Данное изобретение относится к поворотной башне, оборудованной балластом.
Более конкретно, но не исключительно, изобретение относится к оборудованной балластом поворотной башне для транспортного средства, управляемого оператором.
В транспортных средствах, управляемых оператором и оборудованных поворотной башней, используется балласт для по меньшей мере частичного уравновешивания веса устройства, такого как, например, рычаг манипулятора или другой инструмент, соединенный с самой поворотной башней, на которой также расположена рабочая кабина.
Поворотная башня выполнена с возможностью вращения относительно транспортного средства вокруг основной оси, как правило, перпендикулярной к опорной поверхности транспортного средства. Вращение, которое может совершать башня, обычно представляет собой полный оборот или несколько оборотов в обоих направлениях.
Так как рычаг манипулятора или другой инструмент, соединенный с поворотной башней, часто имеет довольно значительный вес, балласт, соединенный с башней, также имеет столь же значительный вес для обеспечения подходящего уравновешивания для рычага манипулятора. Следовательно, балласт также имеет значительные размеры, которые необходимо учитывать при повороте башни.
Фактически, балласт обычно расположен за кабиной водителя, в положении напротив рычага манипулятора относительно оси вращения башни, так что он выступает в боковом направлении к кабине водителя.
Таким образом, оператор, выполняя поворот башни, должен убедиться, что на круговой траектории, по которой следует балласт, отсутствуют препятствия, чтобы избежать ударов, которые могут вызвать опасные колебания башни и транспортного средства. С другой стороны, внимание оператора направлено в основном на рычаг манипулятора и управление им, поэтому нельзя исключить риск столкновения балласта с препятствием. В настоящее время отсутствуют средства, помогающие оператору отслеживать траекторию движения балласта при повороте башни.
Целью изобретения является создание оборудованной балластом поворотной башни, которая позволяет преодолеть вышеупомянутый недостаток, обеспечивая оператору помощь в отслеживание траектории, по которой следует балласт.
Признаки и преимущества изобретения более очевидны из приведенного ниже подробного описания варианта его выполнения, проиллюстрированного с помощью неограничительного примера на сопутствующих чертежах, на которых:
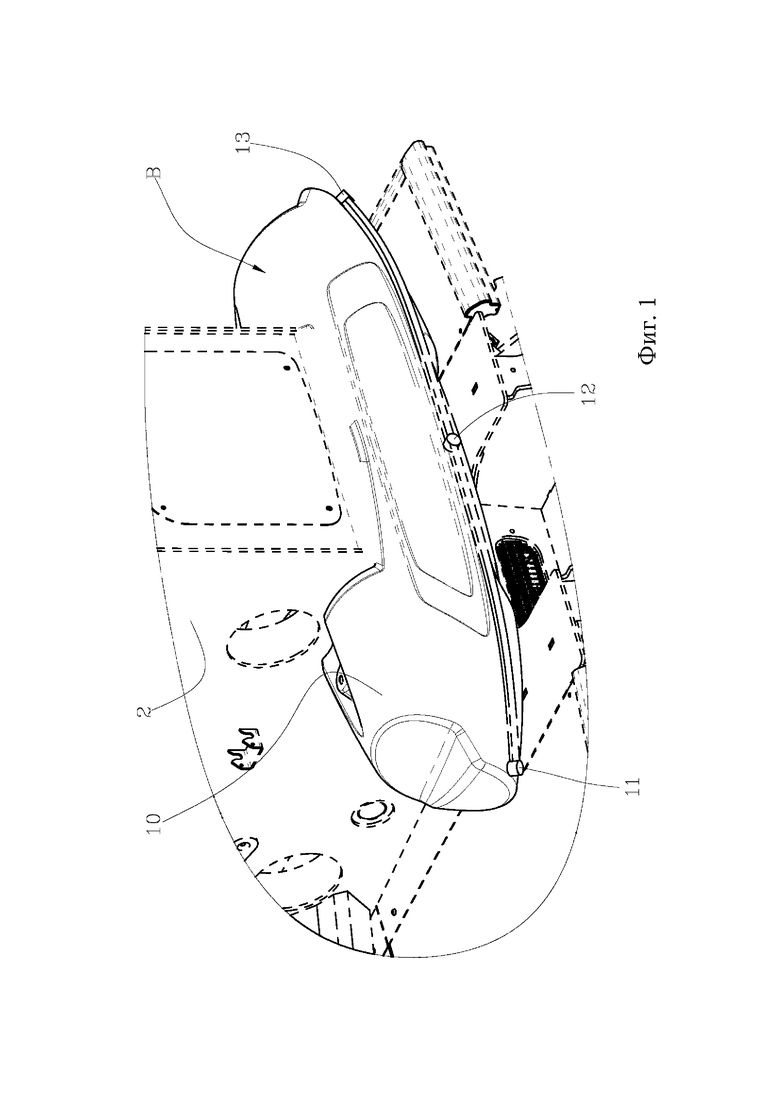
Фиг. 1 изображает вид в изометрии балласта согласно изобретению;
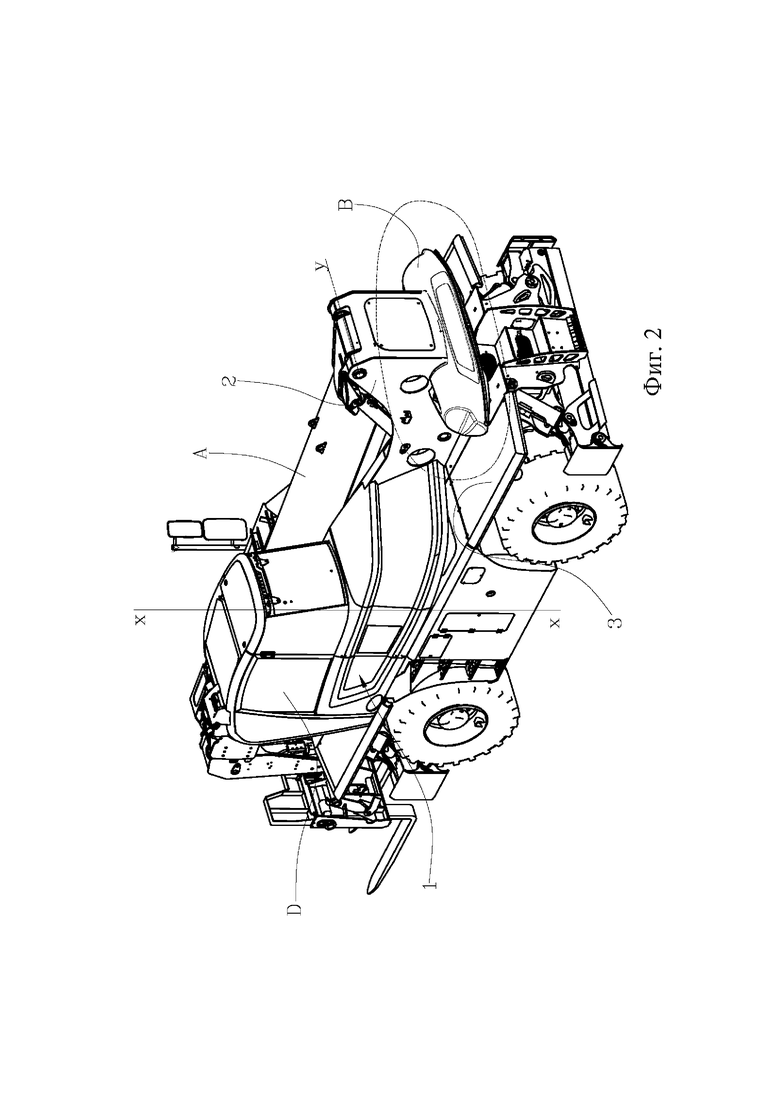
Фиг. 2 изображает вид в изометрии управляемого оператором транспортного средства, оборудованного по меньшей мере одним балластом согласно изобретению.
Балласт согласно изобретению содержит основной корпус (10), имеющий соединительные средства, предназначенные для обеспечения присоединения к поворотной башне транспортного средства, управляемого оператором.
Как показано на Фиг. 2, управляемое оператором транспортное средство содержит платформу (3), оборудованную средствами перемещения, выполненными с возможностью опоры платформы на грунт и перемещения по нему. Одним словом, платформа (3) является частью транспортного средства, содержащей несущую раму, к которой присоединены средства перемещения, двигатель и другие устройства для приведения в движение транспортного средства и для управления им. В зависимости от типа транспортного средства, размера и поддерживаемых инструментов, платформа (3) имеет различные характеристики, известные в области техники. На Фиг. 2 средства перемещения представляют собой колеса, но согласно другим вариантам выполнения, средства перемещения также могут содержать известные в данной области техники гусеницы и/или дополнительные колеса. Средства перемещения соединены с основным двигателем для получения движущей силы, создаваемой двигателем.
Указанное транспортное средство содержит башню (1), оборудованную рамой (2), соединенной с платформой (3) с возможностью вращения вокруг основной оси (X). Согласно неограничительному примеру показанного варианта выполнения, на башне (1) расположено устройство (А), выполненное в форме телескопического рычага, шарнирно присоединенного к раме (2) башни (1) с возможностью поворота вокруг горизонтальной оси (Y) поворота. Телескопический рычаг известным образом выполнен с возможностью поворота вокруг горизонтальной оси (Y) и может располагаться под разными углами наклона в вертикальной плоскости. На башне (1) также расположено водительское место (D) для оператора, оборудованное элементами управления, необходимыми для приведения в движение транспортного средства и устройства (А) и их работы.
Поворотный двигатель известного в данной отрасли типа выполнен с возможностью вращения башни (1) относительно платформы (3) вокруг основной оси (X); предпочтительно, поворотный двигатель является двигателем гидравлического типа и выполнен с возможностью приведения в действие распределителем в соответствии с управляющими сигналами, посылаемыми блоком управления.
Балласт (В) согласно изобретению соединен с рамой (2) башни (1). Согласно показанному неограничительному примерному варианту выполнения балласт (В) соединен с рамой (2) под шарнирно присоединенным концом устройства (А), то есть телескопического рычага. Балласт (В) расположен в зоне позади водительского места (D), то есть позади оператора.
Балласт (В) содержит средство (11, 12, 13) обнаружения, соединенное с основным корпусом (10). Средство обнаружения выполнено с возможностью обнаружения наличия препятствия, расположенного на расстоянии от основного корпуса (10), которое меньше заданного безопасного расстояния. Кроме того, средство обнаружения выполнено с возможностью излучения сигнала приближения, указывающего на наличие препятствия на расстоянии от основного корпуса (10), меньшем, чем указанное безопасное расстояние.
Иными словами, средство обнаружения выполнено с возможностью распознавания наличия препятствия, которое находится ближе к основному корпусу (10), чем заданное безопасное расстояние, и с возможностью излучения соответствующего сигнала, который может передаваться непосредственно оператору в виде акустического или визуального сигнала и/или может передаваться блоку управления, как подробнее описано ниже. Если во время поворота башни (1) балласт (В) перемещается к препятствию ближе, чем на заданное безопасное расстояние, средство обнаружения излучает соответствующий сигнал приближения. Сигнал приближения может быть отправлен непосредственно оператору, который может замедлить и/или остановить поворотный двигатель, остановив балласт перед столкновением с препятствием. В качестве варианта или совместно с сигналом приближения, передаваемым оператору, сигнал приближения может передаваться блоку управления, который может воздействовать на поворотный двигатель.
В частности, управляемое оператором транспортное средство оборудовано модулем управления, например, выполненным в блоке управления и соединенным со средством (11, 12, 13) обнаружения и поворотным двигателем, и этот модуль выполнен с возможностью передачи управляющих сигналов в вышеуказанный распределитель так, что он приводит в действие поворотный двигатель в зависимости от сигнала приближения, излучаемого средством (11, 12, 13) обнаружения. Согласно предпочтительному неограничительному варианту выполнения модуль управления настроен на замедление и/или остановку поворотного двигателя (через распределитель) при наличии сигнала приближения. Другими словами, модуль управления выполнен с возможностью замедления и остановки вращения башни (1) в соответствующий момент путем воздействия на распределитель, который, в свою очередь, управляет поворотным двигателем, для предотвращения удара балласта (В) о препятствие. Данная функция выполняется модулем управления благодаря соответствующему алгоритму. Остановке поворота башни (1) предшествует замедление, необходимое для предотвращения возникновения колебаний.
Согласно возможному варианту выполнения средство (11, 12, 13) обнаружения содержит один или более датчиков приближения. Например, датчики приближения являются ультразвуковыми или радарными датчиками. В любом случае, специалист в данной области техники может выбрать датчик приближения, в котором используется технология, подходящая для запланированного применения. Датчики приближения расположены в наиболее выступающих зонах основного корпуса (10). Например, согласно показанному варианту выполнения основной корпус (10) имеет оживальную форму, вытянутую по существу в горизонтальном направлении. Средство обнаружения содержит датчик (12), расположенный в центральном или среднем положении на основном корпусе (10), и два боковых датчика (11, 13), расположенных на концах основного корпуса (10). Очевидно, что датчики обращены в наружном направлении от транспортного средства.
Благодаря балласту согласно изобретению при наличии как модуля управления, так и сигнала приближения, передаваемого непосредственно в виде акустического или визуального сигнала, оператор может спокойно поворачивать башню, концентрируясь в основном на работе устройства (А). Это связано с тем, что средство обнаружения либо напрямую, либо косвенно посредством модуля управления предупреждает оператора о наличии препятствия на траектории балласта (В), позволяя своевременно останавливать поворот башни с предшествующим замедлением, необходимым для предотвращения возникновения колебаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство, управляемое оператором, имеющее вспомогательное устройство центрирования | 2020 |
|
RU2800469C2 |
| Устройство защиты от беспилотных летательных аппаратов | 2023 |
|
RU2813389C1 |
| Моделирующее устройство для телескопических погрузчиков | 2021 |
|
RU2831614C2 |
| УНИВЕРСАЛЬНАЯ ГЕНЕРИРУЮЩАЯ УСТАНОВКА ТЕПЛОВОГО ГАЗОВОГО ПОТОКА НА ТАНКОВОМ ШАССИ | 2004 |
|
RU2273814C1 |
| Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона | 2021 |
|
RU2770713C1 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |
| Усовершенствованная система отображения информации | 2020 |
|
RU2783717C2 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |
| МОДУЛЬ УПРАВЛЕНИЯ ОГНЕМ БОЕВОЙ МАШИНЫ | 2024 |
|
RU2839539C1 |
Изобретение относится к погрузочным устройствам. Балласт для поворотной башни содержит основной корпус (10), оборудованный соединительными средствами, предназначенными для обеспечения присоединения к поворотной башне, средство (11, 12, 13) обнаружения, соединенное с основным корпусом (10) и выполненное с возможностью обнаружения наличия препятствия, расположенного на расстоянии от основного корпуса (10), которое меньше заданного безопасного расстояния, и с возможностью излучения сигнала приближения, указывающего на наличие препятствия на расстоянии от основного корпуса (10), меньшем, чем указанное безопасное расстояние. Достигается отслеживание траектории, по которой следует балласт. 2 з.п. ф-лы, 2 ил.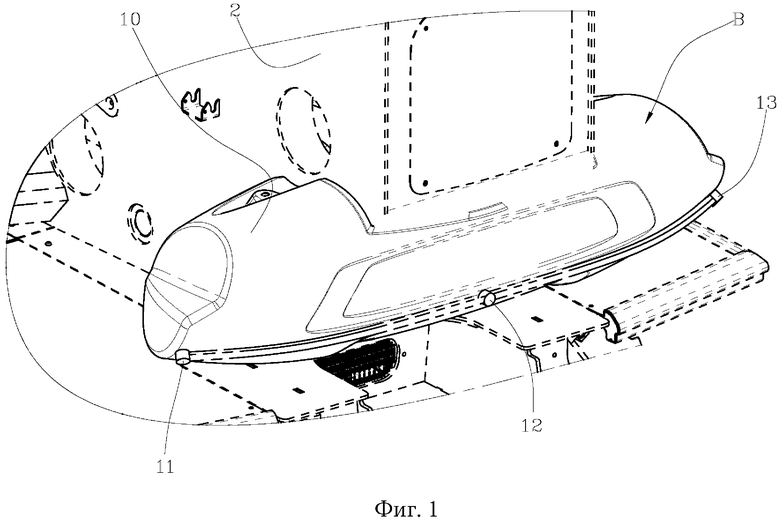
1. Транспортное средство, управляемое оператором, содержащее: платформу (3), оборудованную средствами перемещения, выполненными с возможностью опоры платформы на грунт и перемещения по нему, основной двигатель, соединенный со средствами перемещения, башню (1), оборудованную рамой (2), присоединенной к платформе (3) с возможностью вращения вокруг основной оси (X), поворотный двигатель, выполненный с возможностью вращения башни (1) относительно платформы (3) вокруг основной оси (X), балласт (10), соединенный с рамой (2) башни (1), причем балласт содержит основной корпус (10), оборудованный соединительными средствами, предназначенными для обеспечения присоединения к поворотной башне, средство (11, 12, 13) обнаружения, связанное с основным корпусом (10) и выполненное с возможностью обнаружения наличия препятствия, расположенного на расстоянии от основного корпуса (10), которое меньше заданного безопасного расстояния, и с возможностью излучения сигнала приближения, указывающего на наличие препятствия на расстоянии от основного корпуса (10), меньшем, чем указанное безопасное расстояние, отличающееся тем, что оно содержит модуль управления, соединенный со средством (11, 12, 13) обнаружения и с поворотным двигателем и выполненный с возможностью приведения в действие поворотного двигателя в зависимости от сигнала приближения, излучаемого средством (11, 12, 13) обнаружения, где модуль управления выполнен с возможностью замедления и/или остановки поворотного двигателя при наличии сигнала приближения.
2. Транспортное средство, управляемое оператором, по п. 1, в котором средство (21, 22, 23) обнаружения содержит один или более датчиков приближения.
3. Транспортное средство, управляемое оператором, по п. 2, в котором датчики приближения представляют собой ультразвуковые датчики или радарные датчики.
| JP H07317108 A, 05.12.1995 | |||
| US 2012327261 A1, 27.12.2012 | |||
| CN 106219447 A, 14.12.2016 | |||
| БАЛЛАСТНОЕ УСТРОЙСТВО И КРАН, В ЧАСТНОСТИ КРАН НА ГУСЕНИЧНОМ ХОДУ | 2016 |
|
RU2652303C2 |

