ОБЛАСТЬ ТЕХНИКИ
Заявленное к системам управления приводами, специально предназначенным для автономных дорожных транспортных средств, а именно к универсальному блоку управления автономного транспортного средства.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Из уровня техники известны подобные устройства, в частности многофункциональный мобильный модуль для автоматического управления транспортным средством (см. RU2794386, опубл. 17.04.2023). Модуль содержит раму. Рама выполнена из металлического профиля. Модуль содержит: камеры, лидар, инерциальную навигационную систему, вычислители системы автоматического управления транспортным средством, сетевые коммутаторы, аппаратный синхронизатор времени, GSM антенны, наружную обшивку и рамку с контуром уплотнения по периметру, приемник спутниковой навигационной системы, циркуляционные вентиляторы, нагреватели, колодки питания и два DC-DC преобразователя, стеклоочистители, дневные ходовые огни, бачок для стеклоомывающей жидкости, контроллер управления периферией, приточные и вытяжные вентиляторы, стробоскопы. Наружная обшивка модуля представляет собой капот, содержащий замки и газлифты для фиксации в открытом положении. Во фронтальную деталь обшивки вклеено лобовое стекло модуля, пропускающее лазерное излучение лидара. По периметру боковых деталей обшивки установлены уплотнители, обеспечивающие герметизацию модуля при монтаже. Обшивка в сборе образует замкнутый, герметичный объем, который обслуживается системой обеспечения теплового режима. Обшивка выполнена из радиопрозрачного композитного материала. На нижней детали обшивки находятся присоединительные площадки для крепления модуля к транспортному средству
Также из уровня техники известен электронный блок управления OpenECU™ M560 (https://openecu.com/product/m560/) с технологией функциональной безопасности для блока управления транспортным средством (VCU) и блока управления зарядом автомобиля (VCCU) для поддержки самых требовательных приложений диспетчерского управления электромобилями (EV) / гибридными электромобилями (HEV). M560 был разработан в качестве элемента безопасности вне контекста (SEooC) в соответствии со стандартом ISO 26262. ЭБУ M560 поддерживается высокопроизводительным первичным микропроцессором SPC5746 и мощным 32-разрядным вторичным микропроцессором SPC560P34, обеспечивающим сложную проверку рациональности с высокой пропускной способностью и мониторинг безопасности системы для полновластных приложений управления транспортными средствами. M560 предназначен для поддержки приложений диспетчерского управления EV / HEV, встроенная схема зарядки устраняет необходимость в отдельном интерфейсном модуле зарядного устройства. Благодаря большому количеству настраиваемых входов/выходов, усовершенствованному микропроцессору, архитектуре, ориентированной на безопасность и удобному интерфейсу приложений OpenECU Simulink, M560 является отличной платформой для создания прототипов с быстрым управлением для широкого спектра приложений. Dana также предлагает алгоритм управления для модели электромобиля в MATLAB и комбинированной системе зарядки (CCS), подходящий для поддержки большинства архитектур EV / HEV / NEV и соответствующий стандартам SAE J1772 и DIN 70121. С помощью алгоритмов диспетчерского управления и комбинированной системы зарядки (CCS) M560 или M580 получают интегрированный модуль с блоком управления автомобилем (VCU) и блоком управления зарядом (CMU) в одном модуле, т.е. два ЭБУ в одном контроллере.
Предложенный аналог не обладает достаточным быстродействием, поскольку минимальное время обработки данных 400 мкс.
Наиболее близким аналогом заявленного устройства может быть выбран автопилот X7/X7 Pro  , в котором используется более производительный процессор серии STM32H7, чем полетный контроллер предыдущего поколения PX4 (FMUv5), и интегрированы высокоточные датчики промышленного класса и датчики дрейфа сверхнизких температур и полетный контроллер. Автопилот X7 и X7 Pro имеет модульную конструкцию, которую можно настроить в зависимости от структуры дрона, и полностью совместим с интерфейсом автопилота V5 + Core. X7 Pro заменяет чип ICM-20689 на X7 на высокопроизводительный чип ADI16470. Автопилоты серии CUAV поддерживают коммуникационные каналы LTE Link облачной платформы Lei Xun. Они общаются через сети 4G и 5G, поддерживают передачу и обмен видео высокой четкости в режиме реального времени, а также поддерживают функции распределения разрешений и управления командами дронов.
, в котором используется более производительный процессор серии STM32H7, чем полетный контроллер предыдущего поколения PX4 (FMUv5), и интегрированы высокоточные датчики промышленного класса и датчики дрейфа сверхнизких температур и полетный контроллер. Автопилот X7 и X7 Pro имеет модульную конструкцию, которую можно настроить в зависимости от структуры дрона, и полностью совместим с интерфейсом автопилота V5 + Core. X7 Pro заменяет чип ICM-20689 на X7 на высокопроизводительный чип ADI16470. Автопилоты серии CUAV поддерживают коммуникационные каналы LTE Link облачной платформы Lei Xun. Они общаются через сети 4G и 5G, поддерживают передачу и обмен видео высокой четкости в режиме реального времени, а также поддерживают функции распределения разрешений и управления командами дронов.
Наиболее близкий аналог снабжен средствами близкими по функциям с заявленным устройством, однако не может служить средством того же назначения, поскольку его корпус не совсем подходит для автомобильного применения, а также поскольку содержит хрупкие разъёмы. Ближайший аналог предназначен в основном для управления БПЛА.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Техническим результатом изобретения является повышение надежности и быстродействия работы устройства для обеспечения управляемости и безопасности транспорта.
Технический результат достигается посредством универсального блока управления автономного транспортного средства, содержащего блок соединения с компьютером или коммутатором при помощи Ethernet, блок соединения с транспортным средством при помощи шин CAN и RS485, аналоговые входы, дискретные входы и выходы, входы соединения с системой зажигания и с системой неотключаемого и общего питания, цифровой аналоговый преобразователь.
Заявленный блок управления характеризуется тем, что аналоговые входы предназначены для присоединения к внешним средствам управления транспортного средства, выбранным из группы: датчики аналоговые, педали, джойстики аналоговые; аналоговые выходы предназначены для имитации работы датчиков и подключаются к блокам управления внутри транспортного средства, дискретные входы предназначены для присоединения к средствам, выбранным из группы: датчики цифровые, кнопки, концевые выключатели, к дискретным выходам присоединяются средства, выбранные из группы: реле, средства индикации, светодиодные приборы освещения, при этом входы и выходы могут использоваться для любого из средств выбранной группы посредством применения настроек программного обеспечения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сущность изобретения поясняется чертежами, на которых:
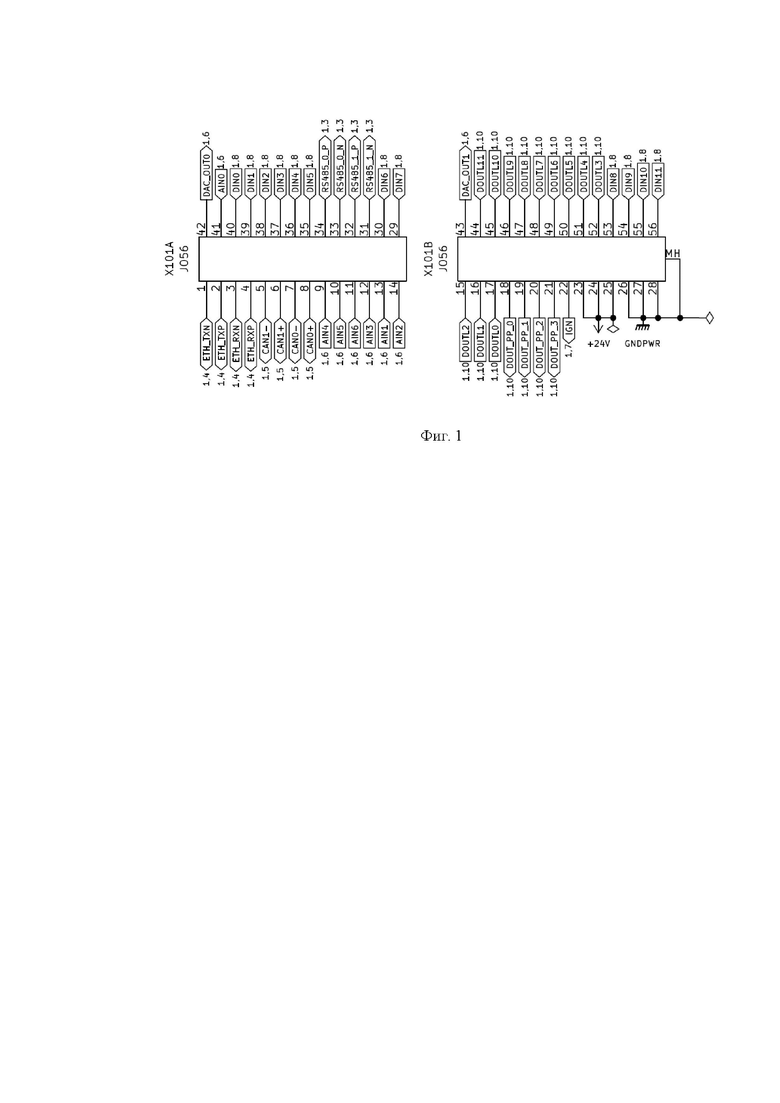
Фиг.1 – схема универсального блока управления автономного транспортного средства.
На фиг.1 позиции означают следующее.
1 – Линия Ethernet, TX+
2 – Линия Ethernet, TX-
3 – Линия Ethernet, RX+
4 – Линия Ethernet, RX-
5 – Шина CAN1, CAN_L
6 – Шина CAN1, CAN_H
7 – Шина CAN0, CAN_L
8 – Шина CAN0, CAN_H
9 – Аналоговый вход, линия АЦП IN9
10 – Аналоговый вход, линия АЦП IN10
11 – Аналоговый вход, линия АЦП IN12
12 – Аналоговый вход, линия АЦП IN8
13 – Аналоговый вход, линия АЦП IN3
14 – Аналоговый вход, линия АЦП IN6
15 – Дискретный выход, Линия PE10
16 – Дискретный выход, Линия PE9
17 – Дискретный выход, Линия PE8
18 – Дискретный выход, Линия TIM4_CH1
19 – Дискретный выход, Линия TIM4_CH2
20 – Дискретный выход, Линия TIM4_CH3
21 – Дискретный выход, Линия TIM4_CH4
22 – Вход зажигания
23 – Вход неотключаемого питания Vin
24 – Вход неотключаемого питания Vin
25 – Вход неотключаемого питания Vin
26 – Общий вход питания
27 – Общий вход питания
28 – Общий вход питания
29 – Дискретный вход, Линия PD7
30 – Дискретный вход, Линия PE6
31 – Шина RS485, Линия A, USART6
32 – Шина RS485, Линия B, USART6
33 – Шина RS485, Линия A, USART1
34 – Шина RS485, Линия B, USART1
35 – Дискретный вход, Линия PE5
36 – Дискретный вход, Линия PD4
37 – Дискретный вход, Линия PD3
38 – Дискретный вход, Линия PD2
39 – Дискретный вход, Линия PE12
40 – Дискретный вход, Линия PE11
41 – Аналоговый вход, линия АЦП IN0
42 – Выход ЦАП, Линия 1
43 – Выход ЦАП, Линия 2
44 – Дискретный выход, SPI управление
45 – Дискретный выход, SPI управление
46 – Дискретный выход, SPI управление
47 – Дискретный выход, SPI управление
48 – Дискретный выход, Линия PA8
49 – Дискретный выход, Линия PE14
50 – Дискретный выход, Линия PE13
51 – Дискретный выход, Линия PD1
52 – Дискретный выход, Линия PD0
53 – Дискретный вход, SPI управление
54 – Дискретный вход, SPI управление
55 – Дискретный вход, SPI управление
56 – Дискретный вход, SPI управление
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Универсальный блок управления автономного транспортного средства в частном варианте исполнения выполнен следующим образом. Блок имеет 7 аналоговых входов, 12 дискретных входов, 2 аналоговых выхода, 12 дискретных выходов (открытый коллектор), 4 дискретных полумостовых выходов, интерфейс Ethernet 100 Mb/s, 2 шины CAN и две шины RS485. Применяемые микропроцессоры CPU- STM32F407VE; Flash, 512 kB; RAM, 192 kB ; и Clock, 168 MHz. Напряжение питания от +10В до +30В, напряжение входа зажигания от +5В до +30В. Количество входов wakeup - 3. Потребляемый ток в режиме сна <5 mA. Рекомендуемый предохранитель в цепи питания (без учета полумостовых выходов) 3А. Корпус универсального блока преимущественно алюминиевый.
Элементы универсального блока управления выполняют следующие функции. Блок соединения передают информацию на компьютер или коммутатором при помощи Ethernet, блок соединения с транспортным средством осуществляет передачу информации при помощи шин CAN и RS485. Управление устройством обеспечивает цифровой аналоговый преобразователь. Входы соединения с системой зажигания и с системой неотключаемого и общего питания соединены соответственно с указанными системами. Аналоговые входы передают информацию внешним средствам управления транспортного средства, таким как: датчики аналоговые, педали, джойстики аналоговые. Аналоговые выходы предназначены для имитации работы датчиков и подключаются к блокам управления внутри транспортного средства. Дискретные входы передают информацию к таким средствам, как датчики цифровые, кнопки, концевые выключатели. Дискретные выходы передают информацию таким средствам, как реле, средства индикации, светодиодные приборы освещения. При этом указанные входы и выходы могут использоваться для любого из средств выбранной группы посредством применения настроек программного обеспечения.
При правильной конфигурации программного обеспечения достигается быстродействие менее 1 мкс, что существенно превышает быстродействие аналогов, которое составлет 400 мкс.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК ИНТЕРФЕЙСНЫЙ | 2007 |
|
RU2363980C2 |
| Промышленный контроллер | 2017 |
|
RU2642400C1 |
| БЛОК АВТОВЕДЕНИЯ АВ-САУТ | 2024 |
|
RU2834103C1 |
| Беспроводной контроллер датчиков | 2018 |
|
RU2701103C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ЭЛЕКТРОПОЕЗДА | 2018 |
|
RU2733594C2 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2716964C1 |
| УСТРОЙСТВО КОНТРОЛЯ И РЕГИСТРАЦИИ РАСХОДА ТОПЛИВА НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2012 |
|
RU2505861C1 |
| Бортовой аппаратно-программный комплекс системы определения веса груза и нагрузки на ось грузовых транспортных средств | 2018 |
|
RU2694449C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ МОТОРВАГОННОГО ПОДВИЖНОГО СОСТАВА | 2022 |
|
RU2790985C1 |
Изобретение относится к системам управления приводами, специально предназначенным для автономных дорожных транспортных средств. Универсальный блок управления автономного транспортного средства содержит блок соединения с компьютером или коммутатором при помощи Ethernet, блок соединения с транспортным средством при помощи шин CAN и RS485, аналоговые входы, дискретные входы и выходы, входы соединения с системой зажигания и с системой неотключаемого и общего питания и цифровой аналоговый преобразователь. Аналоговые входы предназначены для присоединения к внешним средствам управления транспортного средства, выбранным из группы: датчики аналоговые, педали, джойстики аналоговые. Аналоговые выходы предназначены для имитации работы датчиков и подключаются к блокам управления внутри транспортного средства. Дискретные входы предназначены для присоединения к средствам, выбранным из группы: датчики цифровые, кнопки, концевые выключатели. К дискретным выходам присоединяются средства, выбранные из группы: реле, средства индикации, светодиодные приборы освещения. Достигается повышение надежности и быстродействия работы устройства для обеспечения управляемости и безопасности транспорта. 1 ил.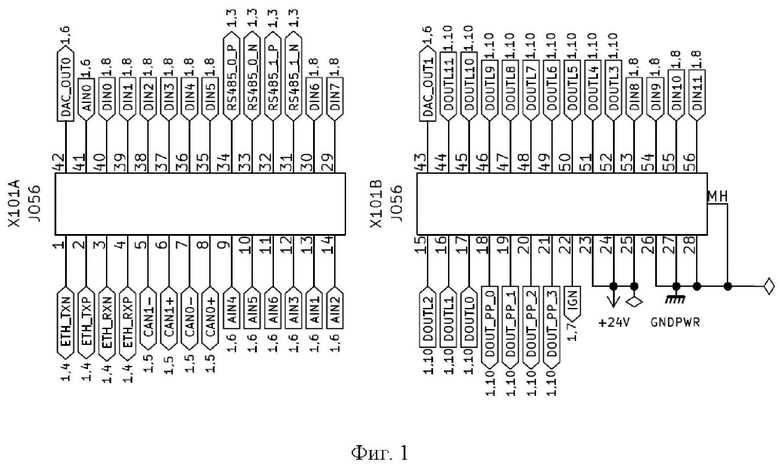
Универсальный блок управления автономного транспортного средства, содержащий блок соединения с компьютером или коммутатором при помощи Ethernet, блок соединения с транспортным средством при помощи шин CAN и RS485 аналоговые входы, дискретные входы и выходы, входы соединения с системой зажигания и с системой неотключаемого и общего питания, цифровой аналоговый преобразователь, отличающийся тем, что аналоговые входы предназначены для присоединения к внешним средствам управления транспортного средства, выбранным из группы: датчики аналоговые, педали, джойстики аналоговые; аналоговые выходы предназначены для имитации работы датчиков и подключаются к блокам управления внутри транспортного средства, дискретные входы предназначены для присоединения к средствам, выбранным из группы: датчики цифровые, кнопки, концевые выключатели, к дискретным выходам присоединяются средства, выбранные из группы: реле, средства индикации, светодиодные приборы освещения, при этом входы и выходы могут использоваться для любого из средств выбранной группы посредством применения настроек программного обеспечения.
| 0 |
|
SU204388A1 | |
| БЛОК УПРАВЛЕНИЯ И СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ СРЕДСТВ БЕЗОПАСНОСТИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2499697C2 |
| US 2018116102 A1, 03.05.2018 | |||
| ЭЛЕКТРИЧЕСКИЙ СОЕДИНИТЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ С БЛОКОМ УПРАВЛЕНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 1997 |
|
RU2194634C2 |
| Статья "Аналоговый ввод/вывод ПЛК", размещенная в сети интернет по адресу https://web.archive.org/web/20221208100908/https://controlengrussia.com/apparatnye-sredstva/analogovyj-vvod-vyvod-plc/, размещенная согласно данным с сайта | |||

