Настоящее изобретение относится к телескопическому погрузчику, или «телехендлеру», оборудованному системой управления движением.
Более конкретно, изобретение предназначено главным образом для использования с поворотными телехендлерами, хотя концепция изобретения также применима к другим типам самоходных машин.
Известны телехендлеры предшествующего уровня техники, состоящие из транспортного средства, оборудованного «рамой», или опорной частью, перемещающейся на колесах, содержащего поворотную платформу, на которой, в свою очередь, устанавливаются кабина водителя и подвижная стрела, которая может выдвигаться телескопически.
На дальнем конце стрелы имеется устройство для подъема или перемещения грузов, такое как, например, вилы, клеть, устройство бокового перемещения, лебедка и т.д.
При использовании на строительных площадках или в сельском хозяйстве операторам часто необходимо выполнять повторяющиеся операции или перемещать груз в точных пространственных границах, чтобы избежать помех элементам окружающей среды.
Например, если операции, для которых выделяется телехендлер, состоят в перемещении одного за другим множества поддонов из зоны, в которой они накапливаются, в пункт назначения, который находится на другой высоте, оператор должен циклически воздействовать на приводы стрелы устройства и платформы таким образом, чтобы перемещать вилы из той же начальной точки, в которой они находятся в положении для введения в новый поддон, подлежащий перемещению, в конечный пункт, где поддон может быть освобожден, например, чтобы дать возможность оператору выполнять ручную загрузку.
В этом случае, хотя операции являются сами по себе повторяющимися и не особенно сложными, оператор должен выполнять команды очень скрупулезно и с большой концентрацией, чтобы избежать опасных ситуаций, например падения груза или столкновения со стрелой или оборудованием других транспортных средств или изделиями, присутствующими в окружающей зоне, а также для предотвращения ненужных или чересчур избыточных движений, которые приводят к замедлению и, следовательно, к снижению производительности.
В другом примере, с другой стороны, может случиться так, что грузы должны перемещаться в разных положениях, но в соответствии с предварительно заданным направлением или траекторией или переменными траекториями, но только внутри четких границ пространства, окружающего телехендлер; например, это может быть востребовано во избежание риска того, что устройство ударится о стены зданий, другие рабочие средства, такие как краны или другие телехендлеры, или из-за наличия транзитных зон пешеходов или автомобилей.
Тот факт, что границы или траектории, которые ограничивают движение стрелы и устройства, определены четко и являются постоянными, не позволяют оператору упростить его/ее работу или постоянно обходиться без максимального внимания и надежности, потому что, опять же, физическая безопасность людей, присутствующих на рабочей площадке, целостность средств и окружающих конструкций и эффективность самих операций зависят от движений, которые оператор передает исполнительным механизмам с помощью команд в кабине, например, с помощью джойстика.
Поэтому на рынке существует долгосрочная и острая потребность в повышении эффективности и облегчении оператору телехендлера выполнения операций, которые являются повторяющимися или имеют ограничения из-за обстановки, в которой они выполняются.
Техническая цель, составляющая основу настоящего изобретения, состоит в том, чтобы предложить телехендлер, оборудованный системой управления перемещениями, которая удовлетворяет вышеописанной потребности.
Указанная цель достигается изобретением по пункту 1 формулы.
Дополнительные характеристики и преимущества настоящего изобретения станут более очевидными из неограничивающего описания предпочтительного, но неисключительного варианта осуществления предлагаемого телехендлера, как проиллюстрировано на прилагаемых чертежах, на которых:
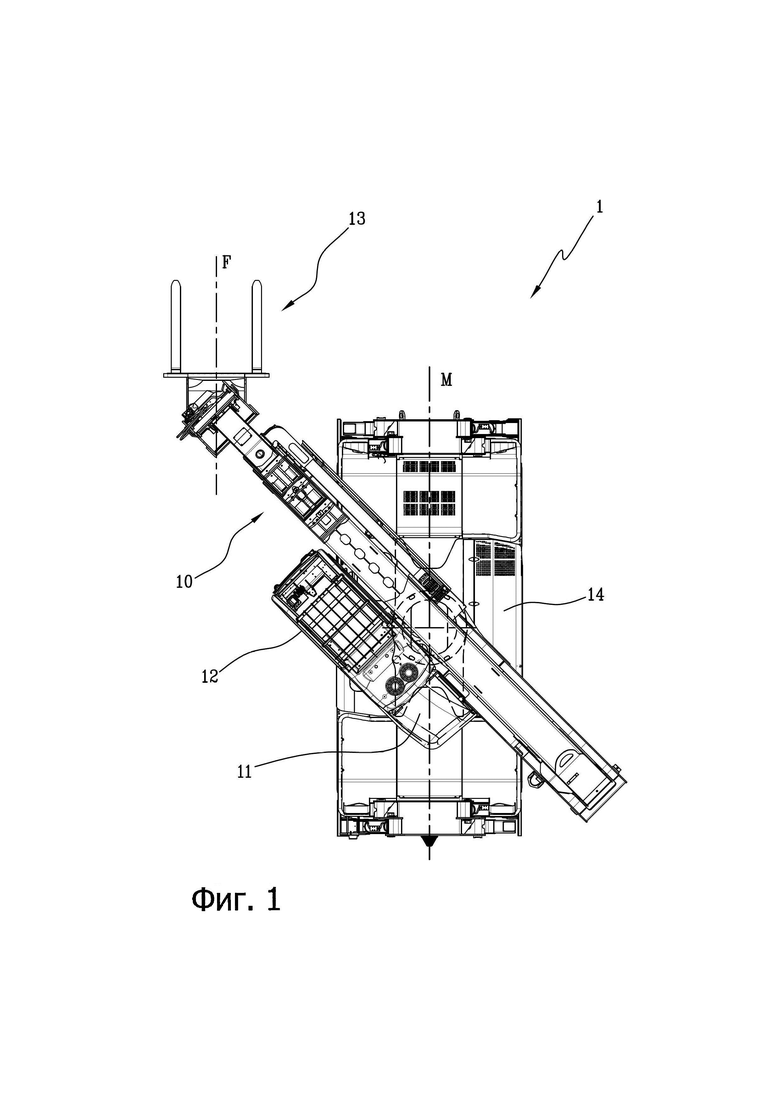
фиг. 1 вид сверху телехендлера согласно изобретению в возможной рабочей конфигурации, управляемой предложенной системой управления;
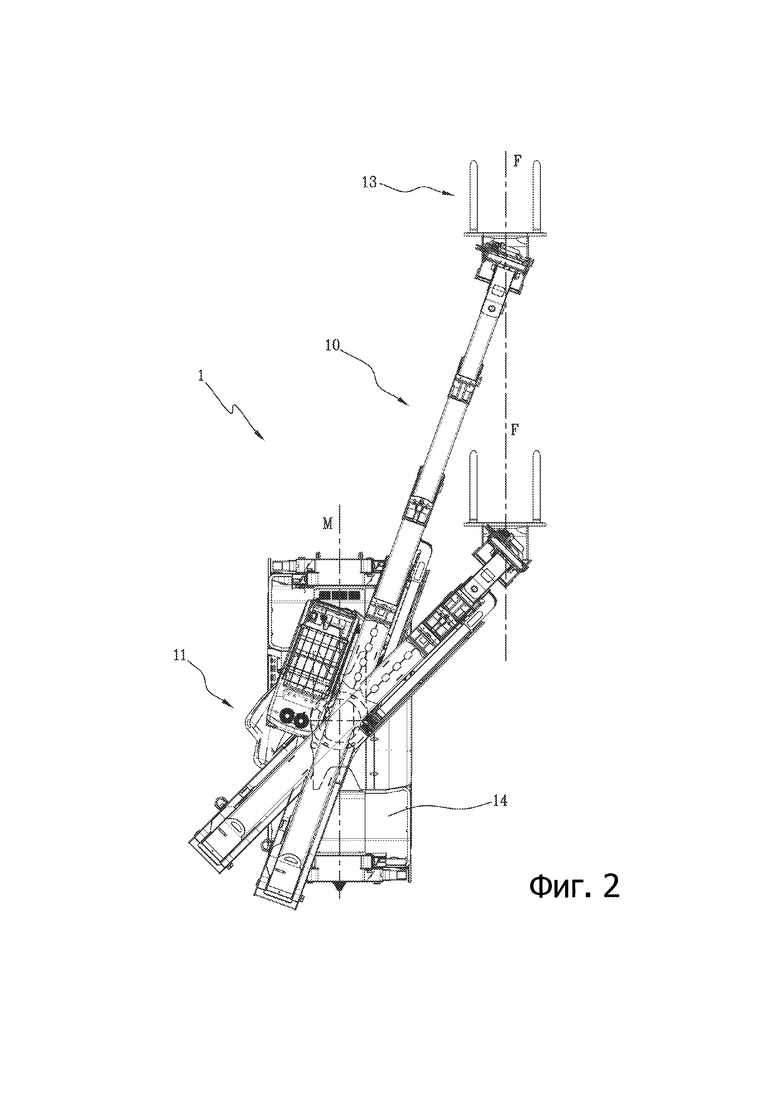
фиг. 2 - вид сверху телехендлера, показанного на фиг. 1, на котором показаны возможные перемещения, управляемые системой управления;
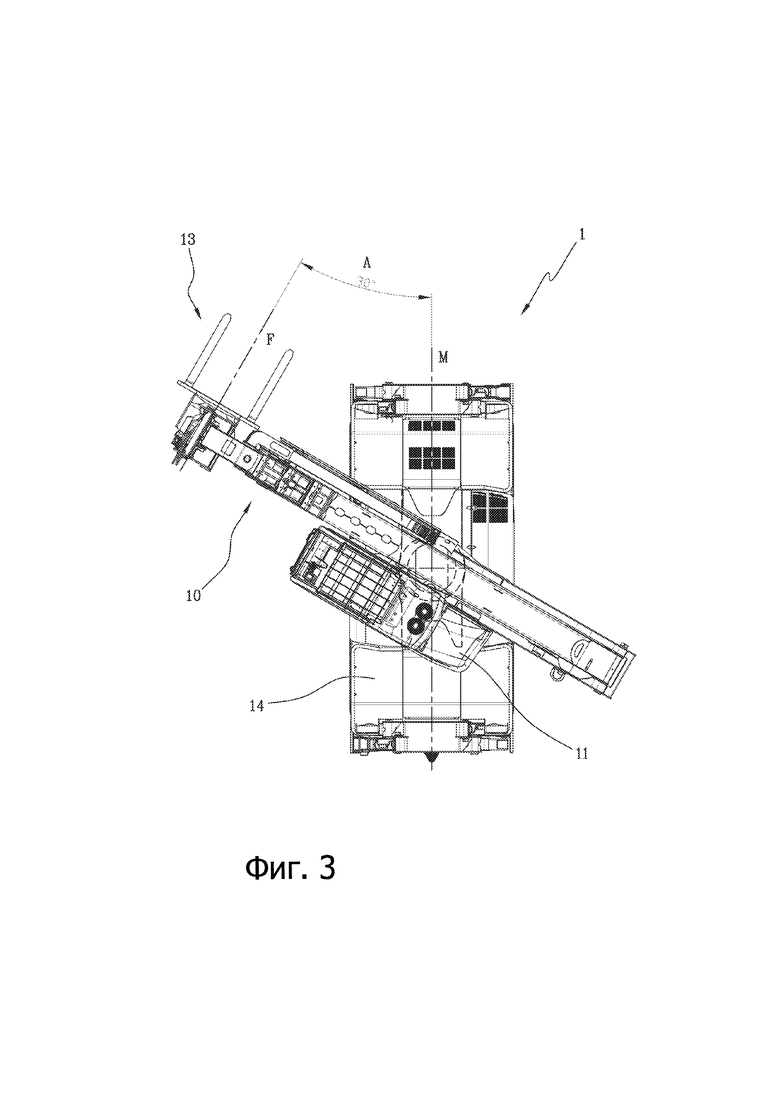
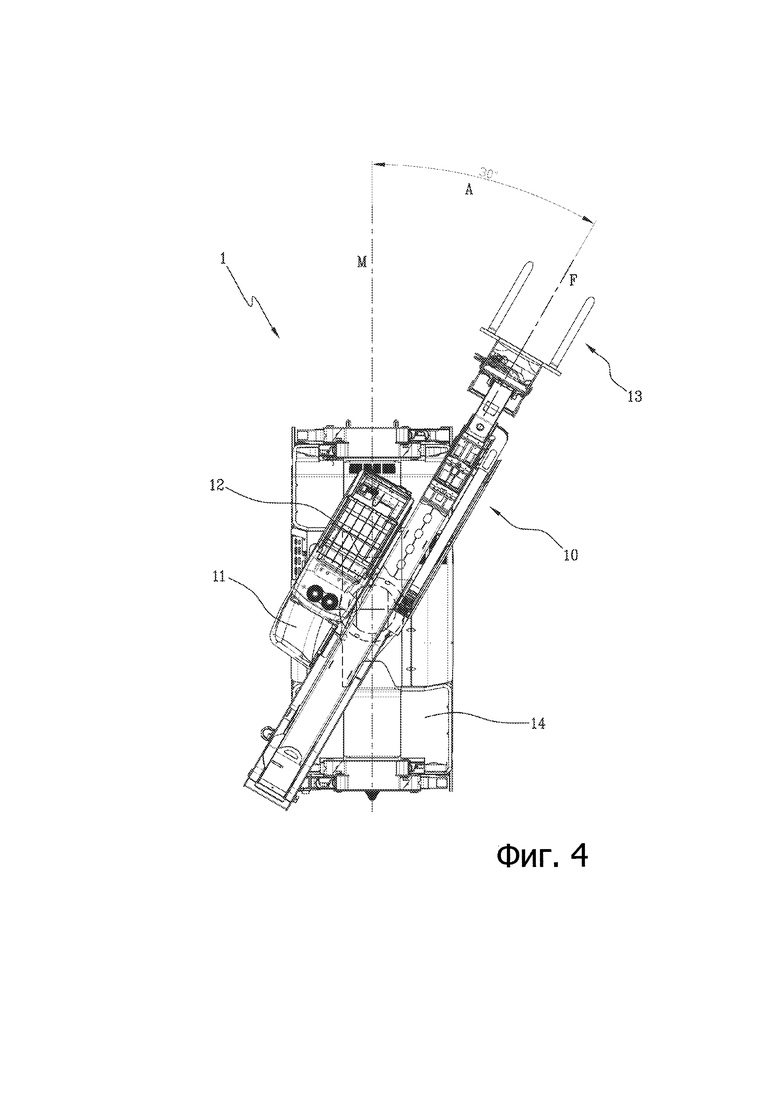
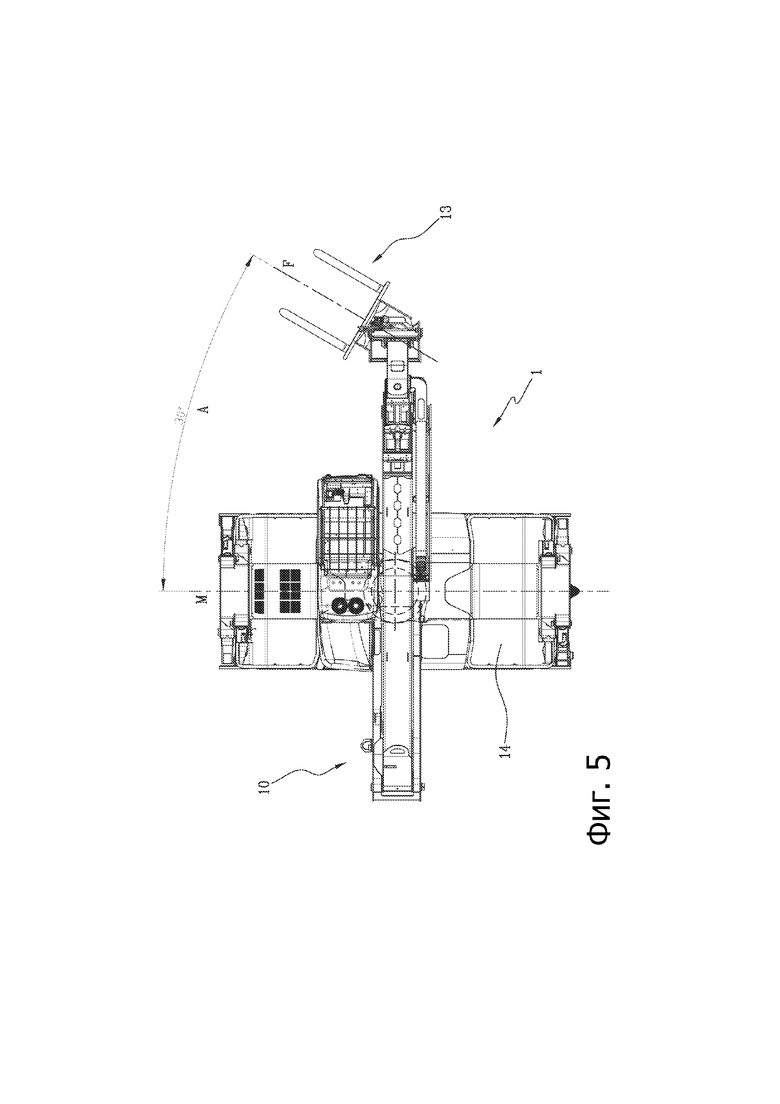
фиг. 3-5 виды сверху машины, представленной на предыдущих чертежах, которые представляют возможные перемещения, управляемые с помощью изобретения; а также
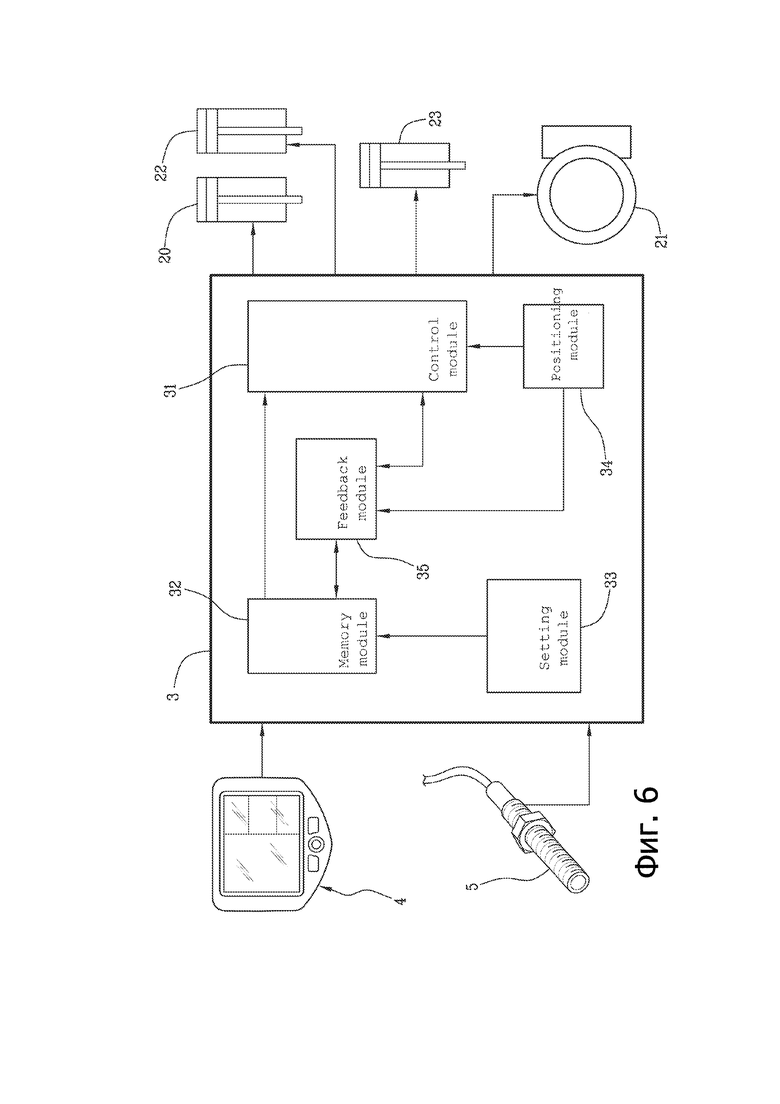
фиг. 6 схема, представляющая блок обработки по изобретению.
Со ссылкой на прилагаемые фигуры чертежей ссылочной позицией 1 в целом обозначена самоходная рабочая машина, которая оснащена системой управления согласно изобретению.
Машина, показанная на чертежах, представляет собой поворотный телехендлер 1, оборудованный телескопической подъемной стрелой 10, установленной на поворотной платформе 11, на которой также размещается кабина 12 водителя; при этом стрела 10 оборудуется на ее дальнем конце загрузочным устройством 13.
Однако можно использовать изобретение с другим типом рабочей машины, обычно оснащенной подвижными элементами, которые в любом случае включают в себя подъемную стрелу 10 и устройство 13.
Подвижные элементы 10, 11, 13 на практике представляет собой компоненты или аппараты или устройства машины 1, которые предназначены для перемещения в пространстве, и работа которых зависит от пространственных ограничений, налагаемых системой управления согласно изобретению; другими словами, на основе некоторых ограничений на движение в предварительно заданном или выбранном окружающем пространстве определенные перемещения будут установлены для подвижных элементов 10, 11, 13, или определенные перемещения будут разрешены или запрещены.
Далее будет сделана ссылка на конкретный случай, в котором подвижными элементами 10, 11, 13, управляемыми системой управления, являются платформа 11, телескопическая стрела 10 и устройство 13 телехендлера 1 (см. фиг. 1-5).
Термин устройство 13 относится как к вспомогательному устройству для захвата груза, такому как вилы, устройство бокового перемещения, лебедка, захват и т.д., так и к вспомогательному устройству для подъема людей и, возможно, также груза, такому как клеть.
Еще более подробно, стрела 10 может иметь на своем дальнем конце крепежное приспособление, также того типа, который обычно используется в телехендлерах, изготовленных заявителем, что позволяет заменять устройство 13 и его соединение с гидравлическим и электронным оборудованием машины 1.
Стрела 10 шарнирно закреплена на поворотной платформе 11, чтобы двигаться вперед и назад вертикально при приведении в действие гидравлического цилиндра 20 (схематически показанного на фиг. 6) или аналогичного исполнительного механизма между нижним положением, по существу горизонтальным, и верхним положением, в котором стрела 10 находится близко к вертикали.
Стрела 10 является растягивающейся и втягивающейся и, более точно, содержит множество сегментов, вставленных один в другой, соосных друг с другом и предназначенных для перемещения в осевом направлении.
Удлинение и втягивание стрелы 10 также производятся одним или более гидравлическими цилиндрами 22 или другими приводами.
Вращение платформы 11 также осуществляется предпочтительно гидравлическим приводом 21, связанным, например, с платформой таким же образом, каким предпочтительно гидравлический привод 23 также перемещает устройство 13 относительно одного или более его сочленений.
В примерах, показанных на прилагаемых чертежах, вилочный захват 13 может вращаться вокруг вертикальной оси или в любом случае перпендикулярно ее средней центральной оси F, чтобы иметь возможность колебаться, двигаясь вправо или влево.
В машине 1 также устанавливается электрогидравлический распределитель, которому подчиняются вышеупомянутые приводы 20, 21, 22, 23, в соответствии с известными способами.
В соответствии с важным аспектом изобретения система управления включает в себя блок 3 обработки, который содержит модуль 31 управления, выполненный с возможностью формирования сигналов управления, предназначенных для автоматической регулировки работы вышеупомянутых приводов 20, 21, 22, 23 на основе одного или более пространственных ограничивающих параметров, которые являются функцией пространственных ограничений, накладываемых на движения подвижных элементов 10, 11, 13 машины 1, т.е. стрелы 10, устройства 13 и платформы 11.
Термин «пространственные ограничения» относится к ограничениям на положение и/или ориентацию, которые может принимать один или более подвижных элементов 10, 11, 13 относительно предварительно заданного ориентира; например, они могут представлять собой геометрические ограничения, которые относятся к относительному положению подвижных элементов 10, 11, 13 относительно опорной части 14 машины 1.
Хотя ниже будет сделана ссылка на случай телехендлера 1, причем пространственные ограничения указаны в отношении устройства 13, тем самым определяя последующие ограничения на движения, придаваемые стреле 10 и платформе 11, поскольку они соединены попарно и сочленены друг с другом, ограничения могут быть указаны со ссылкой на стрелу 10 и/или платформу 11 или на геометрическую конфигурацию соединения устройство 13 - стрела 10 - платформа 11.
Те же концепции также распространяются на применения, отличные от поворотных телехендлеров, как уже объяснено выше, в соответствующими изменениями.
На практике блок 3 обработки передает сигналы управления на распределитель, которые вследствие этого подает команды на приводы 20, 21, 22, 23 таким образом, что они перемещают элементы в соответствии с определенными условиями, например ориентацией устройства 13, расстоянием от рамы 14 машины 1 или от элементов, расположенных в окружающем пространстве или разрешенных зонах пространства и запрещенных зонах для позиционирования устройства 13 и т.д.; некоторые практические примеры этих пространственных ограничений будут проиллюстрированы ниже после более полной иллюстрации некоторых структурных и функциональных аспектов изобретения.
Более конкретно, система управления действует совместно с системой управления подвижными элементами 10, 11, 13 как такового известного типа и, следовательно, не описывается здесь подробно, что позволяет оператору выполнять запрошенные операции.
На практике машина 1 по изобретению содержит известную систему управления, снабженную органами управления в кабине, такими как джойстик, педали, кнопки и т.д., которые приводятся в действие оператором; при воздействии на органы управления генерируются сигналы, полученные от распределителя, которые затем регулируют работу приводов 20, 21, 22, 23 стрелы 10, устройства 13 и платформы 11 (или других подвижных элементов 10, 11, 13).
В изобретении блок 3 обработки также принимает сигналы возбуждения от команд в кабине и, в зависимости от полученных ограничивающих параметров, автоматически определяет ограничения на поведение приводов 20, 21, 22, 23 и, следовательно, подвижных элементов 10, 11, 13; этот аспект будет дополнительно рассмотрен в следующих абзацах.
Вообще говоря, следует отметить, что в настоящем описании блок 3 обработки представлен как подразделенный на отдельные функциональные модули исключительно с целью четкого и полного описания функций.
На практике блок 3 обработки может состоять из одного электронного устройства, также того типа, который обычно присутствует на этом типе машины, соответствующим образом запрограммированного для выполнения описанных функций; различные модули могут соответствовать аппаратным блокам и/или программам системного программного обеспечения, составляющим часть запрограммированного устройства.
В качестве альтернативы или дополнения, функции могут выполняться множеством электронных устройств, на которых могут быть распределены вышеупомянутые функциональные модули.
Вообще говоря, блок 3 обработки может иметь один или более микропроцессоров или микроконтроллеров для выполнения команд, содержащихся в модулях памяти, и вышеупомянутые функциональные модули также могут быть распределены по множеству локальных или дистанционных вычислительных устройств на основе архитектуры сети, в которой они находятся.
В соответствии с дающим преимущество признаком изобретения система управления содержит средство 4 сбора данных, подключенное к блоку 3 обработки, которое предназначено для получения вышеупомянутых ограничивающих параметров.
Средство 4 сбора данных предназначено для формирования ограничивающих сигналов в зависимости от этих параметров, которые принимаются от модуля 31 управления блока 3 обработки, которые в результате ограничивают перемещения элементов машины 1.
Например, как схематически показано на фиг. 6, средство сбора данных может включать в себя пользовательский интерфейс 4, который позволяет оператору вводить или выбирать ограничивающие параметры.
Более конкретно, интерфейс 4 может быть доступен из кабины водителя, например, с помощью сенсорного дисплея, при воздействии на графические указатели, или с помощью более традиционных команд, например ручек, кнопок или рычагов.
Пользовательский интерфейс 4 может быть выполнен с возможностью выбирать желаемое пространственное ограничение среди множества предварительно заданных пространственных ограничений, записанных в модуле 32 памяти блока 3 обработки, используя выбранное меню или тому подобное, и/или позволять оператору устанавливать желаемые ограничения, исходя из конкретной обстановки, в которой машина 1 должна работать в данный момент.
Следовательно, интерфейс 4 может передавать выбираемые сигналы в блок 3 обработки в зависимости от выбора, сделанного оператором.
Кроме того, блок 3 обработки может содержать модуль 33 настройки, выполненный с возможностью записи расположения подвижных элементов 10, 11, 13, которое было записано оператором, с использованием интерфейсного средства 4, и, таким образом, определяя его в качестве предварительно заданного расположения.
В дополнение или в качестве альтернативы средство 4 сбора данных может содержать датчики, расположенные на машине 1, например, на раме, на устройстве 13 или на других элементах, и предназначенные для получения результатов измерений в окружающем пространстве, например, они могут присутствовать на устройстве 13 или на стреле 10 в виде датчиков, которые измеряют расстояние между ними и любыми препятствиями или изделиями или, в любом случае, элементами, присутствующими в окружающей среде.
Например, могут быть датчики расстояния, расположенные в одной или нескольких точках машины 1, например, на подвижных элементах 10, 11, 13, на поворотной платформе 11, на опорной части 14 ниже и т.д., которые передают сигналы расстояния в блок 3 обработки, функцию расстояния относительно элементов окружающего пространства, предназначенных для определения пространственных ограничивающих параметров для перемещения элементов 10, 11, 13.
Таким образом, в зависимости от ограничивающих параметров, полученных интерфейсом 4, и параметров, полученных датчиками, модуль 31 управления может в результате дать команду распределителю для настройки приводов 20, 21, 22, 23, также принимая во внимание приведение в действие команд оператором в кабине.
Следует также отметить, что предлагаемая машина 1 также содержит множество устройств 5 измерения положения (показаны в стилизованной форме на фиг. 6), предназначенных для определения текущего положения подвижных элементов 10, 11, 13.
Устройства 5 измерения положения подключены к блоку 3 обработки и на практике могут представлять собой датчики перемещения, встроенные в линейные гидравлические приводы 20, 21, 22, 23, или кодеры и фонические колеса для вращательных движений, или микропереключатели, или датчики приближения, которые способны фиксировать ограничения хода.
В любом случае устройства 5 предназначены для генерации соответствующих сигналов положения, получаемых от блока 3 обработки, который содержит модуль 34 позиционирования, выполненный с возможностью мгновенного определения текущего пространственного расположения соответствующих подвижных элементов 10, 11, 13.
В этом случае модуль 31 управления, упомянутый выше несколько раз, подчиняется модулю 34 позиционирования и выполнен с возможностью выработки сигналов управления на основе расположения подвижных элементов 10, 11, 13, определяемого модулем 34 позиционирования.
Более конкретно, блок 3 обработки может также содержать модуль 35 обратной связи, предназначенный для приема сигналов управления и сигналов положения и выполненный с возможностью циклического выполнения сравнения между текущим расположением, определенным модулем 34 позиционирования, и целевым расположением подвижных элементов 10, 11, 13, причем модуль 31 управления выполнен с возможностью выполнять периодические корректировки работы приводов 20, 21, 22, 23 таким образом, чтобы фактическое расположение подвижных элементов 10, 11, 13 соответствовало желаемому расположению.
Кроме того, телехендлер 1 согласно изобретению оборудован системой безопасности, увязанной с перемещаемыми грузами, которой подчинена предложенная система управления, которая также может быть известного типа, предназначенная для обеспечения безопасности движений транспортного средства; более подробно, система безопасности позволяет перемещать грузы в соответствии с известными схемами распределения нагрузок и предотвращает возникновение неустойчивости транспортного средства, например, фронтального типа.
Кроме того, как упомянуто, блок 3 обработки содержит модуль 32 памяти, в котором записано по меньшей мере одно предварительно заданное пространственное расположение для вышеупомянутых подвижных элементов 10, 11, 13; в общем, в модуле 32 памяти может быть набор расположений или конфигураций подвижных элементов 10, 11, 13, взятых по отдельности или во всей их полноте.
В соответствии с предпочтительным аспектом модуль 31 управления выполнен с возможностью формирования сигналов управления, предназначенных для автоматического перемещения подвижных элементов 10, 11, 13 в предварительно заданное расположение, хранящееся в блоке 3 обработки.
В одном случае это предварительно заданное расположение или конфигурация выбирается с использованием интерфейсного модуля 4, например, путем прикосновения к графическому указателю (иконке или строке символов или тому подобному), присутствующему в меню дисплея.
В других случаях запускающее событие может быть другим и не связанным с выборами оператора.
Например, это может быть функцией измерений, выполненных вышеупомянутыми датчиками расстояния или другими датчиками.
Другими словами, может иметь место случай ручного выбора, который запускает перемещения приводов 20, 21, 22, 23 таким образом, что подвижные элементы 10, 11, 13 автоматически позиционируются в предварительно заданном расположении; это является особенно полезной опцией в случае выполнения повторяющихся операций, как обсуждалось во введении.
Однако также можно предположить, что по соображениям безопасности или по другим причинам, когда определенные обстоятельства действуют как триггеры, элементы будут располагаться определенным образом, который известен и определен заранее.
Чтобы иметь возможность точно определять пространственные расположения, которые удовлетворяют установленным ограничениям, один или более пространственных ориентиров могут быть записаны в модуле 32 памяти, так что вышеупомянутые ограничивающие параметры на практике определяются возможными расположениями подвижных элементов 10, 11, 13 по отношению к этим ориентирам.
Например, в качестве ориентира можно взять срединную центральную ось М машины 1 или конкретную точку вдоль оси.
В этом случае геометрическое ограничение может быть выбрано в качестве параллельного принципа организации между срединной центральной осью F устройства 13 и центральной осью М машины 1, как в двух практических примерах, которые проиллюстрированы ниже.
В случае, если необходимо работать вблизи стены или подобных препятствий, можно переместить опорную часть 14 машины 1 близко к стене, переместив устройство 13 на подходящее расстояние от стены, а затем установив геометрическое ограничение, заключающее в том, что она всегда может двигаться так, чтобы ось F была параллельна оси М опорной части 14 (см. фиг. 2).
Таким образом, оператор может перемещать груз, захваченный устройством 13, с высокой скоростью и безопасностью, при условии, что блок 3 обработки управляет приводами 20, 21, 22, 23 таким образом, что устройство 13 всегда остается параллельной стене и скользит всегда на расстоянии, которое было установлено с помощью интерфейсного средства 4 или предварительно записано в качестве предпочтительного расстояния в модуле 32 памяти.
На практике, когда вилы 13 выдвигаются, платформа 11 поворачивается в направлении от стены, стрела 10 выдвигается и вилы 13 уравновешиваются вращением наружу; и наоборот, движения меняются на обратные, когда груз перемещается назад.
Следует отметить, что эта операция также могла бы быть выполнена с использованием ориентиров, отличных от оси М опорной части 14 машины 1, но эквивалентных с эксплуатационной точки зрения.
Кроме того, в случае повторяющейся деятельности, описанной в контексте предшествующего уровня техники, то есть операции перемещения одного за другим множества поддонов из зоны, в которой они накапливаются, до пункта назначения, можно предварительно установить исходное положение, в котором вилочный захват 13 располагается перед группой поддонов, например, с ориентацией таким образом, чтобы быть параллельными оси М опорной части 14 машины 1 (см. фиг. 1).
Следовательно, каждый раз, когда оператору приходится загружать новый поддон, достаточно выбрать исходное положение, используя интерфейс 4 и платформу 11, стрелу 10 и устройство 13, которые автоматически позиционируются в начальной конфигурации и готовы к захвату вилами нового поддона.
Такое расположение подвижных элементов 10, 11, 13 может быть установлено заранее изготовителем или оно может быть установлено оператором в свое время и записано в модуле 32 памяти с помощью вышеупомянутого модуля 33 настройки.
Опять же, с функциональной точки зрения можно получить тот же результат, имея в качестве ориентира геометрический элемент, который отличается от оси опорной части телехендлера 1.
В соответствии с другим режимом применения может быть установлено геометрическое ограничение, состоящее из предварительно заданного угла А между осью устройства 13 и осью М машины 1, как показано на фиг. 3, 4 и 5, где выбранный угол А равен, например, 30°.
Благодаря этой особенности исключаются ошибки в оценке возможных помех между устройством 13 и объектами в окружающей среде, когда платформа 11 вращается, при операциях, в которых был заранее установлен заданный радиус безопасности; в действительности, может быть недостаточно поддерживать длину стрелы 10 фиксированной, поскольку, если устройство 13 имеет произвольную ориентацию, то при определенных угловых положениях стрелы 10 относительно оси опорной части, она может выступать за пределы зоны безопасности и ударять элементы, присутствующие в окружающей среде.
В общем, также возможно сохранить в блоке 3 обработки систему отсчета, центрированную в машине 1, например, в половине центральной оси М опорной части 14, и, устанавливая в качестве ограничивающих параметров координаты, принятые в отношении этого отсчета, установить пределы окружающего пространства, которые не могут быть превышены устройством 13.
Изобретение также может быть осуществлено в виде способа управления подвижными элементами 10, 11, 13 самоходной рабочей машины, предпочтительно выполненной такой, как описано выше.
Способ включает в себя следующие этапы:
получение одного или более ограничивающих параметров как функции пространственных ограничений для подвижных элементов 10, 11, 13 машины 1; а также
автоматическая регулировка работы подвижных элементов 10, 11, 13 в зависимости в параметров пространственных ограничений.
Опционально, способ включает в себя этапы работы, соответствующие соответствующим функциям, выполняемым компонентами машины 1 согласно изобретению, с конкретной, но не исключительной ссылкой на модули блока 3 обработки и на датчики или другие устройства измерения и получения.
Кроме того, компьютерная программа, которая при работе на электронном средстве обработки, реализует вышеупомянутый способ, должна считаться полностью охваченной предложенной концепцией изобретения.
Изобретение относится к телескопическому погрузчику. Модуль памяти хранит компьютерную программу, которая при выполнении электронными средствами обработки машины осуществляет управление ее подвижными элементами. Способ включает получение ограничивающих параметров в зависимости от пространственных ограничений на перемещения элементов, автоматическую регулировку работы элементов в зависимости от пространственных ограничивающих параметров. Самоходная рабочая машина оснащена подвижными элементами, включающими подъемную стрелу. Стрела имеет устройство для подъема или перемещения грузов и оснащена множеством приводов для приведения в движение элементов. По меньшей мере один из ограничивающих параметров является функцией пространственных ограничений на перемещения элементов. Система управления содержит средство получения параметров, предназначенное для выдачи ограничивающих сигналов. Модуль управления предназначен для приема ограничивающих сигналов. Средство получения ограничивающих параметров включает пользовательский интерфейс. Интерфейс позволяет оператору вводить или выбирать параметры. Достигается возможность оператору заранее задать и изменять ограничение, которое необходимо ввести в соответствии с условиями как окружающей среды, так и конкретной работы, которую требуется выполнить. 3 н. и 10 з.п. ф-лы, 6 ил.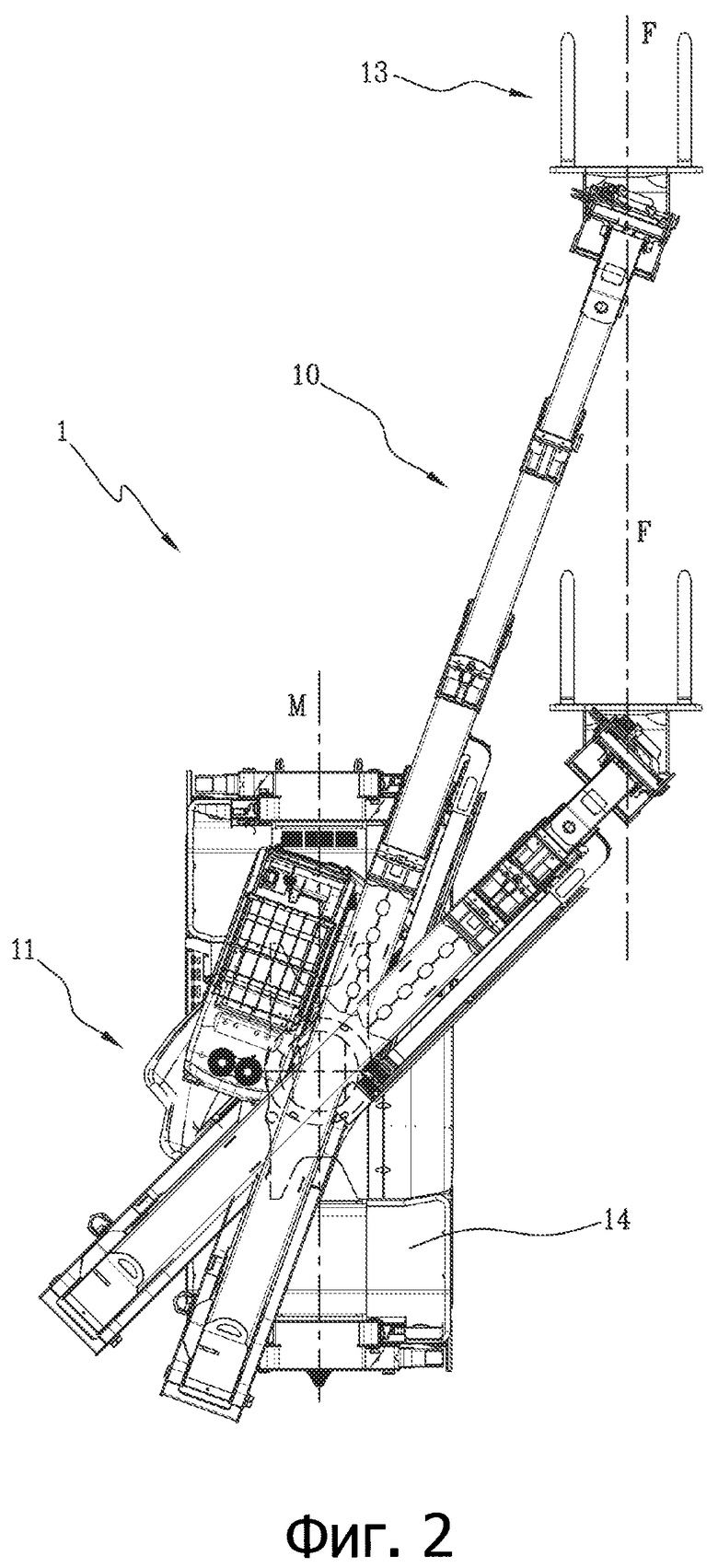
1. Самоходная рабочая машина (1), оснащенная подвижными элементами (10, 11, 13), которые включают в себя подъемную стрелу (10), имеющую устройство (13) для подъема или перемещения грузов, а также оснащенная множеством приводов (20, 21, 22, 23), предназначенных для приведения в движение упомянутых элементов (10, 11, 13); при этом машина содержит систему управления, которая включает в себя блок (3) обработки, содержащий модуль (31) управления, выполненный с возможностью формирования сигналов управления, предназначенных для регулирования работы приводов (20, 21, 22, 23) на основе одного или более пространственных ограничивающих параметров, причем по меньшей мере один из ограничивающих параметров является функцией пространственных ограничений на перемещения упомянутых элементов, отличающаяся тем, что система управления содержит средство (4) получения ограничивающих параметров, предназначенное для выдачи ограничивающих сигналов в зависимости от этих параметров, причем модуль (31) управления предназначен для приема ограничивающих сигналов, а средство получения ограничивающих параметров включает в себя пользовательский интерфейс (4), который позволяет оператору вводить или выбирать ограничивающие параметры.
2. Машина (1) по предыдущему пункту, содержащая первый привод (20) для подъема и опускания стрелы (10) и по меньшей мере второй привод (22) для вытягивания или втягивания длины стрелы (10).
3. Машина (1) по любому из предыдущих пунктов, в которой устройство (13) для подъема или перемещения грузов способно вращаться при приведении в действие третьего привода (23).
4. Машина (1) по любому из предыдущих пунктов, в которой один из подвижных элементов (10, 11, 13) является поворотной платформой (11), на которой подвижно установлена подъемная стрела, причем имеется четвертый привод (21) для управления платформой (11) в режиме вращения.
5. Машина (1) по любому из предыдущих пунктов, представляющая собой поворотный телескопический погрузчик.
6. Машина (1) по любому из предыдущих пунктов, в которой блок (3) обработки содержит модуль (32) памяти, в котором записано по меньшей мере одно предварительно заданное пространственное расположение для вышеупомянутых подвижных элементов (10, 11, 13), а модуль (31) управления выполнен с возможностью выработки сигналов управления, предназначенных для автоматического перемещения элементов в предварительно заданное расположение.
7. Машина (1) по любому из предыдущих пунктов, содержащая множество устройств (5) измерения положения, предназначенных для определения положения подвижных элементов (10, 11, 13), причем устройства (5) предназначены для генерации соответствующих сигналов положения, при этом блок (3) обработки предназначен для приема сигналов положения и содержит модуль (34) позиционирования, выполненный с возможностью определять текущее расположение вышеупомянутых подвижных элементов (10, 11, 13), причем блок (31) управления выполнен с возможностью формирования сигналов управления на основе расположения подвижных элементов (10, 11, 13), определяемого модулем (34) позиционирования.
8. Машина (1) по любому из предыдущих пунктов, в которой блок (3) обработки содержит модуль (35) обратной связи, предназначенный для приема сигналов управления и сигналов положения и выполненный с возможностью выполнять сравнение между текущим расположением, определенным модулем позиционирования, и целевым расположением подвижных элементов (10, 11, 13), причем модуль (31) управления выполнен с возможностью выполнения коррекций работы приводов (20, 21, 22, 23).
9. Машина (1) по любому из предыдущих пунктов, в которой модуль (32) памяти, включенный в состав блока (3) обработки, записывает один или более пространственных ориентиров (М) для вычисления расположения элементов (10, 11, 13), причем ограничивающие параметры определяются расположениями одного или более элементов относительно ориентиров.
10. Машина (1) по предыдущему пункту, в которой по меньшей мере один ориентир представляет собой центральную ось машины (1), а пространственное ограничение по меньшей мере одного параметра представляет собой параллельность оси устройства (13) для подъема или перемещения грузов и центральной оси машины (1).
11. Машина (1) по любому из предыдущих пунктов, в которой по меньшей мере один ориентир представляет собой центральную ось машины (1), а по меньшей мере одно пространственное ограничение представляет собой предварительно заданный угол между осью устройства (13) для подъема или перемещения грузов и центральной осью машины (1).
12. Способ управления подвижными элементами (10, 11, 13) самоходной рабочей машины по п.1, включающий в себя следующие этапы:
получение одного или более ограничивающих параметров в зависимости от пространственных ограничений на перемещения элементов (10, 11, 13); и
автоматическую регулировку работы подвижных элементов (10, 11, 13) в зависимости от пространственных ограничивающих параметров.
13. Модуль памяти, хранящий компьютерную программу, которая, при выполнении электронными средствами обработки самоходной рабочей машины по п.1, осуществляет способ по предыдущему пункту.
| ТРАНСПОРТНОЕ СРЕДСТВО, СИСТЕМА АККУМУЛЯТОРНОЙ БАТАРЕИ ТРАНСПОРТНОГО СРЕДСТВА И КОНСТРУКЦИЯ ЧЕХЛА АККУМУЛЯТОРНОЙ БАТАРЕИ | 2016 |
|
RU2684836C2 |
| US 2004210342 A1, 21.10.2004 | |||
| 0 |
|
SU171471A1 | |
| Способ повышения дебита скважин | 1944 |
|
SU65832A1 |

