Изобретение относится к области автоматизации механизмов средствами электропривода и может быть использовано для эффективного управления остановом механизмов при использовании одного концевого выключателя на участке замедления перед остановкой.
Известен способ управления остановом механизма с электроприводом и использованием двух концевых выключателей, один из которых дает сигнал на предварительное замедление до пониженной скорости, а второй -на окончательную остановку [1].
Недостатком данного технического решения является отсутствие условий для минимизации времени остановки, из-за того, что не предполагается изменение закона торможения в зависимости от величины начальной скорости остановки VH и, кроме того, не предполагается использование максимально допустимого темпа замедления. Вследствие этого не достигается максимально возможная производительность приводимого в движение механизма.
Наиболее близким по технической сущности к предлагаемому изобретению является способ управления электроприводом для остановки механизма при двух конечных выключателях [2], согласно которому определяется отрезок пути механизма до остановки и вводится закон изменения скорости в процессе останова на отрезке пути между концевыми выключателями предварительного замедления и окончательной остановки, задаваемый устройством управления согласно предложенному закону, при котором сигнал на торможение механизма подается не сразу после срабатывания концевого выключателя предварительного замедления, а через определенное время, зависящее от различных физических факторов данного процесса.
Технической задачей предлагаемого изобретения является исключение из системы концевого выключателя окончательной остановки с целью упрощения конструкции, снижения числа компонентов и минимизации времени монтажа и наладки. Решение этой задачи предполагает использование новых функциональных и расчетных зависимостей, реализуемых устройством управления, в которых задается величина пути от концевого выключателя, определяющего начало остановки до точки полного останова механизма.
Предлагается способ управления электроприводом для остановки механизма при использовании концевого выключателя, определяющего начало остановки на заранее заданном участке пути, с применением устройства управления, которое задает закон изменения скорости, обеспечивающий замедление электропривода на заданном отрезке пути с начальной скорости согласно выражению:
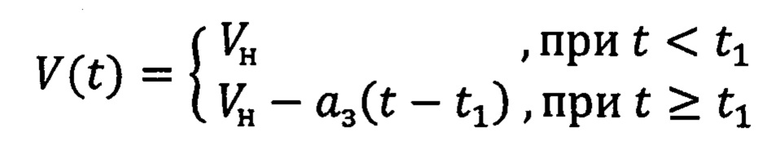
в котором:
 - текущее время, отсчитываемое с момента срабатывания концевого выключателя определяющего начало процесса остановки;
- текущее время, отсчитываемое с момента срабатывания концевого выключателя определяющего начало процесса остановки;
 - скорость механизма в начале процесса остановки, определяемая текущими условиями работы механизма, известная по результатам текущих измерений скорости механизма;
- скорость механизма в начале процесса остановки, определяемая текущими условиями работы механизма, известная по результатам текущих измерений скорости механизма;
 - максимально допустимый темп замедления, известный из конструктивных особенностей механизма и его электропривода,
- максимально допустимый темп замедления, известный из конструктивных особенностей механизма и его электропривода,
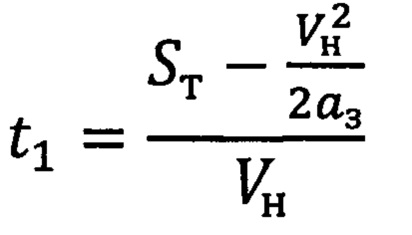
 - время, в течение которого механизм продолжает работу после момента срабатывания концевого выключателя начала остановки до начала торможения, отличающийся тем, что расстояние между концевым выключателем, определяющим начало остановки, и точкой остановки механизма, определяют согласно выражению:
- время, в течение которого механизм продолжает работу после момента срабатывания концевого выключателя начала остановки до начала торможения, отличающийся тем, что расстояние между концевым выключателем, определяющим начало остановки, и точкой остановки механизма, определяют согласно выражению:

в котором:
 - расстояние между концевым выключателем, определяющим начало остановки и точкой окончательного останова, представляющее собой задаваемый отрезок пути механизма при остановке;
- расстояние между концевым выключателем, определяющим начало остановки и точкой окончательного останова, представляющее собой задаваемый отрезок пути механизма при остановке;
 - максимально возможная скорость механизма в начале процесса остановки, задаваемая из условий работы механизма.
- максимально возможная скорость механизма в начале процесса остановки, задаваемая из условий работы механизма.
При этом в законе изменения скорости, формируемым устройством управления, значение параметра  определяют как:
определяют как:
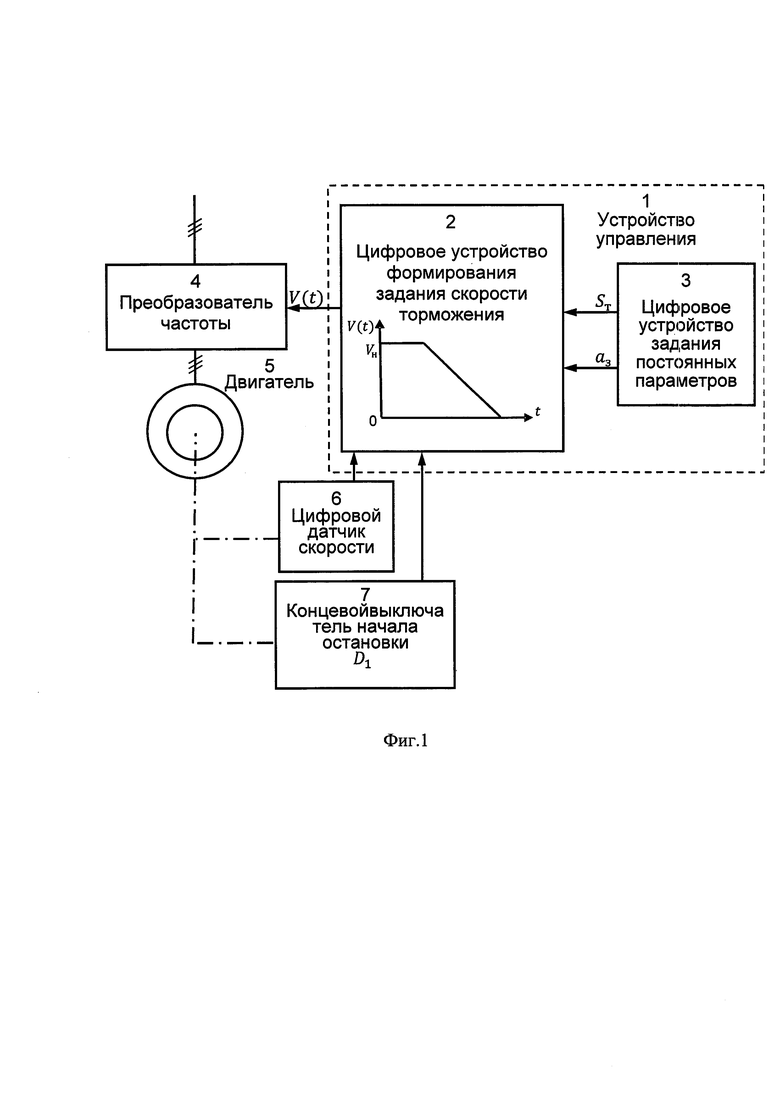
На фиг.1 изображена функциональная схема устройства останова.
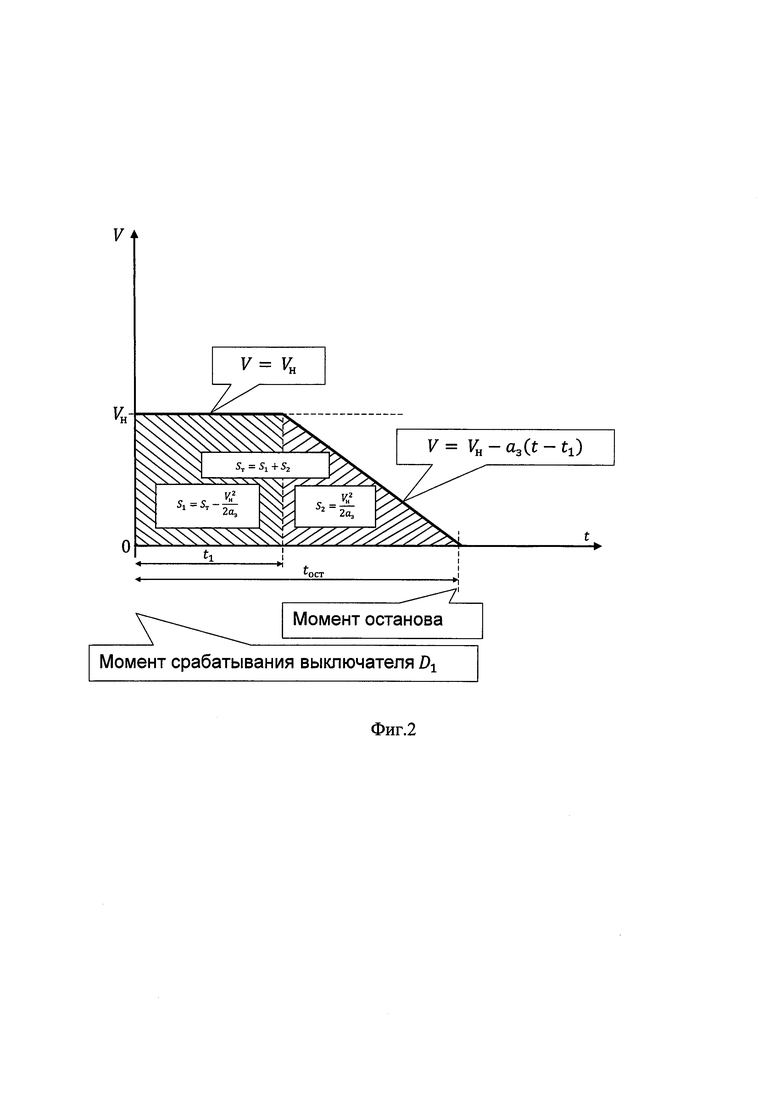
На фиг.2 изображен закон задания скорости при останове за минимальное время.
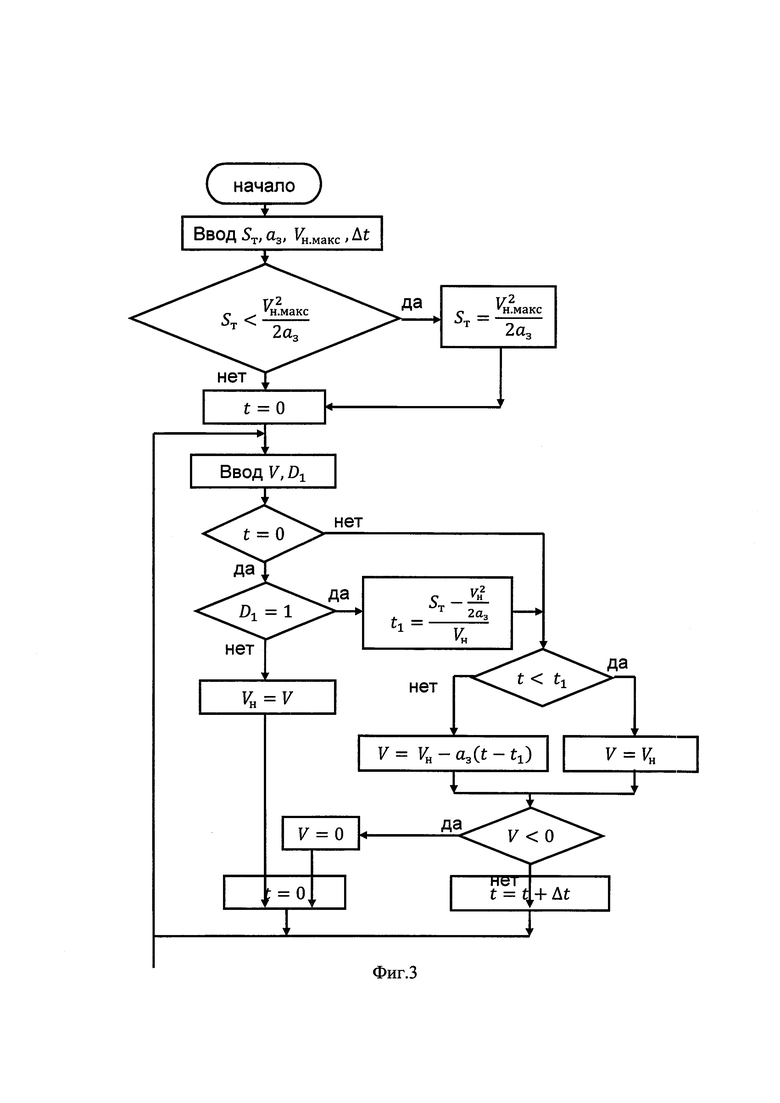
На фиг.3 представлен алгоритм работы устройства управления.
Известная система характеризуется тем, что в ней задается закон изменения скорости перемещения механизма, при котором используют два концевых выключателя: предварительного замедления и окончательного останова, находящихся на определенном расстоянии друг от друга, и производится процесс торможения по заранее заданному закону таким образом, чтобы к моменту достижения механизмом второго концевого выключателя его скорость была бы близка к нулевой.
Отличие реализации предлагаемого способа управления состоит в отсутствии на участке замедления второго концевого выключателя, что позволяет при предлагаемом законе изменения скорости перемещения механизма оперативно изменять точку окончательного останова путем изменения задаваемого в устройство управления значения ST.
Функциональная схема устройства, реализующего предлагаемый способ останова, приведена на фиг.1. В схеме имеется устройство управления 1 состоящее из цифрового устройства формирования задания скорости торможения 2 и цифрового устройства задания постоянных параметров 3, выходы которого соединены со входами цифрового устройства формирования задания скорости торможения 2. Выходной сигнал цифрового устройства формирования задания скорости 2 (V(t), соединен с управляющим ходом преобразователя частоты 4, питающего двигатель 5. Выходы цифрового датчика скорости 6 и концевого выключателя D1 начала остановки 7 соединены со входами цифрового устройства формирования задания скорости торможения 2.
Закон изменения задания скорости во времени V (t) при торможении, обеспечиваемый устройством управления 1, представлен на фиг.2. По предложенному алгоритму, приведенному на фиг.3, формируется закон изменения задания скорости, показанный на фиг.2. Такой алгоритм обеспечивает торможение электропривода с текущей начальной скорости VH до нулевой за минимальное время. При этом учитывается ограничение по темпу замедления а3.
Расстояние ST от концевого выключателя, определяющего начало остановки до точки окончательной остановки должно численно равняться тормозному пути, определяемому как интеграл по времени от текущей скорости V(t)n численно равный площади между графиком скорости и осью времени. При этом в законе изменения задания скорости учтены следующие ограничения: скорость V(t) не должна увеличиваться в процессе торможения, и темп замедления не должен превосходить максимальную величину а3.
С учетом отмеченных ограничений для получения минимального времени торможения закон изменения скорости должен состоять из двух участков (фиг.2). На первом участке задание скорости постоянно, а на втором - задание скорости уменьшается с максимально допустимым темпом замедления а3. Путь, пройденный на втором участке, численно равен площади между графиком задания скорости V(t) и осью времени, и вычисляется по выражению
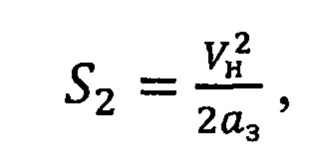
соответственно путь, пройденный на первом участке, равен
а время прохождения первого участка
Любое отклонение закона изменения задания скорости в сторону ее уменьшения приведет к увеличению времени останова, так как тормозной путь, численно равный площади между графиком скорости и осью времени, должен остаться тем же самым. С другой стороны, любое увеличение задания скорости невозможно в силу наложенных ограничений на нее и темпа замедления. Таким образом, останов по предлагаемому закону задания скорости происходит за минимально возможное при имеющихся ограничениях время.
Устройство управления остановом по предлагаемому способу работает следующим образом. Сначала, согласно алгоритму работы устройства управления 1 (фиг.3) определяется текущее время торможения t, отсчитываемое с момента срабатывания концевого выключателя D1, определяющего начало остановки. Если концевой выключатель D1, определяющий начало остановки, еще не сработал (D1=0), то начальная скорость замедления приравнивается к текущей скорости VH=V(t) и отсчет времени торможения не начинается, т.е. t=0. Если конечный выключатель D1, определяющий начало остановки, сработал (D1 ≠ 0), то согласно выражению
вычисляется время движения механизма со скоростью VH, после чего по выражению

вычисляется заданная скорость V(t). Если заданная скорость V(t)<0, то обнуляются задание скорости V(t)=0 и текущее время торможения
Иначе, текущее время увеличивается на интервал дискретности  Далее устройство управления 1, вычисляющее закон изменения задания скорости, переходит на следующий цикл работы.
Далее устройство управления 1, вычисляющее закон изменения задания скорости, переходит на следующий цикл работы.
Если требуется изменить расстояние между концевым выключателем, определяющим начало остановки и окончательного останова, представляющее собой задаваемый отрезок пути механизма при остановке, то необходимо задать новое значение  большее, чем определяемое по формуле
большее, чем определяемое по формуле
Для этого в алгоритме (фиг.3) проверяется заданное значение  и, если оно меньше, чем вычисленное по вышеприведенной формуле, то берется его значение, определяемое по вышеприведенной формуле, а иначе, принимается равным заданному значению.
и, если оно меньше, чем вычисленное по вышеприведенной формуле, то берется его значение, определяемое по вышеприведенной формуле, а иначе, принимается равным заданному значению.
Подчеркнем, что имеется возможность оперативно изменять место останова механизма без изменения местоположения концевого выключателя, определяющего начало замедления, при отсутствии концевого выключателя окончательной остановки.
СПИСОК ЛИТЕРАТУРЫ
1. Марголин Ш.М. Точная остановка электроприводов, Москва, Энергоатомиздат, 1984, стр. 104).
2. Патент на изобретение №2741337, БИ-3-25, 01.2021.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ДЛЯ ТОЧНОЙ ОСТАНОВКИ МЕХАНИЗМА ПРИ ДВУХ КОНЦЕВЫХ ВЫКЛЮЧАТЕЛЯХ | 2019 |
|
RU2741337C1 |
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Электропривод шахтной подъемной машины | 1986 |
|
SU1390754A1 |
| Устройство для точного останова электропривода | 1988 |
|
SU1614086A2 |
| СПОСОБ НЕЧЕТКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВИЖНОГО СОСТАВА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА С ВОЗМОЖНОСТЬЮ ПЛАВНОГО УПРАВЛЕНИЯ ТЯГОЙ | 2004 |
|
RU2296357C2 |
| Устройство формирования программы работы электропривода шахтной подъемной установки | 1987 |
|
SU1578077A1 |
| Устройство для точного останова электропривода | 1984 |
|
SU1182618A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| Позиционный электропривод постоянного тока | 1981 |
|
SU1072223A1 |
Изобретение относится к электротехнике. Технический результат заключается в упрощении конструкции, снижении времени монтажа и наладки. Технический результат достигается за счет того, что используется только один концевой выключатель, определяющий начало остановки, что позволяет при предлагаемом законе изменения скорости перемещения механизма оперативно изменять точку окончательного останова путем изменения задаваемого в устройство управления значения расстояния  между концевым выключателем, определяющим начало остановки, и точкой окончательного останова. Закон изменения скорости, формируемый устройством управления, обеспечивает торможение электропривода с текущей начальной скорости
между концевым выключателем, определяющим начало остановки, и точкой окончательного останова. Закон изменения скорости, формируемый устройством управления, обеспечивает торможение электропривода с текущей начальной скорости  до нулевой за минимальное время. Если требуется изменить расстояние, представляющее собой задаваемый отрезок пути механизма при остановке, то необходимо задать новое значение, большее, чем определяемое по формуле:
до нулевой за минимальное время. Если требуется изменить расстояние, представляющее собой задаваемый отрезок пути механизма при остановке, то необходимо задать новое значение, большее, чем определяемое по формуле:  . Для этого в алгоритме проверяется заданное значение и если оно меньше, чем вычисленное по вышеприведенной формуле, то берется его значение, определяемое по вышеприведенной формуле, а иначе принимается равным заданному значению. 3 ил.
. Для этого в алгоритме проверяется заданное значение и если оно меньше, чем вычисленное по вышеприведенной формуле, то берется его значение, определяемое по вышеприведенной формуле, а иначе принимается равным заданному значению. 3 ил.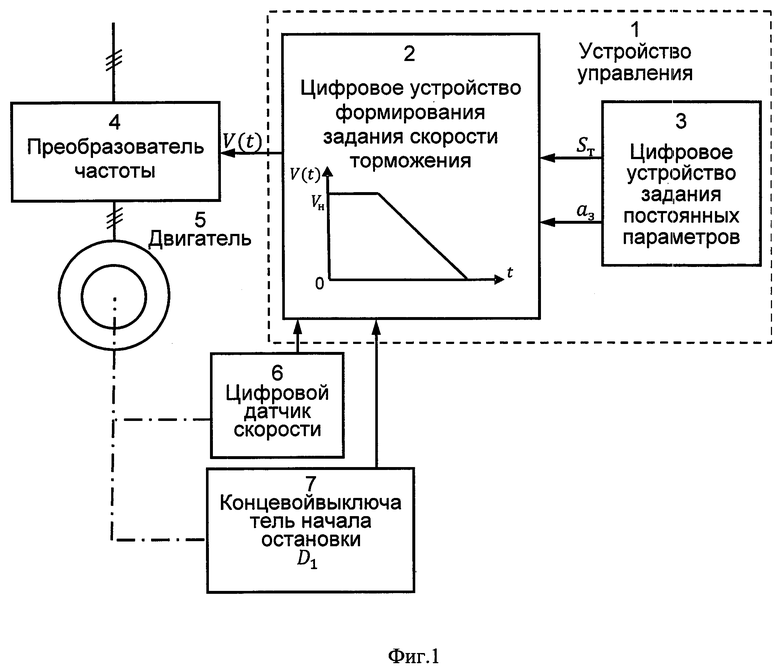
Способ управления электроприводом для остановки механизма при использовании концевого выключателя, определяющего начало остановки на заранее заданном участке пути, с применением устройства управления, которое задает закон изменения скорости, обеспечивающий замедление электропривода на заданном отрезке пути с начальной скорости согласно выражению:
 ,
,
в котором:
 - текущее время, отсчитываемое с момента срабатывания концевого выключателя, определяющего начало процесса остановки;
- текущее время, отсчитываемое с момента срабатывания концевого выключателя, определяющего начало процесса остановки;
 - скорость механизма в начале процесса остановки, определяемая текущими условиями работы механизма, известная по результатам текущих измерений скорости механизма;
- скорость механизма в начале процесса остановки, определяемая текущими условиями работы механизма, известная по результатам текущих измерений скорости механизма;
 - максимально допустимый темп замедления, известный из конструктивных особенностей механизма и его электропривода;
- максимально допустимый темп замедления, известный из конструктивных особенностей механизма и его электропривода;
 - время, в течение которого механизм продолжает работу после момента срабатывания концевого выключателя начала остановки до начала торможения,
- время, в течение которого механизм продолжает работу после момента срабатывания концевого выключателя начала остановки до начала торможения,
отличающийся тем, что расстояние между концевым выключателем, определяющим начало остановки, и точкой остановки механизма определяют согласно выражению:
 ,
,
в котором:
 - расстояние между концевым выключателем, определяющим начало остановки, и точкой окончательного останова, представляющее собой задаваемый отрезок пути механизма при остановке;
- расстояние между концевым выключателем, определяющим начало остановки, и точкой окончательного останова, представляющее собой задаваемый отрезок пути механизма при остановке;
 - максимально возможная скорость механизма в начале процесса остановки, задаваемая из условий работы механизма, при этом в законе изменения скорости, формируемым устройством управления, значение параметра t1 вычисляют как
- максимально возможная скорость механизма в начале процесса остановки, задаваемая из условий работы механизма, при этом в законе изменения скорости, формируемым устройством управления, значение параметра t1 вычисляют как
 .
.
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ДЛЯ ТОЧНОЙ ОСТАНОВКИ МЕХАНИЗМА ПРИ ДВУХ КОНЦЕВЫХ ВЫКЛЮЧАТЕЛЯХ | 2019 |
|
RU2741337C1 |
| Электропривод шахтной подъемной машины | 1986 |
|
SU1390754A1 |
| Устройство для точного останова электропривода | 1988 |
|
SU1614086A2 |
| Привод кормораспределителя | 1984 |
|
SU1264880A1 |
| КR 20100027284 А, 11.03.2010. | |||

