Перекрестная ссылка на родственную заявку
[0001] Настоящая заявка подана 17 июня 2019 года как Международная заявка РСТ и испрашивает приоритет заявки на патент США №62/686649, зарегистрированной 18 июня 2018, содержание которой полностью включено в настоящий документ путем ссылки.
Область техники, к которой относится изобретение
[0002] Настоящее изобретение в целом относится к горному делу, а более конкретно - к машинам для дробления и измельчения руды, а еще конкретнее - к системе и способу для более эффективного использования измельчительных мельниц.
Предпосылки создания изобретения
[0003] Измельчительные мельницы представляют собой большие вращающиеся барабаны, предназначенные для измельчения руды до приемлемых размеров. Руда, или «материал», переваливается внутри барабана при его вращении, падая на саму себя, плотно прижимаясь к внутренним поверхностям мельницы и ударяясь о загрузку мельницы, которая часто содержит свободные металлические шары или стержни внутри мельницы. В результате этого процесса большие куски руды режутся, дробятся и размалываются в малые куски руды или малые куски руды - в мелкий порошок.
[0004] Процесс измельчения известен довольно давно, но работает хорошо. Взаимодействие между материалом, загрузкой и внутренними поверхностями способно быстро размельчить руду до приемлемых и используемых размеров в зависимости от применения. Неудивительно, однако, что этот процесс сильно разрушает машину. В результате мельницы всегда снабжаются футеровкой. Если бы мельница не была защищена футеровкой, материал и загрузка ударяли бы непосредственно в кожух мельницы, и при пробитии отверстия в кожухе пришлось бы менять всю мельницу. Использование футеровки защищает кожух. Соответственно, при работе мельницы изнашивается не сама мельница, а футеровка.
[0005] В конечном счете, футеровку приходится заменять. Однако время простоя в течение одного или двух дней во время такой замены может стоить десятков, если не сотен тысяч долларов потерянной прибыли. Поэтому операторы мельниц предпочитают выполнять замену футеровочных узлов как можно реже и быстрее. Но они должны выполнять ремонтные работы каждый раз, когда футеровка деформируется до такой степени, что ставит под угрозу безопасность работы и целостность мельницы. Таким образом, операторы мельниц иногда заменяют футеровку или выполняют ее замену слишком рано. Когда ремонтная бригада выполняет замену, может быть эффективней заменить частично изношенную футеровку, которая еще не выработала свой ресурс, чем позже снова вызывать ремонтную бригаду и вторично останавливать работу мельницы. Преждевременные или излишние замены также, конечно, приводят к затратам.
[0006] Поэтому имеется потребность в системе и способе для контроля состояния футеровки, создания графика ее замены и повышения эффективности работы измельчительных мельниц.
Сущность изобретения
[0007] Настоящее изобретение раскрывает систему и способ для более эффективного использования измельчительных мельниц. Имеется один или более датчиков в футеровке, размещенной внутри кожуха мельницы. Датчики могут содержать метки радиочастотной идентификации (Radio Frequency IDentification; RFID), датчики профиля износа футеровки (например, такой как ультразвуковой датчик), инерциальный датчик (предпочтительно содержащий как инклинометр, так и акселерометр), и акустический датчик и т.п. Когда футеровка установлена в кожухе, метка радиочастотной идентификации используется для регистрации местоположения футеровки внутри кожуха.
[0008] При работе, информация, обеспечиваемая датчиками, собирается блоком передачи данных и отправляется беспроводным передатчиком в компьютер, имеющий антенну и приемник для таких данных. Центральный процессор компьютера собирает данные и обновляет базу данных с использованием информации от метки радиочастотной идентификации, чтобы соотнести принятую информацию с соответствующей футеровкой. Оператор может наблюдать данные в режиме реального времени во время работы мельницы, чтобы определить эффективность работы мельницы и определить, требуется ли замена любого из узлов футеровки. На основе этой информации можно произвести изменения в работе мельницы.
[0009] Поэтому, согласно одному из аспектов настоящего изобретения предложен футеровочный узел, используемый внутри измельчительной мельницы в качестве детали, изнашиваемой под воздействием материала и загрузки, при этом упомянутый футеровочный узел содержит: тело, имеющее длину, ширину и глубину, расположенное внутри измельчительной мельницы, и также имеющее полость, сформированную в части тела; и датчик, расположенный в этой полости в теле, установленный и выполненный с возможностью измерения изменения глубины тела.
[0010] В дополнение к предыдущему абзацу, дополнительные аспекты включают (отдельно или в комбинации) следующее: упомянутый датчик представляет собой ультразвуковой датчик, также имеется акустический датчик для генерации сигнала, соответствующего количеству ударов материала и загрузки по футеровочному узлу во время работы измельчительной мельницы, также имеется акселерометрический датчик для генерации сигнала, соответствующего интенсивности ударов материала и загрузки по футеровочному узлу во время работы измельчительной мельницы, также имеется инерциальный датчик для генерации сигнала, соответствующего относительному положению футеровочного узла внутри измельчительной мельницы во время ее работы; футеровочный узел также содержит метку радиочастотной идентификации, посредством которой регистрируется местоположение футеровочного узла внутри измельчительной мельницы после установки футеровочного узла внутри этой мельницы.
[0011] Согласно второму аспекту настоящего изобретения, предлагается система для контроля работы измельчительной мельницы, содержащая: множество футеровочных узлов, расположенных внутри измельчительной мельницы в заданном положении; множество датчиков для контроля параметра износа футеровочных узлов, при этом каждый футеровочный узел содержит соответствующий датчик, причем каждый датчик установлен и выполнен с возможностью генерирования первого сигнала, соответствующего параметру износа соответствующего футеровочного узла, и каждый датчик расположен по меньшей мере частично внутри соответствующего футеровочного узла; и множество передатчиков, передающих первые сигналы для сравнения с заранее заданными эталонными значениями износа.
[0012] Согласно еще одному аспекту настоящего изобретения, предложен способ определения времени для замены футеровочного узла внутри измельчительной мельницы, включающий: размещение датчика для измерения профиля износа внутри футеровочного узла; регистрацию положения футеровочного узла внутри измельчительной мельницы, в результате чего положение датчика внутри измельчительной мельницы также становится известно; и контроль выходного сигнала датчика для определения подходящего времени для замены футеровочного узла на основе упомянутого профиля износа.
[0013] Хотя изобретение будет описано со ссылками на предпочтительные варианты конфигураций, способов и спецификаций, очевидно, что изобретение не следует считать ограниченным конфигурациями, способами и/или спецификациями, описанными здесь. Кроме того, хотя здесь описаны определенные типы датчиков, и они показаны в конкретных местоположениях внутри футеровочных узлов, принципы настоящего изобретения охватывают использование датчиков, расположенных внутри барабана (то есть, внутри кожуха измельчительной мельницы). Эти и другие вариации изобретения станут очевидны специалистам в данной области техники из более подробного описания.
[0014] Преимущества и признаки, характеризующие настоящие изобретения, очевидны из пунктов приложенной формулы изобретения. Однако для лучшего понимания изобретения следует обратиться к чертежам, которые являются частью настоящей заявки, и подробному описанию, где иллюстрируются и описываются варианты осуществления настоящего изобретения.
Краткое описание чертежей
[0015] На чертежах одинаковыми позициями обозначены аналогичные узлы на различных видах.
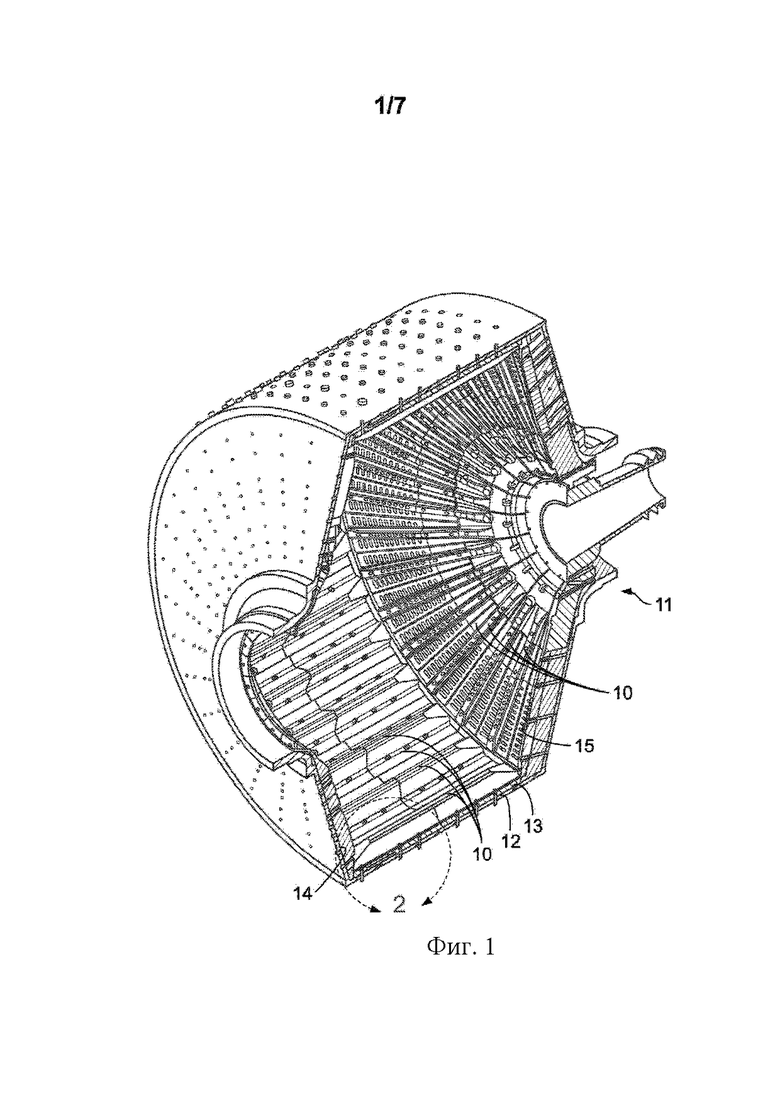
[0016] На фиг. 1 показано изображение частичного разреза мельницы, оборудованной усовершенствованными футеровочными узлами.
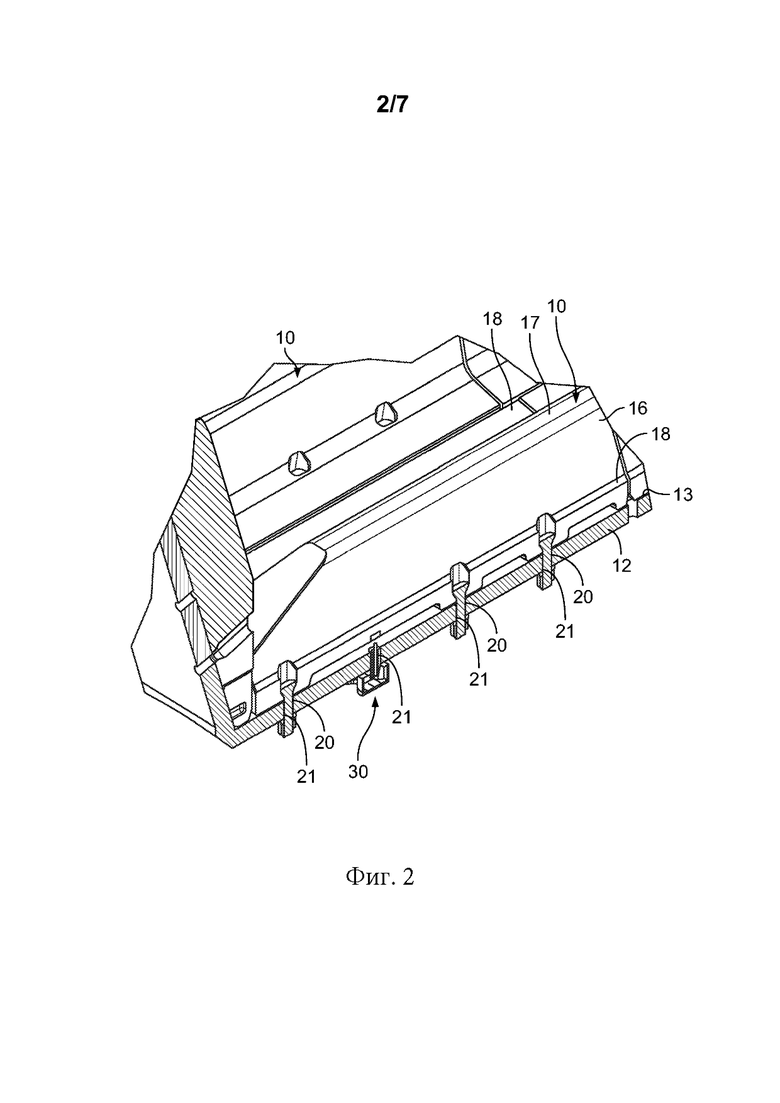
[0017] На фиг. 2 показано увеличенное изображение частичного разреза, демонстрирующее два футеровочных узла, установленных на кожухе мельницы.
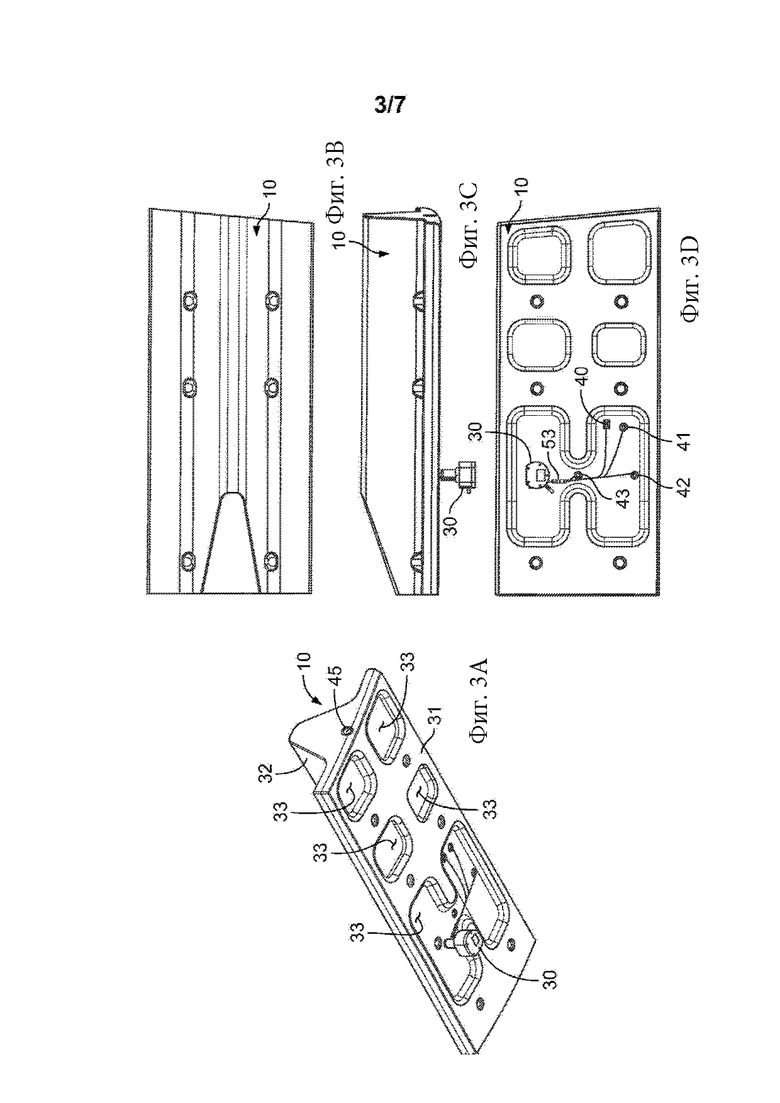
[0018] На фиг. 3А-3D показан вид в перспективе снизу, вид сверху, вид сбоку и вид снизу футеровочного узла, соответственно.
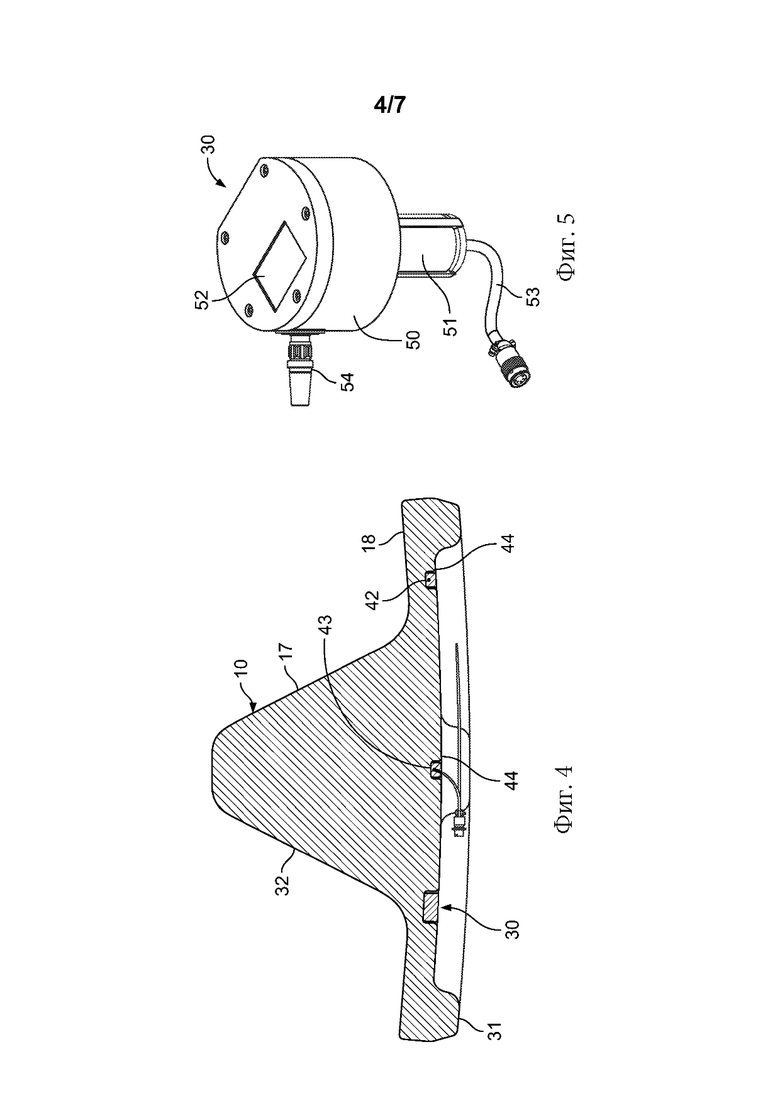
[0019] На фиг. 4 показан вид футеровочного узла в разрезе.
[0020] На фиг. 5 показан вид сверху в перспективе блока передачи данных, предназначенного для использования в футеровочном узле.
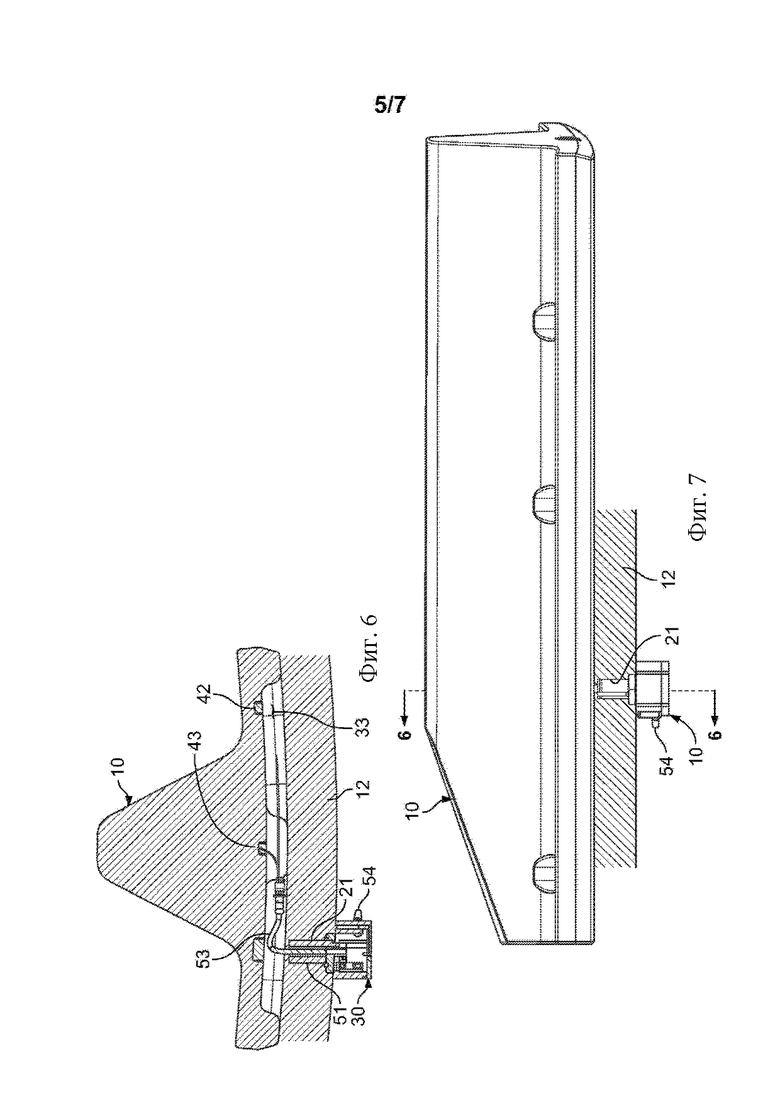
[0021] На фиг. 6 показан вид в разрезе футеровочного узла, установленного на кожухе мельницы.
[0022] На фиг. 7 показан вид сбоку футеровочного узла, установленного на кожухе мельницы.
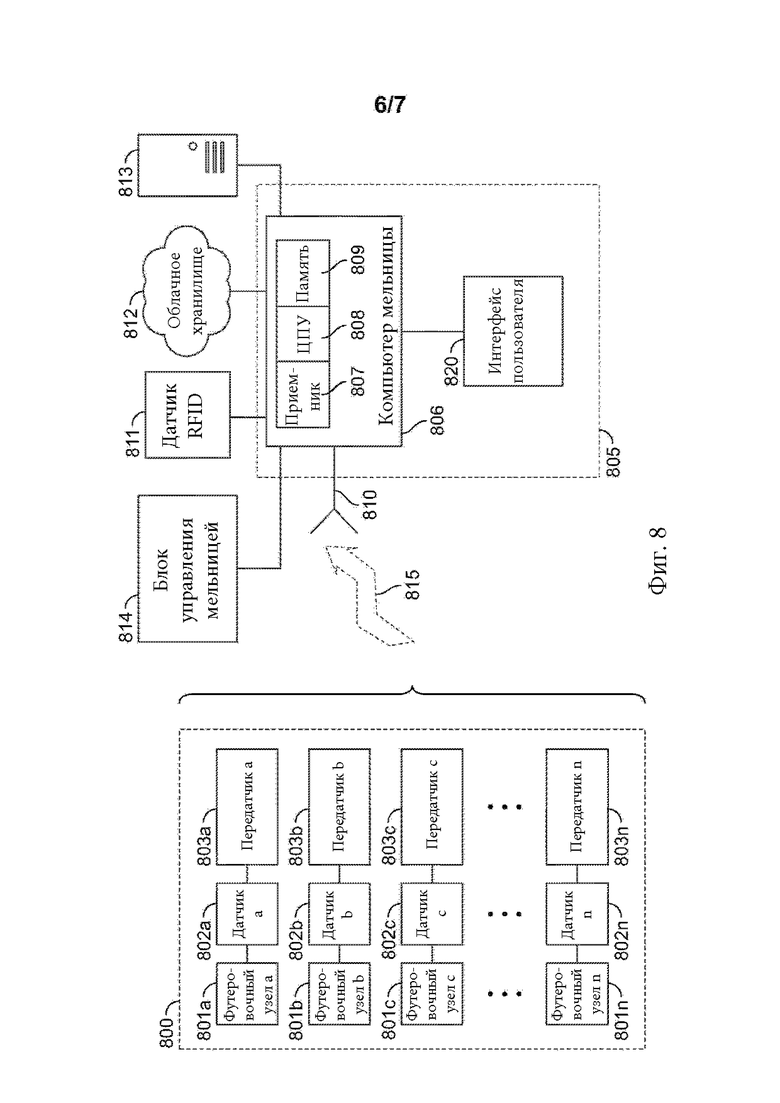
[0023] На фиг. 8 показана блок-схема системы, используемой совместно с различными датчиками, установленными в футеровочном узле.
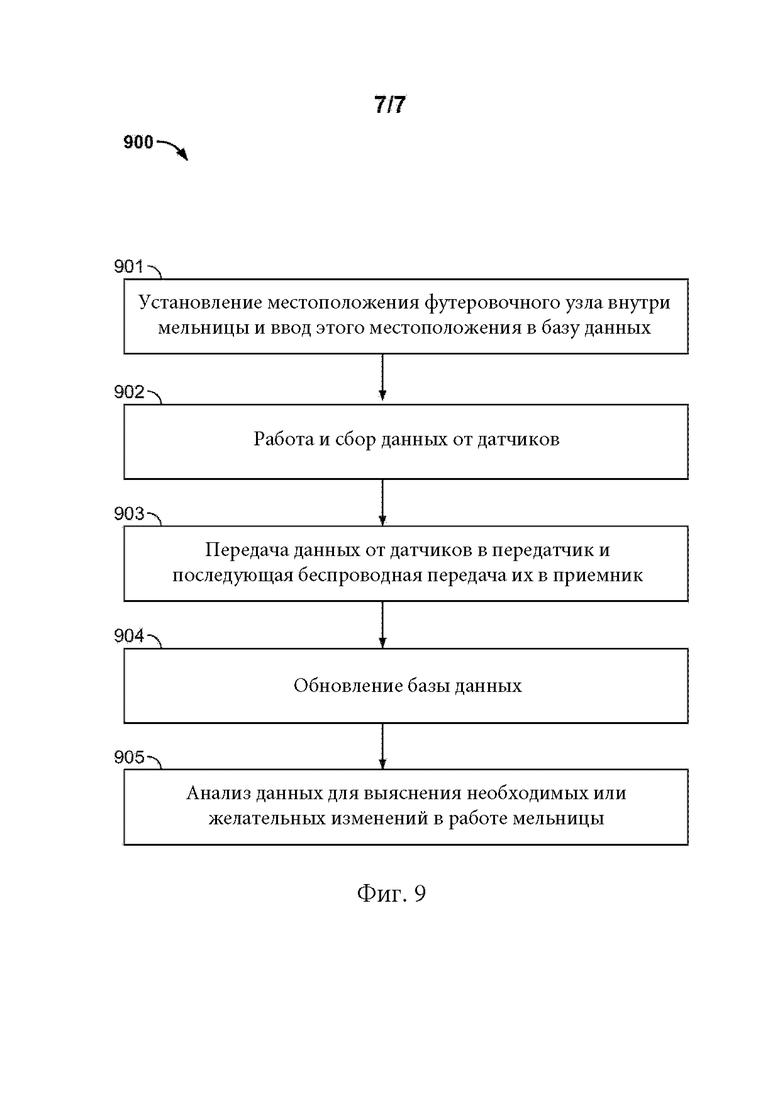
[0024] На фиг. 9 иллюстрируются этапы способа, которые могут быть использованы при практической реализации принципов настоящего изобретения.
Подробное описание изобретения
[0025] Обратимся к чертежам, на которых одинаковыми позициями обозначены одинаковые узлы. На фиг. 1 показано изображение частичного разреза рудоизмельчительной мельницы 11, оборудованной множеством футеровочных узлов 10. Футеровочные узлы 10 предохраняют кожух 12 мельницы 11 во время ее работы, когда происходит измельчение руды. Футеровочные узлы 10 установлены вдоль внутренней поверхности цилиндрической боковой стенки 13 кожуха 12, а также на внутренней поверхности противоположных торцевых стенок 14 и 15. Футеровочные узлы 10, смонтированные на боковой стенке 13, отличаются по форме и расположению от футеровочных узлов 10 на торцевых стенках 14 и 15, но включают признаки и элементы согласно настоящему изобретению, описанные здесь. Хотя настоящее описание относится только к футеровочный узлам 10 на цилиндрической боковой стенке 13, но очевидно, что оно справедливо и по отношению к футеровочным узлам на торцевых стенках 14 и 15.
[0026] На фиг. 2 более подробно показано два футеровочных узла 10, смонтированных на кожухе 12. Здесь делается ссылка только на один футеровочный узел 10. Футеровочный узел 10 имеет тело 16, содержащее центральный гребень 17 и противолежащие боковые фланцы 18. Тело 16 имеет вытянутую форму, а гребень 17 и фланцы 18 идут вдоль длины тела 16. Гребень 17 выступает вверх относительно фланцев 18 и представляет собой выступающее место для соударения с рудой, когда она перекатывается внутри мельницы 11. У гребня 17 имеется две поверхности соударения, расположенные под углом друг к другу и под углом к фланцам 18.
[0027] Футеровочный узел 10 прикреплен к кожуху 12 множеством болтов 20. Болты 20 проходят через отверстия 21 в кожухе 12 и фиксируются гайками 22 на внешней стороне кожуха 12, где можно получить доступ к каждой гайке 22 и затянуть или ослабить ее на конкретном болте 20. Болты 20 имеют увеличенные головки, которые садятся в отверстия 23 в одном из фланцев 18 футеровочного узла 10, плотно и надежно фиксируя футеровочный узел 10 в кожухе 12. Отверстия 21 заранее сформированы в кожухе 12 производителем мельницы 11, а отверстия 23 в футеровочном узле 10 выполнены соосно с отверстиями 21. Однако не все отверстия 21 в кожухе 12 соответствуют отверстиям 23 в футеровочном узле 10. По меньшей мере одно отверстие 21 под каждым футеровочным узлом 10 занято блоком 30 передачи данных (Data Transmission unit, DTU). Блок 30 передачи данных соединен с различными инструментами для сбора данных на футеровочном узле 10.
[0028] На фиг. 3А показан вид снизу футеровочного узла 10, демонстрирующий внутреннюю поверхность 31, которая примыкает к кожуху 12 при монтаже футеровочного узла 10 на него и которая противоположна внешней изнашиваемой поверхности 32, взаимодействующей с загрузкой и рудой. В футеровочном узле 10 со стороны внутренней поверхности 31 выполнено несколько углублений, определяющих полости 33. В этих полостях 33 предпочтительно смонтированы инструменты для сбора данных.
[0029] Как показано на фиг. 3D, внутри Н-образной полости 33 расположены инерциальный датчик 40, акустический датчик 41 и два ультразвуковых датчика 42 и 43. Каждый из этих датчиков 40-43 связан посредством проводной передачи данных с блоком 30 передачи данных. Датчики 40-43 собирают информацию о работе мельницы 11, состояниях загрузки и материала и состоянии самого футеровочного узла 10.
[0030] Инерциальный датчик 40 содержит как акселерометр, так и инклинометр. При соединении через блок 30 передачи данных с компьютером (как более подробно описано ниже) инерциальный датчик 40 предоставляет информацию о движении мельницы 11. Инерциальный датчик 40 записывает данные об ускорении вращения и скорости мельницы 11. Инклинометр предоставляет информацию об угле футеровочного узла 10, по которому компьютер может определить положение футеровочного узла 10 в мельнице 11. Другими словами, на основе наклона инерциального датчика 40 компьютер может определить, например, находится ли при вращении футеровочный узел внизу мельницы 11, наверху мельницы 11 или где-нибудь между ними. Таким образом, компьютер может определить ориентацию гребня 17 и изнашиваемых поверхностей гребня 17.
[0031] Акустический датчик 41 регистрирует информацию об ударах по изнашиваемой поверхности 32 футеровочного узла 10. Акустический датчик 41 может измерять количество, частоту и интенсивность ударов загрузки и материала по футеровочному узлу 10. Интенсивность ударов соответствует долям ударов загрузки и материала по футеровочному узлу 10, и, таким образом, оператор может определить, сколько руды ударяется в футеровочный узел 10 по сравнению с ударами загрузки. Удары с различными долями материала и загрузки приводят к разной эффективности измельчения, и, таким образом, знание типа соударений внутри мельницы 11 полезно при анализе того, насколько эффективно идет измельчение руды. Кроме того, интенсивность ударов соответствует обстоятельствам ударов, а именно, падает ли материал и загрузка на себя или падает на изнашиваемые поверхности футеровочных узлов 10. Это, кроме того, влияет как на эффективность измельчения, так и на износ футеровочных узлов 10. Комбинируя эти данные с данными, полученными от инерциального датчика 40, оператор мельницы может определить, как угловая скорость мельницы 11 влияет на эффективность измельчения и износ футеровочных узлов 10. Затем оператор может отрегулировать скорость мельницы 11 так, чтобы повысить или понизить эффективность измельчения, ускорить или замедлить измельчение, повысить или понизить температуру и т.д.
[0032] Ультразвуковые датчики 42 и 43 показаны на фиг. 3D и фиг. 4. Датчики 42 и 43 смонтированы внутри малых гнезд или посадочных мест 44 в полости 33. Один ультразвуковой датчик 43 смонтирован под гребнем 17, а другой смонтирован под фланцем 18. Ультразвуковые датчики 42 и 43 излучают ультразвуковые волны внутрь тела футеровочного узла 10. Эти волны распространяются внутри тела и некоторые из них возвращаются к датчикам 42 и 43, которые их принимают. Датчики 42 и 43 собирают эти данные и передают их в блок 30 передачи данных. Компьютер, соединенный с блоком 30 передачи данных, может интерпретировать данные для определения того, насколько сильно изнашиваемая поверхность 32 футеровочного узла 10 износилась или повреждена ли она. Когда обнаружен пороговый уровень износа, оператор мельницы дает команду на замену футеровочного узла 10.
[0033] Когда необходима замена, оператор мельницы может легко идентифицировать футеровочный узел 10. Как видно на фиг. 3А, футеровочный узел 10 содержит метку 45 радиочастотной идентификации. Метка 45 радиочастотной идентификации закреплена на конце футеровочного узла 10 и связана беспроводной передачей данных с блоком 30 передачи данных. Метка 45 радиочастотной идентификации программируется идентификационной информацией, когда тело 16 футеровочного узла 10 формуется, и крепится к телу 16 только после его термообработки. Таким образом, метка 45 радиочастотной идентификации используется для идентификации футеровочного узла 10 не только во время работы футеровочного узла 10, но и до, и после. Фабрика, которая создает тело 16 футеровочного узла 10, отслеживает его перемещение по производственным площадкам с помощью метки 45 радиочастотной идентификации, отслеживает установку блока 30 передачи данных и датчиков 40-43 в тело 16 и отслеживает отгрузку и доставку футеровочного узла 10. Когда футеровочный узел 10 устанавливают в мельницу 11 во время начальной сборки или замены, данные и время установки записывают и ассоциируют с меткой 45 радиочастотной идентификации, так чтобы был известен точный срок службы футеровочного узла 10. Таким образом, автоматические и электронные отчеты могут храниться для каждого футеровочного узла 10 в течение всего его жизненного цикла. Когда футеровочный узел 10 необходимо демонтировать, его можно быстро найти по метке 45 радиочастотной идентификации.
[0034] Блок 30 передачи данных на каждом футеровочном узле 10 обеспечивает связь между датчиками 40-43, меткой 45 радиочастотной идентификации и компьютером оператора мельницы. На фиг. 5 подробно показан блок 30 передачи данных. Блок 30 передачи данных содержит жесткий корпус 50 с более узким штырем 51. Корпус 50 содержит внутренний источник энергии, такой как батарея, и программируемый контроллер, связанный с жидкокристаллическим дисплеем 52, расположенным на головном конце блока 30 передачи данных и предназначенным для отображения информации, относящейся к блоку 30 передачи данных и к датчикам 40-43. Контроллер внутри корпуса 50 связан с датчиками 40-43 соединительным кабелем 53, выходящим из конца штыря 51. Как видно на фиг. 6, кабель 53 проходит через полость 33 из штыря 51 к датчикам 40-43. На втором виде на фиг. 6 показан кабель 53, соединенный только с ультразвуковым датчиком 43, но на фиг. 3D показано, что кабель 53 соединен со всеми датчиками 40-43. Таким образом, между блоком 30 передачи данных и датчиками 40-43 имеется физическое проводное соединение, тогда как между блоком 30 передачи данных и меткой 45 радиочастотной идентификации имеется беспроводное соединение.
[0035] Кроме того, на фиг. 6 и фиг. 7 показано, как блок 30 передачи данных смонтирован в кожухе 12. Вместо встраивания в футеровочный узел 10 блок 30 передачи данных устанавливают в отверстие 21. Штырь 51 вставляют скользящей посадкой в отверстие 21 и прикрепляют зажимами или болтами к кожуху 12. Для предотвращения возможности утечки гидросмеси через отверстие 21, между отверстием 21 и блоком 30 передачи данных зажимают прокладку. Длина штыря 51 приблизительно равна толщине кожуха 12, и штырь 51 проходит через кожух 12 в отверстие 21 к полости 33. При этом головной конец блока 30 передачи данных располагается с внешней стороны кожуха 12 так, чтобы был виден дисплей 52. Кроме того, в головном конце имеется антенна 54. Антенна 54 связывает блок 30 передачи данных с беспроводной сетью передачи данных, так что компьютер оператора мельницы может соединяться с блоком 30 передачи данных, датчиками 40-43 и меткой 45 радиочастотной идентификации.
[0036] На фиг. 8 показана блок-схема согласно варианту осуществления настоящего изобретения. Кожух мельницы показан штриховой линией 800. Внутри кожуха 800 мельницы находится цилиндрический кожух 12 мельницы и конические головки мельницы на подающем конце и разгрузочном конце. Множество футеровочных узлов 801а, 801b, 801с…801n могут быть установлены и сконфигурированы в соответствии с описанием футеровочного узла 12, приведенным выше. Кроме того, каждый соответствующий футеровочный узел 801а-801n предпочтительно содержит по меньшей мере один соответствующий датчик 802а, 802b, 802с…802n и соответствующий передатчик 803а, 803b, 803с…803n.
[0037] В одном из вариантов осуществления настоящего изобретения каждый из футеровочных узлов 801а-801n содержит множество датчиков, включая метку радиочастотной идентификации, инклинометр, акустический датчик, инерциальный датчик и ультразвуковой датчик. Однако очевидно, что количество датчиков в каждом футеровочном узле 801а-801n может меняться. Например, в футеровочных узлах, расположенных на конических головках мельницы, может быть нецелесообразно устанавливать все датчики на каждом футеровочном узле. Таким образом, блоки 802а-802n в общем случае содержат по меньшей мере от одного датчика до нескольких датчиков.
[0038] Примеры датчиков, которые могут использоваться в настоящем изобретении, включают следующие. Акселерометр (инерциальный датчик) представляет собой трехосевое коммерческое устройство модели ADXL337, производимое компанией Analog Devices, Норвуд, Массачусетс. Акустический датчик представляет собой акустический датчик вибрации модели 29132 фирмы Parallax, Inc., Роклин, Калифорния. Один передатчик данных, который может использоваться в качестве части блока передачи данных, коммерчески доступен под названием «Photon» в компании Particle's Internet of Things, Сан-Франциско, Калифорния. Ультразвуковые датчики для использования в качестве неразрушающих толщиномеров коммерчески доступны от многих производителей (например, Cygnus Instruments, Джэксонвилль, Флорида).
[0039] Компьютер 806 мельницы содержит приемник 807, процессор или центральный процессор 808 и память 809. Компьютер может быть персональным компьютером или компьютером специального назначения. Монитор и соответствующие устройства интерфейса пользователя, такие как устройство ввода (то есть, «мышь» и клавиатура) показаны в виде блока 820. Компьютер 806 мельницы и интерфейс 820 пользователя совместно составляют блок оценки работы мельницы, обозначенный позицией 805. Например, данные, принятые от датчиков 802а-802n, могут быть собраны в крупноформатную таблицу в режиме реального времени, так чтобы пользователь мог наблюдать эти данные в блоке 805 оценки работы мельницы и внести изменения в работу мельницы и/или решить, что один или более футеровочных узлов 801а-801n истончились или износились иным образом и нуждаются в замене. Профиль износа для футеровочных узлов 801а-801n предпочтительно определяется так, чтобы пользователь был способен на основании данных определить, когда достигнут уровень износа и желательна замена любого отдельного футеровочного узла 801а-801n. Кроме того, компьютер 806 предпочтительно соединен с блоком 814 управления мельницей, чтобы пользователь мог регулировать рабочие параметры мельницы (то есть, помимо прочего, такие, как скорость мельницы и скорость подачи руды) на основе данных, принятых из различных датчиков 802а-802n.
[0040] Антенна 810 принимает данные от множества передатчиков 803а-803n. Антенна соединена с приемником 807. Множество радиосигналов показано стрелкой 815. Для хранения данных компьютер 806 содержит память 809, а также предпочтительно связан с облачным хранилищем 812 и/или сервером 813.
[0041] Кроме того, компьютер 806 связан с датчиком 811 метки радиочастотной идентификации. Датчик 811 метки радиочастотной идентификации может использоваться для определения местоположения конкретного футеровочного узла 801 путем сканирования метки радиочастотной идентификации в футеровочном узле во время установки футеровочного узла внутрь мельницы 800. При этом местоположение футеровочного узла и его соответствующих датчиков будет известно (или зарегистрировано) как внутри мельницы 800, так и относительно положения других футеровочных узлов 801а-801n.
[0042] На фиг. 9 показана последовательность 900 операций, которые могут быть выполнены во время работы. На шаге 901 устанавливают футеровочные узлы 10 внутри мельницы. Если это начальная установка футеровочных узлов 10 в соответствии с принципами настоящего изобретения, тогда устанавливают каждый из футеровочных узлов 10 и его конкретное положение записывают с использованием датчика 811 метки радиочастотной идентификации и добавляют в базу данных, таблицу или другой массив представления информации (для удобства называемый «базой данных») в компьютере 806. Таким образом, метка радиочастотной идентификации помогает идентифицировать, из какого футеровочного узла 10 приходят данные, выдаваемые множеством датчиков 802а-802n. После начальной установки измельчительную мельницу можно периодически останавливать для замены футеровочных узлов 10, которые достигли заранее заданной степени износа по толщине или другого заранее заданного профиля износа. Поставляемые на замену футеровочные узлы 10 предпочтительно также содержат метку радиочастотной идентификации, помогающую регистрировать местоположение конкретного футеровочного узла внутри мельницы.
[0043] На шаге 902 управляют работой мельницы, и датчики 802а-802n выдают данные в соответствующий блок 30 передачи данных. На шаге 903 блоки 30 передачи данных принимают данные от датчиков 802а-802n. Данные могут временно храниться для пакетной передачи или могут передаваться в реальном времени. Если будет использована пакетная передача, то специалистам в данной области техники, очевидно, что предпочтительнее организовать относительно более короткий промежуток времени между передачами, чтобы оператор или пользователь мог наблюдать считанные данные через блок 805 оценки производительности мельницы. Данные беспроводным способом передают от блоков 30 передачи данных и передатчиков 803а-803n к антенне 810. На шаге 904 центральный процессор 808 перемещает данные из приемника 807 и обновляет базу данных в памяти 809. По мере накопления данных они могут храниться в облачном хранилище 812 или на сервере 813. Кроме того, перемещая данные в одну или обе из этих областей, можно просматривать данные дистанционно.
[0044] На шаге 905 обновленную базу данных предоставляют оператору через интерфейс 820 пользователя. На основе данных от различных датчиков пользователь может решить, что изменение в работе мельницы желательно или необходимо. Кроме того, данные могут указывать, что один или более футеровочных узлов 10 следует заменить, например, потому, что достигнут некоторый профиль износа и/или датчик вышел из строя. Меры, которые может предпринять оператор, анализирующий данные, перечислены в таблице 1.
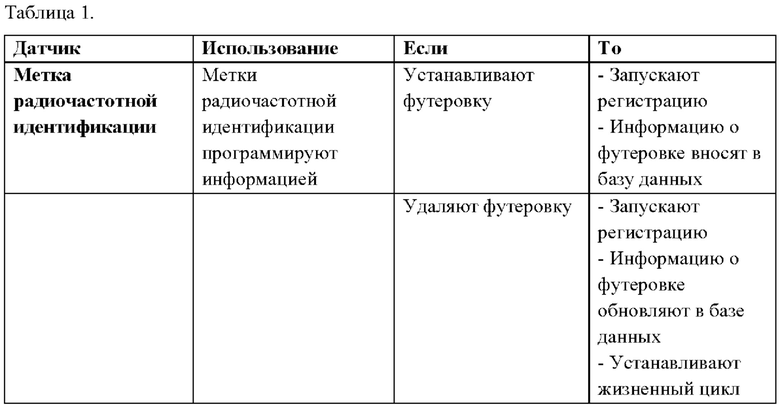
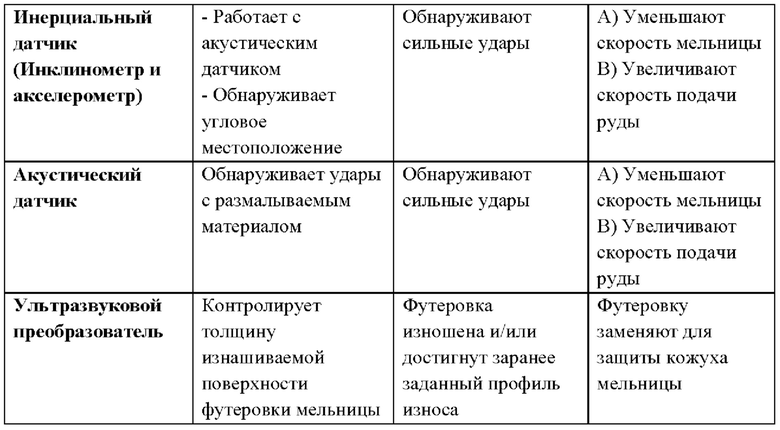
[0045] Как видно из таблицы 1, при возникновении определенных условий можно принять меры, чтобы повысить эффективность работы мельницы. Кроме того, эффективность поддержания мельницы в работе до необходимой замены футеровочных узлов 10 максимизируется.
[0046] Выше полностью и ясно описан вариант осуществления настоящего изобретения, что позволяет специалисту в данной области техники понять, осуществить и использовать изобретение. Специалистам, очевидно, что в изложенном выше описании можно сделать изменения без отхода от сути изобретения, и что некоторые варианты осуществления настоящего изобретения включают только описанные узлы и признаки или их подмножество. Подразумевается, что до тех пор, пока такие изменения не отходят от сути изобретения, они входят в объем изобретения.
[0047] Очевидно, что хотя в вышеизложенном описании сформулированы многочисленные признаки и преимущества настоящего изобретения вместе с деталями конструкции и функций, настоящее раскрытие призвано лишь иллюстрировать их, и в деталях могут быть произведены изменения, в особенности с точки зрения вспомогательных средств, компонентов и устройств и в самом широком значении терминов, с использованием которых сформулированы пункты формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ИЗМЕЛЬЧИТЕЛЬНЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2779916C1 |
| УСТРОЙСТВО, СИСТЕМЫ И СПОСОБЫ ДЛЯ ОБНАРУЖЕНИЯ И МОДЕЛИРОВАНИЯ ПОВЕДЕНИЯ ЗАГРУЗКИ МЕЛЬНИЦЫ | 2021 |
|
RU2819754C2 |
| МЕЛЮЩАЯ СРЕДА, СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ КОНТУРА ИЗМЕЛЬЧЕНИЯ | 2019 |
|
RU2775723C2 |
| Способ автоматического регули-РОВАНия зАгРузКи шАРОВ B бАРАбАН-Ную МЕльНицу | 1979 |
|
SU797765A1 |
| Способ автоматического контроля барабанной мельницы | 1987 |
|
SU1607952A1 |
| УСТРОЙСТВО ДЛЯ ПОДВЕШИВАНИЯ И НАПРАВЛЕНИЯ ИНСТРУМЕНТОВ И ПЛАТФОРМ ОТНОСИТЕЛЬНО МЕЛЬНИЦЫ | 2016 |
|
RU2715275C2 |
| Измельчитель истирающего действия | 1980 |
|
SU874172A1 |
| ФУТЕРОВОЧНАЯ ПЛИТА | 1989 |
|
RU2016658C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НЕФТЕПРОМЫСЛОВОГО ОБОРУДОВАНИЯ | 2013 |
|
RU2514870C1 |
| БРОНЕФУТЕРОВКА БАРАБАННОЙ МЕЛЬНИЦЫ | 1991 |
|
RU2028818C1 |
Группа изобретений относится к футеровочному узлу для измельчительной мельницы, системе для контроля работы измельчительной мельницы с вышеуказанным футеровочным узлом и способу определения времени для замены вышеуказанного футеровочного узла. Футеровочный узел содержит тело, расположенное внутри измельчительной мельницы и имеющее полости, сформированные в части этого тела, ультразвуковой датчик, расположенный в полости в теле с возможностью измерения изменения глубины тела, акустический датчик, расположенный в полости в теле с возможностью генерации сигнала, соответствующего количеству ударов по телу материала и загрузки во время работы измельчительной мельницы, и блок передачи данных, расположенный снаружи измельчительной мельницы и соединенный с ультразвуковым и акустическим датчиками посредством проводной связи и принимающий данные об изменении глубины тела и о количестве ударов по телу для последующей передачи. Система для контроля работы измельчительной мельницы с вышеуказанными футеровочными узлами содержит множество таких футеровочных узлов, расположенных внутри измельчительной мельницы в заданном положении, множество датчиков и передатчиков. Каждый футеровочный узел содержит датчики, выполненные с возможностью контролировать и выдавать первый сигнал для параметра износа и второй сигнал для по меньшей мере одного из следующих параметров: количество ударов материала и загрузки по соответствующему футеровочному узлу во время работы измельчительной мельницы, интенсивность этих ударов и относительное положение соответствующего футеровочного узла внутри измельчительной мельницы, внутри соответствующего футеровочного узла. Каждый передатчик обеспечивает прием выдаваемых первого и второго сигналов, причем передатчики передают первые и вторые сигналы для сравнения с заранее заданными эталонными значениями. Способ определения времени для замены вышеуказанного футеровочного узла заключается в размещении ультразвукового датчика для измерения профиля износа внутри футеровочного узла, при этом датчик располагают полностью внутри полости сформированной в футеровочном узле, в регистрации положения футеровочного узла во время его установки внутри измельчительной мельницы с использованием метки радиочастотной идентификации, в результате чего положение датчика внутри измельчительной мельницы также становится известно, и контроле выходного сигнала ультразвукового датчика для определения подходящего времени для замены футеровочного узла на основе упомянутого профиля износа. Использование вышеуказанных футеровочных узлов и мельниц с такими футеровочными узлами повышает технологичность измельчающего оборудования. 3 н. и 12 з.п. ф-лы, 9 ил., 1 табл.
1. Футеровочный узел, используемый внутри измельчительной мельницы в качестве детали, изнашиваемой под воздействием материала и загрузки, и содержащий:
a) тело, имеющее длину, ширину и глубину, расположенное внутри измельчительной мельницы и имеющее полости, сформированные в части этого тела;
b) ультразвуковой датчик, расположенный в полости в теле, при этом ультразвуковой датчик установлен и выполнен с возможностью измерения изменения глубины тела;
c) акустический датчик, расположенный в полости в теле, при этом акустический датчик установлен и выполнен с возможностью генерации сигнала, соответствующего количеству ударов материала и загрузки по упомянутому телу во время работы измельчительной мельницы; и
d) расположенный снаружи измельчительной мельницы блок передачи данных, соединенный с ультразвуковым и акустическим датчиками посредством проводной связи и принимающий данные об изменении глубины тела и о количестве ударов по телу для последующей передачи.
2. Футеровочный узел по п. 1, также содержащий акселерометрический датчик, расположенный в полости в теле, при этом акселерометрический датчик установлен и выполнен с возможностью генерации сигнала, соответствующего интенсивности ударов материала и загрузки по телу во время работы измельчительной мельницы.
3. Футеровочный узел по п. 1, также содержащий инерциальный датчик, расположенный в полости в теле и выполненный с возможностью генерации сигнала, соответствующего относительному положению тела внутри измельчительной мельницы во время ее работы.
4. Футеровочный узел по п. 1, который также содержит метку радиочастотной идентификации, посредством которой регистрируется местоположение тела внутри измельчительной мельницы после установки тела внутри этой мельницы.
5. Футеровочный узел по п. 1, также содержащий:
i) акселерометрический датчик для генерации сигнала, соответствующего интенсивности ударов материала и загрузки по телу во время работы измельчительной мельницы;
ii) инерциальный датчик для генерации сигнала, соответствующего относительному положению тела внутри измельчительной мельницы во время ее работы; и
iii) метку радиочастотной идентификации, посредством которой регистрируется местоположение тела внутри измельчительной мельницы после установки тела внутри этой мельницы.
6. Футеровочный узел по п. 1, в котором блок передачи данных также включает часть, которая располагается по меньшей мере частично внутри упомянутого тела.
7. Система для контроля работы измельчительной мельницы с футеровочными узлами по п. 1, содержащая:
a) множество футеровочных узлов, расположенных внутри измельчительной мельницы в заданном положении;
b) множество датчиков, при этом каждый футеровочный узел содержит датчики, выполненные с возможностью контролировать и выдавать первый сигнал для параметра износа и второй сигнал для по меньшей мере одного из следующих параметров: количество ударов материала и загрузки по соответствующему футеровочному узлу во время работы измельчительной мельницы, интенсивность этих ударов и относительное положение соответствующего футеровочного узла внутри измельчительной мельницы, внутри соответствующего футеровочного узла; и
c) множество передатчиков, каждый из которых при работе принимает выдаваемые первый и второй сигналы от датчиков, при этом множество передатчиков передает первые и вторые сигналы для сравнения с заранее заданными эталонными значениями.
8. Система по п. 7, в которой один из датчиков каждой пары датчиков представляет собой ультразвуковой датчик.
9. Система по п. 7, также содержащая: приемник для приема переданных сигналов; память для хранения заранее заданных эталонных значений; и процессор для сравнения принятых первых сигналов с заранее заданными эталонными значениями.
10. Система по п. 9, также содержащая множество меток радиочастотной идентификации, имеющих уникальные идентификаторы, при этом индивидуальные метки радиочастотной идентификации ассоциированы с соответствующими футеровочными узлами, а уникальный идентификатор метки радиочастотной идентификации передается вместе с первыми и вторыми сигналами, в результате чего эталонные значения ассоциируются с соответствующими футеровочными узлами.
11. Система по п. 10, в которой в каждый из футеровочных узлов включены один или более дополнительных датчиков, которые генерируют третьи сигналы, соответствующие рабочим параметрам мельницы, при этом упомянутые дополнительные датчики выбраны из следующей группы: инерциальный датчик, акселерометр, инклинометр и акустический датчик.
12. Система по п. 11, в которой третьи сигналы передаются в приемник и выдаются процессором в устройство отображения, при этом работу мельницы можно анализировать в режиме реального времени на основе параметров первых, вторых и третьих сигналов и можно вносить изменения в работу мельницы.
13. Система по п. 12, также обеспечивающая передачу первых, вторых и третьих сигналов в удаленное местоположение.
14. Способ определения времени для замены футеровочного узла по п. 1 внутри измельчительной мельницы, включающий:
a) размещение ультразвукового датчика для измерения профиля износа внутри футеровочного узла, при этом датчик располагают полностью внутри полости сформированной в футеровочном узле;
b) регистрацию положения футеровочного узла во время его установки внутри измельчительной мельницы с использованием метки радиочастотной идентификации, в результате чего положение датчика внутри измельчительной мельницы также становится известно; и
с) контроль выходного сигнала ультразвукового датчика для определения подходящего времени для замены футеровочного узла на основе упомянутого профиля износа.
15. Способ по п. 14, также включающий передачу выходного сигнала ультразвукового датчика в компьютер для сравнения с сохраненным заранее заданным профилем износа.
| AU 2016201314 A1, 17.03.2016 | |||
| US 7172144 B1, 06.02.2007 | |||
| Устройство для диагностики состояния измельчительного агрегата | 1984 |
|
SU1192855A1 |
| Устройство для автоматического контроля износа шаров в мельнице | 1991 |
|
SU1789271A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |

