Данное изобретение относится к вспомогательному устройству центрирования для башни управляемого оператором транспортного средства.
В управляемых оператором транспортных средствах, оборудованных поворотной башней, последняя должна быть зафиксирована в центральном положении во время движения по дороге. Как правило, в данном центральном положении рычаг манипулятора или инструмент, поддерживаемый поворотной башней, обращен вперед или назад, так, чтобы не превышать поперечные габаритные размеры транспортного средства.
В настоящее время центрирование башни выполняется оператором эмпирическим путем с помощью датчиков, которые оповещают оператора при достижении центрального положения. Одним словом, оператор контролирует поворот башни по направлению к центральному положению. При достижении центрального положения оператор получает визуальный сигнал, например, оповещающий световой сигнал.
Так как невозможно мгновенно остановить поворот башни после получения сигнала, оператор выходит за пределы центрального положения и поэтому вынужден несколько раз корректировать положение башни, изменяя направление поворота. Таким образом, это довольно трудоемкая и неэффективная процедура. Кроме того, в известных транспортных средствах, как только достигнуто центральное положение башни, оператор должен вручную активировать средство блокировки для предотвращения выхода башни за пределы центрального положения из-за инерционных нагрузок, возникающих в результате приведения в движение транспортного средства.
Целью изобретения является преодоление вышеупомянутых недостатков путем создания управляемого оператором транспортного средства, оборудованного поворотной башней, в котором позиционирование башни и ее фиксация в центральном положении выполняется просто, быстро и точно.
Дополнительные признаки и преимущества изобретения более очевидны из приведенного ниже подробного описания варианта выполнения изобретения, проиллюстрированного с помощью неограничительного примера на сопутствующих чертежах, на которых:
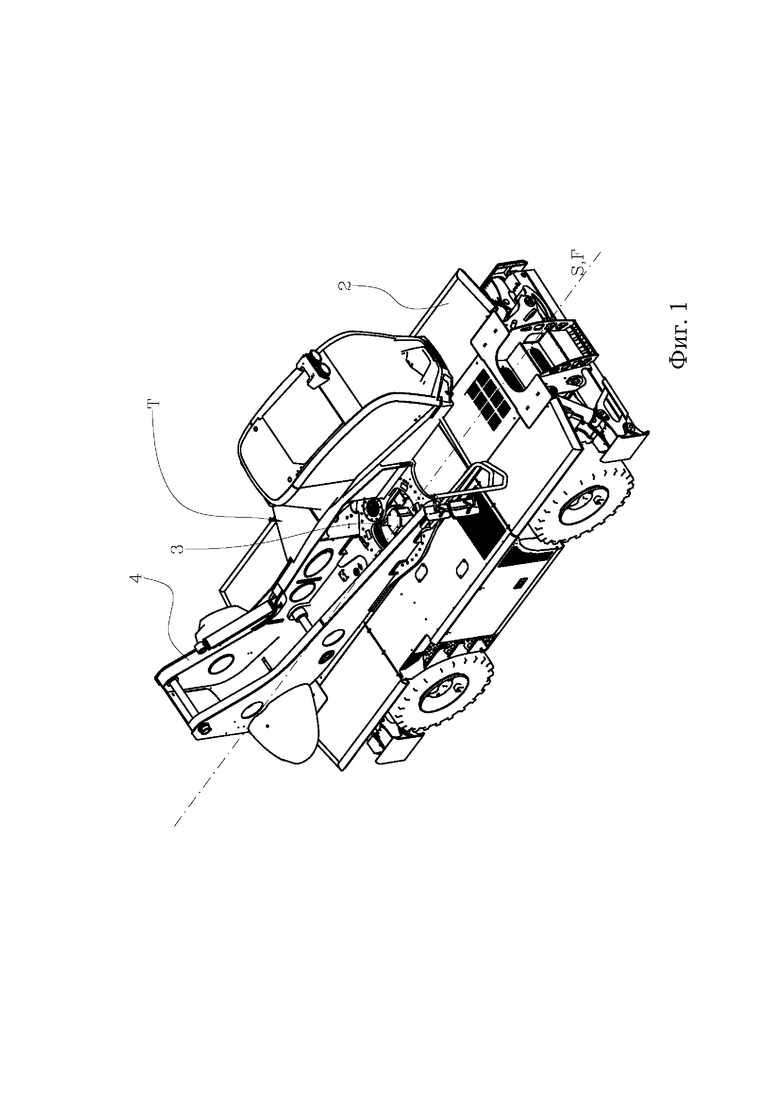
Фиг. 1 изображает вид в изометрии управляемого оператором транспортного средства согласно изобретению;
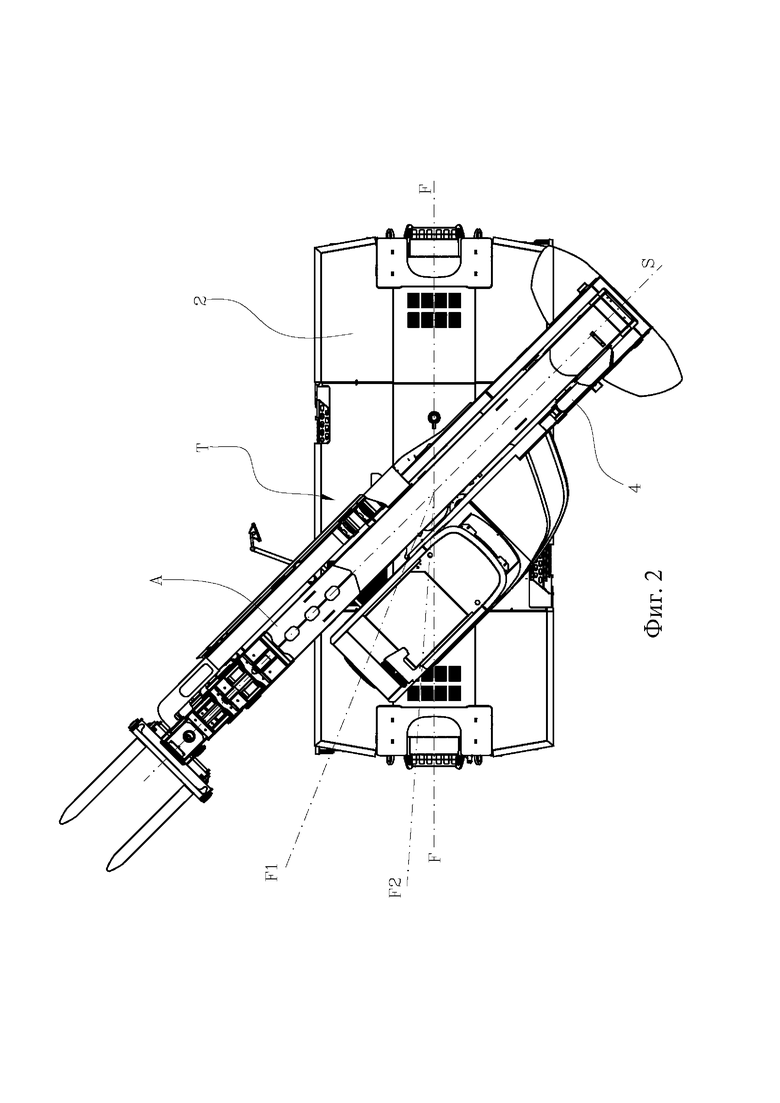
Фиг. 2 изображает вид сверху транспортного средства, показанного на Фиг. 1, оборудованного рычагом, при этом башня находится в поворотном положении;
Фиг. 3 изображает транспортное средство, показанное на Фиг. 2, при этом башня находится в центральном положении.
Управляемое оператором транспортное средство содержит платформу (2). Одним словом, платформа (2) является частью транспортного средства, которая содержит несущую раму, к которой присоединены колеса, двигатель и другие средства для приведения в движение транспортного средства и управления им. В зависимости от типа транспортного средства, размера и поддерживаемых инструментов платформа (2) имеет различные характеристики, известные в области техники.
Платформа (2) содержит посадочное место (3), выполненное с возможностью соединения с соединительной частью (4) башни (Т) с возможностью ее вращения вокруг основной оси вращения. Например, основная ось перпендикулярна к опорной поверхности транспортного средства, то есть, перпендикулярна опорной поверхности колес.
Согласно показанному варианту выполнения соединительная часть (4), образованная задним участком башни (Т), является нижней опорой телескопического рычага (А), оборудованного двумя или более раздвижными скользящими элементами. Телескопический рычаг (А) также выполнен с возможностью поворота относительно соединительной части (4) вокруг оси вращения, перпендикулярной основной оси. Башня (Т) также поддерживает кабину водителя транспортного средства.
Приводные средства известного в данной области техники типа выполнены с возможностью вращения башни (Т) вокруг основной оси. Для облегчения поворота башни (Т) между последней и посадочным местом (3) выполнены поворотные соединительные средства, например, известная в отрасли стойка. Приводные средства включают, например, гидравлический двигатель или электродвигатель.
Транспортное средство согласно изобретению содержит детектор, выполненный с возможностью обнаружения перемещения углового положения башни (Т) по направлению к отсчетному угловому положению относительно основной оси и с возможностью выдачи соответствующего сигнала приближения.
Согласно показанному варианту выполнения отсчетное угловое положение по существу соответствует угловому положению, в котором продольная ось (S) башни (Т) параллельна направлению движения (F) транспортного средства. Например, отсчетное угловое положение является центральным положением башни (Т), то есть соединительной части (4). В таком положении кабина водителя обращена вперед по направлению движения (F), а рычаг (А) расположен параллельно направлению движения (F). Очевидно, что в других транспортных средствах отсчетное угловое положение может указывать на различные оси и направления в зависимости от формы транспортного средства и поддерживаемого инструмента. Специалист в данной области техники может выбрать отсчетные оси или направления согласно требованиям.
Детектор может содержать любой датчик (или датчики), выполненный с возможностью определения углового положения башни (Т), например, без ограничения объема изобретения, датчик приближения, соединенный с башней или посадочным местом (3) или с платформой (2), или кодер или любой другой датчик, пригодный для указанной цели. Если используется датчик приближения, отсчетная часть может, при необходимости, в соответствии с возможным вариантом выполнения, быть соединена с башней (Т), с посадочным местом (3) или с платформой (2) для взаимодействия с датчиком приближения, в положении, обозначающем отсчетное угловое положение. Например, отсчетная часть может быть выполнена в виде единого целого с посадочным местом (3), в то время как датчик приближения может быть соединен с башней (Т), или наоборот. Вместо посадочного места (3) с платформой (2) может быть связан датчик приближения или отсчетная часть.
Детектор выполнен с возможностью обнаружения приближения к отсчетному угловому положению, начиная с заранее заданного начального угла, и оповещения о нем. Другими словами, согласно показанному варианту выполнения, детектор оповещает о приближении к отсчетному угловому положению, когда угол, образованный между продольной осью (S) башни (Т) (подробнее, основной базовой конструкцией башни (Т), на которую сзади опирается вышеуказанная соединительная часть (4)), и направлением подачи (F) становится меньше заданного начального угла.
Когда датчик обнаруживает приближение к отсчетному угловому положению, он посылает соответствующий сигнал приближения, который может быть выполнен так, чтобы было обеспечено изменение с уменьшением угла между угловым положением соединительной части (4) и отсчетным угловым положением. Данный сигнал может быть передан визуальным или акустическим образом оператору, который путем поворота башни (Т) может замедлить и, следовательно, остановить поворот, как только будет достигнуто отсчетное угловое положение. Точное достижение отсчетного углового положения может быть передано определенным иным образом относительно сигнала приближения. Например, сигнал передается оператору в изменяемой форме при приближении к центральному положению. В случае акустического сигнала, возможно изменение его интенсивности и/или частоты при приближении к центральному положению. В случае визуального сигнала, возможно изменение его цвета и/или формы при приближении к центральному положению.
Например, частота акустического сигнала может постепенно увеличиваться по мере приближения к центрированному положению башни (Т), если необходимо до тех пор, пока не станет непрерывной, когда угол станет меньше заданного порогового значения приближения, а визуальный сигнал может быть указателем, представленным на дисплее, цвет и/или форма которого постепенно изменяются пропорционально степени близости к условию центрирования, например серией полос разной высоты или полосой, длина и цвет которой изменяются, и так далее.
Благодаря наличию детектора, маневр для определения отсчетного углового положения башни (Т), таким образом, становится более точным и простым.
Согласно возможному варианту выполнения транспортное средство оборудовано модулем управления, соединенным с приводным средством, выполненным с возможностью регулировки работы и управления ею.
Согласно способу, известному в данной области техники, модуль управления, указанный в данном описании и в последующих пунктах формулы изобретения, в общем указывается в качестве единого блока, но в действительности он может быть оборудован отдельными функциональными модулями (модулями памяти или рабочими модулями), каждый из которых выполнен с возможностью управления заданным средством управляемого оператором транспортного средства и/или для управления циклом операций. Например, дополнительно к приводным средствам модуль управления выполнен с возможностью управления насосами и приводными элементами, находящимися на борту транспортного средства, а также основным двигателем транспортного средства. Одним словом, модуль управления может состоять из одного электронного средства, запрограммированного с возможностью выполнения описанных функций, а различные функциональные модули могут соответствовать аппаратным блокам и/или алгоритмам программного обеспечения, составляющим часть запрограммированного средства. В качестве варианта или дополнительно, эти функции могут быть выполнены электронными средствами, на которые могут быть распределены вышеуказанные функциональные модули. Блоки обработки также могут содержать один или более процессоров для выполнения инструкций, содержащихся в модулях памяти. Блоки и вышеупомянутые функциональные модули также могут быть распределены на разные компьютеры, локально или удаленно, в зависимости от архитектуры сети, в которой они размещены.
Модуль управления выполнен с возможностью приема сигнала приближения, испускаемого детектором, и с возможностью управления движением приводных средств в зависимости от принятого сигнала приближения.
Согласно возможному варианту выполнения модуль управления выполнен с возможностью замедления поворота, производимого приводными средствами, после приема сигнала приближения, испускаемого детектором. В таком случае оператору не нужно изменять свое действие по командам поворота башни для замедления поворота, но модуль управления воздействует непосредственно на приводные средства для замедления поворота башни.
Согласно вышеуказанному варианту выполнения детектор по существу выполнен с возможностью обнаружения по меньшей мере первого положения (F1) приближения, отделенного от отсчетного углового положения первым рабочим углом. Модуль управления выполнен с возможностью замедления поворота, производимого приводными средствами, после получения сигнала приближения в указанном первом положении приближения. Оператор может контролировать остановку поворота в отсчетном угловом положении с помощью команд, имеющихся в его/ее распоряжении, или с помощью модуля управления.
Согласно другому возможному варианту выполнения модуль управления выполнен с возможностью остановки поворота, производимого приводными средствами, после приема сигнала приближения, испускаемого детектором. В таком случае указанное первое положение приближения очень близко к отсчетному угловому положению. В другом случае оператору не нужно изменять свое действие по командам поворота башни для остановки поворота, но модуль управления воздействует непосредственно на приводные средства для остановки поворота башни.
Согласно конкретному варианту выполнения, детектор выполнен с возможностью обнаружения по меньшей мере первого положения приближения, отделенного от отсчетного углового положения первым рабочим углом, и по меньшей мере второго положения приближения, отделенного от отсчетного углового положения вторым рабочим углом, меньшим, чем указанный первый рабочий угол. Согласно данному варианту выполнения модуль управления выполнен с возможностью замедления поворота, производимого приводными средствами, после приема сигнала приближения в указанном первом положении приближения, и для остановки поворота, производимого приводными средствами, после приема сигнала приближения в указанном втором положении приближения. В таком случае указанное второе положение приближения очень близко к отсчетному угловому положению или совпадает с ним.
Согласно возможному варианту выполнения модуль управления выполнен с возможностью автономного приведения в действие приводных средств после соответствующей команды для расположения башни (Т) в отсчетном угловом положении. Одним словом, модуль управления оборудован алгоритмом, который после получения команды от оператора активирует приводные средства для поворота соединительной части в отсчетное угловое положение с использованием датчика согласно способам, описанным выше.
Изобретение, как в версии с ручным управлением, так и в версии с автоматическим управлением, представляет собой вспомогательное устройство для оператора, выполненное с возможностью центрирования башни (Т), то есть ее выравнивания с осью (S) шасси транспортного средства, для любого типа использования или цели, независимо от того, требуется ли это для рабочих операций или для автомобильного транспорта, описанного в качестве примера при обсуждении предшествующего уровня техники.
Управляемое оператором транспортное средство согласно изобретению также может быть оборудовано автоматическим средством блокировки для блокировки башни (Т) в отсчетном угловом положении.
Средство блокировки, известное по своей общей конструкции специалистам в данной области техники, оборудовано приводным элементом, соединенным с модулем управления. Приводной элемент выполнен с возможностью управления с помощью модуля управления для принятия рабочей конфигурации, в которой обеспечивает размещение средства блокировки в активном положении для блокировки башни (Т) в отсчетном угловом положении, и нерабочей конфигурации, в которой он обеспечивает размещение средства блокировки в неактивном положении для освобождения башни (Т) для возможности поворота вокруг основной оси.
Модуль управления выполнен с возможностью активации средства блокировки, переводя его в активное положение, после команды, когда башня (Т) находится в отсчетном угловом положении и неподвижна. Модуль управления выполнен с возможностью перемещения средства блокировки в неактивное положение, когда он получает команду для поворота башни (Т) от оператора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Поворотная башня с балластом | 2020 |
|
RU2800466C2 |
| РОБОТИЗИРОВАННАЯ МОДУЛЬНАЯ ТЕЛЕЖКА | 2023 |
|
RU2800784C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2741456C2 |
| ПОДВИЖНАЯ БОЕВАЯ МАШИНА С КОМПЛЕКСОМ ПРОТИВОДЕЙСТВИЯ УПРАВЛЯЕМОМУ, САМОНАВОДЯЩЕМУСЯ ОРУЖИЮ И АРТИЛЛЕРИЙСКОМУ ОРУЖИЮ С ЛАЗЕРНЫМИ ДАЛЬНОМЕРАМИ | 1998 |
|
RU2151360C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |
| Устройство защиты от беспилотных летательных аппаратов | 2023 |
|
RU2813389C1 |
| Многофункциональная малогабаритная машина повышенной проходимости "Машина Карасева" | 2024 |
|
RU2839666C1 |
| Моделирующее устройство для телескопических погрузчиков | 2021 |
|
RU2831614C2 |
| ОПТОЭЛЕКТРОННЫЙ ПРИЦЕЛ С МОДУЛЬНОЙ БРОНЕВОЙ ЗАЩИТОЙ | 2015 |
|
RU2647811C1 |

Изобретение относится к погрузочным устройствам. Транспортное средство содержит платформу (2), оборудованную посадочным местом (3), поворотную башню (Т), соединенную с посадочным местом (3) с возможностью поворота вокруг основной оси вращения, приводные средства, выполненные с возможностью поворота башни (Т) вокруг указанной основной оси, и детектор, выполненный с возможностью обнаружения перемещения углового положения башни по направлению к отсчетному угловому положению относительно основной оси и с возможностью выдачи соответствующего сигнала приближения. Достигается простота и точность позиционирования башни и ее фиксация в центральном положении. 9 з.п. ф-лы, 3 ил.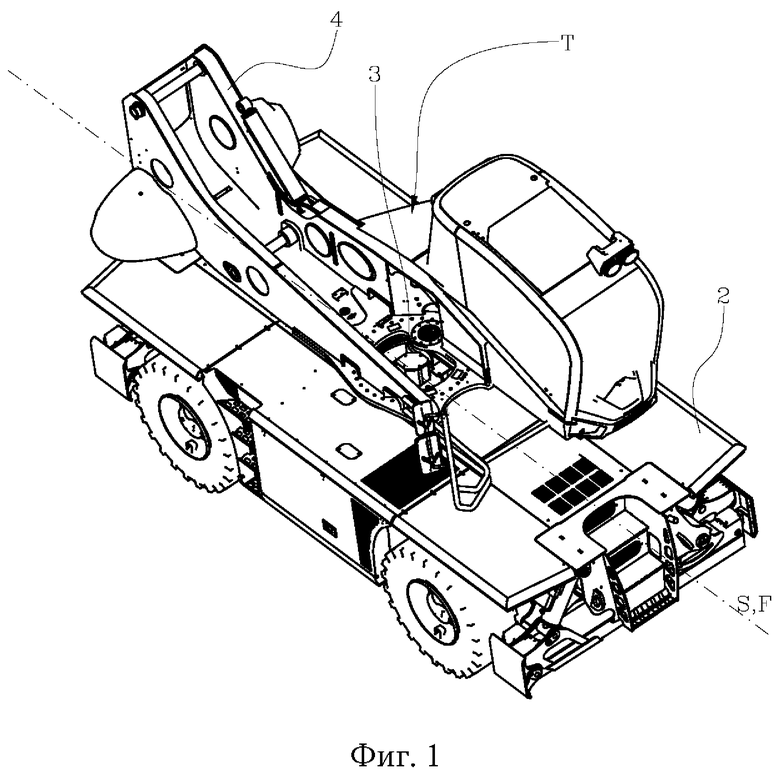
1. Транспортное средство, управляемое оператором, содержащее: платформу (2), оборудованную посадочным местом (3), поворотную башню (Т), соединенную с посадочным местом (3) с возможностью поворота вокруг основной оси вращения, приводные средства, выполненные с возможностью задания поворота башни (Т) вокруг указанной основной оси, детектор, выполненный с возможностью обнаружения перемещения углового положения башни (T) по направлению к отсчетному угловому положению относительно основной оси и с возможностью выдачи соответствующего сигнала приближения, модуль управления, выполненный с возможностью приема сигнала приближения, испускаемого детектором, и с возможностью управления движением приводных средств в зависимости от принятого сигнала приближения, отличающееся тем, что детектор выполнен с возможностью обнаружения по меньшей мере первого положения приближения, отделенного от отсчетного углового положения первым рабочим углом, и по меньшей мере второго положения приближения, отделенного от отсчетного углового положения вторым рабочим углом, меньшим, чем указанный первый рабочий угол, а модуль управления выполнен с возможностью замедления поворота, производимого приводными средствами, после приема сигнала приближения в указанном первом положении приближения, и для остановки поворота, производимого приводными средствами, после приема сигнала приближения в указанном втором положении приближения.
2. Транспортное средство по п. 1, в котором модуль управления выполнен с возможностью замедления поворота, производимого приводными средствами, после приема сигнала приближения, испускаемого детектором.
3. Транспортное средство по п. 1, в котором модуль управления выполнен с возможностью остановки поворота, производимого приводными средствами, после приема сигнала приближения, испускаемого детектором.
4. Транспортное средство по п. 1, в котором детектор (5) выполнен с возможностью обнаружения по меньшей мере первого положения приближения, отделенного от отсчетного углового положения первым рабочим углом, а модуль управления выполнен с возможностью замедления или остановки поворота, производимого приводными средствами, после приема сигнала приближения в указанном первом положении приближения.
5. Транспортное средство по п. 1, в котором модуль управления выполнен с возможностью независимого приведения в действие приводных средств после соответствующей команды для расположения соединительной части (4) в отсчетном угловом положении.
6. Транспортное средство по п. 1, в котором детектор (5) содержит по меньшей мере один датчик приближения, соединенный с башней (Т), или с посадочным местом (3), или с платформой (2).
7. Транспортное средство по любому из пп. 1-6, в котором модуль управления выполнен с возможностью независимого приведения в действие приводных средств после соответствующей команды для расположения башни (T) в отсчетном угловом положении.
8. Транспортное средство по п. 7, в котором модуль управления снабжен алгоритмом, который после получения команды от оператора приводит в действие приводные средства для поворота соединительной части в отсчетное угловое положение с использованием датчика.
9. Транспортное средство по любому из пп. 1-8, содержащее автоматическое средство блокировки, выполненное с возможностью блокировки башни (Т) в отсчетном угловом положении.
10. Транспортное средство по п. 9, в котором средство блокировки снабжено приводным элементом, соединенным с модулем управления, причем приводной элемент выполнен с возможностью управления с помощью модуля управления для принятия рабочей конфигурации, в которой оно обеспечивает размещение средства блокировки в активном положении для блокировки башни (T) в отсчетном угловом положении, и нерабочей конфигурации, в которой обеспечивает размещение средства блокировки в неактивном положении для освобождения башни (Т) для возможности поворота вокруг основной оси (X).
| EP 3228761 A2, 11.102017 | |||
| JP H05116891 A, 14.05.1993 | |||
| СИСТЕМА И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОРГУЗОЧНО- РАЗГРУЗОЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2578649C2 |
| КРУПНОТОННАЖНЫЙ ПОГРУЗЧИК ДЛЯ ИСПОЛЬЗОВАНИЯ ПРИ СТРОИТЕЛЬСТВЕ БОЛЬШОГО КОРАБЛЯ ИЛИ МОРСКОЙ УСТАНОВКИ | 2015 |
|
RU2622435C1 |

