Изобретение относится к измерительной технике и может быть использовано для морских, воздушных и наземных объектов. Задачей изобретения является уменьшение требований к вычислительной мощности бортовой ЭВМ резервной гировертикали путем создания способа ее непрерывной коррекции по выходным сигналам датчиков линейных ускорений (ДЛУ).
В бесплатформенной гировертикали углы крена и тангажа вычисляются по информации от датчиков угловых скоростей, как угловые отклонения от осей опорной системы координат, которая определяется перед взлетом.
Основным недостатком бесплатформенных систем является накопление ошибок с течением времени, поэтому большое внимание уделяется точности используемых гироскопов. Данный недостаток устраняется путем коррекции угловой ориентации по показаниям акселерометров, которая обеспечивает устранение эффекта накопления погрешностей. Коррекция осуществляется в установившихся режимах полета. При этом снижается влияние динамики ЛА на точность определения углов. Такой способ коррекции называется маятниковым. Привлекательность маятниковой коррекции заключается в простоте, а также в исключении необходимости учитывать форму Земли, ее угловую скорость и местоположение ЛА. Актуальной является разработка способов выделения гравитационных составляющих из ускорений, измеряемых акселерометрами в полете.
Известен способ коррекции инерциальной навигационной системы (ИНС), Патент RU 2345326, G01C 21/06, опубл. 27.01.2009. Бюл. №3.
Сущность способа заключается в следующем. По показаниям акселерометров, входящих в состав ИНС, определяют абсолютное ускорение, действующее на объект, на котором установлена ИНС, по формуле:

где gx - показания акселерометра, измеряющего ускорение по продольной оси объекта, на котором установлена ИНС; gy - показания акселерометра, измеряющего ускорение по вертикальной оси; gz - показания акселерометра, измеряющего ускорение по поперечной оси объекта, на котором установлена ИНС. В момент времени, когда абсолютное ускорение, равно ускорению силы тяжести |а|=g для местности, где находится ИНС, производится коррекция ИНС по углам тангажа и крена. Этот момент времени соответствует равномерному прямолинейному установившемуся движению объекта с постоянной скоростью. Для коррекции ИНС по формуле υ=-arcsin (gx/g) находится истинное значение угла тангажа, а по формуле γ=-arctg(gz/gy) находится истинное значение угла крена. Далее показания ИНС по углам тангажа и крена заменяются на вычисленные.
Недостаток заключается в том, что при маневрировании ЛА моменты времени, когда оценки крена и тангажа обладают достаточной точностью, могут возникать недопустимо редко. Это может привести к возникновению значительных погрешностей в результате действия постоянных или медленно меняющихся ускорений во всем диапазоне условий полета.
Известен Способ коррекции бесплатформенной инерциальной навигационной системы (БИНС), описанный в патенте RU 2564380, МПК G01C 21/06, опубликованный 27.09.2015 г. в бюллетене №27, принятый нами за прототип.
В известном способе на основании сигналов, поступающих с акселерометров, входящих в состав ИНС, определяют модуль абсолютного ускорения, действующего на объект, на котором установлена ИНС, используют сигналы, соответствующие угловой скорости объекта и оценивают сигнал, соответствующий земной скорости, осуществляют комплексирование этих сигналов и преобразованных сигналов, соответствующих линейным ускорениям с учетом параметров полета объекта, а адаптивную оценку крена и тангажа осуществляют посредством фильтра Калмана, в котором коэффициент усиления изменяется в зависимости от текущих значений модулей перегрузки и линейной скорости, а также от угловых скоростей.
Недостаток известного способа заключается в том, что для рекуррентного оценивания углов крена и тангажа при помощи фильтра Калмана требуется достаточно мощный резервный бортовой вычислитель.
Целью заявляемого изобретения является непрерывное обеспечение летательного аппарата углами крена и тангажа в резервном режиме с требуемой точностью и уменьшение требований к мощности резервного бортового вычислителя.
Поставленная цель достигается за счет того, что в способе автономной коррекции гировертикали, при котором используют сигналы, поступающие с датчиков угловых скоростей и датчиков линейных ускорений, определяют модуль перегрузки, осуществляют комплексирование и преобразованных этих сигналов, дополнительно определяют модуль вектора трех угловых скоростей, интегрируют уравнения фильтра низких частот (ФНЧ) модуля угловой скорости, осуществляют переключение постоянных времени апериодических звеньев для оценок крена и тангажа в зависимости от величины фильтрованного модуля скорости вращения, определяют оценку крена соответствующую производной крена по уравнению Эйлера, с учетом текущих оценок крена и тангажа, определяют сигнал обратной связи для крена  и входной сигнал интегратора крена
и входной сигнал интегратора крена  постоянную времени Тγ назначают из условий Tγ=T1 при |ω|ƒ<Por(ω) или Тγ=Т2 при |ω|ƒ≥Por(ω), определяют величину выходного сигнала интегратора
постоянную времени Тγ назначают из условий Tγ=T1 при |ω|ƒ<Por(ω) или Тγ=Т2 при |ω|ƒ≥Por(ω), определяют величину выходного сигнала интегратора  которая и является оценкой крена, определяют тангаж, соответствующую производной тангажа по уравнению Эйлера, с учетом текущей оценки крена, определяют сигнал обратной связи
которая и является оценкой крена, определяют тангаж, соответствующую производной тангажа по уравнению Эйлера, с учетом текущей оценки крена, определяют сигнал обратной связи  и входной сигнал интегратора тангажа
и входной сигнал интегратора тангажа  постоянную времени для оценивания тангажа определяют путем трехкратного увеличения назначенной постоянной времени угла крена Тϑ=3Тγ, определяют величину выходного сигнала интегратора
постоянную времени для оценивания тангажа определяют путем трехкратного увеличения назначенной постоянной времени угла крена Тϑ=3Тγ, определяют величину выходного сигнала интегратора  где
где  значения углов крена и тангажа на предыдущем шаге, далее осуществляют интегрирование уравнений отклонения модуля перегрузки от единицы, корректируют оценку тангажа
значения углов крена и тангажа на предыдущем шаге, далее осуществляют интегрирование уравнений отклонения модуля перегрузки от единицы, корректируют оценку тангажа  с учетом статической оценки ϑst при условии того, что отклонение модуля перегрузки от единицы меньше порогового значения
с учетом статической оценки ϑst при условии того, что отклонение модуля перегрузки от единицы меньше порогового значения  корректируют оценку крена
корректируют оценку крена  с учетом статической оценки γst при условии того, что отклонение модуля перегрузки от единицы меньше порогового значения
с учетом статической оценки γst при условии того, что отклонение модуля перегрузки от единицы меньше порогового значения  где ϑst=sin(nx) - статическая оценка тангажа; где k1ϑ - весовой коэффициент статической оценки тангажа; k2ϑ=1-k1ϑ - весовой коэффициент оценки тангажа, γst=-Arctg(nz/ny) - статическая оценка крена; k1γ - весовой коэффициент статической оценки крена; k2γ=1-k1γ - весовой коэффициент оценки крена. Скорректированные величины крена
где ϑst=sin(nx) - статическая оценка тангажа; где k1ϑ - весовой коэффициент статической оценки тангажа; k2ϑ=1-k1ϑ - весовой коэффициент оценки тангажа, γst=-Arctg(nz/ny) - статическая оценка крена; k1γ - весовой коэффициент статической оценки крена; k2γ=1-k1γ - весовой коэффициент оценки крена. Скорректированные величины крена  и тангажа
и тангажа  используют на следующем шаге при интегрировании сигналов от ДУС и ДЛУ в уравнениях Эйлера и следующей коррекции.
используют на следующем шаге при интегрировании сигналов от ДУС и ДЛУ в уравнениях Эйлера и следующей коррекции.
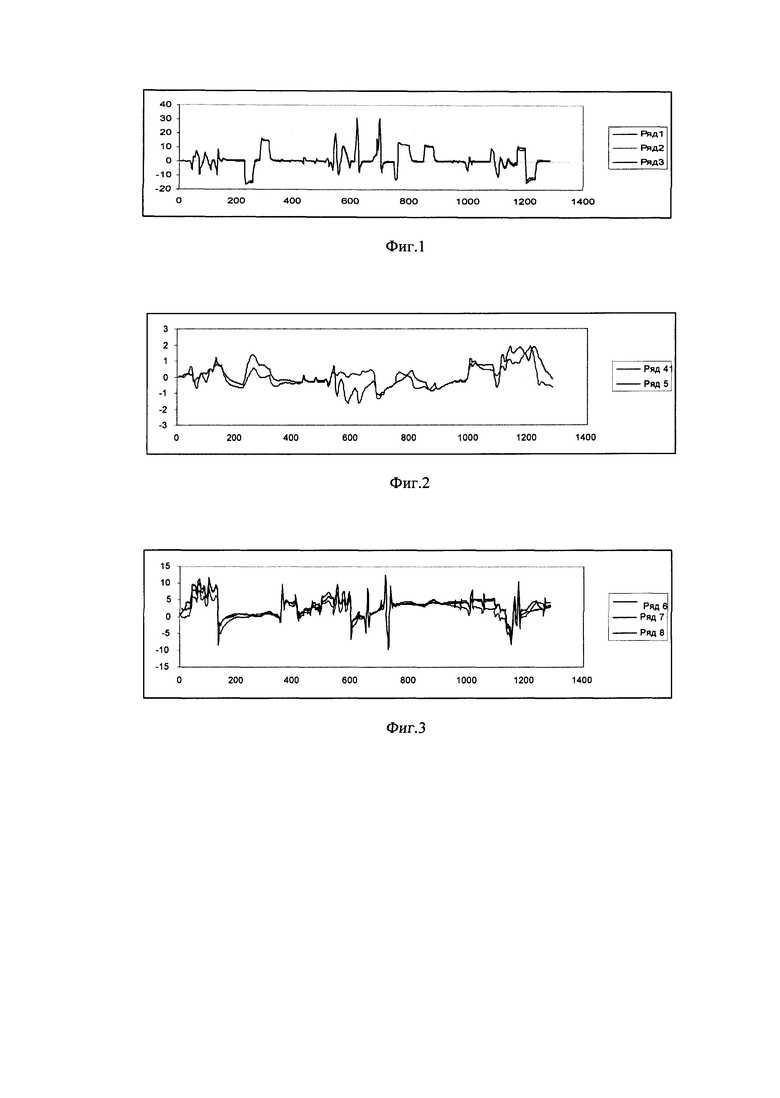
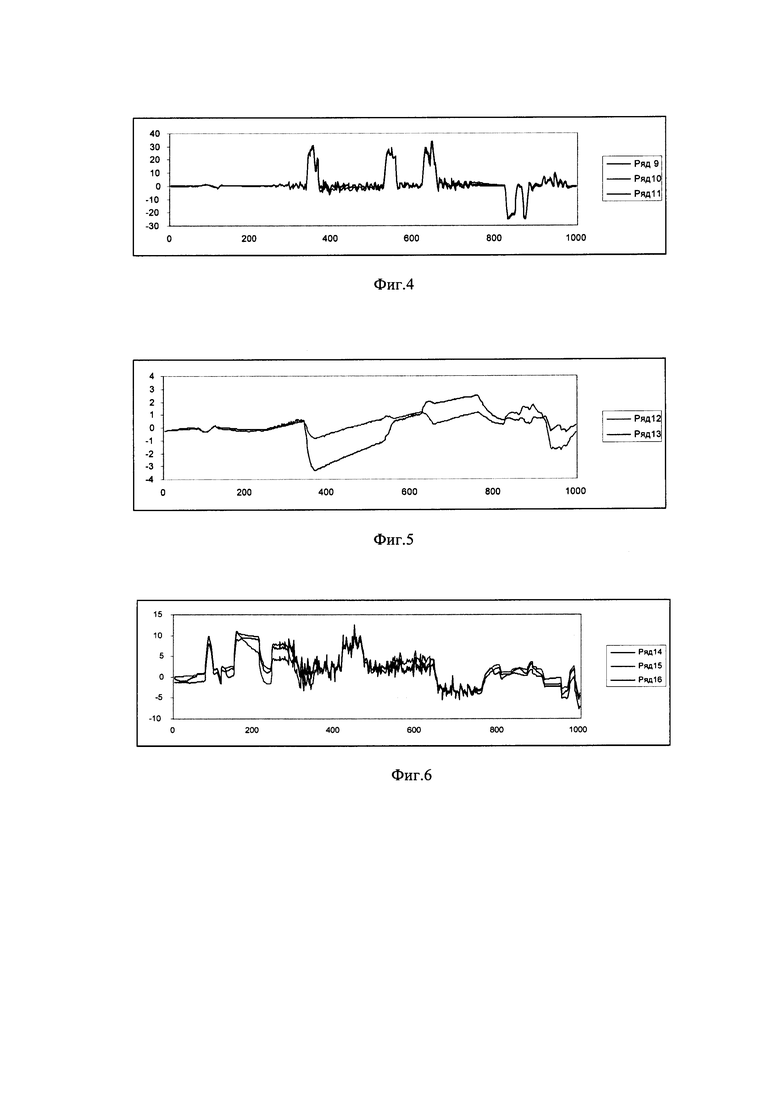
Результаты исследований работы предлагаемого изобретения подтверждаются графиками, где на фиг. 1 показаны: ряд 1 - крен; ряд 2 - оценка крена без коррекции; ряд 3 - оценка крена с коррекцией. На фиг. 2 представлены: ряд 4 - погрешность оценки крена без коррекции; ряд 5 - погрешность оценки крена с коррекцией. На фиг. 3 представлены: ряд 6 - тангаж; ряд 7 - оценка тангажа без коррекции; ряд 8 -оценка тангажа с коррекцией. На фиг. 4 - фиг. 6 представлены результаты определения углов при полете в турбулентной атмосфере. На фиг. 4: ряд 9 - крен; ряд 10 - оценка крена без коррекции; ряд 11 - оценка крена с коррекцией. На фиг. 5: ряд 12 - погрешность оценки крена без коррекции; ряд 13 - погрешность оценки крена с коррекцией. На фиг. 6: ряд 14 - тангаж; ряд 15 - оценка тангажа без коррекции; ряд 16 - оценка тангажа с коррекцией.
Суть работы способа излагается ниже.
Алгоритм предназначен для непрерывного режима работы и представляется бесконечным циклом по квантам времени Δt в соответствии с принятой частотой регистрации датчиков.
Описание алгоритма приводится по шагам для одного Δt.
Шаг 1. По измерениям ДУС ωх, ωу, ωz определяют модуль угловой скорости:

Шаг 2. Интегрируют уравнения ФНЧ для модуля угловой скорости. Фильтр необходим для защиты от шумов и бросков измерений угловых скоростей:
|ω|ƒ=w2ƒ фильтрованный модуль угловой скорости;
Начальные условия ФНЧ для первого отсчета измерений - нулевые: w1ƒ=0, w2ƒ=0; Т - постоянная времени ФНЧ.
Шаг 3. Переключают постоянные времени апериодических звеньев для оценок крена и тангажа в зависимости от величины фильтрованного модуля скорости вращения.
Por(ω) - порог фильтрованного модуля угловой скорости;
Тγ - постоянная времени апериодического звена для оценивания крена;
Тγ=T1 при |ω|ƒ<Por(ω); Тγ=Т2 при |ω|ƒ≥Por(ω),
Тϑ=3Тγ - постоянная времени апериодического звена для оценивания тангажа.
Шаг 4. Определяют оценку крена 
 - входной сигнал схемы крена, соответствует производной крена по уравнению Эйлера с учетом текущих оценок крена и тангажа,
- входной сигнал схемы крена, соответствует производной крена по уравнению Эйлера с учетом текущих оценок крена и тангажа,
 - сигнал обратной связи для крена;
- сигнал обратной связи для крена;
 - входной сигнал интегратора крена;
- входной сигнал интегратора крена;
 - выходной сигнал интегратора, который и является оценкой крена;
- выходной сигнал интегратора, который и является оценкой крена;
Начальное условие оценки крена для первого Δt - нулевое 
Шаг 5. Определяют оценки тангажа 
 - входной сигнал схемы тангажа, соответствует производной тангажа по уравнению Эйлера с учетом текущей оценки крена;
- входной сигнал схемы тангажа, соответствует производной тангажа по уравнению Эйлера с учетом текущей оценки крена;
 - сигнал обратной связи;
- сигнал обратной связи;
 - входной сигнал интегратора тангажа;
- входной сигнал интегратора тангажа;
 - выходной сигнал интегратора - оценка тангажа.
- выходной сигнал интегратора - оценка тангажа.
Начальное условие оценки тангажа для первого Δt - нулевое 
Шаг 6. Определяют модуль перегрузки:
Шаг 7. Интегрируют уравнения ФНЧ отклонения модуля перегрузки от единицы, Фильтр необходим для защиты от шумов и бросков измерений линейных ускорений.
 - фильтрованное отклонение модуля перегрузки от единицы.
- фильтрованное отклонение модуля перегрузки от единицы.
Начальные условия ФНЧ для первого отсчета измерений: n1ƒ=0, n2ƒ=0;
Т - постоянная времени ФНЧ.
Шаг 8. Корректируют оценку тангажа:
Porn - порог отклонения фильтрованного модуля тангажа от единицы;
ϑst=sin(nx) - статическая оценка тангажа;
k1ϑ=0.001 - весовой коэффициент статической оценки тангажа;
k2ϑ=1-k1ϑ - весовой коэффициент оценки тангажа;
 - коррекция оценки тангажа
- коррекция оценки тангажа  с учетом статической оценки ϑst при условии того, что фильтрованное отклонение модуля перегрузки от единицы меньше порогового значения:
с учетом статической оценки ϑst при условии того, что фильтрованное отклонение модуля перегрузки от единицы меньше порогового значения: 
Шаг 9. Корректируют оценку крена:
γst=-Arctg(nz/ny) - статическая оценка крена.
k1γ=0.001/3 - весовой коэффициент статической оценки крена - меньше в 3 раза коэффициента k1ϑ.
k2γ=1-k1γ - весовой коэффициент оценки крена.
 - коррекция оценки крена
- коррекция оценки крена  с учетом статистической оценки γst при условии того, что фильтрованное отклонение модуля прегрузки от единицы меньше порогового значения:
с учетом статистической оценки γst при условии того, что фильтрованное отклонение модуля прегрузки от единицы меньше порогового значения: 
Результаты моделирования представлены в иллюстрациях. Фиг. 1-3 - графики полета в спокойной атмосфере. Фиг. 4-6 - графики полета в турбулентной атмосфере. При этом погрешности датчиков принимались согласно приведенным ниже значениям:
0.01 град/с - смещения нулей ДУС, 0.1 град/с - СКО шумов ДУС,
0.001 g - смещения нулей ДЛУ, 0.01 g - СКО шумов ДЛУ.
Таким образом, по данным моделирования на авиасимуляторе и при указанных погрешностях датчиков предлагаемый способ обеспечивает СКО погрешностей до уровня 0.5 градуса по крену и 0.6 градуса по тангажу при нулевом значении математических ожиданий крена и тангажа в спокойной атмосфере. В турбулентной атмосфере СКО погрешностей составляет 0.7 градуса по крену и 0.8 градуса по тангажу. При этом смещение оценок крена и тангажа имеет порядок 0.2 и 0.3 градуса соответственно.
Техническим результатом использования изобретения является уменьшение требований к вычислительной мощности для резервной гировертикали и непрерывное получение значений углов, удовлетворяющих требованиям точности к резервной системе определения углов крена и тангажа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции гировертикали по углу атаки | 2022 |
|
RU2790548C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2646954C2 |
| СИСТЕМА ФОРМИРОВАНИЯ РЕЗЕРВНОЙ ИНФОРМАЦИИ О ПРОСТРАНСТВЕННОМ ПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2324623C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
Изобретение относится к измерительной технике и может быть использовано для морских и воздушных объектов. Способ автономной коррекции гировертикали заключается в том, что используют только выходные сигналы датчиков ДУС и датчиков ДЛУ, затем определяют модуль угловой скорости и осуществляют интегрирование уравнений фильтра низких частот модуля угловой скорости, переключение постоянных времени апериодических звеньев для оценок крена и тангажа в зависимости от величины фильтрованного модуля скорости вращения. Затем вычисляют оценку крена, соответствующую производной крена по уравнению Эйлера с учетом текущих оценок крена и тангажа. Оценку тангажа корректируют с учетом статической оценки тангажа при условии, что фильтрованное отклонение модуля перегрузки от единицы меньше порогового значения. Оценку крена корректируют с учетом статической оценки при условии, что фильтрованное отклонение модуля перегрузки от единицы меньше порогового значения. Технический результат – обеспечение возможности непрерывного получения значений углов, удовлетворяющих требованиям точности к резервной системе определения углов крена и тангажа. 6 ил.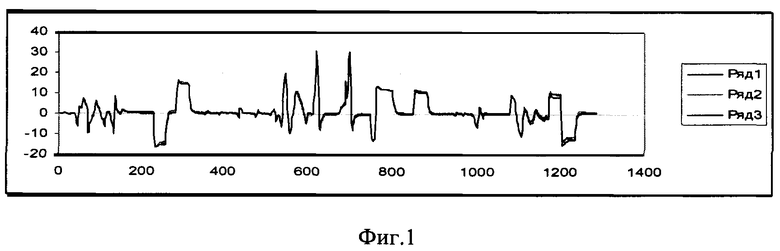
Способ автономной коррекции гировертикали, при котором используют сигналы, поступающие с датчиков угловых скоростей и датчиков линейных ускорений, определяют модуль перегрузки, осуществляют комплексирование и преобразование этих сигналов, отличающийся тем, что дополнительно определяют модуль вектора трех угловых скоростей, интегрируют уравнения фильтра низких частот (ФНЧ) модуля угловой скорости, осуществляют переключение постоянных времени апериодических звеньев для оценок крена и тангажа в зависимости от величины фильтрованного модуля скорости вращения, определяют крен, соответствующий производной крена по уравнению Эйлера, с учетом текущих оценок крена и тангажа, определяют сигнал обратной связи для крена  и входной сигнал интегратора крена
и входной сигнал интегратора крена  постоянную времени Тγ назначают из условий Тγ=Т1 при |ω|ƒ<Por(ω) или Тγ=Т2 при |ω|ƒ≥Por(ω), определяют величину выходного сигнала интегратора
постоянную времени Тγ назначают из условий Тγ=Т1 при |ω|ƒ<Por(ω) или Тγ=Т2 при |ω|ƒ≥Por(ω), определяют величину выходного сигнала интегратора  которая и является оценкой крена, определяют тангаж, соответствующий производной тангажа по уравнению Эйлера, с учетом текущей оценки крена, определяют сигнал обратной связи
которая и является оценкой крена, определяют тангаж, соответствующий производной тангажа по уравнению Эйлера, с учетом текущей оценки крена, определяют сигнал обратной связи  и входной сигнал интегратора тангажа
и входной сигнал интегратора тангажа  постоянную времени для оценивания тангажа определяют путем трехкратного увеличения назначенной постоянной времени угла крена Тϑ=3Тγ, определяют величину выходного сигнала интегратора
постоянную времени для оценивания тангажа определяют путем трехкратного увеличения назначенной постоянной времени угла крена Тϑ=3Тγ, определяют величину выходного сигнала интегратора  где
где  - значения углов крена и тангажа на предыдущем шаге, далее осуществляют интегрирование уравнений отклонения модуля перегрузки от единицы, корректируют оценку тангажа
- значения углов крена и тангажа на предыдущем шаге, далее осуществляют интегрирование уравнений отклонения модуля перегрузки от единицы, корректируют оценку тангажа  с учетом статической оценки ϑst при условии того, что отклонение модуля перегрузки от единицы меньше порогового значения
с учетом статической оценки ϑst при условии того, что отклонение модуля перегрузки от единицы меньше порогового значения  корректируют оценку крена
корректируют оценку крена  с учетом статической оценки γst при условии того, что отклонение модуля перегрузки от единицы меньше порогового значения
с учетом статической оценки γst при условии того, что отклонение модуля перегрузки от единицы меньше порогового значения  где ϑst=sin(nx) - статическая оценка тангажа; где k1ϑ - весовой коэффициент статической оценки тангажа; k2ϑ=1-k1ϑ - весовой коэффициент оценки тангажа, γst=-Arctg(nz/ny) - статическая оценка крена; k1γ - весовой коэффициент статической оценки крена; k2γ=1-k1γ - весовой коэффициент оценки крена, скорректированные величины крена
где ϑst=sin(nx) - статическая оценка тангажа; где k1ϑ - весовой коэффициент статической оценки тангажа; k2ϑ=1-k1ϑ - весовой коэффициент оценки тангажа, γst=-Arctg(nz/ny) - статическая оценка крена; k1γ - весовой коэффициент статической оценки крена; k2γ=1-k1γ - весовой коэффициент оценки крена, скорректированные величины крена  и тангажа
и тангажа  используют на следующем шаге при интегрировании сигналов от ДУС и ДЛУ в уравнениях Эйлера и следующей коррекции.
используют на следующем шаге при интегрировании сигналов от ДУС и ДЛУ в уравнениях Эйлера и следующей коррекции.
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| СПОСОБ ФОРМИРОВАНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ МАНЕВРЕННОГО ОБЪЕКТА | 2019 |
|
RU2713585C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| US 7430460 B2, 30.09.2008. | |||
