Предлагаемое устройство относится к системам управления летательных аппаратов и предназначено для снижения амплитуды механических колебаний летательного аппарата (ЛА) при динамических изменениях угловой скорости углов курса, тангажа, крена.
Как известно, управление направлением движения ЛА реализуется поворотом углов аэродинамических поверхностей ЛА, которое осуществляется приводами. В беспилотных ЛА в качестве привода этих поверхностей используется, как правило, электрический привод, для управления которого используется информация с датчиков угловых скоростей (ДУС). В общем случае требуемый угол поворота летательного аппарата для привода поворота является управляющим воздействием, он сравнивается с измеренным углом поворота летательного аппарата, который определяется интегрированием угловой скорости, измеренной с помощью ДУС и сигнал разности углов через корректирующее звено (регулятор) передается на привод поворота. При этом привод, как правило, имеет обратную связь по положению аэродинамической поверхности, которое определяется потенциометром обратной связи (ПОС). При синтезе регулятора стремятся обеспечить как можно большую частотную полосу пропускания управляющего воздействия с целью обеспечения требуемой динамики ЛА, которая ограничивается запасом устойчивости системы управления ЛА или степенью механических колебаний ЛА. При этом привод, замкнутый по цепи обратной связи, может быть аппроксимирован колебательным звеном второго порядка, нагрузкой для привода является ЛА, имеющий массу с ограниченной жесткостью. Так что нагрузка привода поворота также может быть аппроксимирована колебательным звеном второго порядка. Если собственные частоты системы управления и его нагрузки будут близки, то ЛА будет испытывать значительные механические колебания. Собственная частота летательного аппарата ограничивает его динамику и, как правило, при проектировании системы управления ЛА стремятся частоту среза системы управления ограничивать исходя из правила, где первый тон собственной частоты ЛА. Только при этом достигается приемлемая степень механических колебаний ЛА. Однако тем самым ограничивается основная динамическая характеристика ЛА, уменьшается полоса частот допустимых управляющих воздействий, снижается быстродействие ЛА при отработке требуемых траекторий движения ЛА, снижается живучесть ЛА при подлете к цели, защищенной ПВО. Например, известен способ управления летательного аппарата по патенту №2700157, в котором траектория движения ЛА формируется так, чтобы обойти опасные зоны поражения ЛА по методу Дейкстуры. Эти траектории характеризуются большими угловыми скоростями.
Аналогом предлагаемого регулятора является система регулирования угла тангажа самолета, описанная в книге А.А. Красовского и Г.С.Поспелова. Основы автоматики и технической кибернетики. Государственное энергетическое издательство. Москва. 1962 г., страница 186. На странице 186 приведена структурная схема регулятора, которая содержит автопилот, включающий привод поворота аэродинамических поверхностей, гироскопическое устройство определяющее угловые скорости или углы поворота ЛА и корректирующие звенья. Система имеет отрицательную обратную связь и замкнута по углам поворота ЛА. Корректирующие звенья системы рассчитаны из условия обеспечения устойчивости ЛА и приемлемой степени механических колебаний ЛА, которая достигнута за счет снижения частоты среза регулятора. Недостатком такой системы является низкое быстродействие, ограничивающее угловую скорость на траектории движения ЛА.
Целью данного предложения является повышение быстродействия регулятора. С этой целью в систему регулирования углов ЛА, содержащую отрицательную обратную связь по углу ЛА, реализованную на устройстве сравнения заданного угла и угла отработанного ЛА, дополнительно вводят нелинейный контур регулирования, содержащий выпрямитель, подключенный к сигналу обратной связи по углу ЛА, выход которого связан с первым входом компаратора, второй вход компаратора соединен с выходом второго выпрямителя, входом соединенного с сигналом задающим требуемый угол, компаратор, который определяет расхождение между абсолютными значениями заданного угла и угла отработанного ЛА, выходом соединен с управляющим входом ключа, информационный вход которого соединен с операционным усилителем, подключенным входом к сигналу ошибки исходного контура управления, причем выход ключа подключен ко входу дополнительно введенного суммирующего устройства, первый вход которого соединен с выходом корректирующих звеньев, а выход сумматора подключен непосредственно к приводу. Дополнительно введенный контур реализует полупериодное регулирование механических колебаний ЛА. При этом частота среза исходного регулятора может быть приближена к собственной частоте ЛА, что в исходной системе уменьшит запас по фазе и снизит тем самым запас устойчивости регулятора, что приведет к увеличению степени механических колебаний ЛА. Дополнительно введенный контур регулирования при этом обеспечит электронное демпфирование этих колебаний за счет подачи на привод системы дополнительного сигнала управления, уменьшающего добротность разомкнутого контура только в отрезки времени, когда абсолютная величина отработанного угла превышает абсолютное значение заданного угла положения ЛА. Этот сигнал снизит частоту среза регулятора в случаях, когда угол ЛА больше заданного угла. Частота среза определяется амплитудно-частотной характеристикой разомкнутого контура системы.
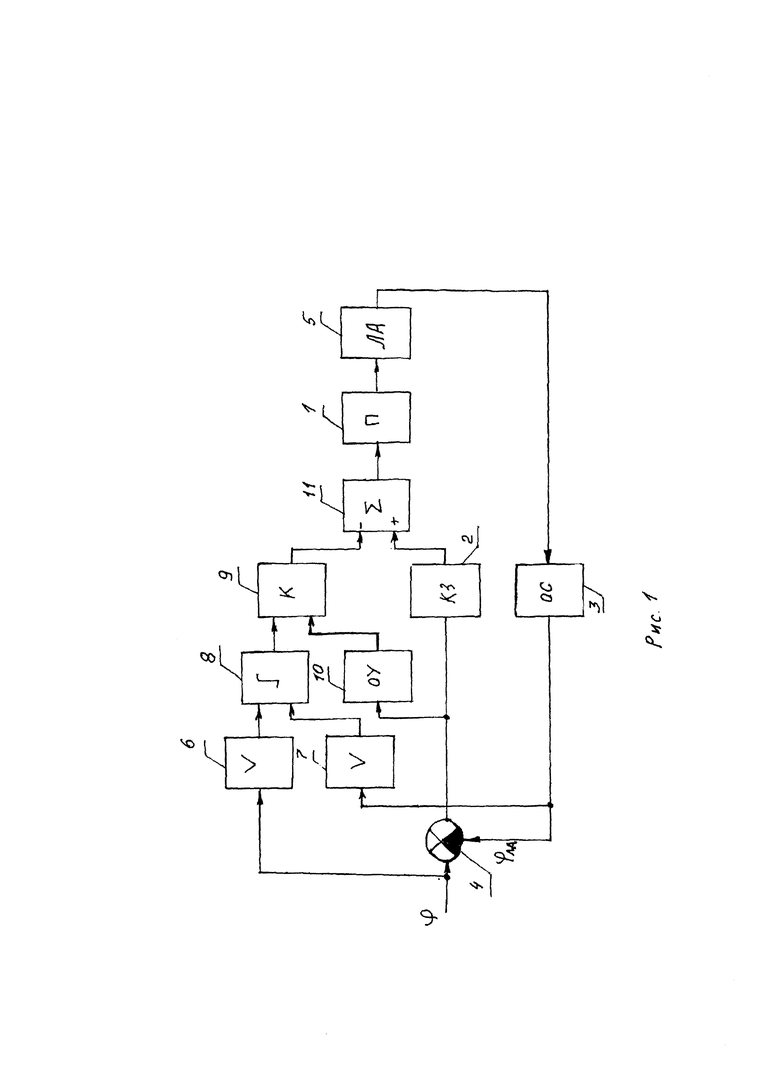
На рисунке 1 приведена блок-схема предложенного регулятора;
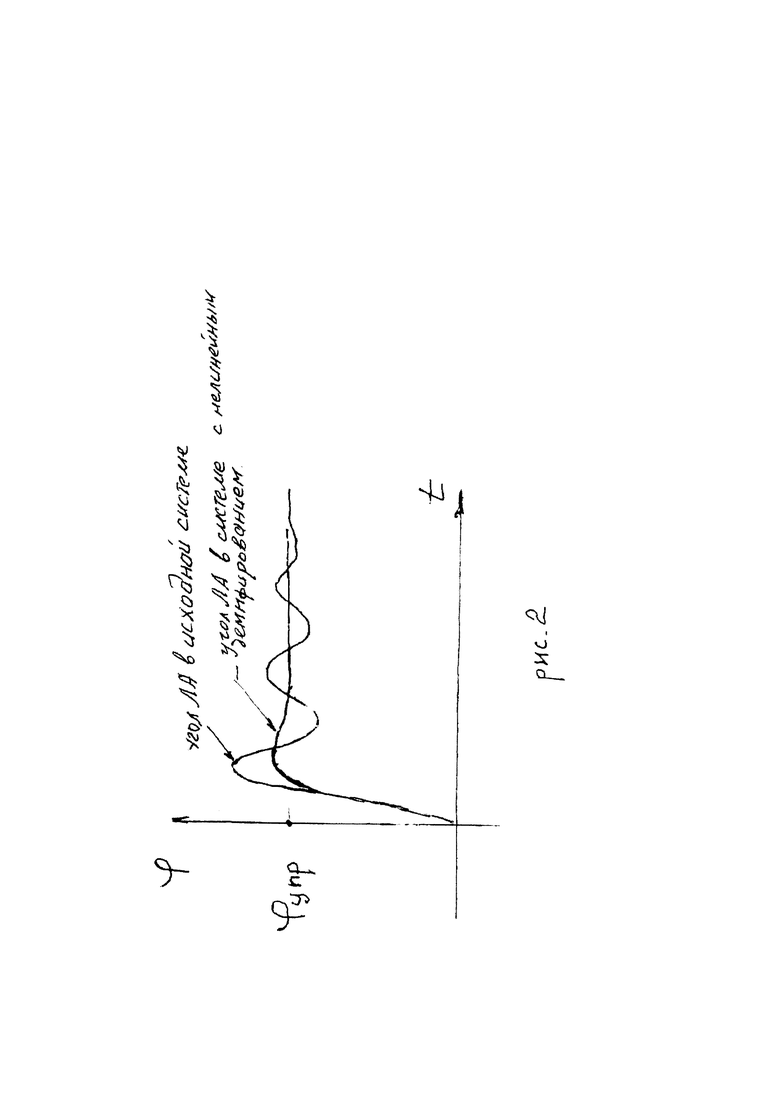
На рисунке 2 приведены осциллограммы механических колебаний в исходной системе и в системе с предложенным регулятором.
Регулятор содержит исходный контур регулирования, содержащий привод аэродинамической поверхности 1, корректирующие звенья 2, отрицательная обратная связь по углу 3 реализуется на гироскопических датчиках, устройство сравнения 4 и летательный аппарат 5. Дополнительно введенный нелинейный контур регулирования механических колебаний ЛА содержит: выпрямитель сигнала о задающем угле 6, выпрямитель сигнала об отработанном угле ЛА 7, компаратор 8, ключ 9, усилитель 10 и дополнительно введенное суммирующее устройство 11. Введение дополнительно введенного нелинейного регулятора позволяет уменьшить колебания ЛА за счет снижения коэффициента усиления в разомкнутом контуре управления (уменьшения добротности регулятора). При этом быстродействие системы не уменьшится. Без нелинейного регулятора при этом увеличивается степень механических колебаний. За счет подачи на привод дополнительного сигнала только в моменты времени, когда угол ЛА превышает требуемый угол его положения, приводит в эти отрезки времени к уменьшению добротности регулятора, а значит и к повышению его устойчивости. Возврат угла из состояния перерегулирования при этом осуществляется не только за счет потребления энергии приводом, но и за счет энергии упругих колебаний ЛА. Когда угол положения ЛА менее угла заданного, дополнительный нелинейный регулятор выключен и работает только исходный регулятор. При этом энергия упругих механических колебаний ЛА суммируется с энергией привода, угол положения ЛА приближается к заданному углу с большей угловой скоростью.
Общими элементами предложенного регулятора и широко известных регуляторов являются исходная система регулирования, содержащая привод 1 с корректирующими звеньями 2, отрицательной обратной связью 3, реализованной на гироскопах, установленных на ЛА 5 и устройство сравнения углов 4.
Отличительным элементом является введенный дополнительно нелинейный контур управления, содержащий выпрямители 6 и 7, компаратор 8, ключ 9, усилитель 10 и сумматор 11.
За счет дополнительно введенного нелинейного регулятора расширена полоса пропускания регулятора при обеспечении уменьшенных механических колебаний ЛА. Тем самым предложен регулятор колебаний амплитуды механических колебаний в контуре управления положением ЛА, содержащий привод аэродинамической поверхности ЛА с корректирующими звеньями, с цепью отрицательной обратной связью по углу, реализованной на гироскопах, и с устройством сравнения, отличающий тем, что в нем частота среза исходного контура регулирования приближена к собственной частоте упругих колебаний ЛА, а механические колебания ЛА уменьшены за счет введения дополнительного нелинейного регулятора содержащего компаратор, на котором сравниваются выходные сигналы двух выпрямителей, один из которых подключен к управляющему входу задания углов положения ЛА, а второй к выходу сигнала об угле ЛА, выход компаратора подключен к управляющему входу ключа, информационный вход которого соединен с выходом операционного усилителя, входом подключенным к выходу устройства сравнения исходного регулятора, а выход ключа соединен с первым входом дополнительно введенного сумматора, второй вход которого связан с выходом корректирующих звеньев и подключен к приводу.
Фактически предложена однополупериодная отрицательная обратная связь, которая дополнена к исходному линейному регулятору, рассчитанному из условия обеспечения требуемого быстродействия. Ограничения степени механических колебаний обеспечены за счет уменьшения добротности регулятора только в периоды, когда угол отработанный ЛА больше управляющего угла. Введение нелинейного электронного демпфирования механических колебаний летательного аппарата позволило расширить частотную полосу управляющих воздействий на ЛА и тем самым повысить его быстродействие и при этом не увеличивается амплитуда механических колебаний ЛА. Такая система относится к классу систем с самонастройкой параметров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система управления продольным движением при разбеге по взлётно-посадочной полосе и наборе высоты беспилотного летательного аппарата со специально расположенными передними и задними крыльями | 2018 |
|
RU2695897C1 |
| Устройство для управления реверсивным вентильным электродвигателем | 1982 |
|
SU1064412A2 |
| Система управления с упругой механической связью | 1977 |
|
SU717717A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Рентгеновский генератор | 1979 |
|
SU784032A1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С АВТОКОЛЕБАТЕЛЬНЫМ ПРИВОДОМ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ | 2010 |
|
RU2435131C1 |
| Устройство для управления трехфазным непосредственным преобразователем частоты | 1981 |
|
SU995259A1 |
Регулятор содержит привод аэродинамической поверхности, корректирующие звенья, гироскопические датчики, устройство сравнения, выпрямитель сигнала о задающем угле, выпрямитель сигнала об отработанном угле ЛА, компаратор, ключ, усилитель, суммирующее устройство, соединенные определенным образом. Обеспечивается повышение быстродействия регулятора. 2 ил.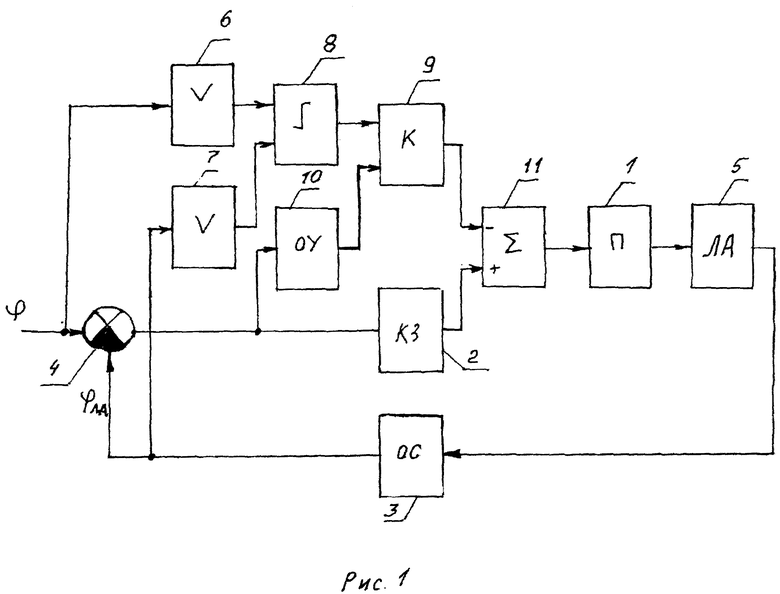
Регулятор амплитуды колебаний в контуре управления направлением движения летательного аппарата (ЛА), содержащий привод аэродинамической поверхности ЛА с корректирующими звеньями, с цепью отрицательной обратной связи по углу, реализованной на гироскопах, и с устройством сравнения, отличающийся тем, что в нем частота среза контура регулирования приближена к собственной частоте упругих колебаний ЛА, а механические колебания ЛА при этом уменьшены за счет введения дополнительного нелинейного регулятора, содержащего компаратор, на котором сравниваются выходные сигналы двух выпрямителей, один из которых подключен к управляющему входу задания углов положения ЛА, а второй - к выходу сигнала об угле ЛА, выход компаратора подключен к управляющему входу ключа, информационный вход которого соединен с выходом усилителя, входом подключенным к выходу устройства сравнения исходного регулятора, а выход ключа соединен с первым входом дополнительно введенного сумматора, второй вход которого связан с выходом корректирующих звеньев, а его выход подключен непосредственно к приводу.
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2234725C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2461041C1 |
| US 20140365035 A1, 11.12.2014 | |||
| US 20200150690 A1, 14.05.2020. | |||

