Изобретение относится к гироскопической технике, а более конкретно к двухосным индикаторным гиростабилизаторам на волоконно-оптических датчиках угловой скорости, работающим на пилотируемых и беспилотных летательных аппаратах и предназначенных для стабилизации и управления положением в пространстве оптико-электронного или радиолокационного координатора, определяющего пространственное положение объекта слежения.
Известен двухосный индикаторный гиростабилизатор на микромеханических гироскопах, предназначенный для стабилизации и управления положением координатора в пространстве (Малютин Д.М. Динамические характеристики управляемого гиростабилизатора на датчиках угловой скорости // Фундаментальные и прикладные проблемы техники и технологии. 2018. №6 (332). С.126-141). Двухосный индикаторный гиростабилизатор содержит наружную рамку, установленную на основании с вращением относительно оси параллельной нормальной оси летательного аппарата (нормальная ось расположена в плоскости симметрии летательного аппарата вверх) и расположенную в ней платформу, вращающуюся относительно оси, которая перпендикулярна оси вращения наружной рамки и параллельна поперечной оси летательного аппарата (поперечная ось расположена перпендикулярно плоскости симметрии летательного аппарата), установленный на оси вращения наружной рамки первый датчик момента, вход которого соединен с выходом первого усилителя мощности, вход первого усилителя мощности соединен с выходом первого корректирующего фильтра, вход первого корректирующего фильтра соединен с выходом первого сумматора, первый вход первого сумматора соединен с выходом первого микромеханического датчика угловой скорости, установленного на платформе с осью чувствительности параллельной оси вращения наружной рамки двухосного индикаторного гиростабилизатора; второй датчик момента, вход которого соединен с выходом второго усилителя мощности, вход второго усилителя мощности соединен с выходом второго корректирующего фильтра, вход второго корректирующего фильтра соединен с выходом второго сумматора, первый вход второго сумматора соединен с выходом второго микромеханического датчика угловой скорости установленного на платформе с осью чувствительности параллельной оси вращения платформы двухосного индикаторного гиростабилизатора, координатор, установленный на платформе так, что его визирная ось перпендикулярна плоскости платформы двухосного индикаторного гиростабилизатора, первый выход координатора соединен с входом первого усилителя, выход первого усилителя соединен со вторым входом первого сумматора, второй выход координатора соединен с входом второго усилителя, выход второго усилителя соединен с вторым входом второго сумматора, первый датчик угла, установленный на оси наружной рамки двухосного индикаторного гиростабилизатора, второй датчик угла, установленный на оси платформы двухосного индикаторного гиростабилизатора.
Недостатком такого двухосного индикаторного гиростабилизатора являются большие погрешности автосопровождения объекта слежения, обусловленные большим уровнем смещения нулевого сигнала и большим уровнем шума в выходных сигналах микромеханических датчиков угловой скорости.
Наиболее близким (прототипом) является двухосный индикаторный гиростабилизатор на волоконно - оптических гироскопах для стабилизации и управления положением координатора в пространстве. (Малютин Д.М. Система стабилизации и управления на волоконно-оптических гироскопах // Фундаментальные и прикладные проблемы техники и технологии. 2014. №5 (307). С.121-125).
Двухосный индикаторный гиростабилизатор содержит наружную рамку, установленную на основании с вращением относительно оси параллельной нормальной оси летательного аппарата, и расположенную в ней платформу, вращающуюся относительно оси, которая перпендикулярна оси вращения наружной рамки и параллельна поперечной оси летательного аппарата; установленный на оси вращения наружной рамки первый датчик момента, вход которого соединен с выходом первого усилителя мощности, вход первого усилителя мощности соединен с выходом первого корректирующего фильтра, вход первого корректирующего фильтра соединен с выходом первого сумматора, первый вход первого сумматора соединен с выходом первого волоконно-оптического датчика угловой скорости, установленного на платформе с осью чувствительности параллельной оси вращения наружной рамки двухосного индикаторного гиростабилизатора, второй датчик момента, вход которого соединен с выходом второго усилителя мощности, вход второго усилителя мощности соединен с выходом второго корректирующего фильтра, вход второго корректирующего фильтра соединен с выходом второго сумматора, первый вход второго сумматора соединен с выходом второго волоконно-оптического датчика угловой скорости, установленного на платформе с осью чувствительности параллельной оси вращения платформы двухосного индикаторного гиростабилизатора, координатор, установленный на платформе так, что его визирная ось перпендикулярна плоскости платформы двухосного индикаторного гиростабилизатора, первый выход координатора соединен с входом первого усилителя, выход первого усилителя соединен с вторым входом первого сумматора, второй выход координатора соединен с входом второго усилителя, выход второго усилителя соединен с вторым входом второго сумматора, первый датчик угла, установленный на оси наружной рамки двухосного индикаторного гиростабилизатора, второй датчик угла, установленный на оси платформы двухосного индикаторного гиростабилизатора.
Недостатком прототипа является малый диапазон допустимых угловых скоростей автосопровождения объекта слежения при значительных инерционно-массовых характеристиках координатора, обусловленный нелинейностью вида «ограничение по уровню развиваемого момента» датчиками момента, установленными по осям наружной рамы и платформы двухосного индикаторного гиростабилизатора.
Технической задачей изобретения является увеличение диапазона допустимых угловых скоростей автосопровождения объекта слежения по каналам наружной рамки и платформы двухосного индикаторного гиростабилизатора.
Задача решается тем, что двухосный индикаторный гиростабилизатор содержит наружную рамку, установленную на основании с вращением относительно оси параллельной нормальной оси летательного аппарата и расположенную в ней платформу, вращающуюся относительно оси, которая перпендикулярна оси вращения наружной рамки и параллельна поперечной оси летательного аппарата, первый усилитель мощности, выход которого соединен с входом первого датчика момента, первый корректирующий фильтр, выход которого соединен с входом первого усилителя мощности, первый сумматор, выход которого соединен с входом первого корректирующего фильтра, первый волоконно-оптический датчик угловой скорости, установленный на платформе с осью чувствительности параллельной оси вращения наружной рамки, выход которого соединен с первым входом первого сумматора, второй датчик момента, установленный на оси платформы, второй усилитель мощности, выход которого соединен с входом второго датчика момента, второй корректирующий фильтр, выход которого соединен с входом второго усилителя мощности, второй сумматор, выход которого соединен с входом второго корректирующего фильтра, второй волоконно-оптический датчик угловой скорости, установленный на платформе с осью чувствительности параллельной оси вращения платформы, выход которого соединен с первым входом второго сумматора, координатор, установленный на платформе так, что его визирная ось перпендикулярна плоскости платформы двухосного индикаторного гиростабилизатора, первый усилитель, вход которого соединен с первым выходом координатора, третий корректирующий фильтр, вход которого соединен с выходом первого усилителя, а выход - со вторым входом первого сумматора, второй усилитель, вход которого соединен со вторым выходом координатора, четвертый корректирующий фильтр, вход которого соединен с выходом второго усилителя, а выход - со вторым входом второго сумматора, первый датчик угла, установленный на оси наружной рамки двухосного индикаторного гиростабилизатора, второй датчик угла, установленный на оси платформы двухосного индикаторного гиростабилизатора.
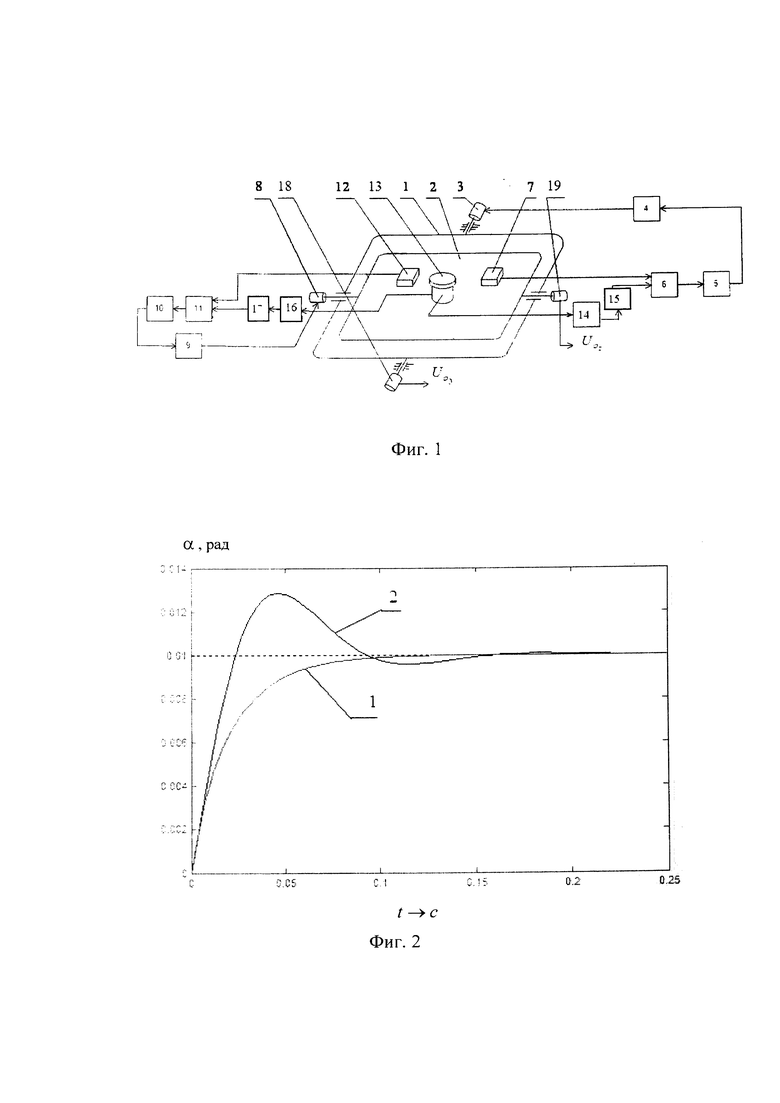
На фиг. 1 изображена принципиальная схема двухосного индикаторного гиростабилизатора. На фиг. 2 изображен график погрешности автосопровождения прототипа и предлагаемого двухосного индикаторного гиростабилизатора по каналу наружной рамки. На фиг. 3 изображен график изменения момента датчика момента по каналу наружной рамки прототипа и предлагаемого двухосного индикаторного гиростабилизатора. На фиг. 4 изображен график погрешности автосопровождения прототипа по каналу наружной рамки. На фиг. 5 изображен график изменения момента датчика момента по каналу наружной рамки прототипа. На фиг. 6 изображен график изменения момента датчика момента по каналу наружной рамки предлагаемого двухосного индикаторного гиростабилизатора по каналу наружной рамки. На фиг. 7 изображен график погрешности автосопровождения предлагаемого двухосного индикаторного гиростабилизатора по каналу наружной рамки. На фиг. 8 изображен график изменения момента датчика момента по каналу наружной рамки прототипа. На фиг. 9 изображен график погрешности автосопровождения прототипа по каналу наружной рамки.
Двухосный индикаторный гиростабилизатор (фиг. 1) содержит наружную рамку 1, установленную на основании с вращением относительно оси параллельной нормальной оси летательного аппарата, и расположенную в ней платформу 2, вращающуюся относительно оси, которая перпендикулярна оси вращения наружной рамки и параллельна поперечной оси летательного аппарата, первый датчик момента 3, установленный на оси вращения наружной рамки 1, первый усилитель мощности 4, выход которого соединен со входом первого датчика момента 3, первый корректирующий фильтр 5, выход которого соединен со входом первого усилителя мощности 4, первый сумматор 6, выход которого соединен со входом первого корректирующего фильтра 5, первый волоконно-оптический датчик угловой скорости 7, установленный на платформе 2 с осью чувствительности параллельной оси вращения наружной рамки 1, выход которого соединен с первым входом первого сумматора 6; второй датчик момента 8, установленный на оси платформы 2, второй усилитель мощности 9, выход которого соединен со входом второго датчика момента 8, второй корректирующий фильтр 10, выход которого соединен со входом второго усилителя мощности 9, второй сумматор 11, выход которого соединен со входом второго корректирующего фильтра 10, второй волоконно-оптический датчик угловой скорости 12, установленный на платформе 2 с осью чувствительности параллельной оси вращения платформы 2, выход которого соединен с первым входом второго сумматора 11, координатор 13, установленный на платформе 2 так, что его визирная ось перпендикулярна плоскости платформы 2, первый усилитель 14, вход которого соединен с первым выходом координатора 13, третий корректирующий фильтр 15, вход которого соединен с выходом первого усилителя 14, а выход - со вторым входом первого сумматора 6, второй усилитель 1, вход которого соединен со вторым выходом координатора 13, четвертый корректирующий фильтр 17, вход которого соединен с выходом второго усилителя 16, а выход - со вторым входом второго сумматора 11, первый датчик угла 18, установленный на оси наружной рамки 1 двухосного индикаторного гиростабилизатора, второй датчик угла 19, установленный на оси платформы 2 двухосного индикаторного гиростабилизатора.
Работа устройства происходит следующим образом.
При качке основания платформа 2 стремится сохранить свое положение в пространстве (в режиме стабилизации) благодаря обратной связи с первого волоконно-оптического датчика угловой скорости 7 через первый сумматор 6, первый корректирующий фильтр 5, первый усилитель мощности 4 на первый датчик момента 3 по каналу наружной рамки 1 и благодаря обратной связи со второго волоконно-оптического датчика угловой скорости 12 через второй сумматор 11, второй корректирующий фильтр 10, второй усилитель мощности 9 на второй датчик момента 8 по каналу платформы 2. Передаточная функция первого корректирующего фильтра 5 имеет вид  , что обеспечивает интегрирование сигнала первого волоконно-оптического датчика угловой скорости 7 и требуемые запасы устойчивости по каналу стабилизации наружной рамки 1. Здесь Tkz1 - постоянная времени первого корректирующего фильтра 5, р-оператор Лапласа. Передаточная функция второго корректирующего фильтра 10 имеет вид
, что обеспечивает интегрирование сигнала первого волоконно-оптического датчика угловой скорости 7 и требуемые запасы устойчивости по каналу стабилизации наружной рамки 1. Здесь Tkz1 - постоянная времени первого корректирующего фильтра 5, р-оператор Лапласа. Передаточная функция второго корректирующего фильтра 10 имеет вид  , что обеспечивает интегрирование сигнала второго волоконно-оптического датчика угловой скорости 12 и требуемые запасы устойчивости по каналу стабилизации платформы 2. Здесь Tkz2 - постоянная времени второго корректирующего фильтра 10. При включении режима автосопровождения объекта слежения координатор 13 вырабатывает сигнал пропорциональный углу рассогласования а (погрешность автосопровождения) между его визирной осью и направлением на объект слежения по каналу наружной рамки 1 на первом выходе и пропорциональный углу рассогласования β (погрешность автосопровождения) между его визирной осью и направлением на объект слежения по каналу платформы 2 на втором выходе. Сигнал с первого выхода координатора 13 поступает на вход первого усилителя 14 с коэффициентом усиления Ky3, выходной сигнал первого усилителя 14 поступает на вход третьего корректирующего фильтра 15. Передаточная функция третьего корректирующего фильтра 15 имеет вид
, что обеспечивает интегрирование сигнала второго волоконно-оптического датчика угловой скорости 12 и требуемые запасы устойчивости по каналу стабилизации платформы 2. Здесь Tkz2 - постоянная времени второго корректирующего фильтра 10. При включении режима автосопровождения объекта слежения координатор 13 вырабатывает сигнал пропорциональный углу рассогласования а (погрешность автосопровождения) между его визирной осью и направлением на объект слежения по каналу наружной рамки 1 на первом выходе и пропорциональный углу рассогласования β (погрешность автосопровождения) между его визирной осью и направлением на объект слежения по каналу платформы 2 на втором выходе. Сигнал с первого выхода координатора 13 поступает на вход первого усилителя 14 с коэффициентом усиления Ky3, выходной сигнал первого усилителя 14 поступает на вход третьего корректирующего фильтра 15. Передаточная функция третьего корректирующего фильтра 15 имеет вид  , где Tkz3 - малая постоянная времени третьего корректирующего фильтра 15, сигнал с выхода третьего корректирующего фильтра 15 поступает на второй вход первого сумматора 6, что обеспечивает совмещение визирной оси координатора 13 и направления на объект слежения по каналу наружной рамки 1. Сигнал со второго выхода координатора 13 поступает на вход второго усилителя 16 с коэффициентом усиления Ky4, выходной сигнал второго усилителя 16 поступает на вход четвертого корректирующего фильтра 17. Передаточная функция четвертого корректирующего фильтра 17 имеет вид
, где Tkz3 - малая постоянная времени третьего корректирующего фильтра 15, сигнал с выхода третьего корректирующего фильтра 15 поступает на второй вход первого сумматора 6, что обеспечивает совмещение визирной оси координатора 13 и направления на объект слежения по каналу наружной рамки 1. Сигнал со второго выхода координатора 13 поступает на вход второго усилителя 16 с коэффициентом усиления Ky4, выходной сигнал второго усилителя 16 поступает на вход четвертого корректирующего фильтра 17. Передаточная функция четвертого корректирующего фильтра 17 имеет вид  , где Tkz4 - малая постоянная времени четвертого корректирующего фильтра 17, сигнал с выхода четвертого корректирующего фильтра 17 поступает на второй вход второго сумматора 11, что обеспечивает совмещение визирной оси координатора 13 и направления на объект слежения по каналу платформы 2. Сигнал Uϕy с выхода первого датчика угла 18 пропорционален углу поворота ϕy наружной рамки 1 относительно корпуса летательного аппарата. Сигнал
, где Tkz4 - малая постоянная времени четвертого корректирующего фильтра 17, сигнал с выхода четвертого корректирующего фильтра 17 поступает на второй вход второго сумматора 11, что обеспечивает совмещение визирной оси координатора 13 и направления на объект слежения по каналу платформы 2. Сигнал Uϕy с выхода первого датчика угла 18 пропорционален углу поворота ϕy наружной рамки 1 относительно корпуса летательного аппарата. Сигнал  с выхода второго датчика угла 19 пропорционален углу поворота ϕz платформы 2 относительно наружной рамки 1. Эти сигналы определяют положение системы координат, связанной с координатором 13 относительно системы координат, связанной с летательным аппаратом. Передаточная функция двухосного индикаторного гиростабилизатора при замкнутом контуре стабилизации и замкнутом контуре автосопровождения, как отношение погрешности автосопровождения к угловой скорости объекта слежения по каналу наружной рамки 1 прототипа имеет вид:
с выхода второго датчика угла 19 пропорционален углу поворота ϕz платформы 2 относительно наружной рамки 1. Эти сигналы определяют положение системы координат, связанной с координатором 13 относительно системы координат, связанной с летательным аппаратом. Передаточная функция двухосного индикаторного гиростабилизатора при замкнутом контуре стабилизации и замкнутом контуре автосопровождения, как отношение погрешности автосопровождения к угловой скорости объекта слежения по каналу наружной рамки 1 прототипа имеет вид:



Здесь Jα - приведенный момент инерции двухосного индикаторного гиростабилизатора относительно оси наружной рамки 1, Кдус1 - коэффициент передачи первого волоконно-оптического датчика угловой скорости 7, Kdy1 - коэффициент передачи координатора 13 по каналу наружной рамки 1, Ку3 - коэффициент передачи первого усилителя 14, Kas=Кdy1Кy3 - коэффициент передачи по контуру автосопровождения по каналу наружной рамки 1, Tds1 - электромагнитная постоянная времени первого датчика момента 3; Кds1, - коэффициент передачи первого датчика момента 3; Ку1 - коэффициент передачи первого усилителя мощности 4, b1 - удельный момент сил скоростного трения относительно оси наружной рамки 1,  - угловая скорость объекта слежения по каналу наружной рамки 1.
- угловая скорость объекта слежения по каналу наружной рамки 1.
Передаточная функция предлагаемого двухосного индикаторного гиростабилизатора при замкнутом контуре стабилизации и замкнутом контуре автосопровождения, как отношение погрешности автосопровождения к угловой скорости объекта слежения по каналу наружной рамки 1 имеет вид:


Переходный процесс при включении контура автосопровождения, как реакция на ступенчатое воздействие с амплитудой 0,5 рад/с, прототипа с параметрами: Jα=2,4кгм2, b1=3Нмс, Tds1=0,00057 с, Kas=50 В/рад, Tkz1=0,01 с, KdysKds1Ky1=1670Нмс/рад (кривая 1) и предлагаемого двухосного индикаторного гиростабилизатора с параметрами: Jα=2,4кгм2, b1=3Нмс, Tds1=0,00057 с, Kas=50 В/рад, Тkz1=0,01 с, KdysKds1Ky1=1670Нмс/рад, Tkz3=0,02 с (кривая 2) изображены на фиг. 2. Из графика переходного процесса изменения момента датчика момента 3 канала наружной рамки 1 (фиг. 3) при включении контура автосопровождения, как реакция на ступенчатое воздействие с амплитудой 0,5 рад/с видно, что для обеспечения процесса автосопровождения с характеристиками переходного процесса, соответствующими фиг. 2, необходимо обеспечить максимальное значение момента относительно оси наружной рамки 1 прототипа 72Нм (кривая 1), а у предлагаемого двухосного индикаторного гиростабилизатора 39Нм (кривая 2), что реализовать технически затруднительно ввиду недопустимого увеличения массы датчиков момента 3 и 8, габаритов и энергопотребления двухосного индикаторного гиростабилизатора. Реальная статическая характеристика датчика момента 3 представляет собой линейную зависимость с зоной насыщения. Зона насыщения соответствует максимальной величине момента, развиваемого датчиком момента 3. Рассмотрим динамику двухосного индикаторного гиростабилизатора по каналу наружной рамки 1 в совмещенном режиме стабилизации и автосопровождения с учетом нелинейностей, обусловленных ограничением по уровню развиваемого момента датчиком момента 3 на уровне 24Нм. Нелинейность датчика момента 3 ограничивает допустимый диапазон угловых скоростей автосопровождения. Устойчивый переходный процесс и ожидаемая форма переходного процесса в контуре автосопровождения при замкнутом контуре стабилизации обеспечивается в допустимом диапазоне скоростей автосопровождения, при котором развиваемый датчиком момента 3 момент не превышает величины линейной зоны характеристики датчика момента 3. Если развиваемый датчиком момента 3 момент находится в зоне насыщения, возникает эффект потери устойчивости и перегрев датчика момента 3. На фиг. 4 изображен график погрешности автосопровождения прототипа по каналу наружной рамки 1 при угловой скорости  когда в переходном процессе значение момента датчика момента 3 превышает линейную зону статической характеристики датчика момента 3. На фиг. 5 изображен график изменения момента по каналу наружной рамки 1 прототипа при угловой скорости
когда в переходном процессе значение момента датчика момента 3 превышает линейную зону статической характеристики датчика момента 3. На фиг. 5 изображен график изменения момента по каналу наружной рамки 1 прототипа при угловой скорости  когда в переходном процессе значение момента датчика момента 3 превышает линейную зону статической характеристики датчика момента 3. Процесс на фиг. 3 является неустойчивым. Введение дополнительного корректирующего звена
когда в переходном процессе значение момента датчика момента 3 превышает линейную зону статической характеристики датчика момента 3. Процесс на фиг. 3 является неустойчивым. Введение дополнительного корректирующего звена  с малой постоянной времени Tkz = 0,02c в 1,8 раза уменьшает амплитуду момента, развиваемого датчиком
с малой постоянной времени Tkz = 0,02c в 1,8 раза уменьшает амплитуду момента, развиваемого датчиком
момента 3 во время переходного процесса при включении контура автосопровождения по сравнению с амплитудой переходного процесса прототипа (фиг. 2). Соответственно в 1,8 раза у предлагаемого двухосного индикаторного гиростабилизатора увеличивается максимальное значение допустимой угловой скорости автосопровождения по каналу наружной рамки 1. На фиг. 6 изображен график изменения момента предлагаемого двухосного индикаторного гиростабилизатора по каналу наружной рамки 1 при  а на фиг. 7 погрешность автосопровождения при
а на фиг. 7 погрешность автосопровождения при  Значение
Значение  в этом случае является максимально допустимым, так как при увеличении значения момент датчика момента 3 входит в зону насыщения. На фиг. 8 изображен график изменения момента прототипа по каналу наружной рамки 1 при
в этом случае является максимально допустимым, так как при увеличении значения момент датчика момента 3 входит в зону насыщения. На фиг. 8 изображен график изменения момента прототипа по каналу наружной рамки 1 при  а на фиг. 9 погрешность автосопровождения при
а на фиг. 9 погрешность автосопровождения при  Значение
Значение  для прототипа является максимально допустимым, так как при увеличении значения
для прототипа является максимально допустимым, так как при увеличении значения  момент датчика момента 3 входит в зону насыщения. Аналогичные процессы происходят по каналу платформы 2.
момент датчика момента 3 входит в зону насыщения. Аналогичные процессы происходят по каналу платформы 2.
Таким образом, применение в контуре автосопровождения корректирующих фильтров  по каналу наружной рамки 1 и
по каналу наружной рамки 1 и  по каналу платформы 2 позволяет увеличить диапазон допустимых угловых скоростей автосопровождения объекта слежения по каналам наружной рамки 1 и платформы 2.
по каналу платформы 2 позволяет увеличить диапазон допустимых угловых скоростей автосопровождения объекта слежения по каналам наружной рамки 1 и платформы 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухосный индикаторный гиростабилизатор | 2021 |
|
RU2767715C1 |
| Двухосный индикаторный гиростабилизатор | 2022 |
|
RU2793844C1 |
| Двухосный индикаторный гиростабилизатор | 2021 |
|
RU2764744C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| ДВУХОСНЫЙ УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗАТОР | 2005 |
|
RU2293949C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ СИГНАЛОВ ПЕЛЕНГОВАНИЯ ОБЪЕКТА ВИЗИРОВАНИЯ ИНЕРЦИАЛЬНОГО И РАДИОЛОКАЦИОННОГО ДИСКРИМИНАТОРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488137C2 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| Двухосная стабилизация изображения на подвижном основании без ограничения углов прокачки | 2023 |
|
RU2833345C1 |




Изобретение относится к гироскопической технике, а более конкретно к двухосным индикаторным гиростабилизаторам на волоконно-оптических датчиках угловой скорости, работающим на пилотируемых и беспилотных летательных аппаратах. Двухосный индикаторный гиростабилизатор содержит наружную рамку, установленную на основании летательного аппарата, и расположенную в ней платформу, вращающуюся относительно оси, которая перпендикулярна оси вращения наружной рамки и параллельна поперечной оси летательного аппарата, усилители мощности, два корректирующих фильтра, сумматоры, волоконно-оптические датчики угловой скорости, датчики момента, координатор, первый и второй усилители. При этом дополнительно в данный гиростабилизатор введены третий корректирующий фильтр, вход которого соединен с выходом первого усилителя, а выход - со вторым входом первого сумматора, и четвертый корректирующий фильтр, вход которого соединен с выходом второго усилителя, а выход - со вторым входом второго сумматора. Технический результат – повышение точности двухосного индикаторного гиростабилизатора. 9 ил.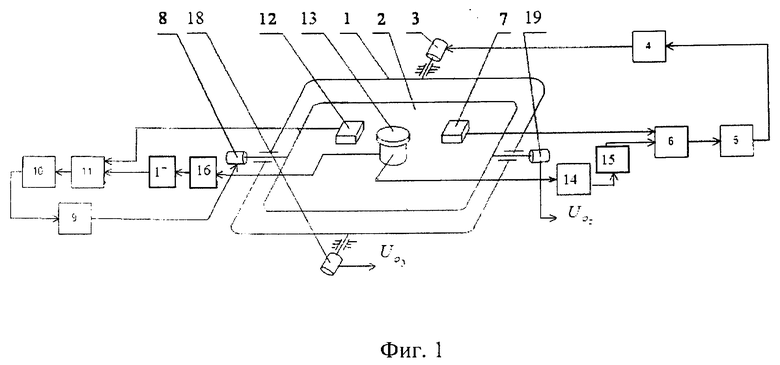
Двухосный индикаторный гиростабилизатор, содержащий наружную рамку, установленную на основании летательного аппарата с вращением относительно оси параллельной нормальной оси летательного аппарата, и расположенную в ней платформу, вращающуюся относительно оси, которая перпендикулярна оси вращения наружной рамки и параллельна поперечной оси летательного аппарата, первый датчик момента, установленный на оси вращения наружной рамки, первый усилитель мощности, выход которого соединен с входом первого датчика момента, первый корректирующий фильтр, выход которого соединен с входом первого усилителя мощности, первый сумматор, выход которого соединен с входом первого корректирующего фильтра, первый волоконно-оптический датчик угловой скорости, установленный на платформе с осью чувствительности параллельной оси вращения наружной рамки, выход которого соединен с первым входом первого сумматора, второй датчик момента, установленный на оси платформы, второй усилитель мощности, выход которого соединен с входом второго датчика момента, второй корректирующий фильтр, выход которого соединен с входом второго усилителя мощности, второй сумматор, выход которого соединен с входом второго корректирующего фильтра, второй волоконно-оптический датчик угловой скорости, установленный на платформе с осью чувствительности параллельной оси вращения платформы, выход которого соединен с первым входом второго сумматора, координатор, установленный на платформе так, что его визирная ось перпендикулярна плоскости платформы, первый усилитель, вход которого соединен с первым выходом координатора, второй усилитель, вход которого соединен со вторым выходом координатора, первый датчик угла, установленный на оси наружной рамки двухосного индикаторного гиростабилизатора, второй датчик угла, установленный на оси платформы двухосного индикаторного гиростабилизатора, отличающийся тем, что в него дополнительно введены третий корректирующий фильтр и четвертый корректирующий фильтр, причем выход первого усилителя соединен с входом третьего корректирующего фильтра, выход третьего корректирующего фильтра соединен со вторым входом первого сумматора, выход второго усилителя соединен с входом четвертого корректирующего фильтра, выход четвертого корректирующего фильтра соединен со вторым входом второго сумматора.
| Машина для изготовления штукованных заготовок переплетных крышек | 1959 |
|
SU122477A1 |
| Гладильная машина | 1958 |
|
SU120491A1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |

