(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
1
Изобретение относится к автоматическому вождению электровоза, преимущественно шахтного, и предназначено для регулирования сил тяги и торможения электровоза в режимах растягивания и сжатия состава.
Известно устройство для автоматического управления электровозом, содержащее приемник командной скорости, выход которого соединен со входом формирователя заданной скорости, подключенного выходом к одному из входов первого блока сравнения, другой вход которого соединен с датчиком фактической скорости, а выход - со входом тиристорного преобразователя, выход которого подключен к обмоткам тяговых двигателей, датчик тока тяговых двигателей, соединенный с одним из входов порогового элемента, другой вход которого подключен к выходу второго блока сравнения, один и другой входы которого подключены к соответствующим датчикам скорости колесных пар, а третий - к датчику фактической скорости, и ограничитель 1.
Недостатком такого устройства является формирование пониженного тормозноЭЛЕКТРОВОЗОМ
го усилия лищь в режиме ступенчатого снижения командной скорости, причем его величина не связана с величиной дина.мических усилий, образующихся в составе. Кроме того, при трогании сжатого состава и аварийном торможении прикладываются предельные тяговые и тормозные усилия. Это приводит к повыщенному износу буферно-сцепных устройств подвижного состава и сходу вагонеток с рельс.
Цель изобретения - повыщение надежности устройства.
Указанная цель достигается тем, что устройство снабжено датчиком ускорения, полключенным через ограничитель к другому входу порогового элемента, выход которого соединен с управляющим входом тиристорного преобразователя.
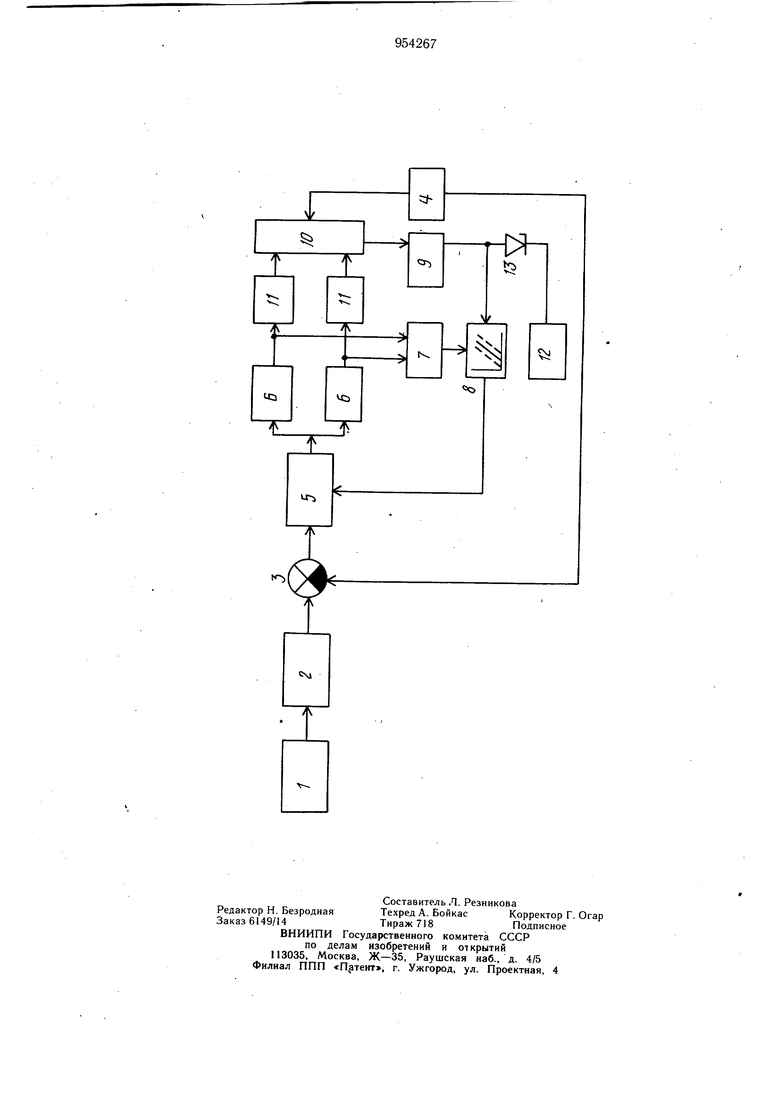
На чертеже показана блок-схема предлагаемого устройства.
Устройство содержит приемник 1 команл20 ной скорости, выход которого через формирователь 2 подключен к одному ii3 входов блока 3 сравнения, другой вход которого подсоединен к датчику 4 фактической скорости поезда, а вы ход - к тиристорном преобразователю 5, соединенному с обмотками тяговых двигателей 6. Датчик 7 тока тяговых двигателей подключен к одному из входов порогового элемента 8, другой вход которого соединен через усилитель 9 с выводом блока 1 сравнения, одни входы которого подключены к выходам датчиков 11 скорости колесных пар, а другой - с датчиком 4 фактической скорости. Устройство содержит датчик 12 ускорения, подключенный через ограничитель - --- ..™. Q 13 ко второму входу порогового элемента 8, выход которого соединен с управляющим входом тиристорного преобразователя 5. При этом датчик 12 ускорения может быть выполнен на акселерометре, а в качестве ограничителя 13-на стабилитроне. При трогании сжатого поезда с места разность заданной и фактической скоростей, выделенная блоком 3 сравнения, формирует команду тиристорному преобразователю 5 на пуск тяговых двигателей, Так как скольжение колес отсутствует, то ставка порогового элемента соответствует максимальному коэффициенту сцепления. С выхода порогового элемента на управляющий вход тиристорного преобразователя 5 подается сигнал предельного по сцеплению тягового усилия. поэтому пуск тяговых двигателей начинается с пределвной силой тяги. В момент полного выбора зазора между электроводом и первой вагонеткой образуется динамическое усилие в первой сцепке. Это приводит к импульсу замеделения электровоза. Напряжение, пропорциональное величине замедление, снимается с акселерометра 12 и подается на управляющий вход порогового элемента 8, уменьщая его уставку. С выхода порогового элемента 8 на управляющий вход тиристорного преобразователя 5 подается сигнал на снижение тягового усилия. Тем самым сила тяги, формируемая преобразователем 5, снижается пропорционально величине замедления электровоза на период каждого удара в составе. Это приводит к снижению динамических усилий в буферносцепных устройствах и уменьщению их износа. Аналогично устройство работает при торможении растянутого поезда. Соединение выхода порогового элемента 8 с управляющим выходом тиристорного преобразователя позволяет обеспечить независимость предельных сил тяги и торможения от изменений фактической скорости в процессе пуска и торможения. Стабилитрон 13 введен для отключения сигналов акселерометра после полного сжатия или растягивания поезда. Порог его включения выбирается выше выходного напряжения акселерометра, соответствующего предельному по сцеплению ускорению растянутого и замедлению сжатого поезда. Акселерометр измеряет абсолютную величину ускорения электровоза, Преимуществом предлагаемого устройства является снижение тягового и тормозного усилий электровоза на период фиксаций и удара в составе акселерометром электровоза. Это позволяет предотвратить сход вагонеток и за счет снижения динамических усилий уменьщить износ буферно-сцепных устройств. Экономический эффект по ориентировоч-, ным расчетам для одного поезда составляет 5-6 тыс. руб. в год. Формула изобретения Устройство для автоматического управления электровозом, содержащее приемник командной скорости, выход которого соединен с входом формирователя заданной скорости, подключенного выходом к одному из входов первого блока сравнения, другой вход которого соединен с датчиком фактической скорости, а выход - с входом тиристорного преобразователя, выход которого подключен к обмоткам тяговых двигателей, датчик тока тяговых двигателей, соединенный с одним из входов порогового элемента, другой вход которого подключен к выходу второго блока сравнения, один из входов которого подключен к соответствующи.м датчикам скорости колесных пар, а третий - к датчику фактической скорости, и ограничитель, отличающееся тем, что, с целью повыщения надежности, оно снабжено датчиком ускорения, подключенным через ограничитель к другому входу порогового элемента, выход которого соединен с управляющим входом тиристорного преобразователя. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2520177/11, кл. В 60 L 3/10, 06.09.77.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления электровозом | 1981 |
|
SU1024314A1 |
| Устройство для автоматическогоупРАВлЕНия элЕКТРОВОзОМ | 1977 |
|
SU802099A1 |
| Устройство для автоматического управления электровозом | 1983 |
|
SU1237491A1 |
| Устройство для автоматического управления электроподвижным составом | 1981 |
|
SU1000315A2 |
| Устройство для торможения электровоза | 1982 |
|
SU1060514A1 |
| Устройство для управления рельсовым тормозом | 1982 |
|
SU1011418A1 |
| Устройство для торможения электровоза | 1981 |
|
SU962043A1 |
| Устройство управления рельсовым тормозом | 1981 |
|
SU1011417A2 |
| Способ регулирования сил тяги и торможения электроподвижного состава | 1987 |
|
SU1416346A1 |
| Устройство для автоматического управления электровозом | 1986 |
|
SU1402449A1 |