Изобретение относится к области подводной навигации, а более конкретно - к способам навигационного обеспечения стыковки автономных необитаемых подводных аппаратов (далее - АНПА) с донными станциями.
Известно, что для безаварийной стыковки АНПА с донной станцией необходимо осуществить навигационное обеспечение АНПА, заключающееся в обеспечении точного позиционирования АНПА при приведении его к причальному устройству донной станции. Причем точность выработки навигационных параметров при непосредственной стыковке с объектом должна составлять единицы сантиметров.
Для приведения АНПА к донной станции используется гидроакустическая навигационная система (далее - ГАНС). В известных системах навигации подводного автономного необитаемого аппарата задачи приведения и стыковки под водой решаются при наличии акустического [1-3] или визуального (оптического) контакта в ближней зоне приведения [4, 5]. Все они требуют для использования, по крайней мере, две системы навигации, на больших удалениях - гидроакустическую навигационную систему (с длинной или ультракороткой базой) для ориентации АНПА в пространстве, на малых удалениях - гидроакустический маяк для наведения АНПА на донную станцию. При этом, может потребоваться и система стыковки аппарата, т.к. при стыковке погрешность определения местоположения АНПА относительно причального устройства не должна превышать 10 сантиметров. Погрешности существующих гидроакустических навигационных систем составляют от нескольких единиц, до нескольких десятков метров, в зависимости от модели и типа устройства. Поэтому эти способы необходимо комбинировать с применением гидроакустических маяков, что повышает общее количество элементов системы, а равно увеличивает стоимость ее эксплуатации.
В случае приведения АНПА каким-либо образом в ближнюю область нахождения донной станции (на дальность действия гидроакустического маяка), известен способ приведения АНПА на гидроакустический маяк [6]. Недостатком этого способа является то, что АНПА после получения сигнала от гидроакустического маяка, идет по наикротчайшему расстоянию. В случае расположения естественных или искусственных препятствий на пути следования АНПА, наведение на гидроакустический маяк будет невозможно.
Также задача навигации подводных аппаратов решается в других работах, например в [7, 8]. В них уменьшение погрешности (или повышение разрешающей способности систем) предлагается производить за счет увеличения энергии излучаемых импульсов, либо использования сложных сигналов.
Наиболее близким способом приведения АНПА к донной станции является активное формирование диаграммы направленности, которое достигается использованием многоэлементных фазируемых антенных решеток и применяется, например, в системе «НГРАР-500» компании Kongsberg. Но данная система, как и остальные современные гидроакустические навигационные системы, работают на фиксированной частоте. А значит имеют одинаковую погрешность выработки навигационных параметров на всей дальности действия, чрезмерную на близких дистанциях от донной станции. При этом, в системе «HIPAP-500» используются сложные алгоритмы для определения азимута и угла места по направлению к АНПА, погрешность определения которых растет с увеличением расстояния между АНПА и донной станцией. Требуемую точность выработки навигационных параметров возможно обеспечить, при излучении акустического сигнала гидроакустической антенны ГАНС на высокой частоте. Однако, при повышении частоты излучения, сокращается дальность действия ГАНС. Для приведения АНПА к донной станции с расстояния в 1 км необходимо, чтобы ГАНС излучала акустические волны на частоте, в 10 раз меньшей, чем требуется для обеспечения требуемой точности позиционирования при стыковке АНПА с донной станцией.
Таким образом, возникает противоречие между необходимостью безопасного приведения АНПА к донной станции с рабочей дальности действия ГАНС за счет вывода на безопасную глубину АНПА и удержания на ней, и обеспечения требуемой точности позиционирования АНПА при навигационном обеспечении его стыковки с донной станцией.
Задачей, на решение которой направлено изобретение, является устранение данного противоречия, а именно, обеспечение требуемой точности позиционирования АНПА при навигационном обеспечении его стыковки с донной станцией и удержания АНПА на безопасной глубине с рабочей дальности действия ГАНС.
Указанный технический результат достигается тем, что в известном способ навигационного обеспечения автономных необитаемых подводных аппаратов при их стыковке с донной станцией с использованием гидроакустической навигационной системы с активным формированием диаграммы направленности, дополнительно для навигационного обеспечения приведения автономного необитаемого подводного аппарата к донной станции и его стыковки с приемным устройством донной станции используется одна и та же гидроакустическая навигационная система, формирующая лепестковую диаграмму направленности с изменяемой, в зависимости от дальности до автономного необитаемого подводного аппарата, частотой излучения гидроакустических сигналов.
Сущность изобретения поясняется чертежами на фигурах 1, 2, где:
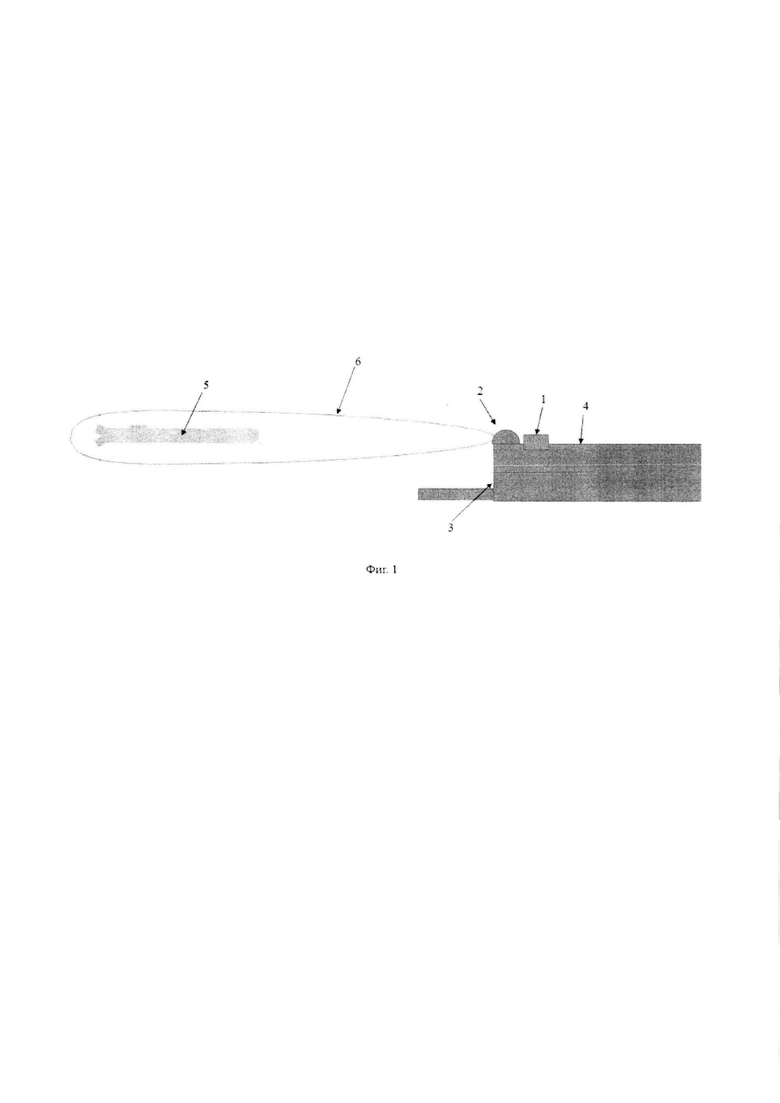
- на фиг. 1 изображен общий вид гидроакустической навигационной системы с активным формированием диаграммы направленности;
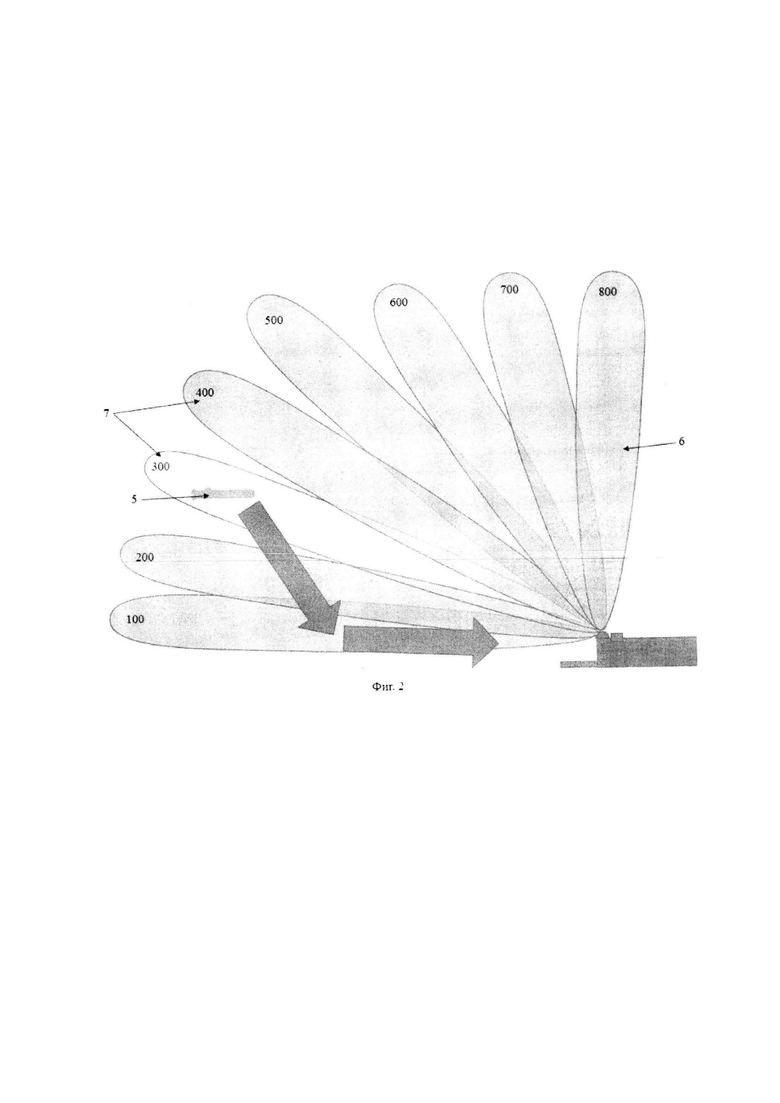
- на фиг. 2 изображены лепестковые диаграммы направленности с изменяемые, в зависимости от дальности до автономного необитаемого подводного аппарата.
На фиг. 1 показана гидроакустическая навигационная система с активным формированием диаграммы направленности, состоящая из блока управления 1 и гидроакустической антенны особой конструкции 2. Антенна 2 устанавливается таким образом, чтобы находиться над причальным устройством 3 донной станции 4. Антенна 2 состоит из сегментов. Каждый сегмент, при излучении гидроакустических волн, формирует лепестковую диаграмму направленности, а при излучении гидроакустического сигнала, передает время излучения сигнала и номер сегмента (лепестка) 6. Кодовый номер лепестка назначается в зависимости от азимута и угла места сегмента антенны. Приемная гидроакустическая станция, расположенная на АНПА 5 принимает сигнал.
На фиг. 2 изображены лепестковые диаграммы направленности, изменяемые в зависимости от дальности до автономного необитаемого подводного аппарата, поясняющие процесс реализации способа. На фигуре лепестки 7-14 отражают сегменты (лепесток диаграммы направленности) антенны, каждый из которых может находиться непосредственно над причальным устройством донной станции, иметь наименьшее кодовое значение.
Пример реализации способа
АНПА 5, входя в зону действия гидроакустической навигационной системы, получает кодовое значение номера лепестка 7 и время излучения сигнала. По разности времени излучения и времени приема сигнала вычисляется расстояние до донной станции, а по номеру лепестка, положение АНПА относительно донной станции. Сегмент (лепесток диаграммы направленности) антенны, находящийся непосредственно над причальным устройством донной станции, имеет наименьшее кодовое значение. Таким образом, по несложному алгоритму АНПА перемещается в направлении донной станции и маневрирует по направлению движения и глубине для захода АНПА в лепесток диаграммы направленности с наименьшим кодовым значением. После занятия АНПА местоположения в сегменте с наименьшем кодовым значением, АНПА движется на сближение с причальным устройством. При сокращении дистанции между АНПА и причальным устройством до 50 метров, гидроакустическая навигационная система переводится в высокочастотный режим. Как известно, чем больше частота излучения гидроакустического сигнала гидроакустической навигационной станции, тем меньше погрешность определения местоположения подводных объектов, но при этом и существенно снижается дальность действия станции. На расстоянии до АНПА менее 50 м, переход ГАНС на высокочастотный режим обеспечит необходимую точность позиционирования, составляющую единицы сантиметров.
Техническим результатом изобретения является формирование ГАНС лепестковой диаграммы направленности для точного определения местоположения АНПА относительно донной станции, и выработка навигационных параметров гидроакустической навигационной системой на большом растоянии, - для приведения автономного необитаемого подводного аппарата к донной станции, и выработка навигационных параметров этой же гидроакустической навигационной системой с требуемой точностью позиционирования, - для обеспечения стыковки автономного необитаемого подводного аппарата с приемным устройством донной станции, посредством увеличения частоты излучения акустических сигналов гидроакустической навигационной системы, установленной на донной станции, после сокращения дистанции между автономным необитаемым подводным аппаратом и донной станцией на определенное значение (менее 50 м).
Новые признаки в предложенном способе заключаются в использовании впервые гидроакустической навигационной системы с изменяемой частотой излучения для одновременного действия на большом расстоянии с малой точностью, и на малом расстоянии - с большой точностью позиционирования АНПА (для стыковки к донной станции), а также алгоритм использования направленных лепестков диаграммы направленности с уникальными номерами, в соответствии с которыми АНПА определяет свое местоположение относительно донной станции.
Изобретательский уровень
Заявляемый способ был проанализирован на соответствие критерию «изобретательский уровень». Для этого были исследованы близкие признаки известных решений как в данной, так и в смежных областях техники. В рассмотренных работах [1-8] предлагается либо использовать наведение на гидроакустический маяк без приведения АНПА на необходимую глубину и необходимой точности позиционирования АНПА [6], комбинировать несколько способов приведения АНПА к донной станции [1-5], либо увеличивать мощность излучаемого сигнала [7, 8]. Предложенный способ явно не вытекает из известных решений как в данной, так и в смежных областях техники, не создан путем объединения, изменения или совместного использования сведений, содержащихся в уровне техники.
Таким образом, по мнению заявителя и авторов, предлагаемое техническое решение способа навигационного обеспечения автономных необитаемых подводных аппаратов в своей неразрывной совокупности признаков является новым, явным образом не следует из уровня техники и позволяет получить важный технический результат - действия на большом расстоянии с малой точностью, и на малом расстоянии - с большой точностью позиционирования АНПА (для стыковки к донной станции) и промышленно применимо.
Источники информации
1. Allen В., Austin Т., Forrester N. et al. Autonomous Docking Demonstrations with Enhanced REMUS Technology // Proc. of OCEANS'06 MTS/IEEE. Boston, MA, 18-21 September, 2006. USA CD-ROM. ISBN 1-4244-0115-1.
2. Utley С, Lee H. Signal Processing Algorithms for High-Precision Three-Dimensional Navigation and Guidance of Unmanned Undersea Vehicles (UUV) // Proc. of OCEANS'06 MTS/IEEE. Boston, MA, 18-21 September, 2006. USA CD-ROM. ISBN 1-4244-0115-1.
3. Grant M. de Goede, Donald Norris. Recovering Unmanned Undersea Vehicles With a Homing and Docking Sonar // Proc. of OCEANS 2005 MTS/IEEE. Washington, D.C., USA, 18-23 September 2005. USA CD-ROM. ISBN 0-933957-33-5.
4. Inzartsev A.V., Matvienko Yu.V., Pavin A.M., Vaulin Yu.V., Scherbatyuk A.Ph. Algorithms of Autonomous Docking System Operation for Long Term AUV // Proc. of 14th Int. Symp. on Unmanned Untethered Submersible Technology (UUST05), Durham, New Hampshire, USA, August 21-24, 2005.
5. Ваулин Ю.В., Инзарцев A.B., Матвиенко A.B., Павин A.M., Щербатюк А.Ф. Исследование работы элементов системы приведения автономного необитаемого подводного аппарата // Матер, междунар. науч.-техн. конф. «Технические проблемы освоения мирового океана». Владивосток, 14-17 сентября, 2005. Владивосток: Дальнаука, 2005, с. 40-45
6. A.M. Павин. Автоматическое приведение автономного подводного робота к гидроакустическому маяку // Подводные исследования и роботехника. 2008, №5 (1), с. 32-38.
7. Патент РФ №2460043
8. Патент РФ №2456634
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРИВЕДЕНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА К ДОННОМУ ПРИЧАЛЬНОМУ УСТРОЙСТВУ | 2020 |
|
RU2750550C1 |
| Гидроакустический комплекс позиционирования и связи для навигационно-информационного обеспечения автономных необитаемых подводных аппаратов | 2023 |
|
RU2812089C1 |
| Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата | 2018 |
|
RU2689281C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2790529C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата, выполняющего мониторинг подводного добычного комплекса | 2021 |
|
RU2756668C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| СПОСОБ ВЫСОКОТОЧНОГО КООРДИНИРОВАНИЯ ПОДВОДНОГО КОМПЛЕКСА В УСЛОВИЯХ ПОДЛЕДНОГО ПЛАВАНИЯ | 2013 |
|
RU2555479C2 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
Изобретение относится к области подводной навигации, а более конкретно к способам навигационного обеспечения стыковки автономных необитаемых подводных аппаратов (далее АНПА) с донными станциями. Предлагается способ навигационного обеспечения автономных необитаемых подводных аппаратов при их стыковке с донной станцией с использованием гидроакустической навигационной системы с активным формированием диаграммы направленности, отличающийся тем, что для навигационного обеспечения приведения автономного необитаемого подводного аппарата к донной станции и его стыковки с приемным устройством донной станции используется одна и та же гидроакустическая навигационная система, формирующая лепестковую диаграмму направленности с изменяемой, в зависимости от дальности до автономного необитаемого подводного аппарата, частотой излучения гидроакустических сигналов. Техническим результатом изобретения является формирование ГАНС лепестковой диаграммы направленности для точного определения местоположения АНПА относительно донной станции и выработка навигационных параметров гидроакустической навигационной системой на большом расстоянии, для приведения автономного необитаемого подводного аппарата к донной станции, и выработка навигационных параметров этой же гидроакустической навигационной системой с требуемой точностью позиционирования, для обеспечения стыковки автономного необитаемого подводного аппарата с приемным устройством донной станции, посредством увеличения частоты излучения акустических сигналов гидроакустической навигационной системы, установленной на донной станции, после сокращения дистанции между автономным необитаемым подводным аппаратом и донной станцией на определенное значение (менее 50 м). 2 ил.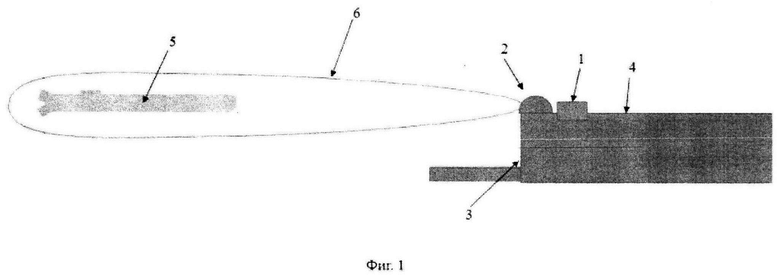
Способ навигационного обеспечения автономных необитаемых подводных аппаратов при их стыковке с донной станцией с использованием гидроакустической навигационной системы с активным формированием диаграммы направленности, отличающийся тем, что для навигационного обеспечения приведения автономного необитаемого подводного аппарата к донной станции и его стыковки с приемным устройством донной станции используется одна и та же гидроакустическая навигационная система, формирующая лепестковую диаграмму направленности с изменяемой, в зависимости от дальности до автономного необитаемого подводного аппарата, частотой излучения гидроакустических сигналов, при сокращении расстояния между автономным необитаемым подводным аппаратом и донной станцией на определенное значение (менее 50 м) увеличивается частота излучения акустических сигналов гидроакустической навигационной системы, установленной на донной станции.
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА | 2012 |
|
RU2501038C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| АРКТИЧЕСКАЯ ПОДВОДНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ И НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ НАДВОДНЫХ И ПОДВОДНЫХ ОБЪЕКТОВ НАВИГАЦИИ В СТЕСНЕННЫХ УСЛОВИЯХ ПЛАВАНИЯ | 2015 |
|
RU2596244C1 |
| US 6625083 B2, 23.09.2003. | |||

