Изобретение относится к области морской техники, предназначено для обеспечения приема/выпуска, хранения, транспортировки, приема и выпуска автономного необитаемого подводного аппарата (далее - АНПА) в открытом море и может быть использовано как на открытых от льда акваториях, так и покрытых льдом круглогодично или большую часть года.
Известно донное причальное устройство (далее - ДПУ) АНПА, описанное в изобретении «Система приведения автономного необитаемого подводного аппарата к донному причальному устройству», патент RU 2750550 С1, кл. В63G 8/00, G01S 15/00, H01M 10/46, G01S 1/08, и содержащее причальный конус, измеритель дистанции, Ethernet-антенну, корпус причального устройства, стопорное устройство, аппаратуру управления и опору.
Основными недостатками данного варианта конструкции ДПУ являются:
- необходимость точного позиционирования АНПА в донном причальном устройстве в обеспечение стопорения и передачи АНПА электрической энергии;
- отсутствие сигнализации крайних положений АНПА в ДПУ и исполнительных механизмов ДПУ;
- необходимость прокладки дополнительного ведущего кабеля по дну водоема с заземлением, что существенно усложняет и ограничивает глубину установки ДПУ;
- отсутствие вспомогательных механизмов, обеспечивающих активную помощь при заходе АНПА в ДПУ;
- возможность установки только на морском дне;
- отсутствие визуализации процесса приема/выхода АНПА в/из ДПУ.
Наиболее близким по совокупности признаков с заявляемым изобретением, взятым за прототип, является донное причальное устройство АНПА типа «Bluefin», разработанное в институте Monterey Bay Aquarium Research Institute (MBARI), описанное в журнале «Двойные технологии», выпуск №1 (54) 2011. ДПУ содержит элемент несущей конструкции, на которой размещен прочный контейнер с аппаратурой, а также привод фиксатора АНПА, в который интегрированы бесконтактное устройство информационного обмена и бесконтактное устройство зарядки аккумуляторных батарей. На верхнем торце элемента несущей конструкции закреплен корпус причального устройства цилиндрической формы, на котором установлен измеритель дистанции и Ethernet-антенна. При этом на переднем торце корпусе причального устройства закреплен причальный конус с интегрированным гидроакустическим маяком.
К основным недостаткам донного причального устройство АНПА типа «Bluefin» можно отнести:
- необходимость точного позиционирования АНПА, за счет собственного движителя, в ДПУ для обеспечения ввода штанги (со встроенным индуктором) с целью стопорения АНПА и передачи ему электрической энергии, что в отсутствии вспомогательных механизмов, обеспечивающих активную помощь при заходе АНПА в ДПУ усложняет процесс приема аппарата;
- отсутствие сигнализации крайних положений АНПА в ДПУ, а также вспомогательных исполнительных механизмов ДПУ, в обеспечении надежности фиксации АНПА в ДПУ;
- отсутствие вспомогательной световой системы приведения АНПА к ДПУ;
- возможность установки только на морском дне;
- отсутствие визуализации процесса приема/выхода АНПА в/из ДПУ.
Задачей изобретения является обеспечение функционирования причального устройства как на морском дне, так и в толще воды, повышение точности приведения АНПА к причальному устройству, контроль позиционирования АНПА в причальном устройстве, реализация активной помощи приема/выпуска АНПА, а также сокращение времени на прием АНПА в причальное устройство и на приведение АНПА к причальному устройству.
Поставленная задача решается тем, что причальное устройство для приема/выпуска, хранения, транспортировки и удержания автономного необитаемого подводного аппарата в открытом море, выполненное с возможностью размещения как на дне, так и в толще воды содержит корпус причального устройства, элемент несущей конструкции, гидроакустический маяк, прочный контейнер с аппаратурой, причальный конус, автономный необитаемый подводный аппарат, бесконтактное устройство информационного обмена, бесконтактное устройство зарядки аккумуляторных батарей, привод фиксатора автономного необитаемого подводного аппарата. Причем корпус причального устройства выполнен в виде рамной проницаемой конструкции, элемент несущей конструкции выполнен с возможностью демонтажа с корпуса причального устройства, также корпус причального устройства снабжен, по меньшей мере, одним рым-болтом, по меньшей мере, одной направляющей дорожкой, причальным конусом, снабженным, по меньшей мере, одним световым элементом системы приведения, также корпус причального устройства снабжен по меньшей мере, одним устройством протаскивания, в свою очередь снабженного прочным корпусом с электродвигателем, валом, роликом и подпружиненным кронштейном, для возможности прямолинейного перемещения автономного необитаемого подводного аппарата, стопорным устройством, в свою очередь снабженным электрическим сервоприводом и стопорным рычагом, а привод фиксатора выполнен в виде, по меньшей мере, одного устройства удержания, в свою очередь снабженного прочным корпусом с линейным электродвигателем, пружинным пакетом, тягой, рычагом и скобой, для возможности фиксации автономного необитаемого подводного аппарата в корпусе причального устройства, а также корпус причального устройства снабжен по меньшей мере, одним датчиком определения положения автономного необитаемого подводного аппарата в корпусе причального устройства, по меньшей мере, одним датчиком положения стопорного рычага, по меньшей мере, одним устройством видеовизуализации для возможности наблюдения за процессом приема/выпуска автономного необитаемого подводного аппарата в/из причального устройства.
Сущность заявляемого изобретения поясняется чертежами, где:
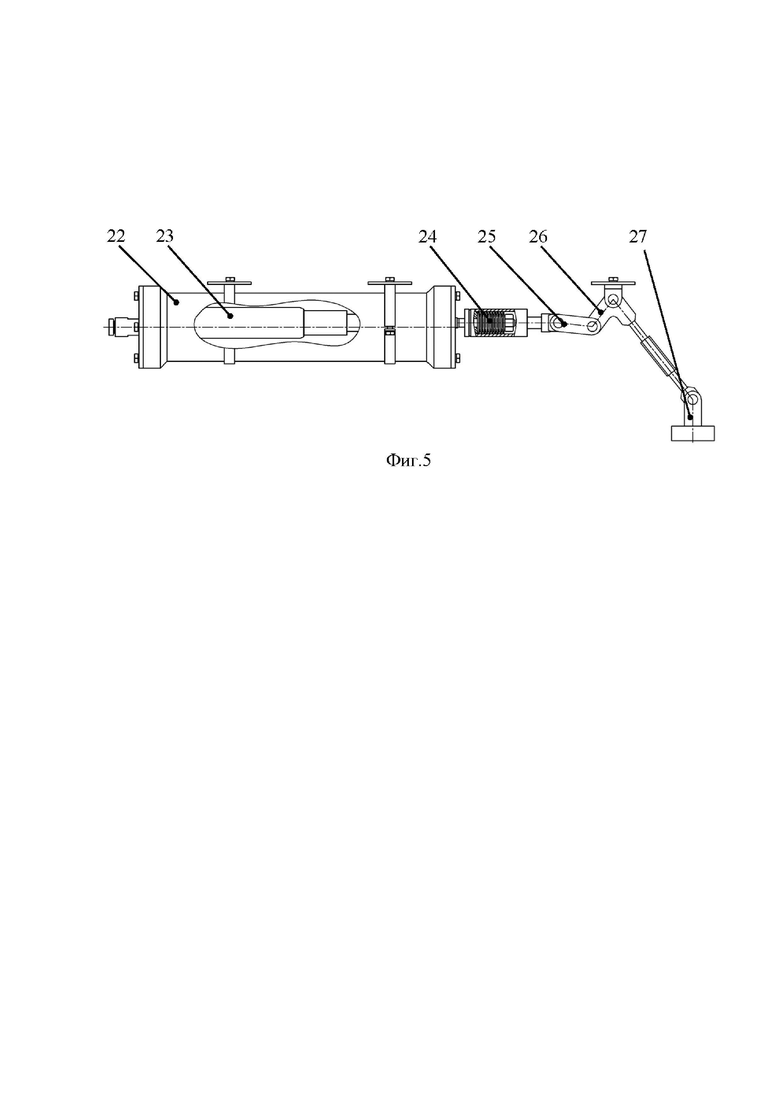
на фиг. 1 - общий вид (вид сбоку) предлагаемого причального устройства для приема/выпуска, хранения, транспортировки, а также удержания АНПА в открытом море;
на фиг. 2 - общий вид (вид сзади) предлагаемого причального устройства для приема/выпуска, хранения, транспортировки и удержания АНПА в открытом море;
на фиг.3 - общий вид устройства протаскивания;
на фиг.4 - общий вид стопорного устройства;
на фиг.5 - общий вид устройства удержания.
Причальное устройство для приема/выпуска, хранения, транспортировки, а также удержания АНПА в открытом море, содержит корпус причального устройства 1, выполненный в виде рамной проницаемой конструкции, установленной на элемент несущей конструкции 2, выполненной с возможностью демонтажа при необходимости (фиг. 1). На верхней торец корпуса причального устройства 1 установлен гидроакустический маяк 3 и прочный контейнер с аппаратурой 4, в котором размещена система управления причальным устройством. Причальный конус 5 закреплен на переднем торце корпуса причального устройства 1 и предназначен для направления движения АНПА 6 при его заходе в причальное устройство. Бесконтактное устройство информационного обмена 7, предназначено для бесконтактной передачи информации между АНПА 6 и системой управления причальным устройством. Бесконтактное устройство информационного обмена 7, и бесконтактное устройство зарядки аккумуляторных батарей 8 установлены на нижней поверхности корпуса причального устройства 1. В обеспечение погрузочно/разгрузочных работ, а также установки причального устройства в районе использования с борта судна-носителя, по углам верхней поверхности корпуса причального устройства 1 установлены рым-болты 9. Вдоль внутренней поверхности корпуса причального устройства 1 расположены направляющие дорожки 10, служащие направлением перемещения АНПА 6 и его ограничением перемещения по горизонтали и вертикали внутри корпуса причального устройства 1 в процессе приема/выпуска его в/из причального устройства (фиг. 2). На причальном конусе 5 установлены световые элементы системы приведения 11, обеспечивающие повышение точности приведения АНПА 6 к причальному устройству. Одновременно, корпус причального устройства 1 снабжен устройствами протаскивания 12, представляющие собой пару симметрично расположенных прочных корпусов 13 (фиг. 3), относительно оси приема АНПА 6 в корпусе причального устройства 1, внутри которых установлены электродвигатели 14 с валами 15 и роликами 16, размещенных на подпружиненных кронштейнах 17, обеспечивающих прямолинейное перемещение АНПА 6 вдоль направляющих дорожек 10 в процессе его приема/выпуска в/из причального устройства. В корпусе причального устройства 1 установлено стопорное устройство 18 (фиг. 4), снабженное электрическим сервоприводом 19 и стопорным рычагом 20, а также два датчика определения положения автономного необитаемого подводного аппарата 28 (фиг. 1). Привод фиксатора автономного необитаемого подводного аппарата выполнен в виде устройств удержания 21, состоящих из прочных корпусов 22 с линейным электродвигателем 23, пружинным пакетом 24, тягой 25, рычагом 26 и скобой 27 (фиг. 5), при этом датчики положения стопорного рычага 29 (фиг. 1, 2) установлены в районе крайнего положения стопорного рычага 20. Устройство видеовизуализации 30 (фиг. 1) закреплен на корпусе причального устройства 1.
Работа причального устройства происходит следующим образом:
Прием АНПА в причальное устройство.
Причальное устройство крепят к грузовому оборудованию судна-носителя через рым-болты 9, установленные на корпусе причального устройства 1, при необходимости состыкованного (в случае донной установки причального устройства) с элементом несущей конструкции 2, после чего перемещают за борт и устанавливают либо стационарно на морское дно, либо в толще воды. Посредством гидроакустического маяка 3, АНПА 6 приводят в зону действия световых элементов системы приведения 11, установленных на причальном конусе 5, обеспечивающих приведение АНПА 6 к причальному устройству. Причальный конус 5 обеспечивает направление движения АНПА 6 в процессе его захода в корпус причального устройства 1.
После прохождения АНПА 6 через причальный конус 5, АНПА 6 продвигается к направляющим дорожкам 10, ограничивающих вертикальную и горизонтальную составляющую движения. При последующем продольном движении АНПА 6 внутри корпуса причального устройства 1, на расстоянии, равном не менее расстояния от вершины носовой образующей АНПА 6 и его цилиндрической части корпуса, АНПА 6 подходит к устройству протаскивания 12 и происходит захват роликами 16, вращающимися, в обеспечение захвата АНПА 6, в направлении друг к другу, раздвигая подпружиненные кронштейны 17. Ролики 16 обжимают АНПА 6 и вращением обеспечивают его продольное перемещение вдоль направляющих дорожек 10, с последующим срабатыванием датчика определения положения АНПА 28 в корпусе причального устройства 1. Вращение роликов 16 обеспечивается, посредством вала 15, путем передачи на них вращательного движения от электродвигателей 14, установленных в прочных корпусах 13, закрепленных на подпружиненных кронштейнах 17. При захвате роликами 16 АНПА 6 и срабатывании датчика определения положения АНПА 28 в корпусе причального устройства 1, движительная система АНПА 6 выключается.
После прохождения половины длины корпуса АНПА 6 в корпус причального устройства 1, аналогично включаются в работу последующие устройства протаскивания 12 обеспечивающие продольное перемещение АНПА 6 вдоль направляющих дорожек 10, вплоть до упора в стопорный рычаг 20, стопорного устройства 18, которое находиться в положение «ЗАКРЫТО», при срабатывании датчика определения положения АНПА 28 в корпусе причального устройства 1.
Поворот стопорного рычага 20 в положение «ЗАКРЫТО» приводится в движение электрическим сервоприводом 19 с сигнализацией датчика положения стопорного рычага 29.
После получения сигнала об упоре носовой оконечностью АНПА 6 в стопорный рычаг 20 от датчика определения положения АНПА 28, система управления причального устройства, расположенная в прочном контейнере с аппаратурой 4, выдает команду устройствам удержания 21 на поджатие АНПА 6 к направляющими дорожками 10. Поджатие производится следующим образом - линейный электропривод 23 (фиг. 5), установленный в прочный корпус 22, передает усилие посредством продольного перемещения своей подвижной части, соединенной с пружинный пакетом 24 и тягой 25 на рычаг 26, который вращательным движением прижимает АНПА 6 к направляющим дорожкам 10 посредством скобы 27. При этом пружинный пакет 24 препятствует превышению допустимой нагрузки на АНПА 6, предаваемой от линейного электропривода 23. Устройство видеовизуализации 30 производит видеофиксацию процессов прохождения АНПА 6 в корпус причального устройства 1.
Выпуск АНПА из причального устройства.
Система управления, расположенная в прочном контейнере с аппаратурой 4, выдает команду на перевод стопорного рычага 20 стопорного устройства 18 в положение «ОТКРЫТО». Перевод стопорного рычага 20 из положения «ЗАКРЫТО» в положение «ОТКРЫТО» производится путем его поворота на 90° электрическим сервоприводом 19 до сигнализации датчика положения стопорного рычага 29. При этом выдается команда на подъем скоб 27 устройств удержания 21. Подъем производится следующим образом - линейный электропривод 23, установленный в прочный корпус 22, передает усилие посредством обратного продольного перемещением своей подвижной части, соединенной с пружинный пакетом 24 и тягой 25 на рычаг 26, который вращательным движением поднимает скобу 27. После чего ролики 16 устройств протаскивания 12 начинают вращаться и обеспечивают продольное перемещение АНПА 6 вдоль направляющих дорожек 10 за пределы причального устройства.
Таким образом, предлагаемое изобретение обеспечит прием/выпуск, хранение, транспортировку и удержание автономного необитаемого подводного аппарата в открытом море, как на морском дне, так и в толще воды. Также причальное устройство обеспечит повышенную точность приведения АНПА к причальному устройству с контролем позиционирования АНПА в причальном устройстве с помощью вспомогательных исполнительных механизмов обеспечивающих активную помощь приема/выпуска и фиксации АНПА. Также изобретение позволит сократить время на операцию приема АНПА в причальное устройство, и на приведение АНПА к причальному устройству, исключив время на повторные заходы АНПА на стыковку с причальным устройством, что повысит количество времени целевого выполнения миссии АНПА относительно времени, отведенного на парковку АНПА, в условиях ограниченной автономности АНПА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРИВЕДЕНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА К ДОННОМУ ПРИЧАЛЬНОМУ УСТРОЙСТВУ | 2020 |
|
RU2750550C1 |
| Система мониторинга технического состояния подводного добычного комплекса | 2021 |
|
RU2774662C1 |
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
| Устройство для подводного пуска и приема автономного необитаемого подводного аппарата с борта судна-носителя | 2020 |
|
RU2748099C1 |
| Система мониторинга подводного добычного комплекса | 2017 |
|
RU2653614C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2018 |
|
RU2714539C1 |
| Устройство для подводного пуска и приема автономного необитаемого подводного аппарата | 2019 |
|
RU2719491C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Устройство для зарядки аккумуляторной батареи автономного необитаемого подводного аппарата | 2017 |
|
RU2669198C1 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |


Изобретение относится к области морской техники и предназначено для обеспечения приема/выпуска, хранения, транспортировки, приема и выпуска автономного необитаемого подводного аппарата в открытом море. Причальное устройство для приема/выпуска, хранения, транспортировки и удержания автономного необитаемого подводного аппарата в открытом море содержит корпус причального устройства, элемент несущей конструкции, гидроакустический маяк, прочный контейнер с аппаратурой, причальный конус, автономный необитаемый подводный аппарат, бесконтактное устройство информационного обмена, бесконтактное устройство зарядки аккумуляторных батарей и привод фиксатора. Корпус причального устройства выполнен в виде рамной проницаемой конструкции с элементом несущей конструкции, с возможностью его демонтажа. Корпус причального устройства снабжен рым-болтами, направляющими дорожками и причальным конусом, который снабжен световыми элементами системы приведения. Также корпус причального устройства снабжен устройствами протаскивания, состоящими из прочных корпусов с электродвигателями, валами, роликами и подпружиненных кронштейнов. Дополнительно корпус причального устройства снабжен стопорным устройством, состоящим из электрического сервопривода и стопорного рычага. На корпусе причального устройства установлены датчики определения положения АНПА и стопорного рычага, а также устройства видеовизуализации. Достигается обеспечение функционирования причального устройства как на морском дне, так и в толще воды, повышение точности приведения АНПА к причальному устройству, контроль позиционирования АНПА в причальном устройстве, реализация активной помощи приема/выпуска АНПА, а также сокращение времени на прием АНПА в причальное устройство и на приведение АНПА к причальному устройству. 5 ил.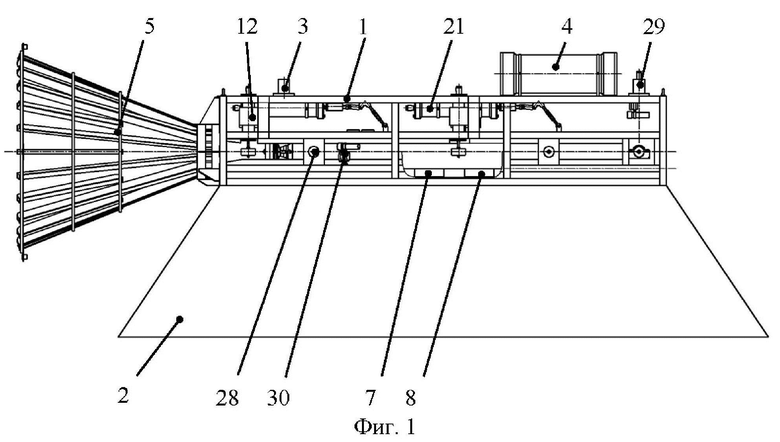
Причальное устройство для приема/выпуска, хранения, транспортировки и удержания автономного необитаемого подводного аппарата в открытом море, содержащее корпус причального устройства, элемент несущей конструкции гидроакустический маяк, прочный контейнер с аппаратурой, причальный конус, автономный необитаемый подводный аппарат, бесконтактное устройство информационного обмена, бесконтактное устройство зарядки аккумуляторных батарей, привод фиксатора автономного необитаемого подводного аппарата, отличающееся тем, что причальное устройство для приема/выпуска, хранения, транспортировки и удержания автономного необитаемого подводного аппарата в открытом море выполнено с возможностью размещения как на дне, так и в толще воды, причем корпус причального устройства выполнен в виде рамной проницаемой конструкции, элемент несущей конструкции выполнен с возможностью демонтажа с корпуса причального устройства, также корпус причального устройства снабжен, по меньшей мере, одним рым-болтом, по меньшей мере, одной направляющей дорожкой, причальным конусом, снабженным, по меньшей мере, одним световым элементом системы приведения, также корпус причального устройства снабжен, по меньшей мере, одним устройством протаскивания, в свою очередь снабженного прочным корпусом с электродвигателем, валом, роликом и подпружиненным кронштейном, для возможности прямолинейного перемещения автономного необитаемого подводного аппарата, стопорным устройством, в свою очередь снабженным электрическим сервоприводом и стопорным рычагом, а привод фиксатора выполнен в виде, по меньшей мере, одного устройства удержания, в свою очередь снабженного прочным корпусом с линейным электродвигателем, пружинным пакетом, тягой, рычагом и скобой, для возможности фиксации автономного необитаемого подводного аппарата в корпусе причального устройства, а также корпус причального устройства снабжен, по меньшей мере, одним датчиком определения положения автономного необитаемого подводного аппарата в корпусе причального устройства, по меньшей мере, одним датчиком положения стопорного рычага, по меньшей мере, одним устройством видеовизуализации для возможности наблюдения за процессом приема/выпуска автономного необитаемого подводного аппарата в/из причального устройства.
| СИСТЕМА ПРИВЕДЕНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА К ДОННОМУ ПРИЧАЛЬНОМУ УСТРОЙСТВУ | 2020 |
|
RU2750550C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2018 |
|
RU2714539C1 |
| US 20110051555 A1, 03.03.2011 | |||
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |

