Область техники
Изобретение относится к области организации безопасного управления движением грузовых поездов, а именно - к способу автоматического регулирования скорости и устройству для его реализации. Изобретение обеспечивает соблюдение требований к величинам наибольших продольных динамических сил, снижая вероятность разрушения автосцепок с последующим разрывом поезда, что является угрозой безопасности движения, повреждения вагонов и груза, а также повышение средней скорости движения грузовых поездов и экономию топливо-энергетических ресурсов путем автоматического выбора алгоритма управления при разгоне (торможении) поезда до заданной скорости.
Уровень техники
Известен способ регулирования скорости (Л-1), используемый в контуре регулирования скорости двухконтурной системы автоведения электровозов с реостатно-контакторным регулированием. От вышестоящей системы автоведения в устройство сравнения регулятора скорости поступает значение заданной скорости. В устройстве сравнения оно сравнивается со значением измеренной скорости и скорректированным значением фактического ускорения. В результате сравнения определяется рассогласование скорости, на основе величины и знака рассогласования которого осуществляется набор либо сброс позиций группового переключателя. Данный способ был разработан для пассажирского электровоза со ступенчатым регулированием, не учитывал параметры поезда, а также величины возникающих в поезде продольных сил.
Известен способ регулирования скорости (Л-2, Л-3), используемый на электровозах переменного тока серий 2ЭС5К, оборудованных микропроцессорной системой управления и плавным бесконтактным регулированием напряжения на тяговых двигателях. В этом случае с помощью задатчика скорости машинист вводит значение заданной скорости, с помощью задатчика силы тяги (торможения) - максимальное значение силы тяги или тормозной силы, а следовательно, и тока тяговых двигателей. Система осуществляет разгон (торможение) электровоза до заданной скорости. Одно из отличий данного способа - наличие задатчика параметров поезда для ввода в САУ информации о массе вагонов и их числе. В данном способе регулирования регулятор скорости имеет дополнительную обратную связь по ускорению, коэффициент этой обратной связи формируется на основе параметров поезда. Тем не менее, данный способ практически не учитывает динамические процессы, протекающие в поезде в переходных режимах движения. Кроме того, в этом способе невозможен выбор оптимальных параметров регулятора скорости для любых параметров поезда.
Известен способ повышения безопасности движения грузовых поездов за счет ограничения возникающих при торможении длинносоставного грузового поезда продольных сил путем определения режимной карты движения конкретного поезда по конкретному участку пути (Л-4). В этом случае на основе параметров поезда, пути и профиля заранее определяется максимально возможная скорость движения в каждой точке пути. Данный способ ограничивает только максимально допустимые величины продольных сил, возникающие при экстренном торможении поезда и не учитывает продольные силы, возникающие в режиме тяги.
Известен способ регулирования скорости для электровоза с плавным регулированием скорости (Л-5). В этом случае для ограничения величин продольных динамических сил в переходных режимах движения на входе замкнутого контура управления скоростью установлено устройство для сглаживания скачкообразно изменяющегося сигнала, поступающего от задатчика скорости. Для обеспечения требуемого качества управления в переходных режимах движения данное устройство предусматривает двухэтапное изменение задающего сигнала при разгоне (торможении) поезда. Во время первого этапа осуществляется предварительное растяжение (сжатие) поезда с пониженным ускорением (замедлением). После завершения растяжения (сжатия) поезда осуществляется второй этап разгона (торможения) с максимальным ускорением (замедлением). Данный способ позволяет снизить величины продольных динамических сил, возникающих в поезде в переходных режимах движения. Кроме того, улучшается характер протекания переходного процесса, в результате чего снижается величина усталостных повреждений, накопленных автосцепками поезда.
Сглаживающее устройство рассмотренной САУ скоростью (Л-5) реализовано на базе апериодического звена второго порядка с переходной функцией вида:

Где: ƒ1(t) - переходная функция;  - величина заданного ускорения поезда; х1 - доля от заданного ускорения, реализуемая во время первой ступени разгона или торможения; Т1, Т2 - постоянные времени звена, t - текущее время
- величина заданного ускорения поезда; х1 - доля от заданного ускорения, реализуемая во время первой ступени разгона или торможения; Т1, Т2 - постоянные времени звена, t - текущее время
Величина задержки от начала первой ступени разгона (торможения) до начала второй ступени определена как предполагаемое время растяжения предварительно сжатого поезда (Л-6):

Где: tтp - время растяжения предварительно сжатого поезда; N - число вагонов в поезде; Δ0i - зазор в поглощающем аппарате i-й автосцепки;  - суммарное максимальное удлинение поглощающих аппаратов поезда
- суммарное максимальное удлинение поглощающих аппаратов поезда
На втором этапе увеличения силы тяги (торможения) сглаживающее устройство реализует аналогичную переходную функцию ƒ2(t):

Результирующая функция увеличения силы тяги (торможения) ƒ(t) описывается формулами (4 и 5) для первого и второго этапов разгона (торможения) соответственно:


Раскрытие изобретения
В качестве прототипа выбран объект, рассмотренный в (Л-5) и являющийся наиболее близким по технической сущности к заявляемому изобретению.
Необходимо отметить, что вышерассмотренный алгоритм разгона (торможения) поезда в два этапа обеспечивает уменьшение величин продольных динамических сил, но не всегда является необходимым по условиям динамических процессов, протекающих в поезде. Так, при повторном разгоне поезда с растянутыми межвагонными соединениями в нем практически не возникает продольных динамических сил. В этом случае использование разгона поезда в два этапа приводит к затягиванию переходных процессов, снижению средней скорости движения и повышению расхода энергоресурсов на тягу поездов. В таких случаях целесообразен переход сразу ко второму этапу разгона (торможения), т.е. осуществление разгона (торможения) в один этап.
Техническим результатом, на который направлено изобретение, является повышение средней скорости движения и снижение расхода энергоресурсов на тягу поездов путем сокращения времени разгона (торможения) поезда (в тех случаях, где это допустимо по условиям возникающих в поезде продольных динамических сил) при выполнении требований по обеспечению безопасного движения поезда за счет снижения величин продольных динамических сил.
Сущность изобретения состоит в том, что в усовершенствованном способе автоматического управления скоростью движения поезда перед началом разгона либо торможения осуществляется автоматический выбор режима разгона (торможения) поезда. На основе оценки состояния поезда (растянут либо сжат) устройством регулирования скорости выбирается алгоритм управления для разгона (торможения) в один или в два этапа. Если осуществляется разгон поезда и состояние поезда оценивается как растянутое, разгон поезда осуществляется в один этап (с максимальным ускорением). В противном случае будет выбран разгон поезда в два этапа (сначала с пониженным ускорением для предварительного растяжения поезда, затем с максимальным ускорением). Аналогично, если осуществляется торможение поезда и состояние поезда оценивается как сжатое, торможение поезда осуществляется с максимальным замедлением. В противном случае торможение поезда также осуществляется в два этапа, с пониженным замедлением для предварительного сжатия поезда, а затем с максимальным замедлением. Тем самым исключается возникновение в поезде продольных динамических сил недопустимой величины, а также сокращается время переходного процесса.
Краткое описание чертежей
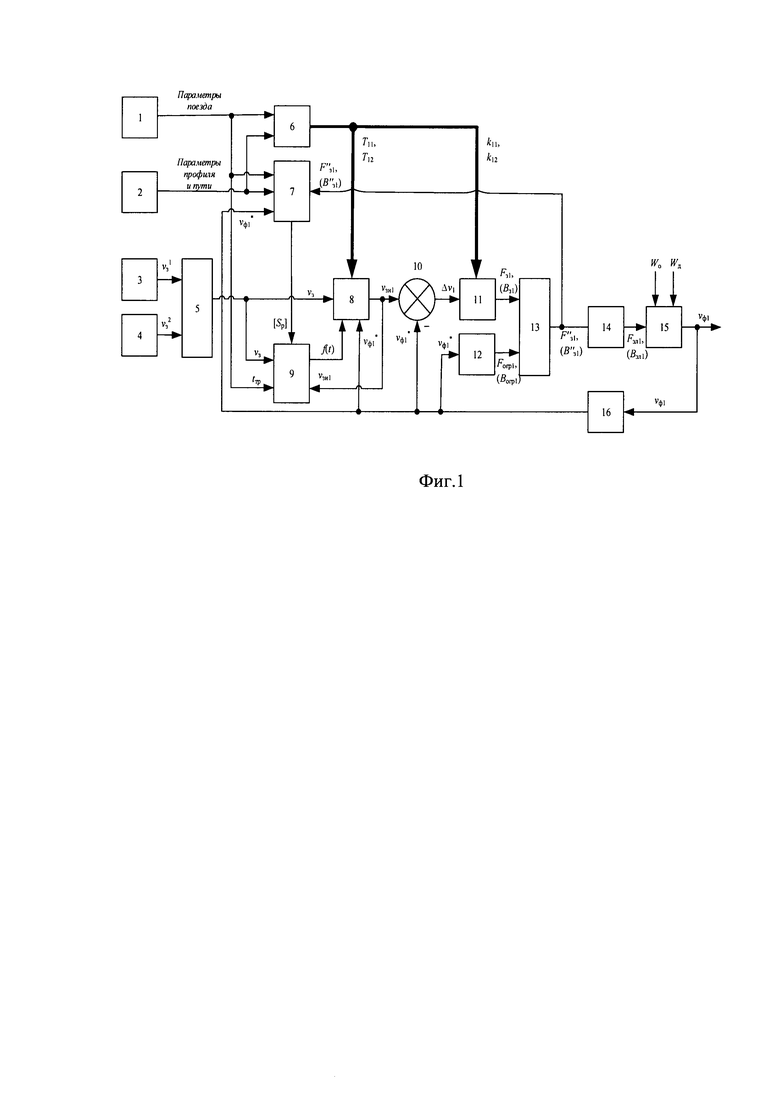
На Фиг. 1 изображена функциональная схема системы автоматического управления скоростью движения поезда, реализующей данный принцип.
1 - задатчик параметров поезда;
2 - электронная карта с данными пути и профиля;
3 - система автоведения;
4 - задатчик скорости;
5 - элемент выбора минимального значения заданной скорости νз1 и νз2;
6 - модуль адаптации;
7 - устройство осуществляет расчет величин продольных сил для каждой межвагонной связи поезда (Л-7);
8 - сглаживающее устройство;
9 - устройство выбора алгоритма управления;
10 - устройство сравнения;
11 - устройство управления;
12 - устройство ограничений;
13 - устройство выбора минимального значения тяги (торможения);
14 - исполнительное устройство;
15 - объект управления (поезд);
16 - измерительное устройство.
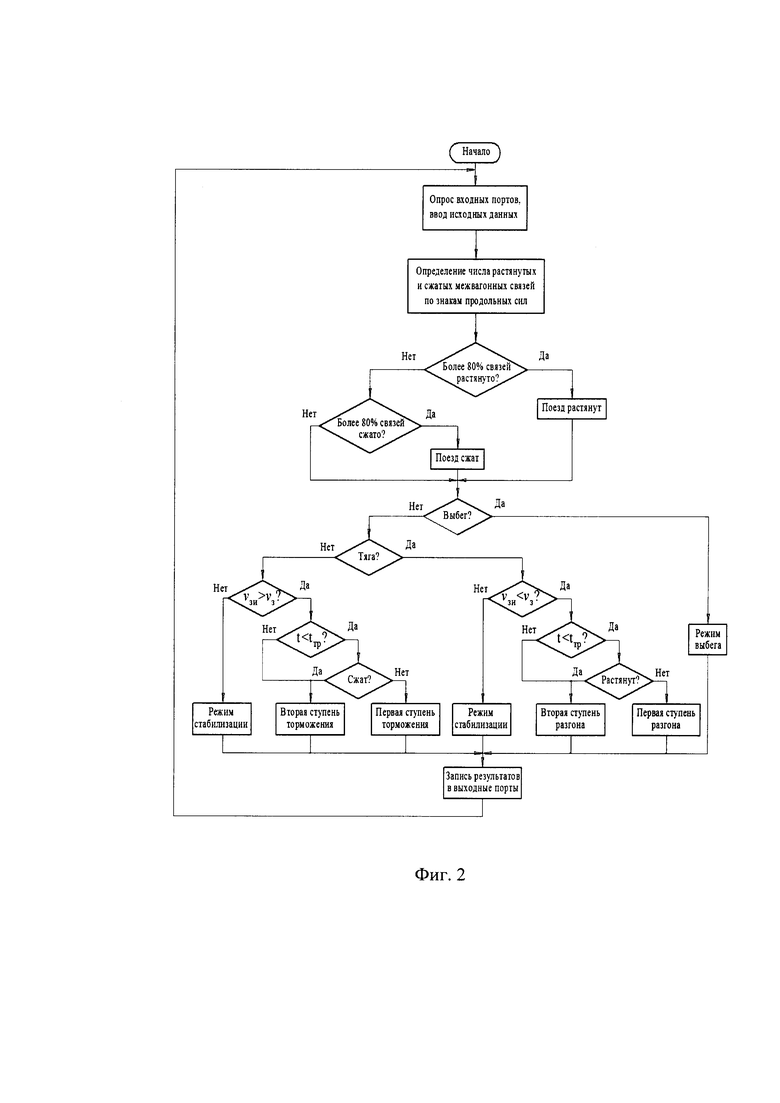
На Фиг. 2 приведена схема алгоритма работы устройства автоматического выбора режима разгона (торможения) поезда.
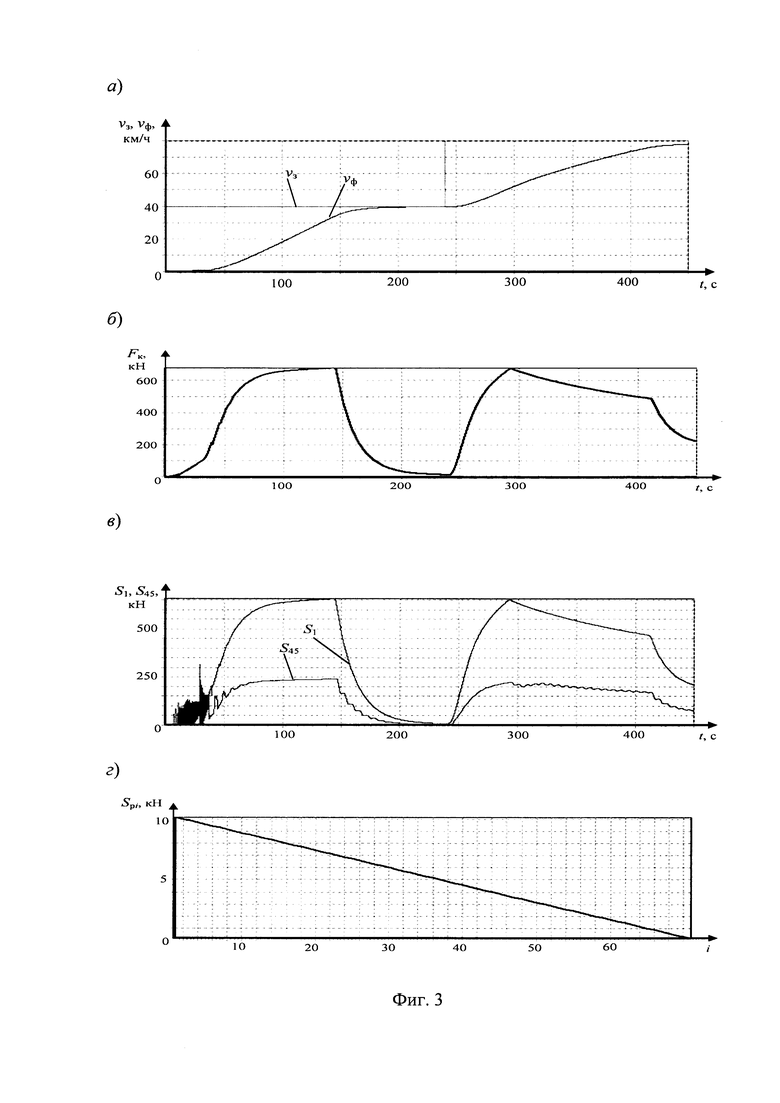
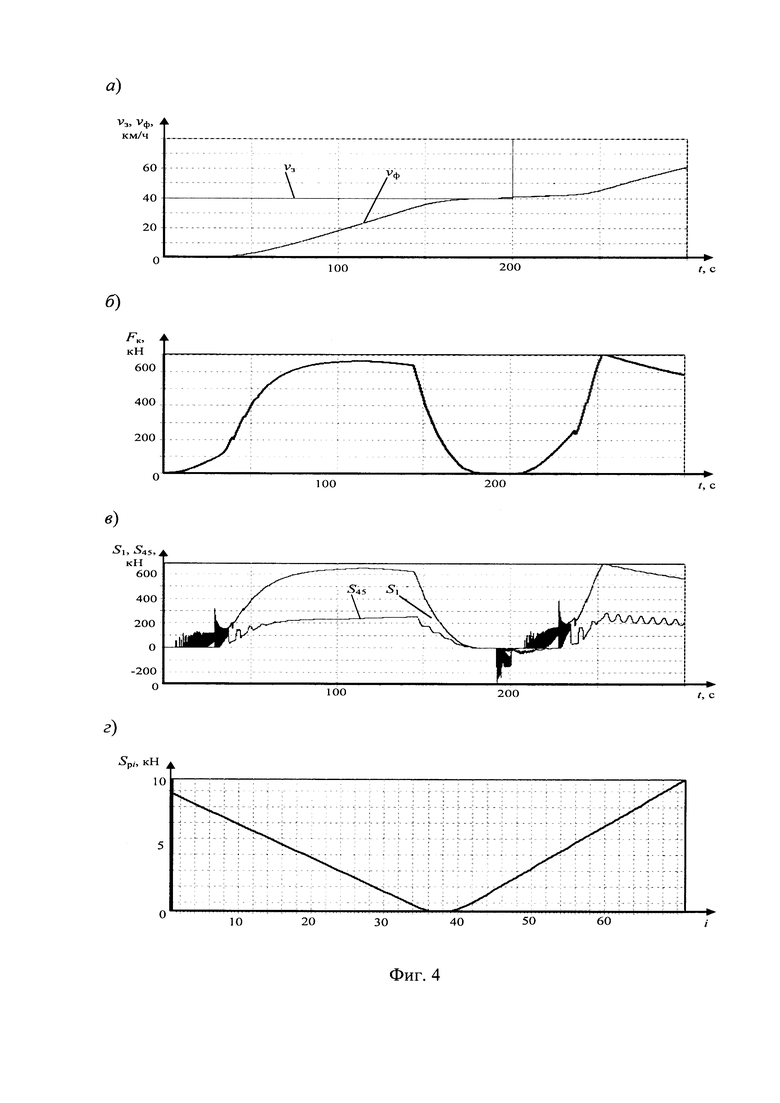
На Фиг. 3 и Фиг. 4 представлены результаты моделирования работы устройства автоматического регулирования скорости движения поезда при управлении грузовым поездом весом 6390 т из 71 груженого вагона массой 90 тонн каждый и электровоза массой 180 тонн.
Осуществление изобретения
Функциональная схема включает в себя задатчик параметров поезда 1, электронную карту с данными пути и профиля 2, систему автоведения 3 и задатчик скорости 4. Задатчик скорости и система автоведения формируют значения заданной скорости νз1 и νз2, а элемент 5 выбирает минимальное из этих двух значений.
Модуль адаптации 6 на основе параметров поезда определяет параметры системы автоматического управления: постоянные времени T11, Т12 и коэффициенты устройства управления k11, k12. В устройстве 7 на основе параметров поезда (количество и масса вагонов), пути и профиля, величины силы тяги локомотива, а также измеренной скорости движения осуществляется расчет величин продольных сил для каждой межвагонной связи поезда (Л-7). Расчетные величины продольных сил передаются в устройство 9 выбора алгоритма управления. Сигнал заданной скорости изменяется скачкообразно, поэтому для его сглаживания, а значит, и для ограничения темпа изменения силы тяги или торможения, предусмотрено сглаживающее устройство 8. Устройство выбора алгоритма управления 9 на основании массива величин продольных сил осуществляет оценку степени растяжения (сжатия) поезда. В зависимости от степени растяжения (сжатия) и выбранного режима движения устройство 9 выбирает переходную функцию изменения силы тяги (торможения), аналогичную переходной функции устройства-прототипа, и реализующую разгон (торможение) поезда в один или два этапа. Выбор осуществляется в соответствии с алгоритмом, приведенным на Фиг 2.
Согласно этому алгоритму, устройство 9 в каждый момент времени получает от устройства 7 массив расчетных величин продольных сил [Sp], определенных для каждого межвагонной связи. На основании знаков величин этих сил устройство 9 оценивает состояние межвагонной связи (растянута либо сжата). Если число растянутых межвагонных связей превышает некоторое пороговое значение, устройство оценивает состояние поезда как растянутое и в режиме разгона (фактическая скорость меньше заданной) выбирает алгоритм разгона поезда в один этап. Аналогично, если число сжатых межвагонных связей превышает некоторое пороговое значение, устройство оценивает состояние поезда как сжатое и в режиме торможения выбирает алгоритм торможения поезда в один этап. На основании пробных расчетов, величина порогового значения как при оценке растянутого, так и при оценке сжатого состояния поезда принята равной 80% межвагонных связей. Поскольку при трогании с места исходное состояние поезда не известно, при трогании поезда с места устройство 9 всегда выбирает алгоритм разгона в два этапа.
Устройство сравнения 10 вычисляет рассогласование величин скорректированной заданной и фактической измеренной скоростей движения Δν1=νзи1-νф1. Эта величина, а также значения коэффициентов управления k11 и k12 поступают на вход устройства управления 11. Оно осуществляет пропорционально-интегральный закон управления скоростью движения. На выходе устройства 11 формируется заданное значение силы тяги (торможения) Fз1 (Вз1).
Во избежание выхода силы тяги (торможения) за ограничения, накладываемые на тяговый электропривод локомотива, предусмотрено устройство ограничений 12. На основании информации о фактической измеренной скорости движения оно определяет максимально допустимое значение силы тяги (торможения) Foгp1 (Вогр1). Устройство 13 выбирает минимальное из двух значений силы тяги (торможения), рассчитанных устройством управления 11 и устройством ограничений 12. Выбранное значение силы тяги (торможения) поступает в исполнительное устройство 14 - автоматизированный тяговый электропривод локомотива, на выходе которого формируется фактическое значение силы тяги (торможения). Сила тяги (торможения) Fэлl (Вэл1) выполняет силовое воздействие на объект управления 15 - поезд, на который также действуют силы основного Wо и дополнительного Wд сопротивления движению. Для измерения фактической скорости движения локомотива  предусмотрено измерительное устройство 16, которое учитывает дискретизацию по времени и текущее усреднение измеряемого сигнала.
предусмотрено измерительное устройство 16, которое учитывает дискретизацию по времени и текущее усреднение измеряемого сигнала.
Предлагаемое устройство отличается от прототипа наличием электронной карты с данными пути и профиля 2, отдельного модуля адаптации 6, наличием устройства 7 оценки величин продольных сил, устройства 9 автоматического выбора алгоритма разгона (торможения), отсутствием отдельного устройства 7 для расчета силы тяги при скоростях менее 4 км/ч и логического блока 11, а также автоматическим изменением алгоритма разгона (торможения) поезда на основе оценки состояния его межвагонных связей.
На Фиг. 3 и Фиг. 4 представлены результаты моделирования работы устройства автоматического регулирования скорости движения поезда при управлении грузовым поездом весом 6390 т из 71 груженого вагона массой 90 тонн каждый и электровоза массой 180 тонн. Рассмотрен режим трогания поезда с места, разгона до скорости 40 км/ч и перехода к стабилизации скорости, а затем - повторный разгон поезда до скорости 80 км/ч. При этом на Фиг. 3 представлены результаты расчетов для режима движения по площадке с выбором повторного разгона поезда в один этап, а на Фиг. 4 - результаты расчетов для режима движения по площадке и спуску с выбором повторного разгона в два этапа. Согласно вышерассмотренному алгоритму управления, трогание с места в обоих случаях осуществлялось в два этапа. Для обоих случаев на Фиг. 3 и Фиг. 4 представлены графики зависимостей заданной и фактической скоростей движения поезда от времени νз(t) и νф(t) (а), график зависимости силы тяги локомотива от времени Fr(t) (б), графики зависимостей продольной силы в 1-м и 45-м межвагонных соединениях от времени S1(t) и S45(t) (в), а также диаграмма распределения величин продольных сил в межвагонных связях поезда Sp(i) к моменту начала повторного разгона поезда (г).
Результаты моделирования движения поезда с усовершенствованным устройством автоматического регулирования скорости показывают, что при использовании одноэтапного разгона поезда там, где это допустимо, величины продольных динамических сил не превышают максимально допустимого по условиям прочности автосцепок значения, равного 1 МН (Л-8), кроме этого, сокращается время разгона поезда на 30-40 с в расчете на один разгон (торможение). Также, выполненные расчеты показали, что при использовании одноэтапного разгона поезда, расход энергии на тягу сокращается на 2,5-3,0% в расчете на один разгон поезда. Моделирование устройства автоматического регулирования скорости в режиме одноэтапного торможения также показывает отсутствие превышения максимального значения продольных динамических сил, а также сокращение времени, затраченного на торможение поезда.
Список использованных источников:
1) Баранов Л.А. Исследование структуры регулятора скорости для пассажирских поездов с электрической тягой / Л.А. Баранов, Я.М. Головичер, И.А. Аснис // Вестник ВНИИЖТ, №3, 1982.
2) Автоматизированные системы управления электроподвижным составом: учебник: в 3 ч. Ч. 1: Теория автоматического управления / Л.А. Баранов, А.Н. Савоськин, О.Е. Пудовиков и др.; под ред. Л.А. Баранова и А.Н. Савоськина. - М.: ФГБОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2013. - 400 с.
3) Электровоз 2ЭС5К. Руководство по эксплуатации. Книга 5. - Новочеркасск: ВЭлНИИ-НЭВЗ, 2005. - 164 с.
4) Способ определения максимальной скорости и способ регулирования скорости движения поезда по участку. Патент № RU 2265874. Опубликован: 10.12.2005. Бюл. №34 / Л.А. Мугинштейн, В.М. Абрамов, М.С. Пясик, И.А. Ябко.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2399515C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ ОДНОФАЗНО-ПОСТОЯННОГО ТОКА С ТРАНЗИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ВОЗБУЖДЕНИЯ | 2023 |
|
RU2824412C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2202481C2 |
| Устройство для автоматического управления электровозом | 1981 |
|
SU954267A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВОЖДЕНИЯ ГРУЗОВЫХ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ С РАСПРЕДЕЛЕННЫМИ ПО ИХ ДЛИНЕ ЛОКОМОТИВАМИ | 2003 |
|
RU2238860C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2023 |
|
RU2818401C1 |
| Способ регулирования сил тяги и торможения электроподвижного состава | 1987 |
|
SU1416346A1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2768303C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ КООРДИНАТНЫХ ОТРЕЗКОВ | 2021 |
|
RU2789420C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ КООРДИНАТНЫХ ОТРЕЗКОВ БЕЗ БЛОК-УЧАСТКОВ И ПУТЕВЫХ СВЕТОФОРОВ | 2021 |
|
RU2789232C1 |
Изобретение относится к движению поездов. В способе автоматического регулирования скорости движения длинносоставного грузового поезда автоматически выбирают алгоритм разгона либо торможения, при котором осуществляется оценка величин возникающих в поезде продольных сил, позволяющая оценить состояние поезда - растянутое либо сжатое, перед началом разгона или торможения. В зависимости от состояния поезда осуществляется выбор алгоритма разгона либо торможения в два этапа: с пониженным ускорением или замедлением на первом этапе, а после завершения растяжения или сжатия поезда - с максимальным ускорением или замедлением на втором этапе. Там, где на основе оценки состояния поезда маловероятно возникновение в поезде продольных динамических сил, - в один этап, при котором весь процесс разгона или торможения осуществляется с максимальным ускорением или замедлением. Повышается средняя скорость движения и снижается расход энергоресурсов. 2 н.п. ф-лы, 4 ил.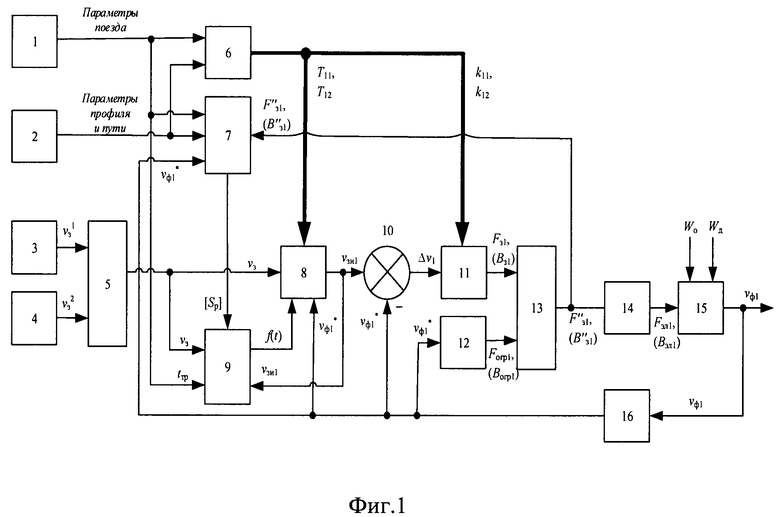
1. Способ автоматического регулирования скорости движения длинносоставного грузового поезда, осуществляемый путем задания необходимой скорости движения, отличающийся автоматическим выбором алгоритма разгона либо торможения поезда, при котором осуществляется оценка величин возникающих в поезде продольных сил, которая позволяет оценить состояние поезда - растянутое либо сжатое, перед началом разгона или торможения, при этом в зависимости от состояния поезда осуществляется выбор алгоритма разгона либо торможения поезда в два этапа: с пониженным ускорением или замедлением поезда на первом этапе, а после завершения процесса растяжения или сжатия поезда - с максимальным ускорением или замедлением поезда на втором этапе, а там, где на основе оценки состояния поезда маловероятно возникновение в поезде продольных динамических сил, - в один этап, при котором весь процесс разгона или торможения поезда осуществляется с максимальным ускорением или замедлением, что обеспечивает повышение средней скорости движения поезда и экономию энергоресурсов на тягу поездов.
2. Устройство автоматического регулирования скорости движения поезда, состоящее из устройства определения параметров закона управления, входы которого связаны с задатчиком параметров поезда и электронной картой пути и профиля, а выход - со сглаживающим устройством и устройством управления; устройства выбора минимального сигнала, вход которого соединен с задатчиком скорости и вышестоящей системой автоведения, а выход - со входом сглаживающего устройства; устройства расчета величин продольных сил, возникающих в поезде, входы которого соединены с выходами задатчика параметров поезда, электронной карты, устройства измерения скорости и устройства выбора минимального значения силы тяги или торможения; устройства выбора алгоритма разгона или торможения поезда, на входы которого поступают выходные сигналы от устройства расчета величин продольных сил, задатчика параметров поезда, устройства выбора минимального сигнала и устройства измерения скорости, а выходной сигнал с которого поступает в сглаживающее устройство; сглаживающего устройства, на вход которого поступают сигналы с выхода устройства выбора минимального сигнала, устройства выбора алгоритма разгона или торможения и устройства измерения скорости; устройства сравнения, в которое поступают выходные сигналы от сглаживающего устройства и устройства измерения скорости, а выход связан со входом устройства определения силы тяги или торможения; устройства ограничений, вход которого соединен с выходом устройства измерения скорости, а выход - с устройством выбора минимального значения силы тяги или торможения, с выхода которого выбранное значение силы тяги или торможения поступает на вход исполнительного устройства, выходной сигнал которого воздействует на объект управления - поезд; и устройства измерения скорости.
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2399515C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНОЙ СКОРОСТИ И СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДА ПО УЧАСТКУ ПУТИ | 2003 |
|
RU2265874C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2202481C2 |
| Устройство для автоматической подачи воды в оросительную систему | 1983 |
|
SU1134142A2 |
| US 6353780 В1, 05.03.2002. | |||

