Область техники, к которой относится изобретение
Настоящее изобретение относится к станку для обработки стержней, предназначенному для гибки и/или изгибания стержней или изделий в целом продолговатой формы, например: стержней, круглых изделий, квадратных изделий, изделий, имеющих круглую, многоугольную или плоскую форму поперечного сечения.
Только в качестве примера, станок для обработки стержней может гнуть и/или изгибать стержень, поданный в форме стержня или в форме бухты или поступивший из центра для нарезания прямолинейных стержней.
Уровень техники
В области строительства и прокладки дорог, и не только, известна потребность в использовании стержней, изготовленных из металла, например железа, стали или другого сплава с пригодными характеристиками, для армирования бетонных конструкций, делая их так называемыми “армированными” конструкциями.
При использовании этих стержней, в более общем виде известных как армирующие стержни, т. е. стержни, используемые для армирования бетона, часто требуется предварительное придание им формы, т.е. предварительная гибка и предварительное изгибание, для получения формы и профиля бетонной конструкции, в которой их применяют для армирования. Под изгибанием авторы в целом понимают деформацию всей или части продольной протяженности стержня, тогда как под гибкой авторы в целом понимают локальную деформацию на особом участке стержня.
Армирующие стержни могут иметь круглое сечение или круглое сечение с выступами и ребрами, улучшающими сцепление с бетоном и, после соответствующего придания формы, они могут быть соединены вместе известным способом для создания требуемых армированных конструкций.
Для этого используют известные станки для обработки стержней, предназначенные для изгибания и/или гибки стержней, например: стержня, круглых изделий, квадратных изделий, имеющих круглую, многоугольную или плоскую форму поперечного сечения. Станки этого типа описаны, например, в документе WO 2017/033145 A1, зарегистрированном на имя Заявителя.
В документе WO 2017/033145 A1 описан комбинированный станок для изгибания и гибки стержня, который содержит опорное основание, предназначенное для поддержания и направления вдоль оси перемещения, и два подвижных ползуна, на каждом из которых установлена рабочая плита. Рабочая плита снабжена загибающим устройством и изгибающим устройством, соответственно предназначенными для загибания и изгибания по меньшей мере части одного или более обрабатываемых стержней.
В частности, загибающее устройство содержит противодействующий ролик и загибающий ролик, между которыми во время использования перемещается стержень, одна или более частей которого подвергаются гибке с радиусом загиба, соответствующим радиусу противодействующего ролика.
Хотя этот комбинированный станок является очень эффективным, так как в нем используется комбинация загибающего устройства и изгибающего устройства, на нем, тем не менее, можно гнуть стержень с единственным радиусом загиба, соответствующим радиусу противодействующего ролика, в данный момент установленного на станке, тогда как, в этой особой области часто необходимо, чтобы этот же стержень был подвергался гибке с различными радиусами загиба, чтобы он отвечал конструктивным требованиям, описанным выше, и, таким образом, для каждого случая станок должен быть снабжен загибающими устройствами, пригодными для получения таких радиусов загиба.
Это, естественно, вызывает некоторую потерю времени и некоторое замедление обработки стержней с различными радиусами загиба из-за постоянного переоснащения станка различными загибающими устройствами или потребностью в выполнении операций гибки на различных станках и, таким образом, в перемещении стержней с одного станка на другой. Кроме того, оператор часто должен выполнять часть работы с одной партией стержней, переоборудовать станок, выполнять дополнительно часть работы со всей партией стержней или с ее частью и т.д. до окончания выполнения операций гибки.
Кроме того, постоянное переоснащение станка вызывает возможные ошибки при установке загибающих устройств, которые, при неправильной установке, могут вызывать ошибки в точности выполнения операций гибки, а также проблемы, связанные с безопасностью для операторов, которым необходимо чаще осуществлять переоборудование станка.
Таким образом, существует потребность в усовершенствовании станка для обработки стержней, чтобы преодолеть по меньшей мере один из недостатков известного уровня техники в данной области.
Одной задачей настоящего изобретения является создание станка для обработки стержней, позволяющем выполнять операции гибки, отличающиеся различными радиусами загиба, без необходимости постоянного переоснащения станка.
Другой задачей настоящего изобретения является создание станка для обработки стержней, который позволяет упростить выполнение различных операций гибки одного и того же стержня.
Дополнительной задачей настоящего изобретения является создание станка для обработки стержней, который сокращает время выполнения различных операций гибки.
Заявитель разработал, испытал и воплотил настоящее изобретение для преодоления недостатков известного уровня техники в данной области и для решения этой и других задач и получения преимуществ.
Раскрытие сущности изобретения
Настоящее изобретение представлено и охарактеризовано в независимых пунктах формулы изобретения, тогда как в зависимых пунктах формулы изобретения описаны другие признаки изобретения или варианты основной идеи изобретения.
Варианты осуществления изобретения, описанные в настоящем документе, относятся к станку для обработки стержней.
Станок для обработки стержней предназначен для обработки по меньшей мере одного стержня, имеющего целом продолговатую форму.
Станок содержит по меньшей мере два опорных ползуна, по меньшей мере один из которых выполнен с возможностью возвратно-поступательного перемещения к другому / от другого вдоль оси перемещения.
Каждый опорный ползун снабжен рабочей плитой, на которой установлено по меньшей мере одно изгибающее устройство, предназначенное для изгибания по меньшей мере продольной части стержня, и по меньшей мере одно первое загибающее устройство.
Первое загибающее устройство снабжено первым противодействующим элементом, имеющим первый радиус загиба, и первым загибающим элементом, выполненным с возможностью выборочного поворота вокруг первого противодействующего элемента для гибки стержня вокруг последнего.
Согласно одному аспекту настоящего изобретения по меньшей мере один из опорных ползунов содержит на рабочей плите по меньшей мере второе загибающее устройство.
Второе загибающее устройство снабжено вторым противодействующим элементом и вторым загибающим элементом, выполненным с возможностью выборочного поворота вокруг второго противодействующего элемента для гибки стержня вокруг последнего.
Второй противодействующий элемент имеет другой радиус загиба, отличающийся от первого радиуса загиба первого противодействующего элемента первого загибающего устройства.
Преимуществом данного способа является то, что на одном и том же станке можно выполнять множество сгибов одного и того же стержня без необходимости выполнения упомянутых сгибов на других рабочих станках, из-за чего потребовалось бы перемещение стержня, или без необходимости переоборудования станка загибающими устройствами, отличающимися от уже установленных.
Изобретение также относится к способу обработки по меньшей мере одного стержня на станке, в частности к способу, посредством которого обеспечивается возможность выполнения по меньшей мере одной операции изгибания по меньшей мере одного стержня и двух или более операций гибки стержня с различными радиусами загиба.
Эти и другие аспекты, признаки и преимущества настоящего изобретения станут более понятными после ознакомления со следующими описанием, чертежами и прилагаемой формулой изобретения. На чертежах, введенных в состав описания и составляющих часть настоящего описания, показано некоторое количество вариантов осуществления настоящего изобретения, и вместе с описанием, они предназначены для пояснения принципов изобретения.
Различные аспекты и признаки, рассмотренные в настоящем описании, могут быть применены отдельно, где это возможно. Эти индивидуальные аспекты, например аспекты и характеристики, описанные в прилагаемых зависимых пунктах формулы изобретения, могут быть целью выделенных заявок.
Понятно, что, если любой аспект или любая характеристика, раскрытые во время процесса патентования, окажутся уже известными, то они не должны быть заявлены и должны быть объектом для отклонения.
Краткое описание чертежей
Эти и другие признаки настоящего изобретения станут очевидными из следующего описания некоторых вариантов осуществления изобретения, приведенных в качестве примеров, которые не являются ограничивающими, со ссылками на прилагаемые чертежи.
На фиг. 1 схематично показан станок для обработки стержней согласно настоящему изобретению;
на фиг. 2–4 – станок, представленный на фиг. 1, во время операций гибки стержня;
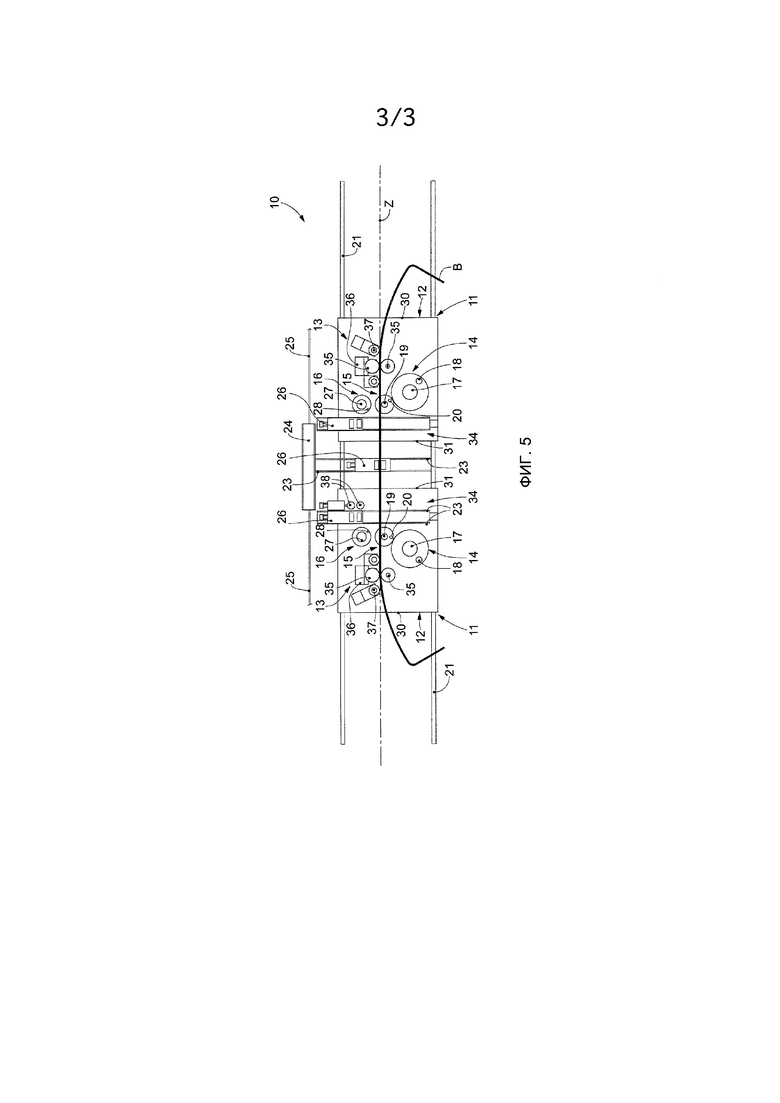
на фиг. 5 – станок, представленный на фиг. 1, во время операции изгибания стержня.
На чертежах для ясности, там, где это возможно, для обозначения одинаковых общих элементов использованы одинаковые номера позиций. Понятно, что элементы и признаки одного варианта осуществления изобретения могут быть подходящим образом введены в другие варианты осуществления изобретения без дополнительных пояснений.
Осуществление изобретения
Далее приведено подробное описание различных вариантов осуществления настоящего изобретения, из которых один или более примеров показаны на прилагаемых чертежах. Каждый пример приведен в качестве иллюстрации изобретения, и его не следует понимать как ограничение изобретения. Например, показанные или описанные признаки, которые являются частью одного варианта осуществления изобретения, могут быть применены в других вариантах осуществления изобретения или добавлены к ним с образованием другого варианта осуществления изобретения. Понятно, что настоящее изобретение включает все такие модификации и варианты.
Перед описанием вариантов осуществления изобретения следует также пояснить, что настоящее описание не ограничено применением деталей конструкции и расположением компонентов, описанных далее со ссылкой на прилагаемые чертежи. В настоящем описании могут быть представлены другие варианты осуществления изобретения, которые могут быть получены или созданы различными другими способами. Следует также пояснить, что формулировки и терминология, используемые в настоящем документе, применяются только в целях описания и не могут рассматриваться как ограничительные.
Варианты осуществления изобретения, описанные со ссылкой на прилагаемые чертежи, относятся к станку для обработки стержней, в целом обозначенному на прилагаемых чертежах ссылочной позицией 10.
Станок 10 предназначен для обработки по меньшей мере одного стержня B, имеющего в целом продолговатую форму.
Стержень B может быть подан в станок 10 непосредственно в виде стержня или в виде бухты для выпрямления и разрезания до требуемого размера, или он может поступать из центра нарезания прямых стержней.
В зависимости от готового изделия, которое необходимо получить, стержни B, подлежащие подаче в станок 10, могут также быть различных типов, например: различных диаметров, из различных материалов, с различной обработкой поверхности и т.п.
В соответствии с некоторыми вариантами осуществления изобретения станок 10 содержит по меньшей мере два опорных ползуна 11, по меньшей мере один из которых выполнен с возможностью возвратно-поступательного перемещения к другому / от другого вдоль оси Z перемещения, при этом каждый из них снабжен рабочей плитой 12.
На рабочей плите 12 установлено по меньшей мере изгибающее устройство 13, предназначенное для изгибания по меньшей мере продольной части стержня B, и по меньшей мере первое загибающее устройство 14, снабженное первым противодействующим элементом 17, имеющим первый радиус R1 загиба, и первым загибающим элементом 18.
Первый противодействующий элемент 17 имеет по меньшей мере профилированную часть с дугообразным профилем, характеризующимся упомянутым радиусом R1 загиба, обозначенным на фиг. 2.
Первый загибающий элемент 18 выполнен с возможностью выборочного поворота вокруг первого противодействующего элемента 17 для гибки стержня B вокруг противодействующего элемента 17.
В соответствии с одним аспектом настоящего изобретения по меньшей мере один из опорных ползунов 11 содержит на рабочей плите 12 по меньшей мере второе загибающее устройство 15, 16, снабженное вторым противодействующим элементом 19, 27 и вторым загибающим элементом 20, 28.
Второй противодействующий элемент 19, 27 также имеет по меньшей мере одну профилированную часть с дугообразным профилем, характеризующимся радиусом R2, R3 загиба, обозначенным, соответственно, на фиг. 3 и 4.
Второй загибающий элемент 20, 28 выполнен с возможностью выборочного поворота вокруг второго противодействующего элемента 19, 27 для гибки стержня B вокруг противодействующего элемента 19, 27.
Второй противодействующий элемент 19, 27 имеет радиус R2, R3 загиба, соответственно, обозначенный на фиг. 3 и 4, который отличается от радиуса R1 загиба, обозначенного на фиг. 2, первого противодействующего элемента 17, для гибки стержня B с различными радиусами загиба.
Это решение позволяет операторам оснащать станок 10 противодействующими элементами и загибающими элементами подходящих размеров для гибки стержня B заранее, без необходимости перерывов во время обработки, например, для замены одного или более противодействующих элементов или одного или более загибающих элементов.
Кроме того, благодаря этому решению обеспечивается возможность выполнения на том же стержне B, в дополнение к операциям изгиба, также операций гибки с различными радиусами загиба, например с первым радиусом R1 загиба и вторым радиусом R2 загиба, без необходимости каких-либо перемещений стержня B или его удаления из станка 10.
Здесь и далее в описании сделаны ссылки на обработку одного стержня B, хотя понятно, что станок 10 может обрабатывать несколько B стержней одновременно.
В соответствии с вариантом осуществления изобретения, показанным на фиг. 1–5, опорные ползуны 11 обращены друг к другу и выполнены с возможностью скольжения по направляющим 21, параллельным друг другу, вдоль оси Z перемещения, как описано выше.
В частности, опорные ползуны 11 выполнены с возможностью перемещения вдоль оси Z перемещения независимо от выполнения конкретных операций на стержне B.
Направляющие 21 могут иметь длину, в направлении оси Z перемещения, сопоставимую с максимальной длиной стержней B, которые могут быть обработаны на станке 10; в этом случае опорные ползуны 11 могут быть расположены на противоположных концах направляющих 21.
Станок 10 также содержит удерживающие средства 22, расположенные между опорными ползунами 11 и предназначенные для поддержания и удержания стержня B во время его обработки. С помощью удерживающих средств 22 предотвращаются нежелательные изгибы стержня B в центральной части, которая, под действием своего собственного веса, обладает тенденцией к деформации.
Удерживающие средства 22 выполнены с возможностью воздействия на стержень B, как описано выше, в плоскости рабочей плиты 12, для предотвращения деформаций стержня B из-за влияния рабочей плиты 12.
Кроме того, в зависимости от длины стержня B, который необходимо поддерживать с помощью удерживающих средств 22, можно использовать одно или более удерживающих средств 22.
В соответствии с вариантом осуществления изобретения, показанным на фиг. 1, удерживающие средства 22 содержат по меньшей мере одно центральное удерживающее средство 22, т.е. удерживающее средство, выполненное с возможностью удержания центральной части стержня B. В частности, центральное удерживающее средство 22 может перемещаться и располагаться в первом направлении, перпендикулярном оси Z перемещения, и во втором направлении, совпадающем с осью Z перемещения или параллельном ей.
Предпочтительно, имеется по меньшей мере три удерживающих средства, при этом два других, боковых удерживающих средства 22 расположены с боковых сторон центрального удерживающего средства 22 и, предпочтительно, симметрично относительно центрального удерживающего средства 22.
Предпочтительно, перемещение центрального удерживающего средства 22 во втором направлении, как описано выше, позволяет ему поддерживать стержень B всегда в его центральной части, несмотря на соответствующее расстояние между опорными ползунами 11.
Боковые удерживающие средства 22 выполнены с возможностью перемещения только в направлениях, параллельных первому направлению, перпендикулярному оси Z перемещения. Боковые удерживающие средства 22 являются вспомогательными по отношению к центральному удерживающему средству 22, если стержень B является очень длинным, т. е. в случае, когда опорные ползуны 11 находятся очень далеко друг от друга, например на противоположных концах направляющих 21.
Удерживающие средства 22 выполнены с возможностью перемещения параллельно первому направлению по направляющим 23 скольжения. Центральное удерживающее средство 22 также выполнено с возможностью перемещения во втором направлении посредством передающего устройства 24, которое выполнено с возможностью перемещения по направляющим 25 скольжения.
В процессе работы, если необходимо поддержание стержня B с использованием более одного удерживающего средства 22, они должны быть выровнены в поперечном направлении, перпендикулярном оси Z перемещения, для исключения образования напряжений и деформаций в стержне B в поперечном направлении.
В некоторых вариантах осуществления изобретения удерживающие средства 22 могут быть выполнены в виде зажима, т. е. содержать две симметричные губки, выполненные с возможностью перемещения в первом направлении. Между губками имеется изменяемый проходной зазор для удержания и освобождения стержня B.
При подаче стержня B в станок 10 известным способом он может поддерживаться с помощью удерживающих средств 22 и может частично опираться на рабочие плиты 12 опорных ползунов 11.
В соответствии с вариантом осуществления изобретения, показанным, например, на фиг. 1, каждая рабочая плита 12 содержит изгибающее устройство 13, первое загибающее устройство 14 и второе загибающее устройство 15, как описано выше.
Здесь и далее в описании под изгибанием понимается непрерывная деформация продольного участка стержня B или всего стержня B. Во время операции изгибания изгибающее устройство 13 приводится в действие для деформации стержня B, когда один или оба опорных ползуна 11 перемещаются в направлении оси Z перемещения.
Здесь и далее в описании под гибкой понимается локальная деформация стержня B только в зоне воздействия выбранного загибающего устройства для выполнения операции, например, как показано на фиг. 2, первого загибающего устройства 14. Во время выполнения операции гибки приводится в действие одно из загибающих устройств 14, 15 для деформирования стержня B, при этом опорные ползуны 11 неподвижны.
В соответствии с вариантом осуществления изобретения, показанным на фиг. 1–5, на каждой рабочей плите 12 также установлено третье загибающее устройство 16, снабженное третьим противодействующим элементом 27 и третьим загибающим элементом 28, выполненным с возможностью выборочного поворота вокруг третьего противодействующего элемента 27 для гибки стержня B вокруг него.
Третий противодействующий элемент 27 имеет размеры, отличающиеся от размеров первого противодействующего элемента 17 и второго противодействующего элемента 19, для гибки стержня B с третьим радиусом R3 загиба (см. фиг. 4), отличающимся от первого радиуса R1 загиба (см. фиг. 2) и от второго радиуса R2 загиба (см. фиг. 3).
В возможных вариантах осуществления изобретения (не показаны) на рабочей плите 12 может быть установлено несколько загибающих устройств, даже больше трех, например до семи, но в любом случае в соответствии с пространством, имеющимся на рабочей плите 12.
В вариантах осуществления изобретения, описанных со ссылкой на фиг. 1–5, изгибающее устройство 13 и загибающие устройства 14, 15 установлены в предпочтительных положениях для улучшения выполнения операций и предотвращения необязательных помех в работе.
В частности, изгибающее устройство 13 может быть установлено во внецентренном положении на рабочей плите 12 ближе к первой боковой стороне 30 рабочей плиты 12, перпендикулярной оси Z перемещения. Загибающие устройства 14, 15 могут быть установлены во внецентренном положении на рабочей плите 12 ближе ко второй боковой стороне 31, противоположной первой боковой стороне 30, даже если не исключена возможность различного расположения.
В соответствии с возможными решениями (не показаны) загибающие устройства 14, 15 могут быть установлены на опорных ползунах 11 в незеркальных положениях, т.е. различным образом.
В соответствии с возможными решениями изгибающее устройство 13 и по меньшей мере загибающие устройства 14, 15 могут приводиться в действие независимо или с помощью одного и того же привода.
В соответствии с одним аспектом настоящего изобретения, показанным на фиг. 1, по меньшей мере один опорный ползун 11 содержит единственное приводное средство, выполненное с возможностью приведения в действие, одновременно или последовательно, по меньшей мере загибающих устройств 14, 15.
Приводное средство содержит двигатель (не показан), снабженный зубчатым колесом 32, находящимся в зацеплении с зубчатым венцом 33.
Зубчатый венец 33 связан с первым загибающим устройством 14, за счет чего обеспечивается возможность поворота по меньшей мере первого загибающего элемента 18 относительно первого противодействующего элемента 17.
Первое загибающее устройство 14 кинематически соединено со вторым загибающим устройством 15 и, при наличии, как в случае, показанном на фиг. 1–5, с третьим загибающим устройством 16 посредством зубчатых колес, схематически показанных штрихпунктирными линиями, посредством которых обеспечивается одновременный поворот загибающих устройств 14, 15, 16.
В соответствии с некоторыми вариантами осуществления изобретения по меньшей мере некоторые из изгибающих устройств 13 и/или загибающих устройств 14, 15 могут быть расположены в убранном положении относительно рабочей плиты 12 соответствующего опорного ползуна 11.
В частности, изгибающие устройства 13 и загибающие устройства 14, 15 выполнены с возможностью перемещения между положением, в котором они выступают из рабочей плиты 12 и в котором они могут воздействовать на стержень B, и убранным положением относительно рабочей плиты 12, в котором они расположены ниже рабочей плиты 12 и не взаимодействуют со стержнем B.
Согласно первому примеру, показанному на фиг. 2, во время гибки стержня B на загибающем устройстве 14 последнее находится в выступающем положении, как описано выше, тогда как второе загибающее устройство 15, третье загибающее устройство 16 и изгибающее устройство 13 находятся в убранном положении, как описано выше.
Согласно второму примеру, показанному на фиг. 3, во время гибки стержня B с помощью по меньшей мере одного загибающего устройства, второе загибающее устройство 15 находится в выступающем положении, как описано выше, тогда как первое загибающее устройство 14, третье загибающее устройство 16 и изгибающее устройство 13 находятся в убранном положении, как описано выше.
Согласно третьему примеру, показанному на фиг. 4, во время гибки стержня B с помощью по меньшей мере одного загибающего устройства, третье загибающее устройство 16 находится в выступающем положении, как описано выше, тогда как первое загибающее устройство 14, второе загибающее устройство 15 и изгибающее устройство 13 находятся в убранном положении, как описано выше.
Согласно четвертому примеру, показанному на фиг. 5, во время гибки стержня B с помощью по меньшей мере одного устройства для гибки, изгибающее устройство 13 находится в выступающем положении, как описано выше, тогда как первое загибающее устройство 14, второе загибающее устройство 15 и третье загибающее устройство 16 находятся в убранном положении, как описано выше.
В соответствии с некоторыми вариантами осуществления изобретения, показанными на фиг. 1–5, изгибающие устройства 13 содержат два противодействующих ролика 35, расположенных напротив друг друга; по меньшей мере один противодействующий ролик 35, предпочтительно, снабжен средствами 36 позиционирования, предназначенными для обеспечения возможности выборочного перемещения к другому противодействующему ролику 35 / от другого противодействующего ролика 35 для регулирования зазора между ними в зависимости от стержня B.
Изгибающие устройства 13 могут быть использованы для обработки стержня B известным способом. В случае, приведенном здесь в качестве примера, показанного на фиг. 5, изгибающие устройства 13 также содержат изгибающий ролик 37, положение которого может быть отрегулировано относительно противодействующих роликов 35 и который выполнен с возможностью осуществления требуемой деформации стержня B.
Положением изгибающего ролика 37 относительно противодействующих роликов 35 определяется изгиб стержня B.
По меньшей мере загибающие устройства 14, 15 предназначены для загибания по меньшей мере одного конца стержня B, чтобы выполнять таким образом операции загиба передних и/или задних частей, но с их помощью можно также обрабатывать стержень B в промежуточном месте.
Если одно из загибающих устройств 14, 15, как описано выше, перемещается в промежуточное место стержня B, то его можно переместить по меньшей мере после частичного изгибания или до начала операции изгиба.
Согласно возможным решениям загибающие устройства 14, 15, 16 могут быть такого типа, который показан на фиг. 1–5, т.е. они могут быть снабжены противодействующими стержневыми элементами 17, 19, 27 и загибающими элементами 18, 20, 28 подобной формы.
Согласно возможному варианту осуществления изобретения загибающие устройства 14, 15, 16 могут содержать противодействующие элементы 17, 19, 27 в виде ковша.
На каждой рабочей плите 12 опорных ползунов 11 также имеются зажимные средства 26, предназначенные для удержания по меньшей мере части стержня B во время выполнения операции гибки. Таким образом, во время выполнения операции гибки напряжения возникают только на том участке стержня B, который подвергается гибке.
Зажимные средства 26 выполнены с возможностью перемещения на рабочей плите 12 в первом направлении, как описано выше, по направляющим 23 скольжения, с помощью которых обеспечивается возможность смещения зажимных средств 26, например, для гарантирования правильного позиционирования стержня B для выполнения любой операции изгибания и гибки.
Зажимные средства 26 могут также быть в виде зажима, как описано выше для удерживающих средств 22.
В соответствии с одним аспектом настоящего изобретения станок 10 содержит тянущее устройство 34, которое установлено по меньшей мере на одном опорном ползуне 11 и выполнено с возможностью перемещения по рабочей плите 12 в направлении, перпендикулярном оси Z перемещения. Тянущее устройство 34 предназначено для того, чтобы тянуть стержень B в направлении оси Z перемещения, или для того, чтобы тянуть по меньшей мере один опорный ползун 11 в этом же направлении.
Тянущее устройство 34 содержит тянущие ролики 38, расположенные в линию в направлении, перпендикулярном оси Z перемещения и определяющие изменяемый проходной зазор между ними для пропуска стержня B и для его перемещения.
В случае, когда опорные ползуны 11 не содержат автономных приводных средств, опорные ползуны 11 выполнены с возможностью перемещения посредством тянущего действия, оказываемого тянущим устройством 34 на стержень B. Например, для перемещения опорного ползуна 11, не содержащего тянущее устройство 34, стержень B должен быть обязательно зажат зажимными средствами 26 опорного ползуна 11, а зажимными средствами 26 другого опорного ползуна 11 стержень B не должен быть зажат. Для перемещения опорного ползуна 11, содержащего тянущее устройство 34, стержень B не должен быть зажат соответствующими зажимными средствами 26, а зажимными средствами 26 другого опорного ползуна 11 стержень B должен быть зажат.
В соответствии с вариантом осуществления изобретения, показанным на фиг. 1–5, тянущее устройство 34 связано с зажимным средством 26 и выполнено с возможностью перемещения вместе с последним.
Даже если это не показано, станок 10 может быть связан с блоком программируемого контроля и управления для контроля и управления элементами опорных ползунов 11.
В соответствии с возможными решениями подвижные компоненты опорных ползунов 11 могут быть выбраны из группы, включающей червячные механизмы, храповые механизмы, цепные механизмы и т.п., или эквивалентные компоненты для обеспечения перемещения.
Варианты осуществления настоящего изобретения также относятся к способу обработки по меньшей мере одного стержня B, имеющего в целом продолговатую форму, в станке 10 для обработки стержней, включающему:
по меньшей мере одну операцию изгибания стержня B посредством изгибающего устройства 13, предназначенного для изгибания по меньшей мере продольной части стержня B;
по меньшей мере первую операцию гибки стержня B посредством первого загибающего устройства 14, снабженного первым противодействующим элементом 17, имеющим первый радиус R1 загиба, и первым загибающим элементом 18, выполненным с возможностью выборочного поворота вокруг первого противодействующего элемента 17; и
по меньшей мере одну дополнительную операцию гибки стержня B посредством второго загибающего устройства 15, 16, снабженного вторым противодействующим элементом 19, 27 и вторым загибающим элементом 20, 28, выполненным с возможностью выборочного поворота вокруг второго противодействующего элемента 19, 27 для гибки стержня B вокруг второго противодействующего элемента. Второй противодействующий элемент 19, 27 имеет радиус R2, R3 загиба, отличающийся от радиуса R1 загиба первого противодействующего элемента 17, для гибки стержня B с различными радиусами загиба.
Понятно, что могут быть выполнены модификации и/или добавления частей в станке для обработки стержней, как описано выше, без отступления от области и объема настоящего изобретения.
Понятно также, что, хотя настоящее изобретение описано со ссылками на некоторые конкретные примеры, специалист в данной области техники может, конечно, представить много других эквивалентных форм станка для обработки стержней, обладающего характеристиками, раскрытыми в формуле изобретения, и, следовательно, подпадающими под объем защиты, определяемый формулой изобретения.


Изобретение относится к обработке стержней. Станок содержит по меньшей мере два опорных ползуна, по меньшей мере один из которых выполнен с возможностью возвратно-поступательного перемещения к другому или от другого вдоль оси перемещения. Каждый из ползунов снабжен рабочей плитой, на которой установлено по меньшей мере одно изгибающее устройство, предназначенное для изгибания по меньшей мере продольной части упомянутого стержня, и по меньшей мере первое загибающее устройство, снабженное первым противодействующим элементом, имеющим первый радиус загиба, и первым загибающим элементом. По меньшей мере один из упомянутых ползунов содержит на упомянутой рабочей плите по меньшей мере второе загибающее устройство, снабженное вторым противодействующим элементом и вторым загибающим элементом. Второй противодействующий элемент имеет радиус загиба, отличный от радиуса загиба первого противодействующего элемента. В результате обеспечивается возможность выполнения операций гибки, отличающихся различными радиусами загиба, без необходимости переоснащения станка. 2 н. и 8 з.п. ф-лы, 5 ил.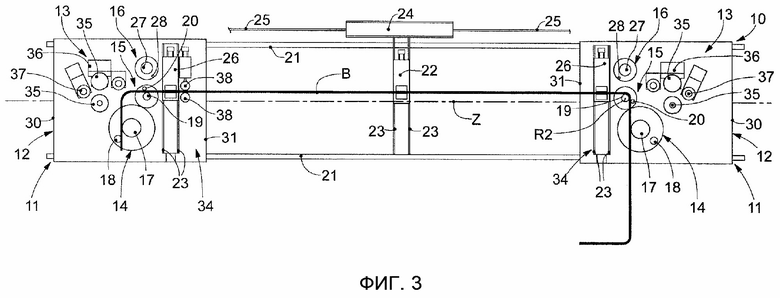
1. Станок для обработки стержней, предназначенный для обработки по меньшей мере одного стержня (B), имеющего в целом продолговатую форму, при этом упомянутый станок содержит по меньшей мере два опорных ползуна (11), по меньшей мере один из которых выполнен с возможностью возвратно-поступательного перемещения к другому или от другого вдоль оси (Z) перемещения, причем каждый из них снабжен рабочей плитой (12), на которой установлено по меньшей мере одно изгибающее устройство (13), предназначенное для изгибания по меньшей мере продольной части упомянутого стержня (B), и по меньшей мере первое загибающее устройство (14), снабженное первым противодействующим элементом (17), имеющим первый радиус (R1) загиба, и первым загибающим элементом (18), выполненным с возможностью выборочного поворота вокруг упомянутого первого противодействующего элемента (17) для гибки упомянутого стержня (B) вокруг последнего, отличающийся тем, что по меньшей мере один из упомянутых ползунов (11) содержит на упомянутой рабочей плите (12) по меньшей мере второе загибающее устройство (15, 16), снабженное вторым противодействующим элементом (19, 27) и вторым загибающим элементом (20, 28), выполненным с возможностью выборочного поворота вокруг упомянутого второго противодействующего элемента (19, 27) для гибки упомянутого стержня (B) вокруг последнего, при этом упомянутый второй противодействующий элемент (19, 27) имеет радиус (R2, R3) загиба, отличный от радиуса (R1) загиба упомянутого первого противодействующего элемента (17).
2. Станок по п. 1, отличающийся тем, что по меньшей мере некоторые из упомянутых изгибающих устройств (13) и/или упомянутых загибающих устройств (14, 15, 16) выполнены с возможностью расположения в убранном положении относительно упомянутой рабочей плиты (12) соответствующего опорного ползуна (11) и перемещения между положением, в котором они выступают из упомянутой рабочей плиты (12), и положением, в котором они убраны относительно упомянутой рабочей плиты (12).
3. Станок по п. 1, отличающийся тем, что по меньшей мере один из упомянутых опорных ползунов (11) содержит единственное приводное средство, выполненное с возможностью приведения в действие, одновременно или последовательно, по меньшей мере упомянутых загибающих устройств (14, 15, 16).
4. Станок по п. 3, отличающийся тем, что упомянутое приводное средство содержит двигатель, снабженный зубчатым колесом (32), находящимся в зацеплении с зубчатым венцом (33), связанным с упомянутым первым загибающим устройством (14), и обеспечивает возможность поворота по меньшей мере упомянутого первого загибающего элемента (18) относительно упомянутого первого противодействующего элемента (17).
5. Станок по п. 1, отличающийся тем, что он содержит тянущее устройство (34), установленное по меньшей мере на одном из упомянутых опорных ползунов (11) и выполненное с возможностью перемещения по упомянутой рабочей плите (12) в направлении, перпендикулярном упомянутой оси (Z) перемещения, при этом оно выполнено с возможностью тянуть упомянутый стержень (B) в направлении упомянутой оси (Z) перемещения или тянуть по меньшей мере один из упомянутых опорных ползунов (11) в этом же направлении.
6. Станок по п. 5, отличающийся тем, что упомянутое тянущее устройство (34) содержит тянущие ролики (38), расположенные в линию в направлении, перпендикулярном упомянутой оси (Z) перемещения и определяющие изменяемый проходной зазор между ними для пропуска упомянутого стержня (B) и для его перемещения.
7. Станок по п. 5, отличающийся тем, что упомянутое тянущее устройство (34) связано с зажимным средством (26), выполненным с возможностью удержания по меньшей мере части стержня (B) во время выполнения операции гибки, и выполнено с возможностью перемещения вместе с последним.
8. Станок по любому из пп. 1–7, отличающийся тем, что он содержит удерживающие средства (22) для удержания стержня (B), при этом по меньшей мере одно из упомянутых удерживающих средств (22) обеспечивает удержание центральной части стержня (B) и выполнено с возможностью перемещения и расположения в первом направлении, перпендикулярном упомянутой оси (Z) перемещения, и во втором направлении, совпадающем с упомянутой осью (Z) перемещения или параллельном этой оси.
9. Станок по п. 8, отличающийся тем, что он содержит удерживающие средства (22), которые являются боковыми по отношению к упомянутому центральному удерживающему средству (22) и выполнены с возможностью перемещения только в направлениях, перпендикулярных упомянутой оси (Z) перемещения.
10. Способ обработки по меньшей мере одного стержня (B), имеющего в целом продолговатую форму, в станке по любому из пп. 1–9, включающий:
по меньшей мере одну операцию изгибания стержня (B) посредством упомянутого изгибающего устройства (13), предназначенного для изгибания по меньшей мере продольной части упомянутого стержня (B);
по меньшей мере одну операцию гибки стержня (B) посредством упомянутого первого загибающего устройства (14), снабженного первым противодействующим элементом (17), имеющим первый радиус (R1) загиба, и первым загибающим элементом (18), выполненным с возможностью выборочного поворота вокруг упомянутого первого противодействующего элемента (17); и
по меньшей мере одну другую операцию гибки стержня (B) посредством упомянутого другого загибающего устройства (15, 16), снабженного вторым противодействующим элементом (19, 27) и вторым загибающим элементом (20, 28), выполненным с возможностью выборочного поворота вокруг упомянутого второго противодействующего элемента (19, 27) для гибки упомянутого стержня (B) вокруг последнего, при этом упомянутый второй противодействующий элемент (19, 27) имеет радиус (R2, R3) загиба, отличный от радиуса (R1) загиба упомянутого первого противодействующего элемента (17), для гибки стержня (B) с различными радиусами загиба.
| WO 2017033145 A1, 02.03.2017 | |||
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 2006 |
|
RU2353455C2 |
| Станок для изготовления гнутых изделий | 1977 |
|
SU688258A1 |
| US 6446484 B1, 10.09.2002. | |||
