Изобретение относится к области обучающих устройств, а именно к техническим средствам для автоматизации испытаний электрических мотор-редукторов, предназначено для измерения параметров электрических микромашин, снабженных редуктором, и может быть использовано для изучения и измерения электрических и неэлектрических параметров устройств маломощного электропривода.
Наиболее близким техническим решением, выбранным в качестве прототипа, является автоматизированная система для испытания асинхронных электродвигателей («Испытания электрических микромашин», п/р проф. Н.В.Астахова, М.: Высшая школа, 1984 г, стр.44-47), которая состоит из источника питания, испытуемого объекта, блока управления испытуемым двигателем, измерителя электрических величин, измерителя неэлектрических величин, преобразователя «угол-код», управляющей вычислительной машины и интерфейсов.
Недостатками данного прототипа являются невозможность измерения электрических и неэлектрических параметров маломощного электропривода при очень низких скоростях вращения и малых углах поворота выходного вала. Невозможность измерения электрических и неэлектрических параметров при заторможенном вале редуктора, невозможность плавного регулирования параметров вращения, в частности, тормозного момента, при низких скоростях вращения вала.
Задача, решаемая изобретением, - расширение функциональных возможностей стенда за счет более точной и плавной регулировки тормозного момента в широком диапазоне значений момента на валу: при низких скоростях вращения вала, заторможенном вале и при изменяемых моментных нагрузках на валу мотор-редуктора.
Указанная задача выполняется за счет того, что в стенд для изучения средств автоматизации испытаний электрических мотор-редукторов, содержащий источник питания, испытываемый объект, измеритель электрических величин, первым выходом подключенный к испытываемому объекту, измеритель неэлектрических величин, содержащий преобразователь «угол-код», и управляющую вычислительную машину, которая через интерфейсный блок соединена с вторым выходом измерителя электрических величин и с выходом измерителя неэлектрических величин, дополнительно введены управляемое тормозное устройство, соединенное с испытываемым объектом (мотор-редуктор), и устройство дискретного вывода, первый выход которого подключен к управляемому тормозному устройству, второй выход - к источнику питания, выполненному управляемым, а вход - к интерфейсному блоку, измеритель электрических величин содержит датчик силы тока, вход которого соединен с управляемым источником питания, а выход является первым выходом измерителя электрических величин, и аналого-цифровой преобразователь, выход которого является вторым выходом измерителя электрических величин, измеритель неэлектрических величин содержит устройство дискретного ввода, выход которого является выходом измерителя неэлектрических величин, а вход подключен к выходу преобразователя «угол-код», вход которого является входом измерителя неэлектрических величин и соединен с испытываемым объектом.
Управляемое тормозное устройство выполнено в виде тормозного барабана, размещенного между фрикционными подвижной и неподвижной колодками, причем к неподвижной фрикционной колодке подвижно крепится котировочный винт, резьба которого находится в зацеплении с резьбой отверстия в одном из плеч П-образной крепежной скобы, а к подвижной фрикционной колодке неподвижно крепится шток, проходящий через отверстие во втором плече П-образной скобы, другой конец которого через гибкую тягу взаимосвязан с тяговым барабаном, расположенным на валу электропривода, закрепленного также на втором плече П-образной скобы, а на штоке находится цилиндрическая пружина.
Выполнение источника питания управляемым как расширяет число испытуемых мотор-редукторов, так и позволяет снимать семейство нагрузочных характеристик при различных величинах напряжения питания.
Введение в состав стенда измерителя электрических величин датчика силы тока и АЦП позволяет точно измерять величину силы тока, протекающего через мотор-редуктор.
Введение в состав измерителя неэлектрических величин устройства дискретного ввода позволяет с заданным шагом по времени вводить коды углов поворота вала мотор-редуктора в ЭВМ, что расширяет функциональные возможности стенда и позволяет использовать стенд в режиме следящих систем различного типа.
Введение в состав стенда управляемого тормозного устройства позволяет в автоматическом режиме за счет программно-управляемого нагружения вала мотор-редуктора измерять нагрузочные характеристики мотор-редукторов при холостом ходе мотор-редуктора, при заторможенном вале испытываемого мотор-редуктора и различных рабочих режимах, что расширяет функциональные возможности стенда.
Введение в состав стенда устройства дискретного вывода позволяет осуществить точное регулирование тормозного момента путем изменения длительности воздействия на тяговый барабан и, соответственно, угла его поворота. Поворот тягового барабана обеспечивает регулирование тормозного момента путем изменения силы сжатия тормозного барабана фрикционными колодками, создаваемой пружиной на штоке подвижной колодки, сжимаемой при вращении тягового барабана. Тем самым ослабляется регулируемая сила сжатия тормозного барабана.
Приведенная совокупность признаков, характеризующих заявленный объект, обуславливает достижение технического результата, обеспечивающего решение задачи изобретения.
Анализ уровня техники показывает, что не известен стенд, которому присущи признаки, идентичные всем существенным признакам данного изобретения. Это говорит о новизне предложенного технического решения.
Предложенное техническое решение применимо, работоспособно, осуществимо и воспроизводимо, так как может быть изготовлено в условиях серийного и единичного производства с применением выпускаемых серийно комплектующих и, следовательно, соответствует условию патентоспособности "промышленная применимость".
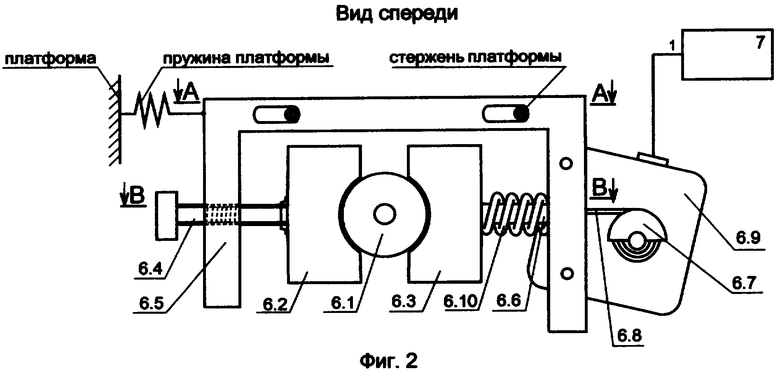
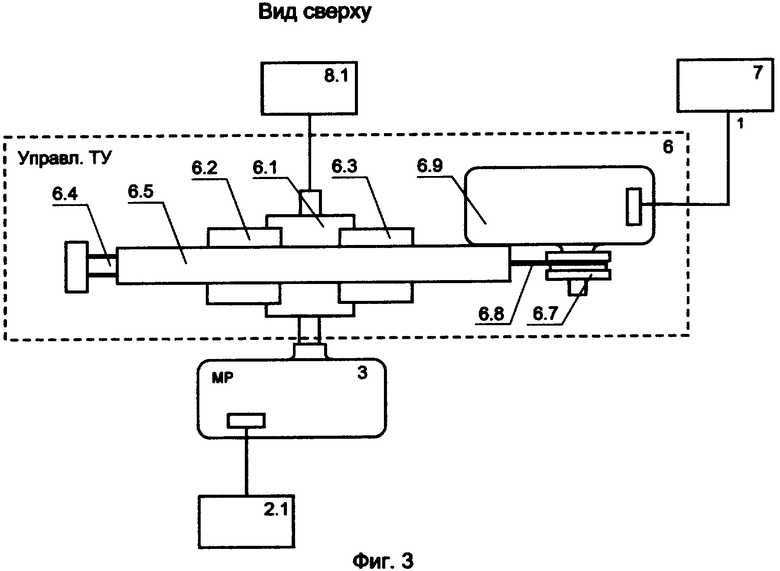
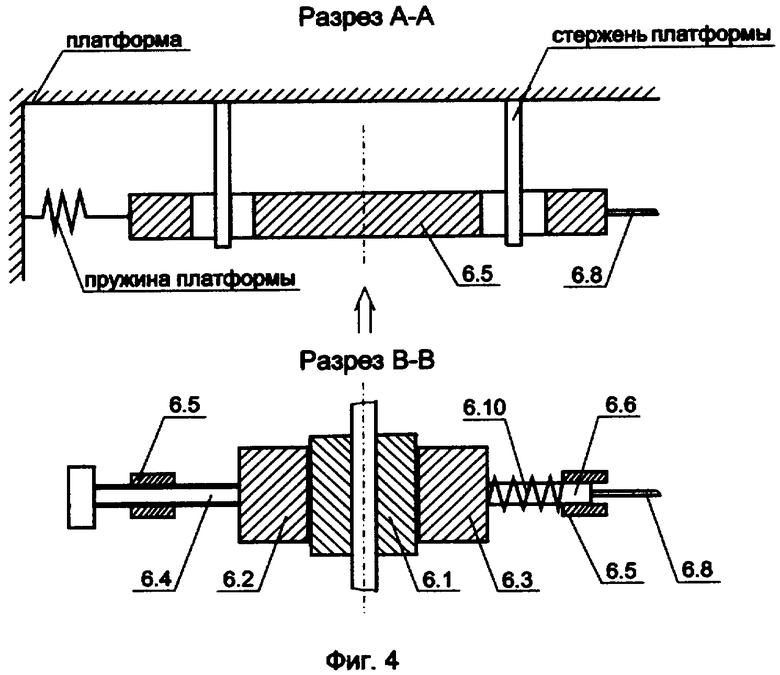
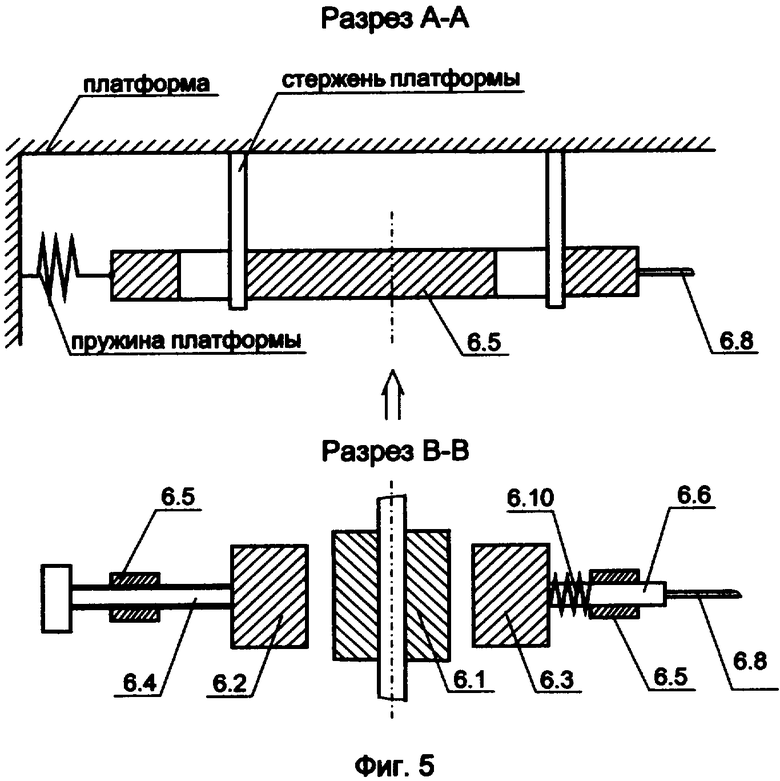
На фиг.1 изображена структура стенда, на фиг.2 - пример выполнения управляемого тормозного устройства (вид спереди); на фиг.3 - пример выполнения управляемого тормозного устройства с подключением элементов стенда (вид сверху, фиг.4 - разрез А-А на фиг.2 с вынесенным из под крепежной скобы разрезом В-В в исходном положении; фиг.5 - разрез А-А на фиг.2 с вынесенным из под крепежной скобы разрезом В-В в режиме холостого хода.
Стенд для изучения средств автоматизации испытаний электрических мотор-редукторов содержит источник питания 1 управляемый, измеритель электрических величин 2, содержащий последовательно соединенные датчик 2.1. силы тока и аналого-цифровой преобразователь (АЦП) 2.2 (фиг.1). Источник питания 1 через датчик 2.1, выход которого является первым выходом измерителя электрических величин 2, подключен к мотор-редуктору 3, который является испытываемым объектом данного стенда. Выход АЦП 2.2 является вторым выходом измерителя электрических величин 2, который через интерфейсный блок 4 соединен с управляющей вычислительной машиной 5 (ЭВМ). Управляемое тормозное устройство 6 содержит тормозной барабан 6.1 (фиг.2, 3), размещенный с небольшим зазором между фрикционными неподвижной 6.2 и подвижной 6.3 колодками. К неподвижной колодке 6.2 подвижно, например с помощью шарнира, крепится котировочный винт 6.4, резьба которого находится в зацеплении с резьбой отверстия в одном из плеч П-образной крепежной скобы 6.5. Подвижное соединение колодки 6.2 с юстировочным винтом 6.4 необходимо для ее настойки до номинальной нагрузки относительно тормозного барабана 6.1 перед проведением испытаний. П-образная крепежная скоба 6.5 (фиг.2) установлена на платформе стенда подвижно за счет пружины, соединяющей их. Перемещение П-образной крепежной скобы 6.5 осуществляется относительно стержней платформы стенда, размещенных в двух овальных прорезях перекладины скобы 6.5. Подвижная колодка 6.3 жестко закреплена на штоке 6.6, например, с помощью гайки с шайбой (на фиг.2 не показано), который проходит через отверстие во втором плече П-образной крепежной скобы 6.5. Другой конец штока 6.6 взаимосвязан с тяговым барабаном 6.7 посредством гибкой тяги 6.8. Тяговый барабан 6.7 размещен на валу электропривода 6.9, закрепленного на втором плече П-образной крепежной скобы 6.5. На штоке 6.6 между подвижной колодкой 6.3 и плечом П-образной крепежной скобы 6.5 находится цилиндрическая пружина 6.10, обеспечивающая возврат подвижной колодки 6.3 в исходное положение. Вал мотор-редуктора 3 механически соединен с тормозным барабаном 6.1 управляемого тормозного устройства 6, разъем электропривода 6.9 которого подключен к первому выходу устройства дискретного вывода 7 (фиг.2, 3), второй выход которого соединен с источником питания 1, а управляющий вход через интерфейсный блок 4 - с ЭВМ 5 (фиг.1). Измеритель неэлектрических величин 8 содержит преобразователь угол-код 8.1 и устройство дискретного ввода 8.2, выход которого является выходом измерителя неэлектрических величин 8, который через интерфейсный блок 4 подключен к ЭВМ 5, а вход преобразователя угол-код 8.1 является входом измерителя неэлектрических величин 8 и подключен к валу мотор-редуктора 3. Перед началом испытаний производится настройка тормозного устройства 6. Под действием более сильной пружины 6.10, чем пружина платформы стенда, подвижная колодка 6.3 прижимается к тормозному барабану 6.1 (фиг.4), а неподвижная колодка 6.2 при помощи котировочного винта 6.4 выставляется так, чтобы было обеспечено торможение с заданным начальным моментом. Контроль момента нагружения обеспечивается с помощью датчика момента, который на время настройки устанавливается вместо мотор-редуктора 3. П-образная крепежная скоба 0.5, подвешенная на стержнях платформы стенда самоцентрируется относительно вала мотор-редуктора 3 за счет более слабой пружины платформы стенда, соединенной со скобой 6.5. При этом стержни располагаются в центре прорезей перекладины скобы 6.5.
Стенд работает в трех режимах (заторможенное состояние, холостой ход, рабочий режим), проводимых последовательно или раздельно, в зависимости от программы испытаний мотор-редуктора 3. В зависимости от режима испытаний оператор вводит в ЭВМ 5 соответствующие ему параметры.
1. Режим заторможенного состояния является исходным положением стенда (фиг.2, 4). Команда с ЭВМ 5 подается через интерфейсный блок 4 на устройство дискретного вывода 7, где коды преобразуются в напряжения, подаваемые с первого выхода устройства 7 на электропривод 6.9 тормозного устройства 6 (фиг.2, 3), а со второго выхода - на вход управляемого источника питания 1 (фиг.1). Напряжение, поданное на электропривод 6.9 (фиг.2), поворачивает тяговый барабан 6.7 против часовой стрелки, за счет чего гибкая тяга 6.8 со штоком 6.6 отпускаются, пружина 6.10 разжимается и колодка 6.3 плотно прижимается к тормозному барабану 6.1, а более слабая пружина платформы стенда разжимается и П-образная крепежная скоба 6.5 перемещается вправо, за счет чего неподвижная колодка 6.2 прижимается к тормозному барабану 6.1 полностью затормаживая его и связанный с ним вал мотор-редуктора 3. В этом режиме снимаются электрические характеристики заторможенного состояния испытуемого мотор-редуктора 3. Величина тока, поступающая на мотор-редуктор 3, измеряется с помощью датчика 2.1 (фиг.1). Значение тока преобразуется с помощью АЦП 2.2 в цифровой код и через интерфейсный блок 4 подается на ЭВМ 5. Величина угла поворота вала мотор-редуктора 3 измеряется преобразователем 8.1 и через устройство дискретного ввода 8.2 и интерфейсный блок 4 подается на ЭВМ 5. По данным, поступившим в ЭВМ 5, рассчитываются предельные электрические параметры мотор-редуктора 3.
2. В режиме холостого хода соответствующая режиму команда с ЭВМ 5 подается через интерфейсный блок 4 на устройство дискретного вывода 7 (фиг.1), где код преобразуется в напряжение, подаваемое на электропривод 6.9, вал которого, с размещенным на нем тяговым барабаном 6.7, поворачивается по часовой стрелке. Колодка 6.3 через гибкую тягу 6.8, преодолевая сопротивление пружины 6.10, размещенной на штоке 6.6, оттягивается от тормозного барабана 6.1, освобождая его. При этом усилия более слабой пружины платформы стенда становится достаточно для отвода П-образной крепежной скобы 6.5 влево, за счет чего неподвижная колодка 6.2 также освобождает тормозной барабан 6.1 (фиг.5). Со второго входа устройства дискретного вывода 7 подается напряжение на вход управляемого источника питания 1. В этом режиме снимаются электрические характеристики холостого хода испытуемого мотор-редуктора 3. Величина тока, поступающая на мотор-редуктор 3, измеряется с помощью датчика 2.1. Значение тока преобразуется с помощью АЦП 2.2 в цифровой код и через интерфейсный блок 4 подается на ЭВМ 5. Величина угла поворота вала мотор-редуктора 3 измеряется преобразователем 8.1 и через устройство дискретного ввода 8.2 и интерфейсный блок 4 подается на ЭВМ 5. По данным, поступившим в ЭВМ 5, рассчитываются характеристики холостого хода мотор-редуктора 3.
3. В рабочих режимах проводят серию испытаний для нескольких заданных моментов нагружения вала мотор-редуктора 3, т.е. для нескольких режимов торможения барабана 6.1, параметры которых задаются оператором в ЭВМ 5. Момент нагружения, меньший начального установленного, определяется углом поворота тягового барабана 6.7, соединенного с валом электропривода 6.9. Команды с ЭВМ 5 подаются через интерфейсный блок 4 на устройство дискретного вывода 7, где коды преобразуются в напряжения, подаваемые с первого выхода устройства 7 на электропривод 6.9 тормозного устройства 6, а со второго выхода - на вход управляемого источника питания 1. Далее как и в предыдущих испытаниях данные поступают в ЭВМ 5, снимаются электрические характеристики для каждого из режимов торможения и по полученным данным строятся электромеханические характеристики мотор-редуктора 3 и определяется соответствие полученных характеристик техническим характеристикам данного мотор-редуктора 3.
В качестве датчика тока 2.1 используется низкоомный резистор, в качестве АЦП 2.2 - преобразователь величины падения напряжения на датчике тока в цифровой сигнал, в качестве устройства дискретного вывода 7 - преобразователь цифровых управляющих сигналов в аналоговую форму для подачи сигналов управления на управляемый источник питания 1 и электропривод 6.9 тормозного устройства 6, в качестве устройства дискретного ввода 8.2 - преобразователь числа импульсов в цифровую форму.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство создания нагрузочного момента двигателя постоянного тока | 2022 |
|
RU2796640C1 |
| Установка для идентификации параметров двигателя постоянного тока | 2024 |
|
RU2828829C1 |
| Способ определения параметров моментного двигателя постоянного тока | 2022 |
|
RU2796641C1 |
| МОБИЛЬНЫЙ УЧЕБНО-ЛАБОРАТОРНЫЙ СТЕНД ДЛЯ ИЗУЧЕНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН И ЭЛЕКТРОПРИВОДОВ | 2012 |
|
RU2490720C1 |
| УЧЕБНО-ЛАБОРАТОРНЫЙ СТЕНД ДЛЯ ИЗУЧЕНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН И ЭЛЕКТРОПРИВОДОВ | 2011 |
|
RU2473921C1 |
| Стенд для испытания электроприводов | 2020 |
|
RU2737738C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ КОММУТАЦИОННЫХ УПРАВЛЯЮЩИХ УСТРОЙСТВ ЭЛЕКТРООБОРУДОВАНИЯ АВТОМОБИЛЯ | 2005 |
|
RU2300749C1 |
| Ультразвуковое устройство для измерения контактных давлений | 1990 |
|
SU1746297A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1234727A1 |
| Стенд для испытания электроприводов стрелочных переводов | 2020 |
|
RU2750306C1 |
Изобретение относится к техническим средствам для автоматизации испытаний электрических мотор-редукторов и предназначено для измерения параметров электрических микромашин. Устройство содержит управляющую вычислительную машину, управляемое тормозное устройство, устройство дискретного вывода, источник питания, интерфейсный блок, измеритель электрических величин, аналого-цифровой преобразователь, измеритель неэлектрических величин, преобразователь «угол-код». Измеритель электрических величин содержит датчик силы тока. Измеритель неэлектрических величин содержит устройство дискретного ввода. Технический результат заключается в расширении функциональных возможностей стенда. 1 з.п. ф-лы, 5 ил.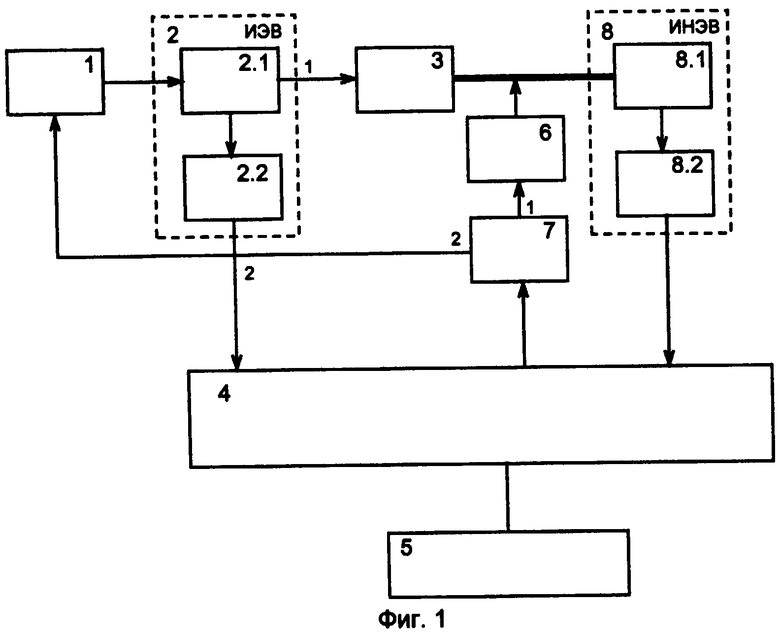
| Стенд для испытания мотор-редукторов | 1990 |
|
SU1747985A2 |
| Устройство оптимизации электропривода стенда для испытаний трансмиссий | 1988 |
|
SU1596305A1 |
| Приспособление для регулирования при помощи сжатого воздуха работы поршневого механизма, управляющее перестановкой жалюзийных клапанов в вентиляционных устройствах | 1932 |
|
SU39951A1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ ДВИЖУЩЕЙ СИЛЫ И УСТРОЙСТВО УПРАВЛЕНИЯ РАСПРЕДЕЛЕНИЕМ ДВИЖУЩЕЙ СИЛЫ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ПРИВОДОМ НА ПЕРЕДНИЕ И ЗАДНИЕ КОЛЕСА | 2019 |
|
RU2786284C1 |

