Изобретение относится к радиотехнике и предназначено для повышения точности определения местоположения мобильных средств по сигналам опорных станций наземной локальной радионавигационной системы (ЛРНС).
Известен дальномерный способ и устройство определения координат источника радиоизлучения [1] по данным измерений от не менее, чем трех взаимно удаленных друг от друга пунктах приема, в которых производят определение расстояний от источника радиоизлучения до каждого из пунктов приема и по полученным расстояниям вычисляют координаты местоположения источника радиоизлучения, в пассивном режиме в условиях отсутствия взаимной временной синхронизации пунктов приема в пунктах приема измеряют интенсивность сигнала в виде энергии сигнала, определяемой по максимуму отклика согласованного фильтра, а затем по величине интенсивностей сигналов вычисляют расстояния от источника радиоизлучения до каждого из пунктов приема по величине затухания сигнала на трассе распространения от источника радиоизлучения до точки приема.
Недостатком данного дальномерного способа определения координат является то, что в нем отсутствует возможность выбора оценок расстояний с наименьшими погрешностями.
Измерения расстояний сопровождаются погрешностями, приводящими к ошибкам в оценке местоположения. Погрешности могут быть обусловлены: неточностями исходных математических моделей, несовершенством методов измерений, условиями распространения радиоволн, движением мобильного средства (МС) в местности со сложным рельефом, воздействием преднамеренных и непреднамеренных помех и др. Неточности в исходных данных могут быть вызваны большим числом причин, действующих в каждом конкретном измерении различным образом. При этом в некоторых случаях погрешности могут быть достаточно велики и иметь статистически неустойчивые характеристики.
Целью изобретения является обеспечение высокой точности определения местоположения МС в условиях непредсказуемости погрешностей измеряемых расстояний с использованием предварительной обработки измеренных расстояний, обеспечивающей отсев грубых ошибок измерений. Поставленная цель достигается пространственной селекцией измеренных расстояний от МС до опорных станций ЛРНС с известными координатами и расчетом координат с использованием расстояний, измеренных с наименьшими погрешностями.
В общем случае метод определения координат можно сформулировать следующим образом. Имеются n опорных станций с известными координатами {xi, yi, i=1, 2, …, n}. Имеются n измеренных расстояний
ri=roi+vi, i=1, 2, …, n
от МС с неизвестными координатами до n опорных станций ЛРНС. Здесь roi - точное расстояние от МС до i-й опорной станции ЛРНС, vi - неизвестная погрешность измерений расстояний. Требуется определить координаты x и y мобильного средства в условиях априорной неопределенности в отношении погрешности измерений.
Для решения этой задачи рассмотрены:
- алгоритм расчета координат по измеренным расстояниям;
- способ пространственной селекции измеренных расстояний.
Алгоритм расчета координат по измеренным расстояниям
Для определения местоположения МС на плоскости необходимо знание расстояний не менее чем до 3-х опорных станций ЛРНС.
Координаты МС можно определить из системы нелинейных уравнений, связывающих искомые координаты x и y с известными координатами xi, yi, i=1, 2, …, n, расстояниями Ri, i=1, 2, …, n от МС до опорных станций ЛРНС
Для решения системы нелинейных уравнений используют итеративную процедуру, базирующуюся на разложении нелинейных уравнений в ряд Тейлора и отбрасывании нелинейных членов [2, 3]. Эта процедура требует знания начального приближения и полученное решение чувствительно к неточности в его выборе.
Рассмотрим линеаризацию системы (1), основанную на тождественных преобразованиях и позволяющую получить прямое решение.
Введем векторные обозначения  ;
;  , i=1, 2, …, n и перепишем систему нелинейных уравнений (1) в матричном виде
, i=1, 2, …, n и перепишем систему нелинейных уравнений (1) в матричном виде

Для линеаризации в каждую скобку правой части в качестве слагаемого введем нулевой вектор Р1-Р1 [3] и преобразуем систему уравнений (2) в систему из n-1 уравнений
Раскроем скобки в правой части системы уравнений (3), перегруппируем и перенесем в левую часть системы члены, содержащие неизвестный вектор Р, получим

или
Введем обозначения

Тогда вектор координат рассчитывается в виде [4]

Полученное уравнение (4) является прямым, неитеративным решением системы нелинейных уравнений (3), позволяющим рассчитывать координаты объекта по измеренным расстояниям.
Способ пространственной селекции измеренных расстояний
Сущность способа пространственной селекции поясняется следующими рисунками.
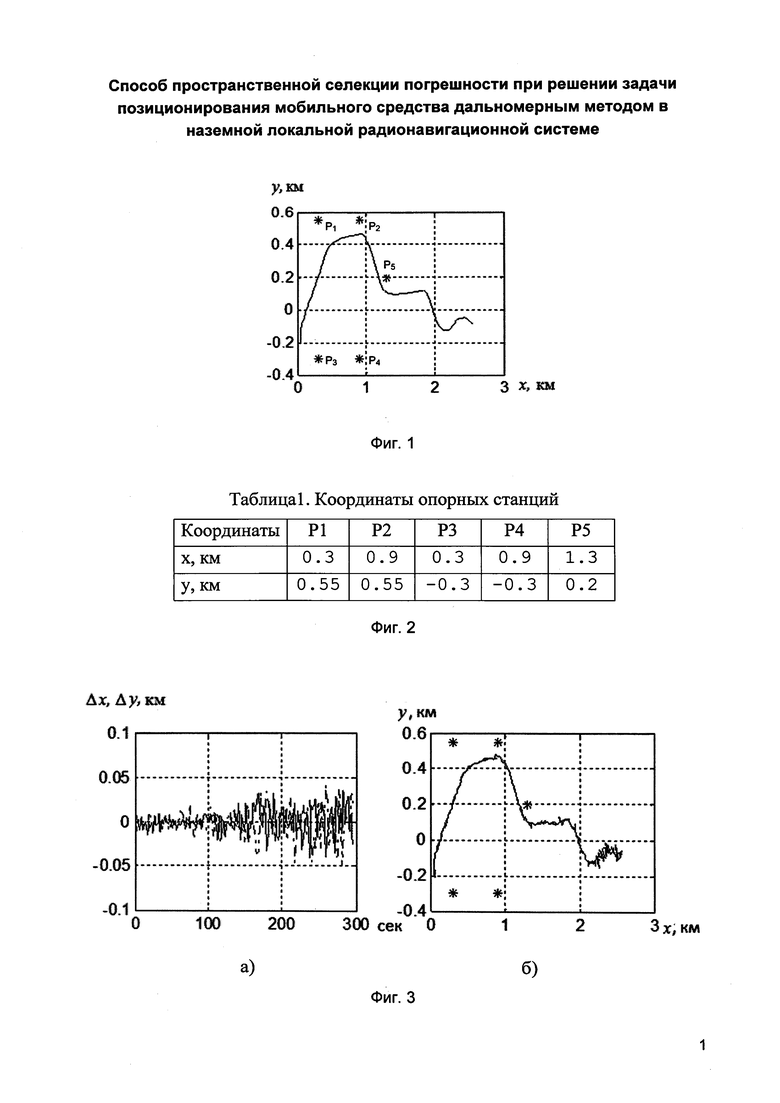
На фиг. 1 показана траектория движения МС без погрешностей, на фиг. 2 таблица координат опорных станций ЛРНС, используемых в фиг 1, на фиг. 3 показаны графики результатов расчета погрешностей и координат с погрешностями измеренных растояний, на фиг. 4 показаны графики результатов расчета погрешностей и координат с погрешностями измерений и ошибками из-за распространения радиоволн, на фиг. 5 показаны графики пространственной селекции расстояний с отбрасыванием расстояния от одной опорной станции ЛРНС, на фиг. 6 показана структурная схема алгоритма пространственной селекции расстояний.
При точно измеренных расстояниях от движущегося МС до опорных станций ЛРНС расчетная траектория движения, полученная с помощью (4), совпадает с исходной траекторией движения, приведенной на фиг. 1. Однако в реальных условиях в результате воздействия различных помех расстояния до опорных станций ЛРНС определяются с погрешностями. С одной стороны, измерения сопровождаются собственно приборными шумами, описываемыми обычно нормальным законом распределения. С другой стороны, ошибки в измерениях расстояний вызываются деструктивными влияниями распространения радиоволн, возникающими при движении МС в сильно пересеченной местности. Эти ошибки оказывают существенное влияние на точность определения местоположения МС.
На фиг. 3а приведены в виде графиков результаты расчета погрешностей координат с учетом приборных шумов измерений расстояний (Δx - сплошная линия и Δy - пунктирная линия). На фиг. 3б - траектория (координаты) движения МС с учетом погрешностей. Погрешность измерения расстояний представлена нормальным законом распределения со среднеквадратическим значением σ=10 м. Измерения расстояний проводились с интервалом времени 2 с.
В пределах времени движения менее 100 с погрешность расчета координат находится в пределах 10 м. Затем погрешность возрастает до 30-40 м. Это возрастание связано с удалением МС от опорных станций.
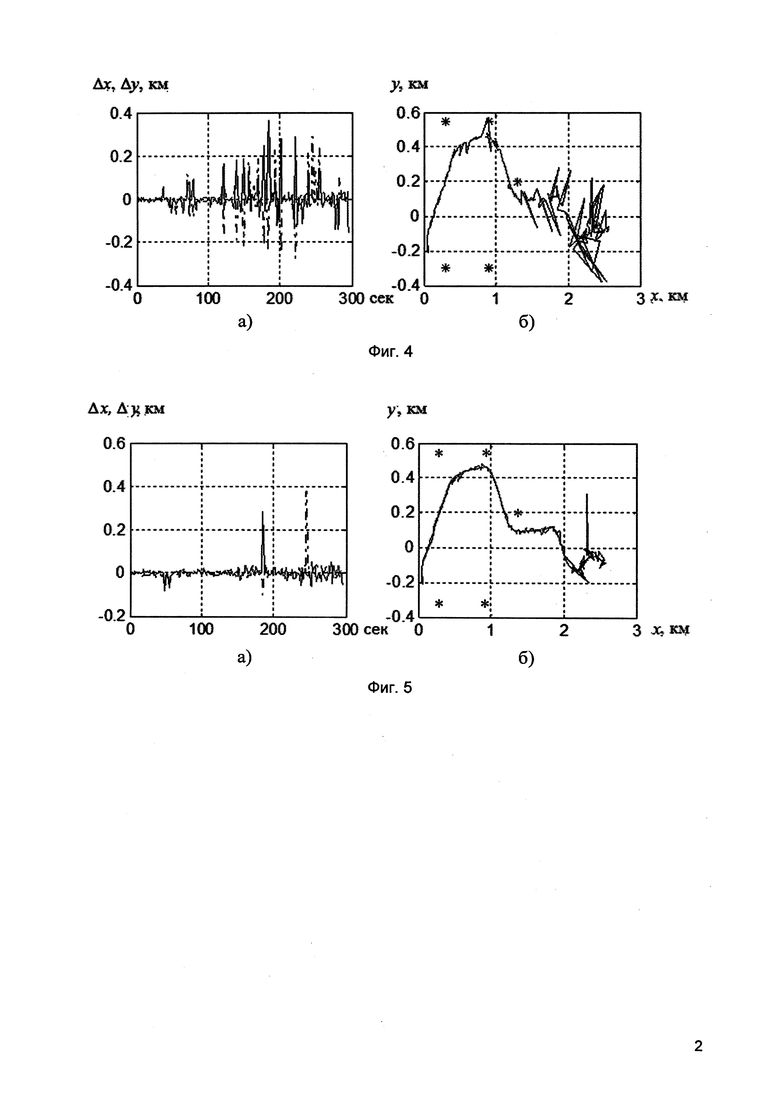
На фиг. 4а) показаны погрешности расчета координат с учетом шумов измерений и ошибками, обусловленными распространением радиоволн: Δx - сплошная линия и Δy - пунктирная линия; возрастание связано с удалением МС от опорных станций.
На фиг. 4б) приведены исходная траектория движения - пунктирная линия и рассчитанная траектория по измеренным расстояниям - сплошная линия. При этом ошибка измерений расстояний из-за распространения радиоволн распределена во времени случайно и равнялась 150 м. Погрешности расчета координат в этом случае увеличились до 400 м.
Из анализа указанных фигур следует, что рассматриваемый алгоритм расчета координат позволяет определять местоположение МС по измеренным расстояниям до опорных станций с известными координатами. При отсутствии шумов измерений предложенный алгоритм расчета координат дает хорошие результаты. Но измерение расстояний сопровождается различного рода погрешностями, приводящими зачастую к существенным ошибкам в определении местоположения МС. Поэтому необходима предварительная обработка и фильтрация данных, полученных непосредственно с навигационного приемника МС. Фильтрация должна заключатся в отсеве выбросов «плохих» измерений, которые приводят к искажениям данных и ошибкам в определении местоположения.
Способ пространственной селекции погрешности при решении задачи позиционирования мобильного средства дальномерным методом в наземной локальной радионавигационной системе осуществляется за счет исключения из процедуры расчета координат «плохих» измерений. То есть повышение точности оценки координат возможно за счет пространственной селекции опорных станций ЛРНС, измерения расстояний до которых наименее искажены погрешностями.
В каждый момент времени известны измеренные расстояния
ri=roi+vi (i=1, 2, …, n)
от опорных станций ЛРНС до МС и координаты опорной станций Pi, i=1, 2, …, n. Здесь roi - точное расстояние от МС с неизвестными координатами до i-й опорной станции с известным местоположением, vi - неизвестные погрешности измерений. В условиях априорной неопределенности в отношении погрешностей измерений vi (i=1, 2, …, n) требуется определить наибольшую из них с тем, чтобы в дальнейшем исключить из процедуры расчета координат соответствующее ей измеренное расстояние.
Поскольку погрешности неизвестны, то непосредственное определение наибольшей помехи не представляется возможным. Поэтому ниже рассмотрим подход для косвенного решения этой задачи. Он заключается в следующем. Если для каждого момента измерений найти некое преобразование

обеспечивающее оценку зашумленных компонент  вектора расстояний
вектора расстояний  по измеренному вектору R=[r1, r2 …, rn]T на основе критерия минимума ошибки, то, составив разности
по измеренному вектору R=[r1, r2 …, rn]T на основе критерия минимума ошибки, то, составив разности  , i=1, 2, …, n, можно найти наибольшую ошибку
, i=1, 2, …, n, можно найти наибольшую ошибку  , а расстояние rm с номером m исключить из процедуры расчета и рассчитать более точные координаты.
, а расстояние rm с номером m исключить из процедуры расчета и рассчитать более точные координаты.
В качестве преобразования, обеспечивающего оценку (5), используем медианный фильтр. Медианный фильтр представляет собой "скользящее окно" протяженностью K отсчетов, в котором центральный элемент заменяется медианой (т.е. средним элементом последовательности, упорядоченной в порядке возрастания значений измерений в "окне"). То есть операция медианной фильтрации К-последовательности значений расстояний ri(t1), ri(t2), …, ri(tN) характеризуется соотношением [5]

где фиксированное значение m определяет апертуру фильтра.
Предложенный способ пространственной селекции можно представить в виде структурной схемы, приведенной на фиг. 6. Она содержит:
- медианные фильтры 1i;
- блоки вычисления разностей 2i;
- блок управления селекцией 3;
- ключи 4i;
- блок расчета координат 5.
На входы этой схемы поступают отсчеты расстояний ri (i=1, 2, …, n), измеренные от МС с неизвестными координатами до опорных станций ЛРНС с известными координатами Pi, i=1, 2, …, n, которые поступают в медианные фильтры 1i, блоки вычисления разностей 2i и через ключи 4i в блок расчета координат 5.
В медианных фильтрах 1i осуществляется выделение расстояний  наименее искаженных погрешностями. Эти расстояния передаются в блоки вычисления разностей 2i, где происходит вычисления погрешностей
наименее искаженных погрешностями. Эти расстояния передаются в блоки вычисления разностей 2i, где происходит вычисления погрешностей  (i=1, 2, …, n) между исходными расстояниями и их оценкой после медианной фильтрации. Полученные погрешности передаются в блок управления селекцией 3, где вычисляются наибольшие погрешности
(i=1, 2, …, n) между исходными расстояниями и их оценкой после медианной фильтрации. Полученные погрешности передаются в блок управления селекцией 3, где вычисляются наибольшие погрешности  и формируются команды управляющие ключами 4i. Управление ключами 4i заключается в том, что определив наибольшую погрешность, например, δmi, ключ прерывает поступление расстояния rm в блок расчета координат 5, исключая расстояния rm из процедуры расчета координат.
и формируются команды управляющие ключами 4i. Управление ключами 4i заключается в том, что определив наибольшую погрешность, например, δmi, ключ прерывает поступление расстояния rm в блок расчета координат 5, исключая расстояния rm из процедуры расчета координат.
На фиг. 5 приведены результаты расчетов координат с ошибками, обусловленными распространением радиоволн, полученными при отбрасывании из расчетов расстояний, полученных от «плохих» опорных станций. Видно, что в большинстве случаев выбросы подавлены, но редкие из них все-таки остались.
Таким образом, предложен способ решения задачи позиционирования мобильного средства дальномерным методом в наземной локальной радионавигационной системе, построенный на селекции измеряемых расстояний при наличии избыточности опорных станций, позволяющий уменьшать погрешности в определении местоположения мобильных средств.
Результаты численного моделирования показали высокую эффективность оценки координат мобильных средств прямым методом расчета координат и пространственной селекцией измеренных расстояний, особенно в канале с ошибками измерений, порождаемыми многолучевостью.
Источники информации
1. Патент №2506605 РФ, МПК G01S 5/00. Дальномерный способ и устройство определения координат источника радиоизлучения / Г.П. Бендерский, Е.А. Лаврентьев, А.А. Шаталов, В.А. Шаталова, А.Б. Ястребов, С.П. Фандющенко (РФ); Открытое акционерное общество «Научно-производственное объединение «Лианозовский электромеханический завод» (РФ). - №2011153139/07; Заявлено 26.12.2011; Опубл. 10.02.2014, Бюл. 4. - 10 с.: 2 ил.
2. Глобальная спутниковая радионавигационная система ГЛОНАСС. Под ред. В.Н. Харисова, А.И. Перова, В.А. Болдина. - 2-e изд. исправ. - М.: ИПРЖР, 1999. 560 с.
3. Кононыхина Н.А., Федоров Ю.П. Эффективный алгоритм и программа определения местонахождения объектов для системы многопозиционной радионавигации // Теория и техника радиосвязи, вып. 1, Воронеж, 1997, с. 61-73.
4. W. Murphy and W. Hereman, Determination of a position in three dimensions using trilateration and approximate distances, Technical Report MCS-95-07, Department of Mathematical and Computer Sciences, Colorado School of Mines, Golden, Colorado. 1995, 21 pages.
5. Прокис Дж. Цифровая связь. Пер. с англ. / Под ред. Д.Д. Кловского. - М.: Радио и связь. 2000. - 800 c.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат и параметров движения целей в дальномерной многопозиционной радиолокационной системе | 2020 |
|
RU2759198C1 |
| ФАЗОВЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ С ПРОГРАММНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 1988 |
|
SU1840142A1 |
| Способ, реализующий точную помехоустойчивую синхронизацию опорных станций локальной навигационной системы | 2023 |
|
RU2827095C1 |
| Способ навигации с использованием абонентского терминала и абонентский терминал | 2023 |
|
RU2837647C1 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2802323C1 |
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, комплексированная с инерциальной навигационной системой, обеспечивающая высокоточное позиционирование движущихся объектов | 2023 |
|
RU2802322C1 |
| Помехоустойчивая дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2784802C1 |
| Способ определения собственного местоположения объекта в пространстве | 2023 |
|
RU2815168C1 |

Изобретение относится к радиотехнике и предназначено для повышения точности определения местоположения мобильных средств по сигналам опорных станций наземной локальной радионавигационной системы (ЛРНС). Достигаемый технический результат – повышение точности определения местоположения мобильного средства (МС). Указанный результат достигается за счет того, что способ пространственной селекции расстояний при решении задачи позиционирования МС дальномерным методом в наземной ЛРНС включает измерение расстояний ri (i=1, 2, …, n) от МС с неизвестными координатами до опорных станций ЛРНС с известными координатами Pi, i=1, 2, …, n, фильтрацию измеренных расстояний в медианных фильтрах, вычисление погрешностей между исходными расстояниями и их оценкой после фильтрации с последующей передачей полученных погрешностей в блок управления селекцией для вычисления наибольшей погрешности и формирования команды управления ключом на отключение данной линии, предотвращающее передачу оценок расстояний с наибольшими погрешностями в блок расчета координат МС. 6 ил.
Способ пространственной селекции расстояний в наземной локальной радионавигационной системе (ЛРНС) между мобильным средством (МС) и опорными станциями ЛРНС, заключающийся в том, что измеряют расстояния ri (i=1, 2, … n) от мобильного средства с неизвестными координатами до опорных станций ЛРНС с известными координатами pi (i=1, 2, … n,), отличающийся тем, что осуществляют фильтрацию измеренных расстояний в медианных фильтрах  (i=1, 2, … n), передают их в блоки вычисления разностей, осуществляющие вычисление погрешностей
(i=1, 2, … n), передают их в блоки вычисления разностей, осуществляющие вычисление погрешностей  (i=1, 2, … n) между исходными расстояниями и их оценкой после фильтрации, с последующей передачей полученных погрешностей в блок управления селекцией для вычисления наибольшей погрешности
(i=1, 2, … n) между исходными расстояниями и их оценкой после фильтрации, с последующей передачей полученных погрешностей в блок управления селекцией для вычисления наибольшей погрешности  и формированием команды управления ключом на отключение данной i-й линии, предотвращающее передачу оценок расстояний с наибольшими погрешностями в блок расчета координат МС.
и формированием команды управления ключом на отключение данной i-й линии, предотвращающее передачу оценок расстояний с наибольшими погрешностями в блок расчета координат МС.
| ДАЛЬНОМЕРНЫЙ СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2506605C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ МЕЖДУ КОСМИЧЕСКИМ АППАРАТОМ И ИЗМЕРИТЕЛЬНЫМИ СТАНЦИЯМИ | 2006 |
|
RU2323860C1 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2278394C2 |
| Контактный узел для быстродействующих электрических аппаратов защиты | 1980 |
|
SU911644A1 |
| JP 2009276277 A, 26.11.2009 | |||
| WO 2002047419 A1, 13.06.2002 | |||
| БЕЗОБОЛОЧКОВОЕ УСТРОЙСТВО ДЛЯ УСТАНОВКИ АНАСТОМОЗНОГО КОЛЬЦА | 2006 |
|
RU2426505C2 |

