Изобретение относится к области электротехники, а именно к устройствам определения параметров электрических машин, и может найти применение при создании установок для идентификации параметров, например, моментных двигателей постоянно тока.
Известна установка для исследований режимов работы электродвигателей переменного тока (Полезная модель РФ №133321, опубликовано 10.10.2013,бюл. №28), в которой нагрузочный момент для двигателя переменного тока создается высокомоментным двигателем постоянного тока с возбуждением от постоянных магнитов, для этого валы двух двигателей соединены муфтой. Для изменения нагрузки на валу двигателя переменного тока к якорю двигателя постоянного тока подключен электронный блок нагрузки и датчик напряжения.
Недостатком установки является наличие двух двигателей в системе создания момента нагрузки, что не позволяет отдельно испытывать один двигатель.
Известен также учебно-лабораторный стенд для изучения электрических машин и электроприводов (Патент РФ №2473921, опубликовано 27.01.2013, бюл. №3), в котором нагрузочный момент для двигателя переменного тока создается двигателем постоянного тока и наоборот - нагрузочный момент для двигателя постоянного тока создается двигателем переменного тока. При этом выходные валы двигателей соединены между собой через промежуточные мотор-редукторы и муфту.
Однако недостатком стенда является наличие двух двигателей в системе создания момента нагрузки, что не позволяет отдельно испытывать один двигатель.
Известен стенд, принятый за прототип, для изучения средств автоматизации испытаний электрических мотор-редукторов (Патент РФ №2334967, опубликовано 27.09.2008, бюл. №27). Управляемое тормозное устройство содержит тормозной барабан, с которым жестко связан вал исследуемого двигателя. Тормозной барабан размещен с небольшим зазором между фрикционными неподвижной и подвижной колодками. К неподвижной колодке подвижно, например, с помощью шарнира, крепится котировочный винт, резьба которого находится в зацеплении с резьбой отверстия в одном из плеч П-образной крепежной скобы. Подвижная колодка жестко закреплена на штоке, например, с помощью гайки с шайбой, который проходит через отверстие во втором плече П-образной крепежной скобы. Другой конец штока взаимосвязан с тяговым барабаном посредством гибкой тяги. Тяговый барабан размещен на валу электропривода, закрепленного на втором плече П-образной крепежной скобы, который создает регулируемое усилие путем перемещения подвижной колодки. На штоке между подвижной колодкой и плечом П-образной крепежной скобы находится цилиндрическая пружина, обеспечивающая возврат подвижной колодки в исходное положение. Электропривод тягового барабана подключен к управляющей ЭВМ через интерфейсный блок.
Недостатком данного фрикционного модуля создания момента нагрузки является сложность и громоздкость конструкции в применении для исследования маломощных двигателей постоянного тока.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в упрощении конструкции фрикционного модуля для создания момента нагрузки на валу двигателя.
Технический результат достигается тем, что в устройстве создания нагрузочного момента двигателя постоянного тока, содержащем собственно двигатель, статор которого закреплен в корпусе, а ротор кинематически с помощью дополнительного вала соединен с ротором измерителя частоты вращения, закрепленного также на корпусе, регулируемый источник постоянного напряжения, подключенный на вход ротора двигателя, измерители напряжения и тока двигателя, а также функциональный узел создания нагрузочного регулируемого момента относительно оси вращения в виде фрикционного модуля, новым является то, что фрикционный модуль, с которым жестко связан маятниковый груз, представляет собой струбцину с внутренней цилиндрической поверхностью, охватывающей дополнительный вал, сила сжатия которой регулируется перемещением винта, а фрикционный момент нагрузки, создаваемый при вращении дополнительного вала, определяется по формуле

где 



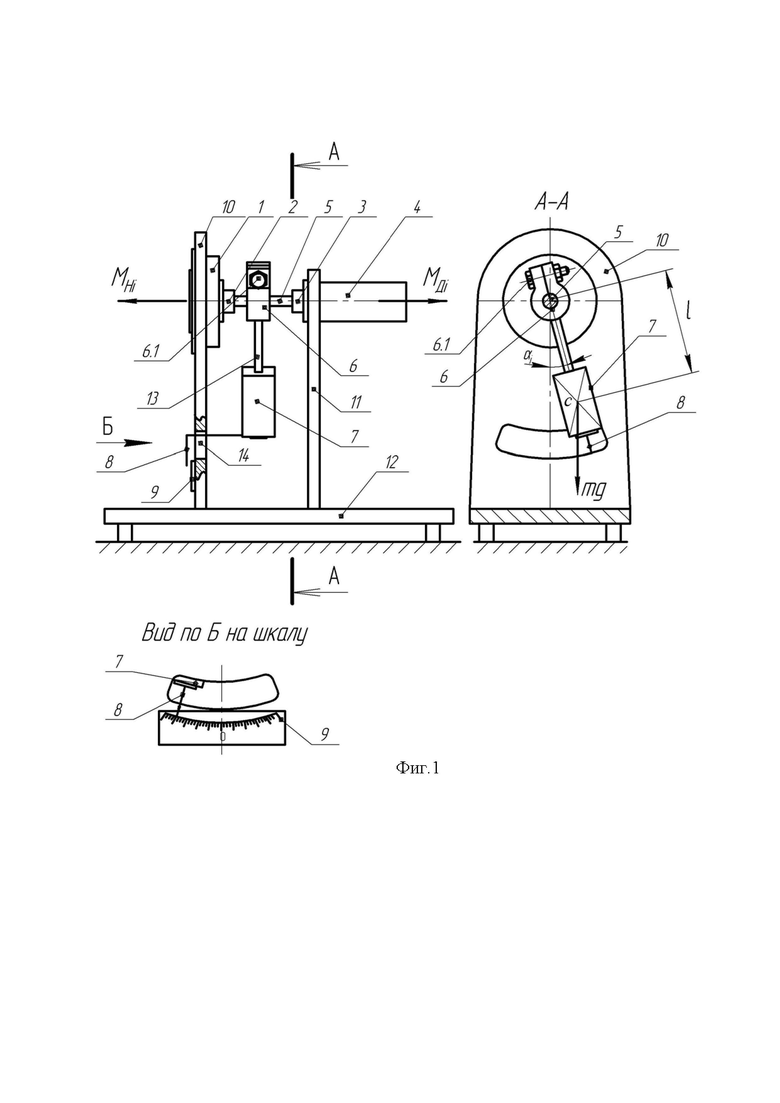
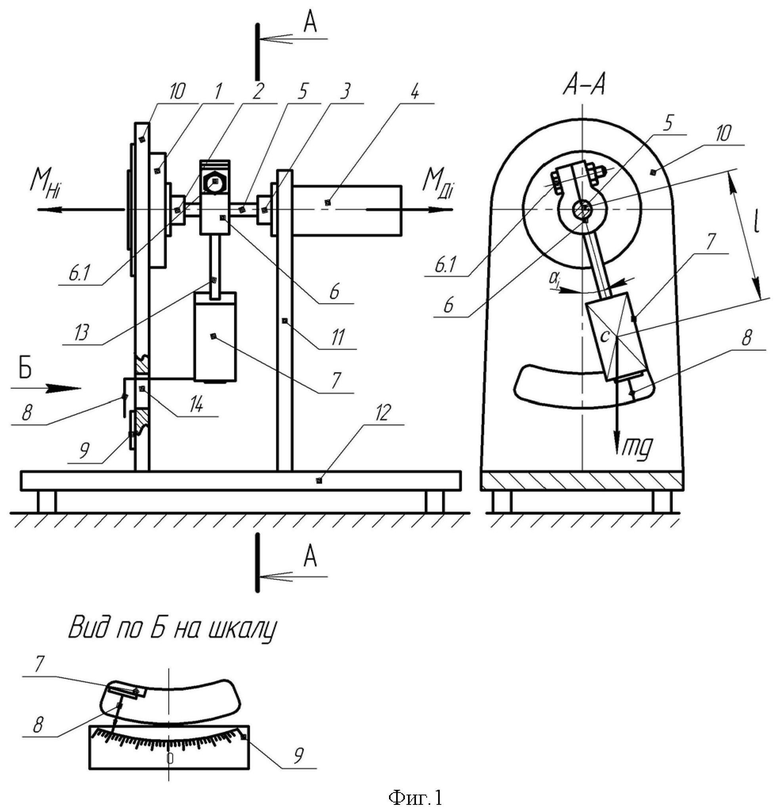
Сущность изобретения поясняется чертежом, приведенным на фиг.1, на которой представлена кинематическая схема устройства.
На фиг.1 приняты следующие обозначения:
1 – двигатель постоянного тока;
2 – первая соединительная муфта;
3 – вторая соединительная муфта;
4 – измеритель частоты вращения (тахогенератор);
5 – дополнительный фрикционный вал;
6 – фрикционный модуль;
6.1 – винт;
7 – эталонный груз;
8 – стрелка;
9 – шкала;
10 – стойка левая;
11 – стойка правая;
12 – основание (корпус);
13 – штанга;
14 – окно.
Буквенные обозначения:







Описание устройства.
Исследуемый двигатель постоянного тока 1крепится к левой стойке 10, измеритель частоты вращения 4 крепится к правой стойке 11. Обе стойки выставляются по оси вращения двигателя и крепятся к основанию 12. Для кинематического (жесткого) соединения между собой валов двигателя 1 и измерителя частоты вращения 4 служат первая 2 и вторая 3 соединительные муфты, которые соединяют фрикционный вал 5, соответственно с ротором двигателя и ротором тахогенератора 4. Для создания момента нагрузки на валу двигателя 1и, соответственно, на фрикционном валу служит фрикционный модуль 6, который представляет собой струбцину с внутренней цилиндрической поверхностью, охватывающей фрикционный вал. При этом сила сухого трения, возникающая между струбциной и фрикционным валом, регулируется перемещением винта 6.1. С фрикционным модулем с помощью штанги 13 соединен эталонный груз 7, расстояние 
Работа устройства при испытаниях двигателя.
Устройство предназначено для создания момента нагрузки 







определяем маятниковость эталонного груза
по которой при заданном значении 
Чтобы пользоваться одной шкалой 9 для различных двигателей при заданном 
При подаче на ротор двигателя напряжения 

где 

Если струбцина 6 не зажата винтом 6.1, то момент сил сухого трения на фрикционном валу практически равен нулю (эталонный груз 7 не отклоняется от вертикали 

Если струбцина 6 зажата винтом 6.1 так, что момент сил сухого трения на фрикционном валу больше пускового момента двигателя (эталонный груз 7 отклоняется от вертикали на максимальный угол 
Если струбцина 6 зажата винтом 6.1 так, что ротор двигателя (и соответственно фрикционного вала) вращаются и эталонный груз отклонен от вертикали на угол 

а данный режим соответствует режиму управления, например, в следящих системах.
При этом параметрами установившегося режима будут следующие
Данное устройство рационально применять для определения параметров маломощных приборных двигателей постоянного тока корпусных, типа ДПР-32, ДПР-42, ДПР-52 и т.п. и бескорпусных плоских, типа моментных двигателей постоянного тока с возбуждением от постоянных магнитов марки ДМ различных серий, применяемых в качестве безредукторных приводов, например, в качестве стабилизирующих моторов в гиростабилизаторах.
В качестве примера выбора параметров устройства создания нагрузочного момента двигателя постоянного тока рассмотрим выбор параметров для бескорпусного двигателя типа ДМ-20.
Элементарная площадь сцепления струбцины с фрикционным валом
где 

Элементарная сила сухого трения сцепления струбцины с фрикционным валом
где 

Элементарный момент силы сухого трения сцепления струбцины с фрикционным валом
Суммарный момент силы сухого трения сцепления струбцины с фрикционным валом
который и является нагрузочным моментом 
Выражение (2) можно использовать для определения параметров фрикционного модуля, если известен максимальный момент нагрузки
С другой стороны по максимальному моменту нагрузки и заданному максимальному углу 
Если 

1). В соответствии с (3) максимальное давление, развиваемое винтом 6.1 в струбцине будет равно

2). В соответствии с (4) маятниковость будет равна
Задавая из конструктивных соображений 
Например, если 
Размеры груза (материал латунь, 

где 
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для идентификации параметров двигателя постоянного тока | 2024 |
|
RU2828829C1 |
| Способ определения параметров моментного двигателя постоянного тока | 2022 |
|
RU2796641C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СТАБИЛИЗИРОВАННЫЙ ГЕНЕРАТОР ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2542711C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ ВЯЗКОСТИ ФЕРРОМАГНЕТИКОВ | 2007 |
|
RU2338216C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОГЕНЕРАТОРОМ | 2013 |
|
RU2537394C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2012 |
|
RU2518975C2 |
| Способ измерения пульсаций пускового момента трехфазного вентильного двигателя | 1982 |
|
SU1069084A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ ПРИ КВАЗИЛИНЕЙНОЙ ЗАКОНОМЕРНОСТИ ИХ ИЗМЕНЕНИЯ В ЛЕНТОЧНО-КОЛОДОЧНЫХ ТОРМОЗАХ БУРОВЫХ ЛЕБЕДОК | 2010 |
|
RU2507423C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
Изобретение относится к области электротехники, а именно к устройствам определения параметров электрических машин, и может найти применение при создании установок для идентификации параметров, например, моментных двигателей постоянного тока. Технический результат заключается в упрощении конструкции фрикционного модуля для создания момента нагрузки на валу двигателя. Устройство создания нагрузочного момента двигателя постоянного тока содержит двигатель 1, статор которого закреплен в корпусе, а ротор кинематически с помощью фрикционного вала 5 соединен с ротором измерителя частоты вращения 4, закрепленного также на корпусе. Также содержит регулируемый источник постоянного напряжения, подключенный на вход ротора двигателя, измерители напряжения и тока двигателя. Для создания нагрузочного регулируемого момента относительно оси вращения применен фрикционный модуль 6, с которым жестко с помощью штанги 13 связан маятниковый груз 7. Фрикционный модуль 6 представляет собой струбцину с внутренней цилиндрической поверхностью, охватывающей фрикционный вал 5. Сила сжатия струбцины регулируется перемещением винта 6.1, а фрикционный момент нагрузки, создаваемый при вращении фрикционного вала 5, определяется по формуле

где 



Устройство создания нагрузочного момента двигателя постоянного тока, содержащее собственно двигатель, статор которого закреплен в корпусе, а ротор кинематически с помощью фрикционного вала соединен с ротором измерителя частоты вращения, закрепленного также на корпусе, регулируемый источник постоянного напряжения, подключенный на вход ротора двигателя, измерители напряжения и тока двигателя, а также функциональный узел создания нагрузочного регулируемого момента относительно оси вращения в виде фрикционного модуля, отличающееся тем, что фрикционный модуль, с которым жестко связан маятниковый груз, представляет собой струбцину с внутренней цилиндрической поверхностью, охватывающей фрикционный вал, сила сжатия которой регулируется перемещением винта, а фрикционный момент нагрузки, создаваемый при вращении фрикционного вала, определяется по формуле

где 



| СТЕНД ДЛЯ ИЗУЧЕНИЯ СРЕДСТВ АВТОМАТИЗАЦИИ ИСПЫТАНИЙ ЭЛЕКТРИЧЕСКИХ МОТОР-РЕДУКТОРОВ | 2007 |
|
RU2334967C1 |
| CN 113910145 A, 11.01.2022 | |||
| CN 112179539 A, 05.01.2021 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ РЕДУКТОРА | 2003 |
|
RU2257560C1 |
| CN 102589785 A, 18.07.2012. | |||

