Изобретение относится к области управления многомерными техническими объектами, например, последовательным соединением отдельных упругих колебательных звеньев, входящих в состав манипулятора промышленного робота, а также к другим сервосистемам.
Известны системы управления манипуляторами, принцип действия которых заключается в подаче управляющих воздействий на исполнительные устройства объекта, например, на приводы манипуляторного устройства промышленного робота (Коловский М.З., Слоущ А.В. Основы динамики промышленных роботов. - М.: Наука, 1988. - 240 с., ил. - Научные основы робототехники). Данная система не обеспечивает качественного протекания переходных процессов, поскольку исключает возможности перерегулирования, особенно при наличии переменных параметров, например, при изменении конфигурации манипуляционных систем.
Также известна система управления (А.С. СССР №714350 / А.Ю. Дворженко и др. - Система управления. Опубл. 05.02.1980 г., БИ №5). Система управления содержит устройство задания, регулятор и объект, соединенные последовательно, измеритель рассогласования, выход которого через последовательно соединенные первый сумматор, усилитель и исполнительный механизм связан со входом объекта регулирования, датчик скорости объекта регулирования, выход которого через ключ подсоединен к входу первого сумматора, анализатор знаков сигналов, выход которого подключен к управляющему входу ключа, при этом с целью устранения перерегулирования и уменьшения времени переходного процесса системы при скачкообразном изменении ошибки в систему введены дифференциатор, второй сумматор, первый и второй нуль-органы, при этом выход измерителя рассогласования соединен со входами дифференциатора и второго нуль-органа, выходы первого и второго нуль-органов подключены ко входам анализатора знаков.
Недостатками данной системы является ее сложность, а также трудность осуществления дифференцирующих звеньев, которые входят в состав корректирующих устройств. Ввод корректирующих связей требует наличия соответствующих датчиков. Кроме этого, существует и принципиальное ограничение. Дело в том, что при аппроксимации системы колебательным звеном настройка системы, например, при подчиненном регулировании осуществляется фактически на определенный коэффициент демпфирования, практически равный примерно единице.
Наиболее близкой к заявленной по совокупности существенных признаков является система управления (Патент RU №2300794 - Заявка: 2005116804/09 от 01.06.2005. Опубл. 10.06.2007, Бюл. №16). Система управления содержит устройство задания, регулятор, объект и анализатор знаков сигналов. В систему дополнительно введены генераторы импульсов и элементы задержки, соединенные последовательно. Выходы анализатора знака подключены к входам генераторов импульса, а выходы элементов задержки подключены на вход регулятора. В данной системе снижена колебательность не только в пусковых режимах привода, но и обеспечена апериодичность в режимах торможения привода. В результате достигается высокое качество процесса позиционирования.
Недостатком системы является то, что вследствие неидеальности основного импульса будет наблюдаться остаточное перерегулирование, причем как в сторону увеличения, так в сторону уменьшения, или одновременно в сторону увеличения и в сторону уменьшения.
Изобретение направлено на устранение указанных недостатков.
Это достигается тем, что система управления манипулятором промышленного робота, содержащая устройство задания, регулятор, объект и анализатор знаков сигналов, согласно изобретению «Система управления манипулятором промышленного робота» дополнительно включает элемент сравнения, формирователь ширины импульсов и формирователь амплитуды импульсов.
Достижение технического результата обусловлено тем, что при неизменной замкнутой структуре, за счет введения корректировки формы импульса, в частности, с помощью формирователя ширины импульса и формирователя амплитуды импульса, достигается адаптивная подстройка к изменению параметров объекта.
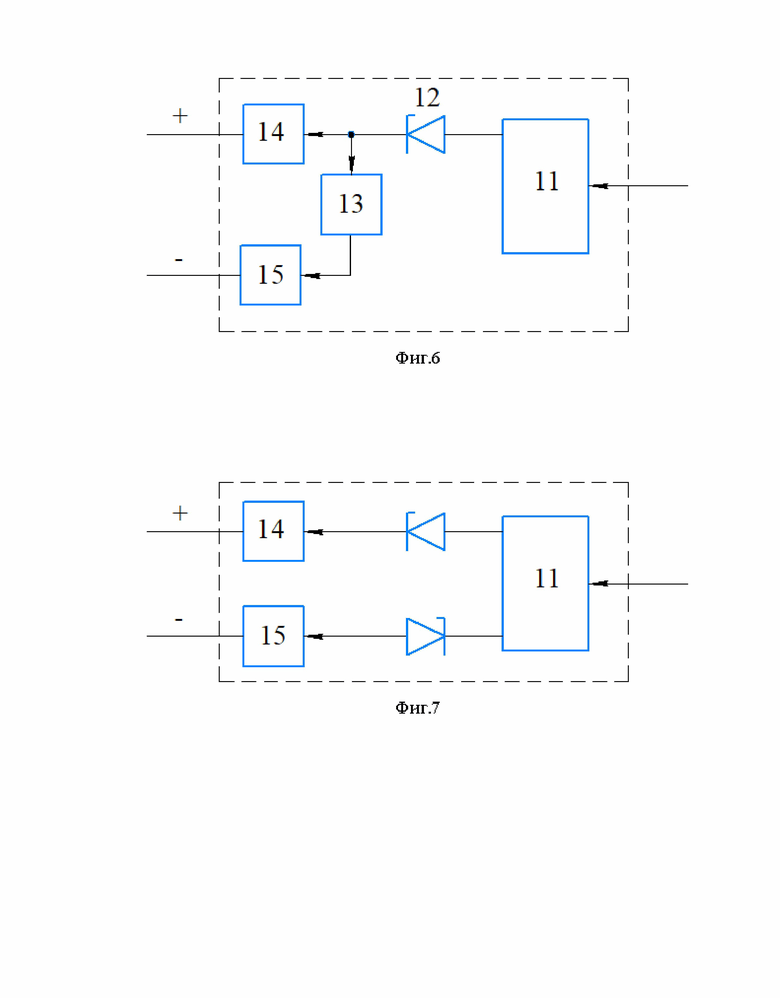
Сущность изобретения иллюстрируется чертежами, где на фиг. 1 показана функциональная схема предложенной системы, на фиг. 2 показана функционирование системы при идеальной форме импульса, на фиг. 3 при положительном перерегулировании, на фиг. 4 при отрицательном перерегулировании, на фиг. 5 при и положительном и отрицательном перерегулировании, на фиг. 6 и фиг. 7 показаны функциональные схемы возможных вариантов анализатора знаков.
Система содержит устройство задания 1, датчик обратной связи 2, регулятор 3, объект 4, пороговый элемент 5, анализатор знака 6, формирователь ширины импульса 7, формирователь амплитуды импульса 8, первый генератор импульса 9, второй генератор импульса 10. Анализатор знака может иметь несколько вариантов, например, по первому варианту сигнал от порогового элемента через согласующий усилитель 11 подается на стабилитрон 12, к выходу которого подключен элемент «НЕ» 13. В состав анализатора входят также масштабирующие усилители 14 и 15. Второй вариант анализатора представлен на фиг. 3 и отличается введением дополнительного встречно включенного стабилитрона.
Система работает следующим образом: исходный сигнал с устройства задания через элемент сравнения подается на пороговый элемент 5, анализатор знака 6, далее на формирователи 7 и 8, и генераторы 9 и 10. В первый момент на входы регулятора будут подаваться максимальные сигналы, которые далее передаются на объект, который в свою очередь воспринимает их с некоторой погрешностью. Далее сигнал через датчик обратной связи опять подается на элемент сравнения, пороговый элемент, анализатор знака, формирователи 7 и 8, и генераторы 9 и 10. В зависимости от получившегося остаточного перерегулирования сигнал подается уже на один из формирователей, или в случае наличия остаточного перерегулирования разных знаков опять на два формирователя. Это происходит до уменьшения остаточного перерегулирования в соответствии с заданными пороговыми значениями - показано двойной пунктирной полосой на фиг. 2, фиг. 3, фиг. 4, фиг. 5.
Таким образом, тот или иной генератор импульса включается в работу после первого достижения регулируемой величиной установившегося значения, т.е. после прошествии времени нарастания. При этом, если, например, вследствие изменения конфигурации руки робота постоянная времени объекта изменится, все равно после нового времени нарастания генератор импульса сработает, причем только один раз за время переходного процесса. Таким образом, импульсное воздействие, как и основное управляющее воздействие, прикладывается к объекту, но знак этого импульса воздействия противоположен знаку управляющего ступенчатого воздействия. Поскольку кривые реакций на ступенчатую функцию и функцию импульса разнонаправлены, суммарное воздействие характеризуется кривыми, показанными на фиг. 2, фиг. 3, фиг. 4, фиг. 5, реализация которых теоретически обеспечивает апериодичность с минимальной погрешностью при максимально возможном быстродействии, т.е. при минимальном времени нарастания. Уменьшение перерегулирования приводит к улучшению переходного процесса, устранению возможности задевания за препятствия, что увеличивает производительность объекта. Следует заметить, что реализация процессов, показанных на фиг. 3, фиг. 4 и особенно на фиг. 5 приводит к некоторому увеличению энергопотребления, которое окупается уменьшением перерегулирования.
Время переходного процесса, даже при наличии остаточной колебательности, значительно сокращается. Например, при коэффициенте демпфирования, равном 0,1, и постоянной времени, равной 1, время переходного процесса колебательного звена равно примерно 33 с, при перерегулировании 73%, а при использовании данной системы при этих же параметрах время регулирования равно 11 с, при перерегулировании 9%, при варьировании амплитуды и ширины импульса. Данные соотношения и результаты получены вследствие моделирования каналов управления в операционной среде Mat lab.
Достоинством системы является то, что данная система снижает колебательность не только в пусковых режимах привода, но и что с практической точки зрения более важно, обеспечивает апериодичность в режимах торможения привода. Этим достигается обеспечение высокого качества процесса позиционирования. Применение описанной системы обеспечивает монотонность и изменяет некоторые положения динамики регулируемого электромеханического привода. В частности, при использовании систем подчиненного регулирования, настройка на симметричный оптимум может дать на 30% меньше значение времени регулирования при монотонном процессе, чем при техническом оптимуме. Требует коррекции и известное положение о том, что основным параметром, влияющим на быстродействие системы второго порядка, является частота собственных колебаний системы, определяющая временной масштаб всех процессов. Выполнение этого положения приводило к тому, что величину коэффициента затухания обычно стремились держать в некоторых пределах, чаще всего около значения 0,707, при котором перерегулирование не превышает 4%. Использование данной системы управления позволяет значительно снизить коэффициент затухания (демпфирования), что приводит к уменьшению времени нарастания (установления), а следовательно, и к уменьшению времени регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ | 2005 |
|
RU2300794C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 1992 |
|
RU2036808C1 |
| Следящая система | 1990 |
|
SU1833831A1 |
| Следящая система | 1990 |
|
SU1829024A1 |
| БИОНИЧЕСКИЙ ШАГАЮЩИЙ АППАРАТ | 2005 |
|
RU2293014C1 |
| Устройство для моделирования оптимальной системы управления | 1980 |
|
SU928378A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
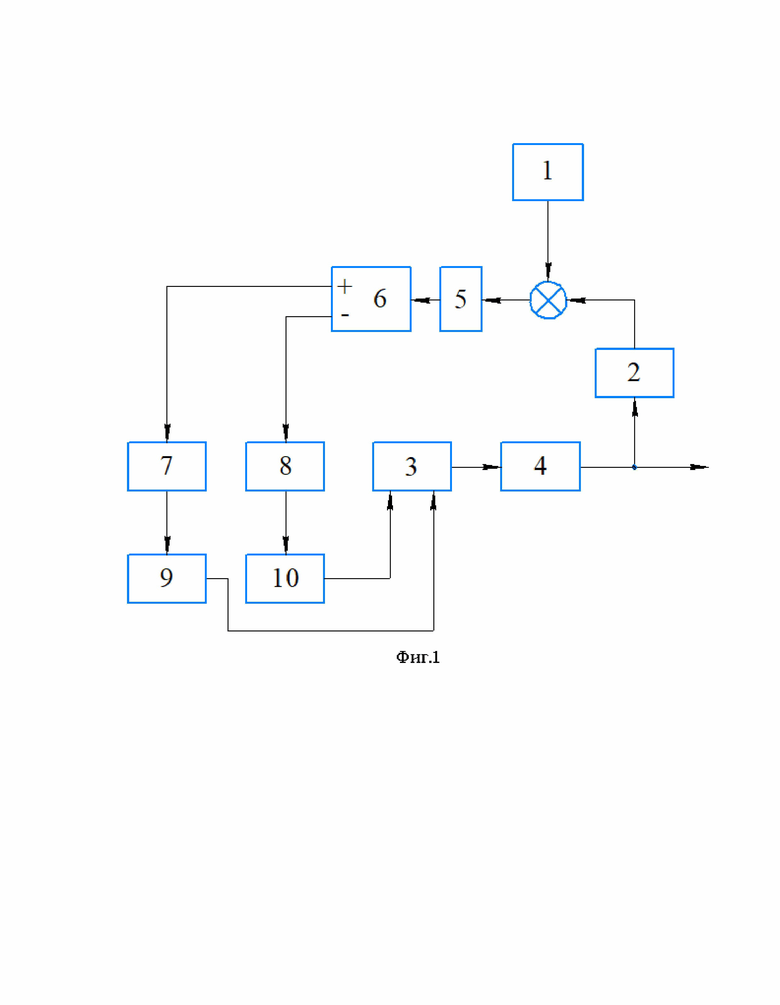

Изобретение относится к области вычислительной техники, а именно управления многомерными техническими объектами, входящими в состав манипулятора промышленного робота. Технический результат направлен на снижение колебательности не только в пусковых режимах привода, но и обеспечивает апериодичность в режимах торможения привода. Система управления манипулятором промышленного робота, содержащая устройство задания, регулятор, объект и анализатор знаков сигналов, отличающаяся тем, что дополнительно включает датчик обратной связи, элемент сравнения, формирователь ширины импульсов и формирователь амплитуды импульсов, а также первый и второй генератор импульсов, при этом устройство задания через элемент сравнения соединено с пороговым элементом, выход которого соединен с анализатором знака, положительный выход анализатора знака подключен к формирователю ширины импульса, выход которого подключен к первому генератору импульсов, при этом отрицательный выход анализатора знака подключен к формирователю амплитуды импульса, выход которого подключен ко второму генератору импульсов, выходы первого и второго генераторов импульсов подключены к регулятору, выход которого соединен с объектом, выход которого последовательно соединен с датчиком обратной связи, выход которого связан с элементом сравнения. 7 ил.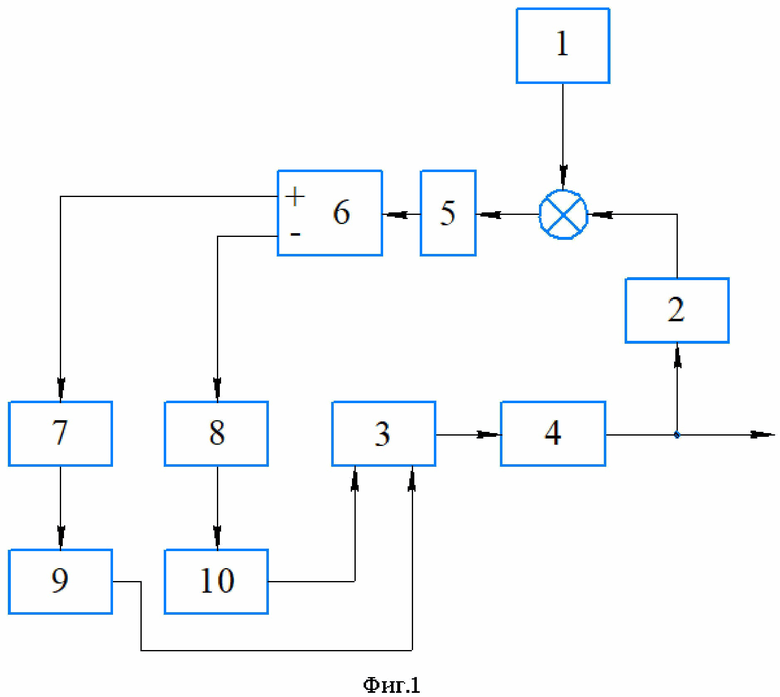
Система управления манипулятором промышленного робота, содержащая устройство задания, регулятор, объект и анализатор знаков сигналов, отличающаяся тем, что дополнительно включает датчик обратной связи, элемент сравнения, формирователь ширины импульсов и формирователь амплитуды импульсов, а также первый и второй генератор импульсов, при этом устройство задания через элемент сравнения соединено с пороговым элементом, выход которого соединен с анализатором знака, положительный выход анализатора знака подключен к формирователю ширины импульса, выход которого подключен к первому генератору импульсов, при этом отрицательный выход анализатора знака подключен к формирователю амплитуды импульса, выход которого подключен ко второму генератору импульсов, выходы первого и второго генераторов импульсов подключены к регулятору, выход которого соединен с объектом, выход которого последовательно соединен с датчиком обратной связи, выход которого связан с элементом сравнения.
| СИСТЕМА УПРАВЛЕНИЯ | 2005 |
|
RU2300794C2 |
| СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2332699C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2008 |
|
RU2372640C1 |
| CN 108267959 A, 10.07.2018. | |||
