовой стрелки, а нижний привод 38 остается неподвижным, поэтому первая лента 26 одновременно вращается по часовой стрелке и смещается вперед (вправо на фиг. 7B) со скоростью, позволяющей принять пищевые изделия 30 со струнного ленточного транспортера 72 между индивидуальными лопатками 28. Это приводит к сбору пищевых изделий вдоль длины горизонтальной плоской решетки 76 через приемное отверстие 66, как указано в блоке 206.
Как показано на фиг. 7C и 7D, и в блоках 208, 210 и 212, управляющее устройство 50 активирует верхний скользящий затвор 78, переводя его в открытую конфигурацию, сто позволяет пищевым изделиям 30, ранее уложенным на него, упасть вниз в разделяющий лоток 92. Это выполняется в то время, как последующие группы пищевых изделий удерживаются на второй ленте скользящим затвором 64. В то же время, челночный транспортер 24 принимает пищевые изделия 30 со струнных ленточных транспортеров 72 на свою верхнюю ветвь 32, верхний и нижний привода 36, 38 активируются для одновременного вращения и смещения первой ленты 24 для сбора пищевых изделий 30 на верхней ветви 32 и укладки их на горизонтальной плоской решетке 76.
Как показано на фиг. 7G и 7H, управляющее устройство 50 активирует верхний и нижний приводы 36, 38 для продолжения приема пищевых изделий 30 на верхнюю ветвь 32 первой ленты 32 и размещения пищевых изделий 30 на горизонтальной плоской решетке 78, тогда как пищевые изделия, ранее собранные на панелях 82 верхнего скользящего затвора, продолжают падать в разделяющий лоток 92, где они лежат на панелях 108 нижнего скользящего затвора 98. Как показано на фиг. 7I и 7J и показано в блоке 216, управляющее устройство далее активирует нижний скользящий затвор 98 для перемещения панелей 108 в открытую конфигурацию, что позволяет пищевым изделиям 30, разбитых на группы разделяющим лотком, падать в упаковки 106, которые могут извлекаться и герметизироваться для отгрузки, как показано в блоке 218. Одновременно, верхний скользящий затвор 78 переводится управляющим устройством 50 в закрытое положение, что позволяет управляющему устройству активировать загрузочную головку 40 для укладки пищевых изделий 30 на панели 82 заранее выбранными группами.
Как показано на фиг. 5K и 5L, процесс продолжается, как также показано на фиг. 7C и 7D и описано в блоке 208, когда первый транспортер 24 принимает пищевые изделия 30 на верхнюю ветвь 32 от струнного ленточного транспортера 72 и транспортирует их на нижнюю ветвь 34, где они размещаются на горизонтальной плоской решетке 76. Как показано на фиг. 7A-7L, управляющее устройство 50 активирует верхний и нижний приводы 36, 38 для одновременного вращения первой ленты 36 и смещения ее для непрерывного подвода лопаток 28 для приема пищевых изделий с струнного транспортера 72, которые поступают с него непрерывным потоком.
Вышеприведенное описание работы системы 20 со ссылками на фиг. 7A-7L ограничено одной конфигурацией челночного транспортера 24, верхнего и нижнего приводов 32, 34 и загрузочной головки 40. Следует понимать, что система 20 является масштабируемой и что управляющее устройство 50 можно запрограммировать на активацию двух, трех или более наборов этих компонентов, размещенных близко друг к другу, как показано на фиг. 1-4, например, в отношении челночных транспортеров 21, 24A, 24B.
Описанные устройство и способ представляют собой эффективную загрузочную систему, способную обеспечивать относительно высокую скорость входного потока, занимать относительно небольшую площадь, и относительно легко переналаживаться для обработки упаковок пищевых изделий разных размеров и конфигураций. Описанные система и способ являются лишь одним вариантом изобретения. Следует понимать, что изобретение не ограничивается этими конкретными системами и способами и в них могут быть внесены изменения, не выходящие за пределы объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОДАЧИ БРЕВЕН, УСТРОЙСТВО ОБРАБОТКИ БРЕВЕН, СНАБЖЕННОЕ УСТРОЙСТВОМ ПОДАЧИ БРЕВЕН, И СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ПОДАЧИ БРЕВЕН | 2019 |
|
RU2773918C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПАКОВКИ МАТЕРИАЛА В УПАКОВОЧНЫЙ КОНТЕЙНЕР | 2008 |
|
RU2456219C2 |
| СПОСОБ И УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ШИН ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2595668C2 |
| ХРАНИЛИЩЕ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ПРОДУКТОВ | 1991 |
|
RU2100921C1 |
| УСТАНОВКА ВИХРЕВОГО РАЗМОЛА СМЕШАННОГО ЯДЕРНОГО ТОПЛИВА | 2018 |
|
RU2670979C9 |
| Автоматическая линия для изготовления строительных изделий | 1976 |
|
SU722768A1 |
| Автоматическая линия для изготовления строительных изделий | 1979 |
|
SU893555A2 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ПОДОГРЕВА, ПЛАВЛЕНИЯ, РАФИНИРОВАНИЯ И РАЗЛИВКИ СТАЛИ И СПОСОБ НЕПРЕРЫВНОГО ПОДОГРЕВА, ПЛАВЛЕНИЯ, РАФИНИРОВАНИЯ И РАЗЛИВКИ СТАЛИ | 2000 |
|
RU2224027C2 |
| СИСТЕМА ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ | 2009 |
|
RU2499756C2 |
| ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ УСТРОЙСТВА МАГНИТНОЙ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ | 1995 |
|
RU2155390C2 |
Изобретение относится к системам и способам загрузки пищевых изделий в приемники. Система загрузки пищевых изделий содержит челночный транспортер, имеющий две лопаточные ленты для приема пищевых изделий; два привода; загрузочную головку; скользящий затвор для приема групп пищевых изделий из загрузочной головки; управляющее устройство для независимой активации приводов для работы с выбранными скоростями, для обеспечения вращения первой ленты и для возвратно-поступательных перемещений челночного транспортера для приема и удержания первого заранее определенного количества пищевых изделий, укладки второго заранее определенного количества удлиненных пищевых изделий на вторую ленту с выбранной частотой и выборочного открывания скользящего затвора, позволяя группам пищевых изделий упасть в приемники. Изобретение обеспечивает большой и непрерывный входной поток загрузочной системы, которая легко перенастраивается и работает на минимальной площади цеха упаковки. 2 н. и 19 з.п. ф-лы, 24 ил.
1. Система загрузки пищевых изделий, содержащая:
корпус (22);
челночный транспортер (24, 24A, 24B), имеющий первую ленту (26) с первым множеством лопаток (28) для приема отдельных удлиненных пищевых изделий (30), при этом первая лента (26) имеет верхнюю ветвь (32) и нижнюю ветвь (34), при этом челночный транспортер (24, 24A, 24B) установлен на корпусе (22) для относительных продольных возвратно-поступательных движений;
верхний привод (36), находящийся в зацеплении с верхней ветвью (32) челночного транспортера (24, 24A, 24B);
нижний привод (38), находящийся в зацеплении с нижней ветвью челночного транспортера (24, 24A, 24B);
загрузочную головку (40), имеющую вторую ленту (42) со вторым множеством лопаток (44) для приема пищевых изделий (30) с нижней ветви челночного транспортера (24, 24A, 24B), при этом вторая лента (42) имеет верхнюю ветвь и нижнюю ветвь (48); и
управляющее устройство (50) для активации каждого из верхнего привода (36) и нижнего привода (38) для приведения в действие с выбранной скоростью, тем самым заставляя первую ленту (26) вращаться по круговой траектории, а челночный транспортер (24, 24A, 24B) совершать возвратно-поступательные движения для приема и удержания первого заранее определенного количества пищевых изделий (30) и укладки второго заранее определенного количества удлиненных пищевых изделий (30) на вторую ленту (42) с выбранной частотой;
причем загрузочная головка (40) содержит переднюю направляющую (58) на принимающем пищевые изделия конце (66), и заднюю направляющую (60), при этом передняя направляющая (58) имеет больший радиус кривизны, чем радиус кривизны задней направляющей (60), и вторая лента (42) загрузочной головки (40) проходит вокруг передней направляющей (58) и задней направляющей (60) так, что интервал между соседними лопатками (44) второй ленты (42) расширяется наружу в точке, где вторая лента (42) впервые входит в зацепление с передней направляющей (58) для приема пищевых изделий (30) с нижней ветви (34) первой ленты (26) челночного транспортера (24, 24A, 24B).
2. Система по п. 1, в которой загрузочная головка (40) содержит направляющую (64) скольжения, проходящую вокруг передней направляющей (58) и отнесенную от нее для удержания пищевых изделий (30) между лопатками (44) второй ленты (42), когда лопатки (44) второй ленты (42) проходят между передней направляющей (58) и направляющей (64) скольжения, при этом верхняя часть направляющей (64) скольжения образует вместе со второй лентой (42) отверстие (66) для приема пищевых изделий.
3. Система по п. 2, в которой задняя направляющая (60) является ведущей звездочкой, и передняя направляющая (58) содержит паразитную звездочку и фиксированные пластины (70); и система далее содержит исполнительный механизм (56) загрузочной головки, соединенный для вращения ведущей звездочки.
4. Система по п. 3, в которой шаг лопаток (28) первой ленты (26) больше, чем шаг лопаток (44) второй ленты (42) загрузочной головки (40).
5. Система по п. 4, далее содержащая горизонтальную плоскую решетку (76), расположенную под нижней ветвью (34) первой ленты (26) и отнесенную от нее для приема пищевых изделий (30), находящихся между лопатками (28) нижней ветви (34) первой ленты (26), при этом горизонтальная плоская решетка (76) заканчивается на принимающем пищевые изделия конце (66) загрузочной головки (40) рядом с направляющей (64) скольжения и вместе с направляющей (64) скольжения и лопатками (44) второй ленты (42) образует отверстие (66), принимающее пищевые изделия.
6. Система по п. 5, далее содержащая верхний скользящий затвор (78), расположенный под нижней ветвью (48) второй ленты (42) для приема пищевых изделий (30) из загрузочной головки (40); и первый исполнительный механизм (80), приводимый в действие управляющим устройством (50) для поочередного открывания верхнего скользящего затвора (78), чтобы позволить пищевым изделиям (30), принятым из загрузочной головки и поддерживаемым на верхней поверхности (82) верхнего скользящего затвора (78), упасть вниз, и закрывания верхнего скользящего затвора (78) для приема и сбора дополнительных пищевых изделий (30) с нижней ветви (48) второй ленты (42) загрузочной головки (40).
7. Система по п. 6, далее содержащая разделяющий лоток (92), закрепленный под верхним скользящим затвором (78) для приема пищевых изделий (30) с верхнего скользящего затвора (78) и содержащий делители для разделения принятых пищевых изделий (30) на заранее определенные группы; нижний скользящий затвор (98), расположенный под разделяющим лотком (92); и второй исполнительный механизм (104), приводимый в действие управляющим устройством (50) для поочередного открывания, чтобы позволить пищевым изделиям (30) в разделительном лотке (92) упасть вниз в индивидуальные приемники (106), и закрывания для приема и сбора пищевых изделий (30) из загрузочной головки (40).
8. Система по п. 7, в которой верхний скользящий затвор (78) и нижний скользящий затвор (98) содержат первое и второе множество панелей (82, 108), приходящих между первым и вторым цепными приводами, соединенными для смещения этих множеств панелей (82, 108) вбок относительно направления движения второй ленты (42) загрузочной головки (40); и первый и второй исполнительные механизмы (80, 104), соединенные для перемещения параллельных цепных приводов для перемещения первого и второго множества панелей (82, 104) между их соответствующими открытым и закрытым положениями.
9. Система по п. 8, в которой корпус (22) содержит пару направленных вперед рельсов (118, 120) и челночный транспортер (24, 24A, 24B) подвижно установлен на этой паре направленных вперед рельсов (118, 120).
10. Система по п. 9, в которой загрузочная головка (40) содержит раму (122), которая поддерживает ведущую звездочку (60), паразитную звездочку (68) и фиксированные направляющие пластины (70); и в которой рама поддерживается для скольжения по корпусу (22).
11. Система по п. 10, в которой рама (122) содержит пару направленных назад рельсов (130, 132), соединенных с парой направленных вперед рельсов (118, 120) для образования пары непрерывных челночных рельсов для относительного продольного возвратно-поступательного движения челночного транспортера (24, 24A, 24B).
12. Система по п. 11, в которой горизонтальная плоская решетка (76), верхний скользящий затвор (78) и нижний скользящий затвор (98) прикреплены к раме (122).
13. Система по п. 12, в которой и пара направленных вперед рельсов (118, 120), и пара направленных назад рельсов (130, 132) содержат обращенные наружу скошенные несущие поверхности (150, 152); и челночный транспортер (24, 24A, 24B) содержит дисковидные колеса (156), катящиеся по этим скошенным несущим поверхностям (150, 152) и поддерживающие челночный транспортер (24, 24A, 24B), благодаря чему скошенные несущие поверхности (150, 152) центрируют челночный транспортер (24, 24A, 24B) между парой направленных вперед рельсов (118, 120) и парой направленных назад рельсов (130, 132).
14. Система по п. 13, в которой первая лента (26) является роликовой цепью, имеющей множество лопаточных узлов (158), при этом каждый лопаточный узел (158) содержит пару противоположных боковых пластин (160, 162), параллельных продольной центральной линии (A) ленты и расположенных по обе стороны от нее, и соединенных передним и задним относительно вращающимися роликами (164, 166), при этом каждая боковая пластина (160, 162) имеет лопаточный сегмент (168, 170), отходящий вбок от продольной центральной линии (A) ленты так, чтобы лопаточные сегменты противоположных боковых пластин (160, 162) выравнивались для формирования лопатки, которая поддерживает одно из пищевых изделий (30); и в которой первая лента (26) является бесконечной лентой, состоящей из соединенных друг с другом лопаточных узлов (158).
15. Система по п. 14, в которой и верхний привод (36), и нижний привод (38) находятся в зацеплении с роликами (164, 166) вдоль продольной центральной линии (A) ленты между боковыми пластинами (160, 162) лопаток.
16. Система по п. 15, в которой и верхний привод (36), и нижний привод (38) содержат бесконечную ведомую зубчатую цепь (174, 176), имеющую выступающие наружу зубья (178), входящие в зацепление с роликами (164, 166) роликовой цепи между выровненными лопаточными сегментами (168, 170).
17. Система по п. 16, в которой челночный транспортер (24, 24A, 24B) содержит челночную раму (186), проходящую между первым и вторым паразитными шкивами (188, 190) так, чтобы первая лента (26) проходила вокруг первого и второго паразитных шкивов (188, 190), челночную решетку (192), установленную на челночной раме (186) и имеющую форму, соответствующую кривизне первой ленты (26) вокруг заднего шкива (190), для удержания пищевых изделий (30) на участке первой ленты (26), проходящем вокруг заднего шкива (190); и в которой колеса (156) установлены с возможностью вращения на челночной раме (186).
18. Система по п. 1, в которой управляющее устройство (50) запрограммировано на активацию верхнего привода (36) для вращения и на удержание нижнего привода (38) неподвижным, для одновременного смещения челночного транспортера (24, 24A, 24B) продольно в первом направлении относительно корпуса (22) и вращения первой ленты (26) для подбора пищевых изделий (30) на верхнюю ветвь (32) первой ленты (26) и транспортировки их с верхней ветви (32) на нижнюю ветвь (34) первой ленты (26); и/или запрограммировано на активацию верхнего привода (36) и нижнего привода (38) для вращения в одном направлении для смещения первой ленты (26) продольно во втором направлении для транспортировки пищевых изделий (30) с нижней ветви (34) первой ленты (26) на вторую ленту (42) загрузочной головки (40).
19. Способ загрузки пищевых изделий в приемники, содержащий этапы, на которых:
принимают и накапливают пищевые изделия (30) в накопитель (24, 24A, 24B);
выгружают пищевые изделия (30) из накопителя (24, 24A, 24B) заранее определенными разнесенными друг от друга группами в загрузочную головку (40);
принимают пищевые изделия (30) последовательно заранее выбранными группами из накопителя (24, 24A, 24B) на принимающем пищевые изделия конце (65) между лопатками (44) бесконечной ленты (42) загрузочной головки (40), проходящей вокруг передней направляющей (58) и задней направляющей (60), при этом передняя направляющая (58) имеет больший радиус кривизны, чем радиус кривизны задней направляющей (60), и расстояние между соседними лопатками (44) бесконечной ленты (42) расширяется наружу в точке, где бесконечная лента (42) впервые входит в зацепление с передней направляющей (58) для определения отверстия (66) для приема пищевых изделий (30), выгружаемых из накопителя (24, 24A, 24B);
транспортируют пищевые изделия (30) заранее выбранными группами на бесконечной ленте (42) на нижнюю ветвь (48) бесконечной ленты (42) на верхний скользящий затвор (78) и синхронизируют движение бесконечной ленты (42) с движением накопителя (24, 24A, 24B) для разнесения пищевых изделий (30) на заранее определенные группы на верхнем скользящем затворе (78);
открывают верхний скользящий затвор (78), давая первому заранее определенному набору групп пищевых изделий (30) упасть в разделяющий лоток (92), который поддерживает заранее выбранные группы на нижнем скользящем затворе (98); и
открывают нижний скользящий затвор (98), позволяя первому заранее выбранному набору групп пищевых изделий (30) упасть в дискретные упаковки (106).
20. Способ по п. 19, при котором этап приема и накопления пищевых изделий (30) в накопителе (24, 24A, 24B) содержит этап, на котором последовательно принимают пищевые изделия (30) между разнесенными лопатками (28) на верхней ветке (32) первой ленты (26) челночного транспортера (24, 24A, 24B), одновременно смещая челночный транспортер (24, 24A, 24B) в продольном направлении и вращая первую ленту (26) для транспортировки пищевых изделий (30) на нижнюю ветвь (34) первой ленты (26).
21. Способ по п. 20, далее содержащий этап, на котором затем открывают верхний скользящий затвор (78), давая второму заранее выбранному набору групп пищевых изделий (30) упасть в разделяющий лоток (92) поверх первого заранее выбранного набора групп пищевых изделий (30); а этап, на котором открывают нижний скользящий затвор, (98) содержит этап, на котором открывают нижний скользящий затвор, давая первому и второму заранее выбранным наборам групп пищевых изделий (30) упасть в дискретные контейнеры (106).
| US 7581634 B2, 01.09.2009 | |||
| US 4733518 A, 29.03.1988 | |||
| US 6141943 A, 07.11.2000. |

