Изобретение относится к области железнодорожного транспорта, а именно - к безопасности управления скоростью движения, обеспечивает повышение безопасности движения за счет задания такого темпа изменения силы тяги или торможения, что возникающие в поезде в процессе движения продольные динамические силы не превышают максимально допустимых значений, что, в свою очередь, ведет к снижению возможности повреждения грузов, подвижного состава и обрывов поездов.
Известен способ регулирования скорости, реализованный на электровозах ВЛ85 и ВЛ65 (Л-1) на основе управления током тяговых двигателей (а следовательно, и силой тяги) с использованием информации о величине заданной и фактической скоростей движения локомотива.
Сигнал, пропорциональный величине заданной скорости, поступает от задатчика скорости контроллера машиниста; сигнал, пропорциональный фактической скорости движения, поступает от блока датчиков скорости.
Величина рассогласования заданной и фактической скоростей поступает на вход регулятора скорости, технически реализованный в виде апериодического звена первого порядка и формирующий на своем выходе сигнал, поступающий на вход контура регулирования тока тяговых двигателей.
Рассмотренный регулятор скорости предназначен для управления силой тяги, развиваемой двигателями, только при поддержании скорости движения на заданном уровне (стабилизации скорости). Во всех остальных режимах движения (разгон, замедление) управление силой тяги осуществляется в ручном режиме путем задания величины максимального тока двигателей. Параметры поезда (вес и длина), а также продольные динамические силы, возникающие в поезде во время движения, не учитываются.
Известен способ регулирования скорости (Л-2), основанный на управлении током тяговых двигателей с использованием информации о величинах заданной и фактической скоростей движения, ускорения (замедления) поезда, а также информации о весе поезда. Реализуемая величина ускорения (замедления) поезда вычисляется на основании информации о величине фактической скорости. Техническая реализация регулятора скорости предусматривает изменение настроек регулятора в зависимости от веса поезда. Для этого используется семейство заранее рассчитанных и введенных в память системы управления настроечных кривых. Отклонение фактических параметров поезда от случаев, для которых выполнен расчет настроечных кривых, а также возможное различное начальное состояние поезда (сжат или растянут) не учитывается.
Известен способ автоматического регулирования скорости движения (Л-3), при реализации которого выполняется ограничение на величину плавности хода в переходных режимах движения, определяемую как первую производную от ускорения. Для этого техническая реализация регулятора содержит сглаживающее звено, включенное между задатчиком скорости и собственно регулятором скорости и реализованное на базе апериодического звена второго порядка. Регулятор скорости, представляющий собой пропорционально-интегрирующий регулятор, дополненный элементом с зоной нечувствительности, формирует на своем выходе кривую заданной силы тяги, соблюдение которой и позволяет обеспечить выполнение ограничений на величину плавности хода. Продольные динамические силы и параметры поезда также не учитываются.
Наиболее близким по технической сущности к заявляемому изобретению является объект, описанный в (Л-3), который и взят за прототип.
В устройстве-прототипе изменение величины сигнала на выходе сглаживающего устройства vзи в режимах тяги или торможения определяется одной из следующих передаточных функций:
где функция f1(t1) соответствует увеличению ускорения, a f2(t1) - уменьшению ускорения. При переходе на выбег из режимов тяги или торможения величина сигнала на выходе сглаживающего устройства определяется следующими законами f3(t1) и f4(t1) соответственно для тяги и торможения:
В выражениях (1) и (2) параметр аз - величина заданного ускорения движения, поступающая от задатчика ускорения контроллера машиниста, Т3 и Т4 - постоянные времени, определяемые на основании аз из условия обеспечения величины плавности хода в переходных режимах движения h=da/dt<0,5-1 м/с3;
Т3=0,8·а3,
Т4=0,7·а3,
а0 - ускорение поезда в момент начала перехода на выбег.
Необходимо отметить, что при нерациональном управлении силой тяги или торможения, реализуемой локомотивом, возможно многократное превышение величинами продольных динамических сил максимально допустимых значений, возникновение рывков и толчков в составе поезда, что может привести к повреждению грузов, а также к обрыву автосцепок.
Техническим результатом, на достижение которого направлено изобретение, является повышение безопасности движения поездов за счет снижения величины продольных динамических сил, действующих в поезде, путем обеспечения заданного закона изменения тягового или тормозного усилия, с учетом длины и веса поезда, а также с учетом состояния поезда (сжат или растянут) на момент начала переходного процесса.
Сущность изобретения состоит в том, что в способе автоматического регулирования скорости движения поезда при изменении величины заданной скорости применяют двухступенчатый способ увеличения заданного значения силы тяги или торможения, реализуемый при помощи промежуточного сглаживающего устройства. Величина первой ступени составляет 0,2-0,4 от максимального значения, а второй ступени - соответственно 0,8-0,6 максимального значения. Максимальная сила тяги Fmax определяется на основе анализа тяговых характеристик локомотива и соответствует точке выхода на автоматическую характеристику. Время задержки между ступенями определяется из условия, что на момент начала переходного процесса поезд сжат, и величины зазоров в межвагонных связях вдоль всего поезда одинаковы и равны среднему значению (Л-4). Для обеспечения наилучших результатов сила тяги или торможения должна возрастать по мере распространения вдоль поезда волны растяжения (сжатия), вызванной изменением тягового (тормозного) усилия.
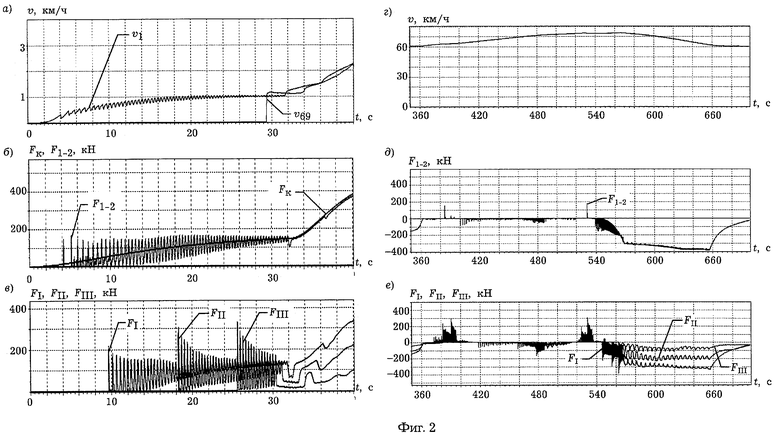
Предлагаемое изобретение иллюстрируется чертежами (фиг.1), на котором изображена функциональная схема системы автоматического управления скоростью движения поезда, реализующая данный принцип.
Функциональная схема содержит задатчик параметров поезда 1, с выхода которого информация о длине поезда N и его весе m поступает на входы «2вх» сглаживающего устройства 6 и устройства задания силы 7. С выходов контура регулирования времени хода системы автоведения 2 (Л-5) и задатчика скорости контроллера машиниста 3 на входы соответственно «2вх» и «1вх» устройства выбора минимального сигнала 5 поступают величины, пропорциональные величинам заданных скоростей движения поезда соответственно vз2 и vз1. С выхода переключателя 4 на вход «5вх» сглаживающего устройства 6 поступает сигнал Выбег о переводе системы в режим выбега. С выхода устройства выбора минимального сигнала 5 сигнал vз, равный минимальному из двух поступающих на его выходы сигналов vз2 и vз1, передается на входы «1вх» сглаживающего устройства 6 и задатчика силы 7; на входы «3вх» которых, в свою очередь, поступает сигнал Fк пр (Bк пр) об ограничениях на характеристики тягового электропривода 12 с выхода блока ограничений 8. С выхода «1вых» сглаживающего устройства 6 сигнал vзи поступает на вход сравнивающего устройства 9, на второй вход которого поступает сигнал  с выхода устройства измерения скорости 14. Величина рассогласования Δv величин vзи и
с выхода устройства измерения скорости 14. Величина рассогласования Δv величин vзи и  , вычисляемая как
, вычисляемая как  , поступает с выхода сравнивающего устройства на вход «1вх» регулятора скорости 10. На второй вход «2вх» регулятора скорости поступает сигнал PowerOff c выхода «2вых» сглаживающего устройства 6, предназначенный для выключения регулятора скорости при переходе в режим выбега. С выхода регулятора скорости сигнал поступает на вход «4вх» сглаживающего устройства 6, а также на вход «1вх» логического блока 11. На второй вход «2вх» логического блока поступает сигнал с выхода устройства задания силы 7. На вход устройства 12, представляющего собой тяговый электропривод локомотива, через логический блок 11 поступает величина заданной силы тяги Fзад (торможения Bзад) или с выхода регулятора скорости 10, если фактическая скорость движения больше, чем 4 км/ч, или с выхода устройства задания силы 7 в том случае, если величина фактической скорости движения меньше, чем 4 км/ч. В том случае, если на тяговый электропривод 12 сигнал поступает с выхода регулятора скорости 10, система автоматического управления работает как замкнутая система регулирования скорости движения. В противном случае система работает с разомкнутой обратной связью, как система регулирования силы тяги. Таким образом, система является самоорганизующейся, изменяющей свою структуру в зависимости от величины скорости движения поезда. Изменение структуры в процессе движения необходимо из-за того, что при малых скоростях движения поезда (меньших, чем 4 км/ч) сигнал обратной связи по скорости содержит значительную погрешность. Выходным сигналом тягового электропривода 12 является величина силы тяги F или торможения В, прикладываемая к поезду 13. Скорость движения поезда vф, реализуемая под действием сил тяги или торможения, измеряется при помощи устройства измерения скорости 14, выходной сигнал которого поступает на вход «3вх» логического блока 11, сравнивающее устройство 9, вход «6вх» сглаживающего устройства 6 и блок ограничений 8.
, поступает с выхода сравнивающего устройства на вход «1вх» регулятора скорости 10. На второй вход «2вх» регулятора скорости поступает сигнал PowerOff c выхода «2вых» сглаживающего устройства 6, предназначенный для выключения регулятора скорости при переходе в режим выбега. С выхода регулятора скорости сигнал поступает на вход «4вх» сглаживающего устройства 6, а также на вход «1вх» логического блока 11. На второй вход «2вх» логического блока поступает сигнал с выхода устройства задания силы 7. На вход устройства 12, представляющего собой тяговый электропривод локомотива, через логический блок 11 поступает величина заданной силы тяги Fзад (торможения Bзад) или с выхода регулятора скорости 10, если фактическая скорость движения больше, чем 4 км/ч, или с выхода устройства задания силы 7 в том случае, если величина фактической скорости движения меньше, чем 4 км/ч. В том случае, если на тяговый электропривод 12 сигнал поступает с выхода регулятора скорости 10, система автоматического управления работает как замкнутая система регулирования скорости движения. В противном случае система работает с разомкнутой обратной связью, как система регулирования силы тяги. Таким образом, система является самоорганизующейся, изменяющей свою структуру в зависимости от величины скорости движения поезда. Изменение структуры в процессе движения необходимо из-за того, что при малых скоростях движения поезда (меньших, чем 4 км/ч) сигнал обратной связи по скорости содержит значительную погрешность. Выходным сигналом тягового электропривода 12 является величина силы тяги F или торможения В, прикладываемая к поезду 13. Скорость движения поезда vф, реализуемая под действием сил тяги или торможения, измеряется при помощи устройства измерения скорости 14, выходной сигнал которого поступает на вход «3вх» логического блока 11, сравнивающее устройство 9, вход «6вх» сглаживающего устройства 6 и блок ограничений 8.
Предлагаемое устройство отличается от прототипа наличием задатчика параметров поезда 1, связи с контуром регулирования времени хода системы автоведения 2, устройства выбора минимального сигнала 5, блока ограничений 8, устройства задания силы 7, логического блока 11; отсутствием блока 10 изменения заданного ускорения (в соответствии с обозначениями, принятыми в (Л-3)), отсутствием рукоятки задатчика ускорения 1 (Л-3), а также тем, что устройство задания силы 7, работающее только в режиме трогания поезда с места и в начале разгона, реализует зависимость между входными и выходными величинами, определяемую следующими выражениями:
Сглаживающее устройство 6 реализуют следующие функциональные зависимости между входными и выходными сигналами при помощи следующих переходных характеристик:
- в режиме тяги или торможения:
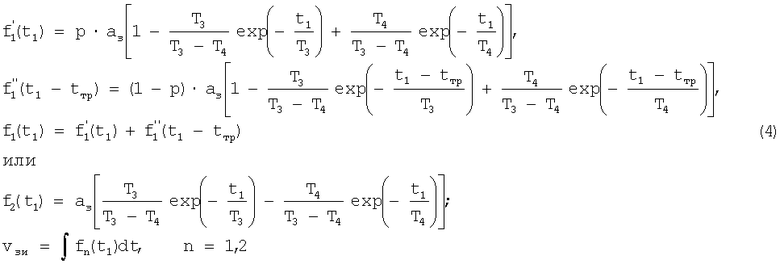
Здесь функция  соответствует первой ступени увеличения ускорения,
соответствует первой ступени увеличения ускорения, 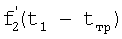 - второй ступени увеличения ускорения, tтр - время задержки между применением первой и второй ступеней ускорения, р - доля максимального ускорения, реализуемая во время выполнения первой ступени; f2(t1) - уменьшению ускорения. Величина ускорения аз определяется следующим образом:
- второй ступени увеличения ускорения, tтр - время задержки между применением первой и второй ступеней ускорения, р - доля максимального ускорения, реализуемая во время выполнения первой ступени; f2(t1) - уменьшению ускорения. Величина ускорения аз определяется следующим образом:

Здесь W0тр - величина основного сопротивления движения при трогании поезда с места, определяемая в соответствии с методикой, представленной в (Л-6).
При переходе на выбег из режимов тяги или торможения величина сигнала на выходе сглаживающего устройства vзи изменяется аналогично рассмотренной ранее в схеме-прототипе (Л-3). Время задержки между применением ступеней увеличения ускорения определяется по формуле:

где N - количество вагонов в поезде, Δ0i, kнi - известные значения средней величины зазора в автосцепке и средней жесткости ветви нагружения характеристики поглощающего аппарата автосцепки соответственно (Л-4); Fmax - величина силы тяги локомотива, реализуемая в процессе пуска поезда. Значения постоянных времени Т3, Т4, T1 и Т2, в выражениях 3 и 4 вычисляются следующим образом:
Т3=4·аз;
Т4=3·аз;
T1=0,245·tтр;
Т2=0,255·tтр.
Выбор значений величин Т3 и Т4 обусловлен требованием выполнения ограничений на величину плавности хода h, определяемой как производную от ускорения движения и ограниченной значением 0,05 м/с3. Значения Т1 и Т2 выбраны исходя из условия завершения процесса нарастания силы тяги  до величины pFmax за время tтр.
до величины pFmax за время tтр.
На фиг 2 (а, б, в, г, д, е) представлены результаты моделирования работы устройства автоматического регулирования скорости движения поезда при управлении грузовым поездом весом 6050 тонн, состоящего из электровоза и 69 груженых вагонов, при движении по участку пути, причем на фиг.2, а-в представлены результаты расчетов для режима трогания поезда с места и начала разгона, а на фиг.2, г-е - для режима включения электрического торможения с целью замедления и стабилизации скорости на спуске. Представлены следующие зависимости: скорость движения локомотива v1(t) и скорость последнего вагона v69(t) поезда (фиг.2, а); сила тяги локомотива Fк(t) и сила в автосцепке между локомотивом и первым вагоном F1-2(t) (фиг.2, б); силы в серединах первой FI(t), второй FII(t) и последней третей поезда FIII(t) (фиг.2, в). На фиг.2, г представлена зависимость скорости движения локомотива v(t), на фиг.2, д-е - обозначения кривых, аналогичные рассмотренным ранее.
Выполненные расчеты показали, что применение способа двухступенчатого изменения силы тяги (торможения) при реализации разгона (торможения) поезда привело к сокращению величин продольных сил в поезде, действующих в переходных режимах (фиг.2, б, в, д, е), в 1,5-2 раза по сравнению с известными устройствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2202481C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ДЛИННОСОСТАВНОГО ГРУЗОВОГО ПОЕЗДА | 2022 |
|
RU2789231C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2014 |
|
RU2551865C1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Устройство для автоматического регулирования скорости локомотива | 1988 |
|
SU1558725A1 |
| СПОСОБ ВОЖДЕНИЯ СОЕДИНЕННЫХ ПОЕЗДОВ | 2007 |
|
RU2354569C2 |
| Устройство для управления скоростью подвижного состава | 1983 |
|
SU1106698A1 |
| УСТРОЙСТВО НЕПРЕРЫВНОГО ТЕМПЕРАТУРНОГО КОНТРОЛЯ И АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ СИЛОВОГО ЭЛЕКТРООБОРУДОВАНИЯ ЭЛЕКТРОВОЗА | 2011 |
|
RU2478046C1 |
| Способ регулирования сил тяги и торможения электроподвижного состава | 1987 |
|
SU1416346A1 |
Изобретение относится к области организации безопасного управления движением грузовых поездов, а именно - к способу автоматического регулирования скорости движения поезда и устройству для его реализации. При любом изменении величины заданной скорости движения устройство задает такой темп изменения фактической скорости, что величины продольных динамических сил, которые возникают в поезде в переходных режимах движения, не превышают их допустимых значений. Система содержит задатчик параметров поезда, задатчик скорости контроллера машиниста, выход контура регулирования времени хода, переключатель, устройство выбора минимального сигнала, сглаживающее устройство, сравнивающее устройство, регулятор скорости, устройство задания силы, логический блок, блок ограничений, тяговый электропривод, устройство измерения скорости. Предлагаемая система является самоорганизующейся. Технический результат - повышение безопасности движения поездов за счет снижения величины продольных динамических сил, действующих в поезде, путем обеспечения заданного закона изменения тягового или тормозного усилия, с учетом длины и веса поезда, а также с учетом состояния поезда на момент начала переходного процесса. 2 н.п. ф-лы, 2 ил.
1. Способ автоматического регулирования скорости движения поезда, осуществляемый путем задания требуемого значения скорости движения, отличающийся тем, что используют двухступенчатый режим плавного изменения заданного ускорения (замедления) движения, а следовательно, и силы тяги (торможения), при малых скоростях движения, когда сигнал обратной связи по скорости содержит значительную погрешность, используют устройство задания силы, которое реализует зависимость между входными и выходными величинами на основании информации о доле максимального ускорения, реализуемого во время выполнения первой ступени, величине силы тяги локомотива, реализуемой в процессе пуска поезда, постоянных времени устройства задания силы и величине времени задержки между применением ступеней, при этом зависимость между входными и выходными величинами определяется следующими выражениями:
 ,
,
 ,
,

где p - доля максимального ускорения, реализуемого во время выполнения первой ступени; Fmax - величина силы тяги локомотива, реализуемой в процессе пуска поезда; Т1, Т2 - постоянные времени устройства задания силы; tTP - время задержки между применением первой и второй ступеней, которое вычисляют на основании информации о количестве вагонов в поезде, среднем значении величины зазора в автосцепках поезда, среднем значении жесткости ветви нагружения поглощающего аппарата автосцепки, величины силы тяги локомотива, реализуемой в процессе пуска поезда, а также величины ускорения, при этом величину задержки между ступенями определяют по формуле:
 ,
,
где N - количество вагонов в поезде, Δ0i, kнi - значения средней величины зазора в автосцепке и средней жесткости ветви нагружения характеристики поглощающего аппарата автосцепки соответственно; а3=(Fmax-W0ТР)/m - величина ускорения; W0TP - величина основного сопротивления движения при трогании поезда с места; m - вес поезда; причем при скоростях движения, когда сигнал обратной связи по скорости содержит незначительную погрешность, используют сглаживающее устройство, реализующее функциональные зависимости между входными и выходными сигналами на основании информации о доле максимального ускорения, реализуемого во время выполнения первой ступени, величине ускорения, постоянных времени сглаживающего устройства, при помощи следующих переходных характеристик:
 ,
,
 ,
,

или
 ;
;
 n=1,2
n=1,2
где Т3, T4 - постоянные времени сглаживающего устройства; при этом значения постоянных времени Т1, Т2, Т3 и Т4, вычисляются следующим образом: Т1=0,245tТР, Т2=0,245tTP, Т3=4а3, Т4=3а3.
2. Устройство автоматического регулирования скорости движения поезда, состоящее из сглаживающего устройства, часть входов которого соединена с выходами переключателя, регулятора скорости и устройства измерения скорости, а выходы - с одними из входов сравнивающего устройства и регулятора скорости, оставшийся вход сравнивающего устройства соединен с выходом устройства измерения скорости, а выход - с другим входом регулятора скорости тягового электропривода, выходной сигнал которого воздействует на поезд, изменяя его скорость движения, которая, в свою очередь, измеряется при помощи устройства измерения скорости, отличающееся тем, что оно является самоорганизующимся, в него дополнительно введен задатчик параметров поезда, выход которого подключен к одному из входов сглаживающего устройства и устройства задания силы, оставшиеся входы которого, в свою очередь, подключены к выходам блока ограничений и устройства выбора минимальных сигналов; логический блок, входы которого соединены с выходом регулятора скорости, устройством задания силы и устройством измерения скорости, а выход - со входом тягового электропривода; блок ограничений, своим входом соединенный с устройством измерения скорости, а выходом - со входами сглаживающего устройства и устройства задания силы; устройство выбора минимального сигнала, на входы которого поступают величины от задатчика скорости контроллера машиниста и с выхода контура регулирования времени хода системы автоведения, а выход соединен со входом сглаживающего устройства и устройством задания силы.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2202481C2 |
| Устройство для автоматической подачи воды в оросительную систему | 1983 |
|
SU1134142A2 |
| US 6353780 B1, 05.03.2002 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПОДВИЖНЫМ СОСТАВОМ | 2000 |
|
RU2179515C2 |

