Изобретение относится к ядерному машиностроению и может быть использовано при производстве твэлов из рефабрицированного высокофонового топлива.
Известен «Комбинированный оптико-электромагнитный дефектоскоп для обнаружения дефектов поверхности твэлов» [Никитенко Н.Ф., Кукса Н.Н., Шмаль А.Л., Виниченко П.Г. Комбинированный оптико-электромагнитный дефектоскоп для обнаружения дефектов поверхности твэлов]. Данное устройство содержит сканирующую головку, в которую включены две группы датчиков - токовихревые и оптико-электронные. Данное устройство позволяет обнаруживать и различать внешние загрязнения и цветовые пятна, а также механические дефекты глубиной более 50 мкм.
Недостатками является то, что данное устройство не обладает точностью обнаружения механических дефектов порядка 20 мкм и не может работать в условиях высокофонового топлива.
Известен «Пост контроля внешнего вида» КПБМ.1218 [Пост контроля внешнего вида. Руководство по эксплуатации КПБМ.1218РЭ - Новосибирск. КТИ НП СО РАН, 2019.-26 с].
Данное устройство содержит корпус, осветитель кольцевого типа, блоки телевизионного контроля, содержащие видеокамеры с объективами и оптические зеркала. Пост работает совместно с транспортной системой линии контроля, содержащей приводные и прижимные ролики.
Недостатком данного устройства является невозможность определения глубины механического дефекта или дефектов и отсутствие возможности отличать внешние загрязнения и цветовые пятна от механических повреждений.
Задачей изобретения является расширение функциональных возможностей устройства контроля за счет компенсирования результатов внешнего осмотра и анализа глубины дефектов, повышение точности контроля глубины механических дефектов и повышение стойкости оборудования в условиях рефабрицированного высокофонового топлива.
Решение указанной задачи достигается тем, что в предложенном устройстве контроля внешнего вида и глубины дефектов твэлов, содержащем транспортную систему для продольного перемещения твэла, корпус с размещаемыми на нем осветителе кольцевого типа и блоком телевизионного контроля, состоящего из видеокамер с объективами и зеркал, осветитель кольцевого типа выполнен на основе многоточечного светодиодного источника, оснащенного рассеивающим устройством в виде воронки и обеспечивающим рассеянный поток света на поверхность твэла под углом, равным или меньше 45°, причем сам осветитель оснащен механизмом продольного перемещения и фиксации, при этом в корпус между твэлом и видеокамерами установлен защитный экран из вольфрама или свинца, причем в корпус дополнительно установлено такое количество 20-лазерных триангуляционных сканеров, которое соответствует количеству блоков видеоконтроля, причем их оси визирования установлены на расстоянии измерения, при этом направление электронного сканирования установлено поперек продольной оси твэла, причем ширина зоны сканирования выбрана равной ширине кадра блока видеоконтроля, при этом между 2D-сканерами и твэлом установлен сдвижной защитный экран с приводом его перемещения, при этом транспортная система выполнена с нижним приводным роликом с управляемым приводом на входе в корпус, при этом верхний прижимной ролик оснащен датчиком перемещения твэла, а на выходе из корпуса установлен второй приводной ролик транспортной системы с управляемым приводом и второй прижимной ролик с датчиком перемещения, при этом перед первым и вторым приводным роликом установлены бесконтактные датчики наличия твэла, причем выходы бесконтактных датчиков наличия твэла и датчиков перемещения твэла подключены ко входам устройства управления, выходы которого подключены к приводам перемещения твэла и защитного экрана, выходы блоков видеоконтроля подключены ко входам устройства обработки видеосигнала, один логический выход которого подключен к одному из входов устройства управления, а информационный выход - ко входу промышленного компьютера, при этом выходы 2D-сканеров подключены к входам промышленного компьютера (далее - ПК).
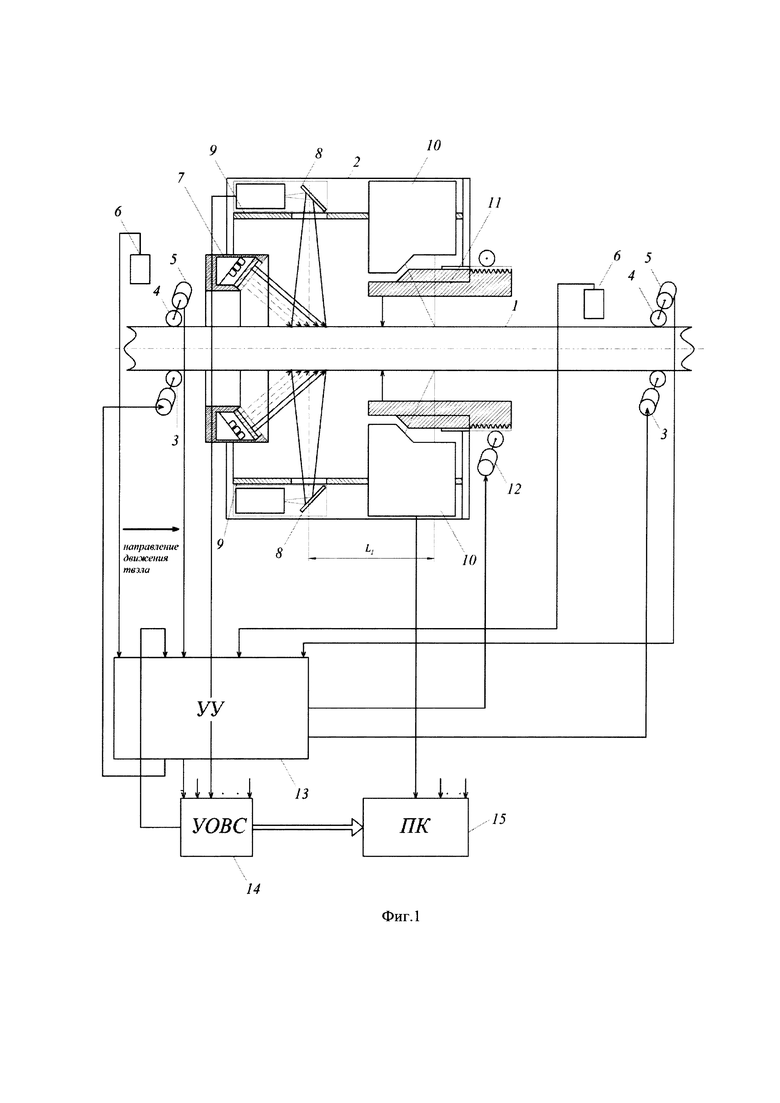
Сущность изобретения иллюстрируется фигурой 1, на которой показана структурная схема устройства, где:
1 - контролируемый твэл;
2 - корпус;
3 - первый и второй приводные ролики;
4 - первый и второй прижимные ролики;
5 - датчики перемещения твэла;
6 - датчики наличия твэла;
7 - осветитель;
8 - блоки видеоконтроля;
9 - экран защитный;
10 - датчики лазерных 2D-сканеров триангуляционного типа;
11 - экран сдвижной;
12 - привод перемещения экрана;
13 - устройство управления;
14 - устройство обработки видеосигнала;
15 - промышленный компьютер.
Контролируемый твэл 1 (далее - твэл) пропускают через корпус 2 устройства при помощи транспортной системы, состоящей из первого и второго нижних ведущих роликов 3, первого и второго прижимных роликов 4, соединенных с датчиком перемещения твэла 5 и датчиками наличия твэла 6. Осветитель кольцевого типа 7 обеспечивает рассеянное освещение зоны видеоконтроля под углом, относительно поверхности твэла, равным или меньше 45°. Блоки видеоконтроля 8, со стороны твэла, защищены защитными экранами 9.
Датчики лазерных 2D-сканеров 10 установлены осями визирования параллельно осям визирования блоков видеоконтроля на фиксированном расстоянии измерения L1. Для защиты 2D-сканеров, между ними и твэлом, установлен сдвижной защитный экран 11, оснащенный приводом перемещения экрана 12. Выходы датчиков наличия твэла 6 и датчиков перемещения твэла 5 подключены ко входам устройства управления 13, выходы которого подключены ко входам управления приводов роликов перемещения твэла 3 и привода перемещения защитного экрана 12.
Выходы блоков видеоконтроля подключены ко входам устройства обработки видеосигнала 14, один из выходов которого - дискретный подключен к одному из входов устройства управления 13, второй выход - информационный, подключен к одному из входов ПК 15, к другим входам которого подключены выходы 2D-сканеров.
Предложенное устройство работает следующим образом.
При помощи транспортной системы контролируемый твэл 1 слева направо вводят в устройство. При срабатывании датчика наличия твэла 6, устройство управления производит включение приводных роликов 3. При пересечении торцом твэла края кадра блоков видеоконтроля, устройство обработки видеосигнала 14 формирует дискретный сигнал на вход устройства управления 13, который формирует нулевую координату х0 контролируемого твэла, а по показаниям первого датчика положения твэла 5 формируется текущая координата xt.
Блоки видеоконтроля 8 и устройство обработки видеосигнала 14, по заданному порогу контрастности, формируют сигнал наличия дефекта с фиксацией его координаты хд и самого кадра дефекта в памяти устройства управления 13 и ПК 15. С учетом скорости преодоления контролируемым твэлом интервала L1, в момент подхода данной координаты к зоне работы 2D-сканеров, по сигналу устройства управления 13 сдвигается защитный экран 11, и привод ведущих роликов 3 переходит в режим работы, обеспечивающий сканирование поверхности 2D-сканерами на протяжении кадра (кадров), обусловленных длиной обнаруженного дефекта. После сканирования защитный экран вновь устанавливается на место, а скорость перемещения твэла опять устанавливается равной скорости видеоконтроля. При достижении торцом твэла второго датчика наличия твэла 6, перемещение твэла и формирование текущей координаты обеспечивается вторым ведущим приводным роликом 3 и вторым прижимным роликом 4, с датчиком перемещения 5.
При обнаружении признаков следующего дефекта процедура повторяется.
ПК осуществляет наложение изображения дефекта на его профилограмму, вычисляет его размеры, в том, числе глубину, идентифицируя тип дефекта или наличия цветового пятна.
Использование предложенного технического решения позволяет расширить функциональные возможности устройства контроля внешнего вида и глубины дефектов твэлов за счет компенсирования результатов внешнего осмотра и анализа глубины дефектов, повысить точность контроля глубины механических дефектов и повысить стойкость оборудования в условиях применения рефабрицированного высокофонового топлива.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ВНЕШНЕГО ВИДА, ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТВЭЛА И РАЗМЕРОВ ЕГО ДЕФЕКТОВ | 2023 |
|
RU2805139C1 |
| УСТРОЙСТВО КОМПЬЮТЕРНОЙ СИСТЕМЫ ДЛЯ ТЕЛЕВИЗИОННОГО КРУГОВОГО СКАНИРОВАНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ СВАРНЫХ ШВОВ ТРУБОПРОВОДА ИЗ ТРУБ БОЛЬШОГО ДИАМЕТРА | 2019 |
|
RU2709408C1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ИЗГОТОВЛЕНИЯ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ И ИХ РАЗБРАКОВКИ | 1995 |
|
RU2107960C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ СЧИТЫВАНИЯ ДОКУМЕНТА И ПЕЧАТИ МЕТКИ НА НЕМ | 2014 |
|
RU2629885C2 |
| УСТРОЙСТВО КОМПЬЮТЕРНОЙ СИСТЕМЫ ДЛЯ ТЕЛЕВИЗИОННОГО КРУГОВОГО ОБЗОРА ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБ И ТРУБОПРОВОДОВ БОЛЬШОГО ДИАМЕТРА | 2017 |
|
RU2640755C1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ИЗГОТОВЛЕНИЯ ОБОЛОЧКИ ТЕПЛОВЫДЕЛЯЮЩЕГО ЭЛЕМЕНТА | 2003 |
|
RU2244356C2 |
| Устройство для контроля поверхностных пороков рулонных материалов | 1988 |
|
SU1681243A1 |
| ЛИНИЯ КОНТРОЛЯ И РАЗБРАКОВКИ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2003 |
|
RU2256248C2 |
| Способ автоматического контроля наличия комплектующих в твэлах и сплошности топливного столба и устройство для его реализации | 2022 |
|
RU2792704C1 |
| Устройство контроля топливного столба тепловыделяющего элемента с навивкой дистанционирующей проволоки или ленты | 2022 |
|
RU2795188C1 |
Изобретение относится к ядерному машиностроению и может быть использовано при производстве твэлов из рефабрицированного высокофонового топлива. В устройстве осветитель кольцевого типа выполнен на основе многоточечного светодиодного источника, оснащенного рассеивающим устройством в виде воронки и обеспечивающим рассеянный поток света на поверхность твэла под углом, равным или меньше 45°. Осветитель оснащен механизмом продольного перемещения и фиксации. В корпус между твэлом и видеокамерами установлен защитный экран из вольфрама или свинца. В корпус установлено такое количество 2D-лазерных триангуляционных сканеров, которое соответствует количеству блоков видеоконтроля, а их оси визирования установлены на расстоянии измерения. Направление электронного сканирования установлено поперек продольной оси твэла, причем ширина зоны сканирования выбрана равной ширине кадра блока видеоконтроля. Между 2D-сканерами и твэлом установлен сдвижной защитный экран с приводом перемещения. Транспортная система выполнена с нижним приводным роликом с управляемым приводом на входе в корпус. Верхний прижимной ролик оснащен датчиком перемещения твэла. На выходе из корпуса установлен второй приводной ролик транспортной системы с управляемым приводом и второй прижимной ролик с датчиком перемещения. Перед первым и вторым приводными роликами установлены бесконтактные датчики наличия твэла. Выходы бесконтактных датчиков наличия твэла и датчиков перемещения твэла подключены ко входам устройства управления, выходы которого подключены к приводам перемещения твэла и защитного экрана. Выходы блоков видеоконтроля подключены ко входам устройства обработки видеосигнала, один логический выход которого подключен к одному из входов устройства управления, а информационный выход - ко входу промышленного компьютера, при этом выходы 2D-сканеров подключены к входам персонального компьютера. Изобретение обеспечивает повышение точности контроля глубины механических дефектов и стойкости оборудования. 1 ил.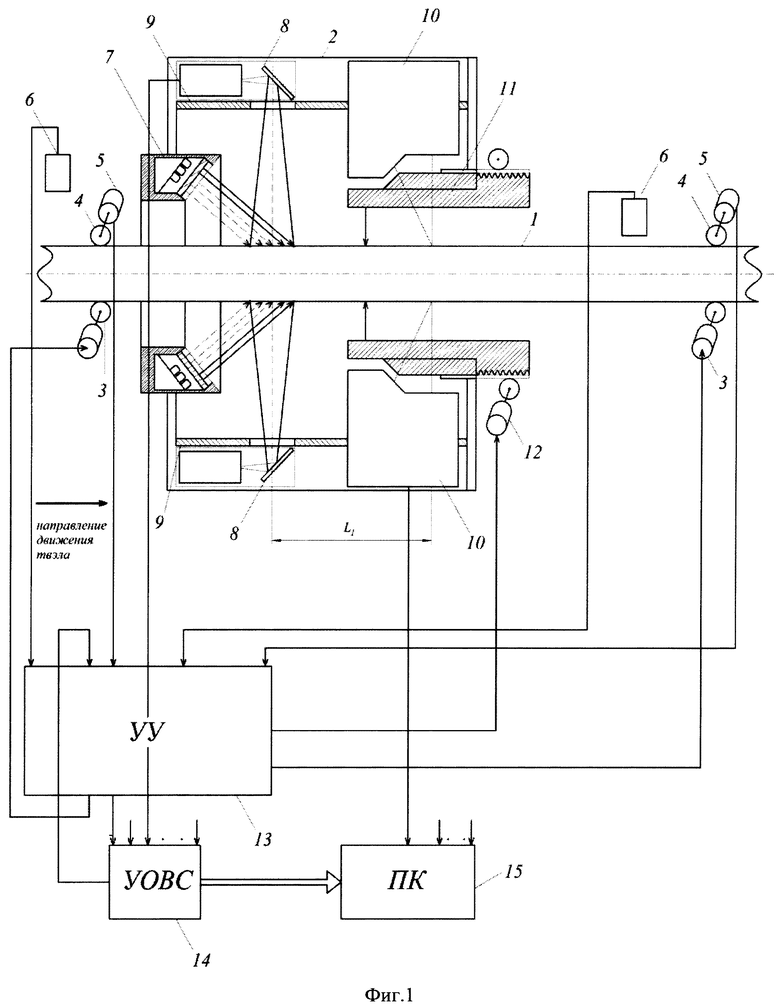
Устройство контроля внешнего вида и глубины дефектов твэлов, содержащее транспортную систему для продольного перемещения твэла, корпус с размещенным на нем осветителем кольцевого типа и блоком телевизионного контроля, состоящим из видеокамер с объективами и зеркал, отличающееся тем, что осветитель кольцевого типа выполнен на основе многоточечного светодиодного источника, оснащенного рассеивающим устройством в виде воронки и обеспечивающим рассеянный поток света на поверхность твэла под углом, равным или меньше 45°, причем сам осветитель оснащен механизмом продольного перемещения и фиксации, при этом в корпус между твэлом и видеокамерами установлен защитный экран из вольфрама или свинца, причем в корпус дополнительно установлено такое количество 2D-лазерных триангуляционных сканеров, которое соответствует количеству блоков видеоконтроля, причем их оси визирования установлены на расстоянии измерения, при этом направление электронного сканирования установлено поперек продольной оси твэла, причем ширина зоны сканирования выбрана равной ширине кадра блока видеоконтроля, при этом между 2D-сканерами и твэлом установлен сдвижной защитный экран с приводом его перемещения, при этом транспортная система выполнена с нижним приводным роликом с управляемым приводом на входе в корпус, при этом верхний прижимной ролик оснащен датчиком перемещения твэла, а на выходе из корпуса установлен второй приводной ролик транспортной системы с управляемым приводом и второй прижимной ролик с датчиком перемещения, при этом перед первым и вторым приводными роликами установлены бесконтактные датчики наличия твэла, причем выходы бесконтактных датчиков наличия твэла и датчиков перемещения твэла подключены ко входам устройства управления, выходы которого подключены к приводам перемещения твэла и защитного экрана, выходы блоков видеоконтроля подключены ко входам устройства обработки видеосигнала, один логический выход которого подключен к одному из входов устройства управления, а информационный выход - ко входу промышленного компьютера, при этом выходы 2D-сканеров подключены к входам промышленного компьютера.
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ИЗГОТОВЛЕНИЯ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ И ИХ РАЗБРАКОВКИ | 2001 |
|
RU2216058C2 |
| CN 109978866 A, 05.07.2019 | |||
| JPH 03189508 A, 19.08.1991. | |||

