Изобретение относится к механическим устройствам, применяемым для обработки промышленных материалов.
Известен манипулятор параллельной структуры «Дельта-робот» [Azad F.A., Rahimi S., Hairi Yazdi M.R., Masouleh M.T. Design and evaluation of adaptive and sliding mode control for a 3-DOF Delta parallel robot. Proceedings of the 28th Iranian Conference on Electrical Engineering (ICEE), 2020, pp. 1-7; Fig. 1]. Манипулятор состоит из неподвижного звена (стойки) и выходного звена (платформы), между которыми установлено три кинематических цепи, каждая из которых снабжена приводом. Недостатком такого манипулятора является отсутствие вращательных степеней свободы выходного звена.
Наиболее близким к заявляемому манипулятору является «Дельта-робот» с линейными приводами [Carabin G., Scalera L., Wongratanaphisan Т., Vidoni R. An energy-efficient approach for 3D printing with a Linear Delta Robot equipped with optimal springs. Robotics and Computer-Integrated Manufacturing, 2021, 67, 102045; Fig. 1]. Он имеет параллельную структуру и состоит из неподвижного звена (стойки) и выходного звена (платформы), между которыми установлены три кинематические цепи, каждая из которых включает направляющую, жестко установленную на стойке, трехпарный (образующий с сопрягаемыми звеньями три кинематические пары) ползун и пару штанг. Каждая кинематическая цепь снабжена линейным приводом, а выходному звену обеспечиваются три поступательные степени свободы.
Данная модель «Дельта-робота» принимается за прототип предлагаемого изобретения. Недостаток прототипа заключается в полном отсутствии вращательных степеней свободы выходного звена. Данный недостаток ограничивает возможности практического применения прототипа.
Техническая проблема, решаемая предлагаемым изобретением, заключается в создании такого манипулятора, в котором кроме поступательных степеней свободы выходного звена, обеспечивались бы также и вращательные.
Данная проблема решается тем, что в предлагаемом пятиподвижном манипуляторе для шлифовки керамических изделий, включающем стойку и платформу, между которыми установлены кинематические цепи, состоящие из направляющих, жестко зафиксированных на стойке, трехпарных ползунов и штанг, согласно изобретению, манипулятор снабжен двухпарными ползунами, при этом между каждым двухпарным ползуном и платформой установлено по одной штанге, причем в одной из кинематических цепей, соединенных с трехпарным ползуном, штанга выполнена в виде группы звеньев, состоящей из вилки, верхней крестовины, стержня, нижней крестовины и выходного звена, на котором жестко установлен инструмент, при этом трехпарный ползун и вилка, а также платформа и выходное звено образуют между собой вращательные шарниры, оси которых параллельны друг другу.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в обеспечении вращательных степеней свободы выходного звена. Данное преимущество способствует расширению возможностей практического применения предлагаемого манипулятора.
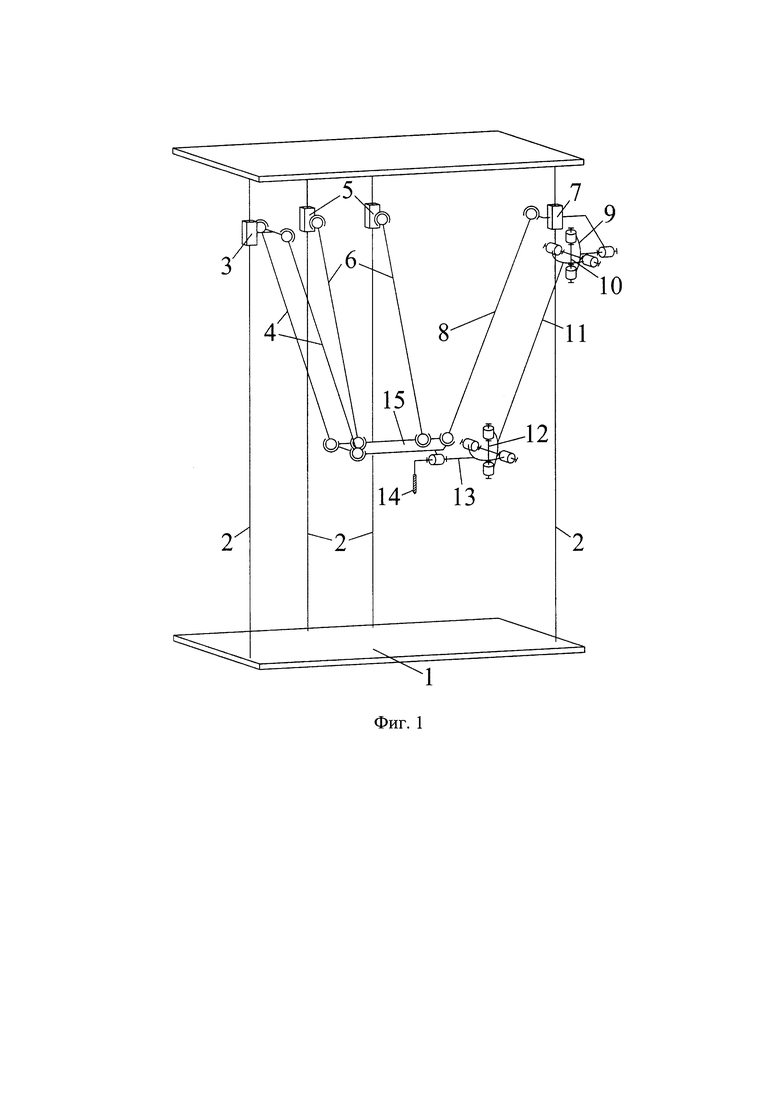
Изобретение поясняется чертежом, где на фиг. 1 показана кинематическая схема пятиподвижного манипулятора для шлифовки керамических изделий. Манипулятор включает неподвижное звено (стойку) 1 и платформу 15, между которыми установлено пять кинематических цепей. Цепи выполнены трех типов. Цепь первого типа состоит из направляющей 2, жестко установленной на стойке 1, трехпарного (образующего с сопрягаемыми звеньями три кинематические пары) ползуна 3 и штанг 4. Цепи второго типа состоят из направляющих 2, жестко установленных на стойке 1, двухпарных (образующих с сопрягаемыми звеньями две кинематические пары) ползунов 5, а также штанг 6. Цепь третьего типа состоит из направляющей 2, жестко установленной на стойке 1, трехпарного ползуна 7, штанги 8, вилки 9, верхней крестовины 10, стержня 11, нижней крестовины 12 и выходного звена 13, на котором жестко установлен инструмент 14.
Ползуны 3, 5 и 7, а также вилка 9 являются приводными звеньями, которым задаются входные движения. Звенья 2 и 3;2 и 5; 2 и 7 образуют поступательные шарниры. Звенья 3 и 4; 4 и 15; 5 и 6; 6 и 15; 7 и 8; 8 и 15 образуют сферические шарниры. Звенья 7 и 9; 9 и 10; 10 и 11; 11 и 12; 12 и 13; 13 и 15 образуют вращательные шарниры.
Принцип работы предлагаемого манипулятора заключается в следующем. При смещении трехпарных и двухпарных ползунов 3, 5 и 7 относительно направляющих 2, жестко установленных на стойке 1, движение передается на штанги 4, 6 и 8, а также на кинематическую цепь, состоящую из вилки 9, верхней крестовины 10, стержня 11, нижней крестовины 12 и выходного звена 13 с жестко установленным инструментом 14, а далее на платформу 15. Так обеспечиваются четыре степени свободы платформе 15 (три линейных смещения и поворот относительно оси, параллельной оси между сферическими шарнирами 4-15). Пятая степень свободы (поворот вокруг оси вращательного шарнира 13-15) обеспечивается за счет кинематической цепи, включающей вилку 9, верхнюю крестовину 10, стержень 11, нижнюю крестовину 12 и выходное звено 13 с жестко установленным инструментом 14. В данной цепи при повороте вилки 9, движение через верхнюю крестовину 10 передается на стержень 11 и далее через нижнюю крестовину 12 на выходное звено 13 с жестко установленным на нем инструментом 14.
Предлагаемый манипулятор может быть применен в устройствах и технологиях по обработке промышленных материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЯТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ПРИВОДНОЙ ИЗБЫТОЧНОСТЬЮ | 2023 |
|
RU2817276C1 |
| ПРОСТРАНСТВЕННЫЙ ПЯТИПОДВИЖНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2801186C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОГО МАНИПУЛИРОВАНИЯ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2801187C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2800733C1 |
| ШЕСТИПОДВИЖНОЕ ПРОСТРАНСТВЕННОЕ УСТРОЙСТВО ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2023 |
|
RU2804666C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2784546C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2800735C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| ЧЕТЫРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2023 |
|
RU2811198C1 |
Изобретение относится к области машиностроения, более конкретно к механическим устройствам, применяемым для обработки промышленных материалов. Пятиподвижный манипулятор для шлифовки керамических изделий включает стойку и платформу, между которыми установлены кинематические цепи. Цепи состоят из направляющих, жестко зафиксированных на стойке, а также трехпарных ползунов и штанг. Манипулятор снабжен двухпарными ползунами, между каждым двухпарным ползуном и платформой установлено по одной штанге. В одной из кинематических цепей, соединенных с трехпарным ползуном, штанга выполнена в виде группы звеньев, состоящей из вилки, верхней крестовины, стержня, нижней крестовины и выходного звена, на котором жестко установлен инструмент. Трехпарный ползун и вилка, а также платформа и выходное звено образуют между собой вращательные шарниры, оси которых параллельны друг другу. Обеспечивается расширение области применения и реализация новых функциональных свойств манипулятора. 1 ил.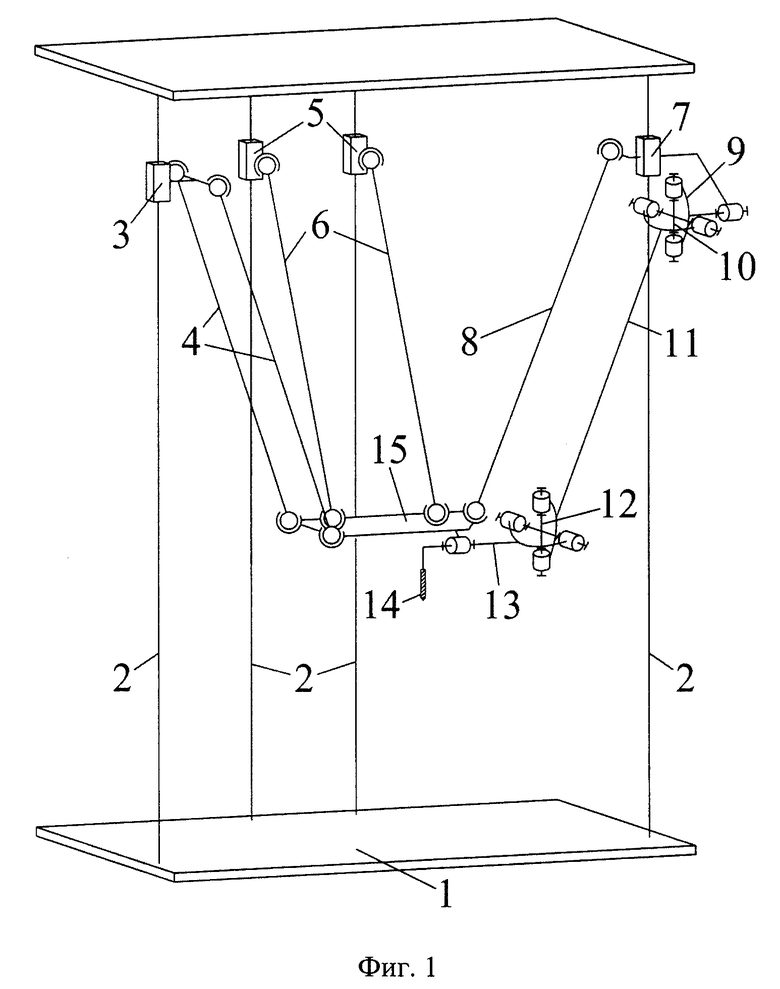
Пятиподвижный манипулятор для шлифовки керамических изделий, включающий стойку и платформу, между которыми установлены кинематические цепи, состоящие из направляющих, жестко зафиксированных на стойке, трехпарных ползунов и штанг, отличающийся тем, что манипулятор снабжен двухпарными ползунами, при этом между каждым двухпарным ползуном и платформой установлено по одной штанге, причем в одной из кинематических цепей, соединенных с трехпарным ползуном, штанга выполнена в виде группы звеньев, состоящей из вилки, верхней крестовины, стержня, нижней крестовины и выходного звена, на котором жестко установлен инструмент, при этом трехпарный ползун и вилка, а также платформа и выходное звено образуют между собой вращательные шарниры, оси которых параллельны друг другу.
| Способ изготовления плавких предохранителей | 1947 |
|
SU72435A1 |
| СТАНОК РЕЛЬСОШЛИФОВАЛЬНЫЙ | 2005 |
|
RU2287633C1 |
| US 5231803 A1, 03.08.1993. | |||

