Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств контроля работоспособности навигационной аппаратурой потребителя (НАП) спутниковой радионавигационной системы (СРНС) воздушного судна (ВС).
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ контроля НАП СРНС ВС (см., например, патент на изобретение №2748558 от 21 мая 2021 г. ), основанный на комплексировании НАП СРНС с инерциальной навигационной системой (ИНС), заключающийся в том, что определяют контрольные моменты времени ti на протяжении τпол. полета ВС, определяют расстояние RHAПi между пространственными координатами ВС, измеренными с использованием НАП СРНС в контрольные моменты времени ti и ti-1, определяют расстояние RИНСi между пространственными координатами ВС, измеренными с использованием ИНС в контрольные моменты времени ti и ti-1, определяют модуль MRi разности между расстояниями RНАПi и RИНСi, сравнивают модуль MRi разности между расстояниями RHAПi и RИНСi с заданным допустимым значением hR, если модуль MRi разности между расстояниями RHAПi и RИНСi не превышает заданного допустимого значения hR, то вырабатывают решение о работоспособности НАП СРНС на момент времени ti, в противном случае вырабатывают решение о неработоспособности НАП СРНС на момент времени.
К недостаткам прототипа относится снижение вероятности правильного контроля работоспособности НАП СРНС при относительно близких по значениям скоростях изменения расстояний RHAПi и RИНСi между контрольными моментами времени ti и ti-1. Это объясняется тем, что величины RHAПi и RИНСi зависят только от скоростей своих изменений VRHAПi и VRИНСi между двумя контрольными моментами времени ti и ti-1 (VRHAПi - скорость изменения величины RHAПi между двумя контрольными моментами времени ti и ti-1, VRИНСi - скорость изменения Иеличины RИНСi между двумя контрольными моментами времени ti и ti-1,). Из-за этого при относительно близких значениях VRHAПi и VRИНСi даже существенные отклонения измеренных НАП СРНС пространственных координат ВС от их истинных значений не будут приводить к существенной разности между расстояниями RHAПi и RИНСi. В результате этого снижается вероятность выявления неработоспособности НАП СРНС в частности и вероятность правильного контроля работоспособности НАП СРНС в целом.
Техническим результатом изобретения является повышение вероятности правильного контроля работоспособности НАП СРНС.
Указанный результат достигается тем, что в известном способе после этапа определения модуля MRi формируют частный признак χRi работоспособности НАП СРНС по модулю МRi, при этом если модуль MRi не превышает заданное пороговое значение hR, то формируют частный признак χRi=1, в противном случае формируют частный признак χRi=0, если χRi=0, то формируют решение χi=0 о том, что НАП СРНС является неработоспособной на контрольный момент времени ti, в противном случае определяют разность rxi относительных изменений координат ВС по оси ОХ заданной прямоугольной системы координат OXYZ, измеренных с использованием ИНС и НАП между контрольными моментами времени ti и ti-1, формируют частный признак χxi работоспособности НАП СРНС по разности rxi,, при этом если разность rxi находится в допустимом интервале значений для работоспособной НАП СРНС, то формируют частный признак χxi=1, в противном случае формируют частный признак χxi=0, если χxi=0, то формируют решение χi=0 о том, что НАП СРНС является неработоспособной на контрольный момент времени ti, в противном случае определяют разность ryi относительных изменений координат ВС по оси OY заданной прямоугольной системы координат OXYZ, измеренных с использованием ИНС и НАП между контрольными моментами времени ti и ti-1, формируют частный признак χyi работоспособности НАП СРНС по разности ryi, при этом если разность ryi находится в допустимом интервале значений для работоспособной НАП СРНС, то формируют частный признак χyi=1, в противном случае формируют частный признак χyi=0, если χyi=0, то формируют решение χi=0 о том, что НАП СРНС является неработоспособной на контрольный момент времени, в противном случае определяют разность rzi относительных изменений координат ВС по оси OZ заданной прямоугольной системы координат OXYZ, измеренных с использованием ИНС и НАП между контрольными моментами времени ti и ti-1, формируют частный признак χzi работоспособности НАП СРНС по разности rzi, при этом если разность rzi находится в допустимом интервале значений для работоспособной НАП СРНС, то формируют частный признак χzi=1, в противном случае формируют частный признак χzi=0, если χzi=0, то формируют решение χi=0 о том, что НАП СРНС является неработоспособной на контрольный момент времени ti, в противном случае формируют решение χi=1 о том, что НАП СРНС является работоспособной на контрольный момент времени ti.
Сущность изобретения заключается в том, что для формирования решения о неработоспособности НАП СРНС наряду с процедурой выявления несоответствия расстояний между двумя контрольными точками, определяемых с использованием НАП СРНС с одной стороны и ИНС с другой стороны в контрольные моменты времени ti и ti-1 на протяжении полета ВС применяются процедуры выявления несоответствия между разностями относительных изменений координат ВС по осям заданной прямоугольной системы координат OXYZ, измеренных НАП СРНС с одной стороны и ИНС с другой стороны в контрольные моменты времени ti и ti-1. Это позволяет выявлять факты неработоспособности НАП СРНС даже при относительно близких по значениям скоростях изменения расстояний RНАПi и RИНСi, и, как следствие, приводит к повышению вероятности правильного контроля работоспособности НАП СРНС.
Данный способ включает в себя следующие этапы:
1. Измерение пространственных координат хНАП=[хНАП,уНАП,zНАП] ВС в заданной прямоугольной системе координат OXYZ с использованием НАП СРНС в течение полета ВС.
2. Измерение пространственных координат хИНС=[хИНС,уИНС,zИНС] ВС в заданной прямоугольной системе координат OXYZ с использованием ИНС в течение полета ВС.
3. Определение контрольных моментов времени ti на протяжении τпол. полета ВС в соответствии с выражением

где t1 - первый заданный контрольный момент времени,  - заданный интервал времени между контрольными моментами времени ti, τпол. - длительность полета воздушного судна.
- заданный интервал времени между контрольными моментами времени ti, τпол. - длительность полета воздушного судна.
4. Определение расстояния RHAПi между пространственными координатами ВС, измеренными с использованием НАП СРНС в контрольные моменты времени ti и ti-1 в соответствии с выражением

5. Определение расстояния RИHCi между пространственными координатами ВС, измеренными с использованием ИНС в контрольные моменты времени ti и ti-1 в соответствии с выражением

6. Определение модуля разности между расстояниями RHAПi и RИНСi в соответствии с выражением

7. Формирование частного признака χRi работоспособности НАП СРНС по модулю MRi в соответствии с выражением

где χRi=1 - модуль MRi удовлетворяет требованиям работоспособности НАП СРНС (модуль MRi имеет допустимое значение для работоспособной НАП СРНС); χRi=0 - модуль MRi не удовлетворяет требованиям работоспособности НАП СРНС (модуль MRi имеет недопустимое значение для работоспособной НАП СРНС); hR - заданное пороговое (граничное допустимое) значение модуля MRi разности между расстояниями RHAПi и RИНСi для работоспособной НАП СРНС.
8. Если на этапе №7 сформирован частный признак χRi=0, то формирование решения χi=0 о том, что НАП СРНС является неработоспособной на контрольный момент времени ti, иначе переход на этап №9.
9. Определение разности rxi относительных изменений координат ВС по оси ОХ заданной прямоугольной системы координат OXYZ, измеренных с использованием ИНС ΔхИНСi и НАП ΔхНАПi между контрольными моментами времени ti и ti-1, в соответствии с выражением

где ΔхИНСi=хИНСi - хИНС(i-1) - относительное изменение координаты ВС по оси ОХ заданной прямоугольной системы координат OXYZ, измеренной с использованием ИНС между контрольными моментами времени ti и ti-1;
ΔхНАПi=хНАПi - хНАП(i-1) - относительное изменение координаты ВС по оси ОХ заданной прямоугольной системы координат OXYZ, измеренной с использованием НАП между контрольными моментами времени ti и ti-1.
10. Формирование частного признака χxi работоспособности НАП СРНС по разности rxi в соответствии с выражением

где χxi=1 - разность rxi удовлетворяет требованиям работоспособности НАП СРНС (разность rxi имеет допустимое значение для работоспособной НАП СРНС); χxi=0 - разность rxi не удовлетворяет требованиям работоспособности НАП СРНС (разность rxj имеет недопустимое значение для работоспособной НАП СРНС); [-hx,hx]=ΔДоп.x - допустимый интервал значении разности rxi для работоспособной НАП СРНС; -hx, hx - заданные пороговые (граничные допустимые) значения разности rxi для работоспособной НАП СРНС.
11. Если на этапе №10 сформирован частный признак χxi=0, то формирование общего решения χi=0 о том, что НАП СРНС является неработоспособной на контрольный момент времени ti, иначе переход на этап №12.
12. Определение разности ryi относительных изменений координат ВС по оси OY заданной прямоугольной системы координат OXYZ, измеренных с использованием ИНС ΔуИНСi и НАП ΔуНАПi между контрольными моментами времени ti и ti-1, в соответствии с выражением

где ΔуИНСi=уИНСi - yИНС(i-1) - относительное изменение координаты ВС по оси OY заданной прямоугольной системы координат OXYZ, измеренной с использованием ИНС между контрольными моментами времени ti и ti-1;
ΔyНАПi=yНАПi - yНАП(i-1) - относительное изменение координаты ВС по оси OY заданной прямоугольной системы координат OXYZ, измеренной с использованием НАП между контрольными моментами времени ti и ti-1.
13. Формирование частного признака χyi работоспособности НАП СРНС по разности ryi в соответствии с выражением

где χyi=1 _ разность ryi удовлетворяет требованиям работоспособности НАП СРНС (разность ryi имеет допустимое значение для работоспособной НАП СРНС); χyi=0 - разность ryi. не удовлетворяет требованиям работоспособности НАП СРНС (разность ryi имеет недопустимое значение для работоспособной НАП СРНС); [-hy,hy]=ΔДоп.y - допустимый интервал значений разности ryi. для работоспособной НАП СРНС; -hy,,hy - заданные пороговые (граничные допустимые) значения разности ryi для работоспособной НАП СРНС.
14. Если на этапе №13 сформирован частный признак χyi=0, то формирование общего решения χi=0 о том, что НАП СРНС является неработоспособной на контрольный момент времени ti, иначе переход на этап №15.
15. Определение разности rzi относительных изменений координат ВС по оси OZ заданной прямоугольной системы координат OXYZ, измеренных с использованием ИНС ΔzИНСi и НАП ΔzНАПi между контрольными моментами времени ti и ti-1, в соответствии с выражением

где ΔzИНСi=zИНСi - zИНС(i-1) - относительное изменение координаты ВС по оси OZ заданной прямоугольной системы координат OXYZ, измеренной с использованием ИНС между контрольными моментами времени ti и ti-1;
ΔzНАПi=zНАПi - zНАП(i-1) - относительное изменение координаты ВС по оси OZ заданной прямоугольной системы координат OXYZ, измеренной с использованием НАП между контрольными моментами времени ti и ti-1.
16. Формирование частного признака χzi работоспособности НАП СРНС χzi по разности rzi в соответствии с выражением

где χzi=1 - разность rzi удовлетворяет требованиям работоспособности НАП СРНС (разность rzi имеет допустимое значение для работоспособной НАП СРНС); χzi=0 - разность rzi не удовлетворяет требованиям работоспособности НАП СРНС (разность rzi имеет недопустимое значение для работоспособной НАП СРНС); [-hz,hz]=ΔДоп.z - допустимый интервал значений разности rzi для работоспособной НАП СРНС; -hz, hz - заданные пороговые (граничные допустимые) значения разности rzi для работоспособной НАП СРНС.
17. Если на этапе №16 сформирован частный признак χzi=0, то формирование решения χi=0 о том, что НАП СРНС является неработоспособной на контрольный момент времени ti, иначе формирование решения χi=1 о том, что НАП СРНС является работоспособной на контрольный момент времени ti.
В соответствии с этапами 7-17, решение χi=1 о том, что НАП СРНС является работоспособной формируется в том случае, если на контрольный момент времени ti выполняются следующие условия: модуль МRI не превышает заданного допустимого значения hR; разность rxi находится в допустимом интервале ΔДоп.х; разность ryi находится в допустимом интервале ΔДоп.y; разность rzi находится в допустимом интервале ΔДоп.у. При невыполнении любого из вышеперечисленных условий формируется решение χi=0 о том, что НАП СРНС является неработоспособной. То есть, для формирования решения χi=0 о неработоспособности НАП СРНС наряду с процедурой выявления несоответствия расстояний между двумя контрольными точками, определяемых с использованием НАП СРНС с одной стороны и ИНС с другой стороны в контрольные моменты времени ti и ti-1 на протяжении полета ВС применяются процедуры выявления несоответствия между разностями относительных изменений координат ВС по осям заданной прямоугольной системы координат OXYZ, измеренных НАП СРНС с одной стороны и ИНС с другой стороны в контрольные моменты времени ti и ti-1. Это позволяет выявлять факты неработоспособности НАП СРНС даже при относительно близких по значениям скоростях изменения расстояний RНАПi и RИНСi, и как следствие, приводит к повышению вероятности правильного контроля работоспособности НАП СРНС.
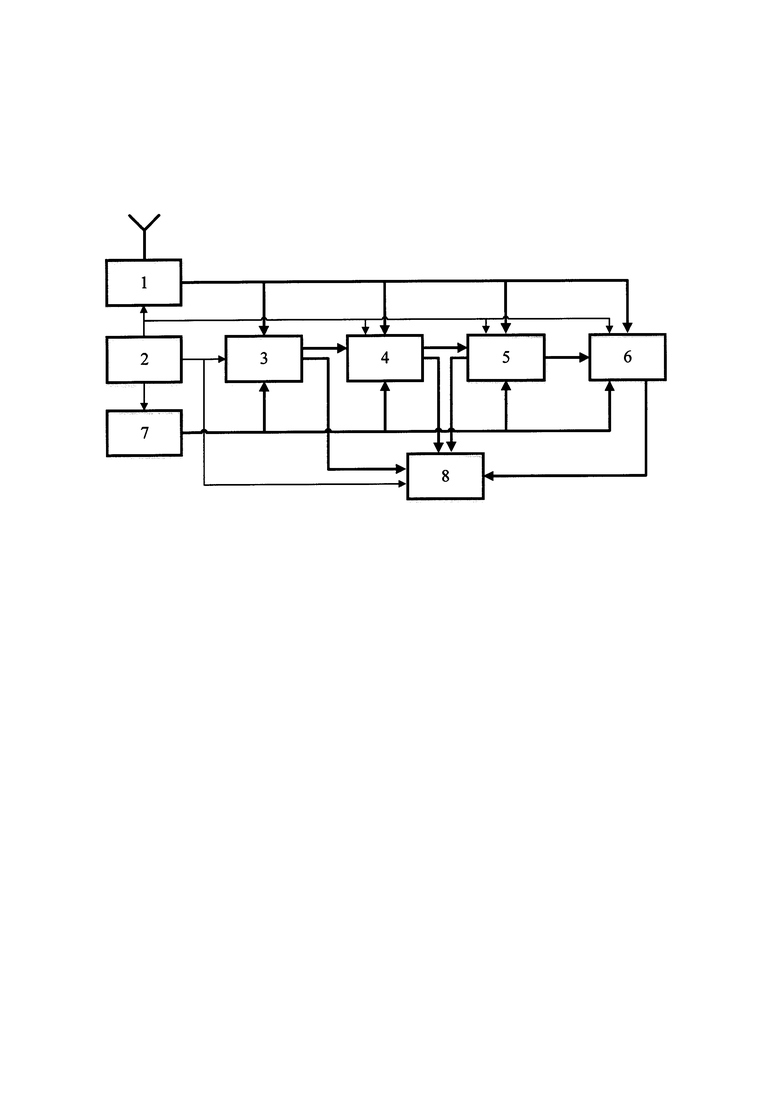
Данный способ может быть реализован, например, с помощью комплекса устройств и систем, структурная схема которого приведена на фигуре, где обозначено: 1 - НАП СРНС; 2 - устройство управления комплексом (УУК); 3 - формирователь частного признака (ФЧП); 4 - ФЧП; 5 - ФЧП; 6 - ФЧП; 7 - ИНС; 8 - оконечное устройство (ОУ).
НАП СРНС 1 предназначена для измерения пространственных координат хНАП=[xНАП,yНАП,zНАП] ВС в заданной прямоугольной системе координат OXYZ. УУК 2 предназначен для управления работой комплекса и определения контрольных моментов времени ti на протяжении τпол. полета ВС.
ФЧП 3 предназначен для формирования частного признака χRi работоспособности НАП СРНС по модулю МRi. ФЧП 4 предназначен для формирования частного признака χxi работоспособности НАП СРНС по разности rxi. ФЧП 5 предназначен для формирования частного признака xyi работоспособности НАП СРНС по разности ryi. ФЧП 6 предназначен для формирования частного признака χZi работоспособности НАП СРНС по разности rzi. ИНС 7 предназначена для измерения пространственных координат хИНС=[хИНС,yИНС,zИНС] ВС в заданной прямоугольной системе координат OXYZ. ОУ 8 предназначено для формирования решения χi о работоспособности или неработоспособности НАП СРНС.
Комплекс работает следующим образом. НАП СРНС 1 формирует измерения пространственных координат хНАП=[хНАП,уНАП,zНАП] ВС в заданной прямоугольной системе координат OXYZ в течение его полета. ИНС 7 формирует измерения пространственных координат хИНС=[хИНС,уИНС,zИНС] ВС в заданной прямоугольной системе координат OXYZ в течение его полета. УУК 2 управляет работой комплекса и определяет контрольные моменты времени ti на протяжении полета ВС в соответствии с выражением (1). Под управлением УУК 2 значения xНАПi=[xНАПi,yНАПi,zНАПi] и xИНС=[xИНСi,yИНСi,zИНСi] пространственных координат ВС в контрольные моменты времени поступают с выходов НАП СРНС 1 и ИНС 7 соответственно в ФЧП 3, ФЧП 4, ФЧП 5 и ФЧП 6. ФЧП 3 обрабатывает поступающую информацию с выхода НАП СРНС 1 и ИНС 7 в соответствии с выражениями (2)-(4) и формирует частный признак χRi работоспособности НАП СРНС в соответствии с выражением (5). Если формируется частный признак XRi=1, то он с выхода ФЧП 3 поступает на вход ФЧП 4, а если формируется частный признак χRi=0, то он с выхода ФЧП 3 поступает на вход УО 8. ФЧП 4, при поступлении на его вход с выхода ФЧП 3 частного признака XRi=1, обрабатывает поступающую информацию с выходов НАП СРНС 1 и ИНС 7 в соответствии с выражением (6) и формирует частный признак χxi работоспособности НАП СРНС в соответствии с выражением (7). Если формируется частный признак χxi=1, то он с выхода ФЧП 4 поступает на вход ФЧП 5, а если формируется частный признак χxi=0, то он с выхода ФЧП 4 поступает на вход УО 8. ФЧП 5, при поступлении на его вход с выхода ФЧП 4 частного признака χxi=1, обрабатывает поступающую информацию с выходов НАП СРНС 1 и ИНС 7 в соответствии с выражением (8) и формирует частный признак χyi работоспособности НАП СРНС в соответствии с выражением (9). Если формируется частный признак χyi=1, то он с выхода ФЧП 5 поступает на вход ФЧП 6, а если формируется частный признак χyi=0, то он с выхода ФЧП 5 поступает на вход УО 8. ФЧП 6, при поступлении на его вход с выхода ФЧП 5 частного признака χyi=1, обрабатывает поступающую информацию с выходов НАП СРНС 1 и ИНС 7 в соответствии с выражением (10) и формирует частный признак χZi работоспособности НАП СРНС в соответствии с выражением (11). Частный признак χZi работоспособности НАП СРНС с выхода ФЧП 5 поступает на вход УО 8. УО 8 обрабатывает поступающую на его вход информацию с выходов ФЧП 3, ФЧП 4, ФЧП 5, ФЧП 6 и формирует решение χi о работоспособности или неработоспособности НАП СРНС. При этом решение χi=1 о том, что НАП СРНС является работоспособной на контрольный момент времени ti формируется в том случае, если на вход ОУ 8 с выхода ФЧП 6 поступает частный признак χZi=1 в противном случае формируется решение χi=0 о том, что НАП СРНС является неработоспособной на контрольный момент времени ti.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ контроля работоспособности НАП СРНС ВС, сущность которого заключается в том, что для формирования решения о неработоспособности НАП СРНС наряду с процедурой выявления несоответствия расстояний между двумя контрольными точками, определяемых с использованием НАП СРНС с одной стороны и ИНС с другой стороны в контрольные моменты времени ti и ti-1 на протяжении полета ВС применяются процедуры выявления несоответствия между разностями относительных изменений координат ВС по осям заданной прямоугольной системы координат OXYZ, измеренных НАП СРНС с одной стороны и ИНС с другой стороны в контрольные моменты времени ti и ti-1. Это позволяет выявлять факты неработоспособности НАП СРНС даже при относительно близких по значениям скоростях изменения расстояний RНАПi и RИНСi, и как следствие, приводит к повышению вероятности правильного контроля работоспособности НАП СРНС.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что если для формирования решения о неработоспособности НАП СРНС наряду с процедурой выявления несоответствия расстояний между двумя контрольными точками, определяемых с использованием НАП СРНС с одной стороны и ИНС с другой стороны в контрольные моменты времени ti и ti-1 на протяжении полета ВС применять процедуры выявления несоответствия между разностями относительных изменений координат ВС по осям заданной прямоугольной системы координат OXYZ, измеренных НАП СРНС с одной стороны и ИНС с другой стороны в контрольные моменты времени ti и ti-1, то это приведет к повышению вероятности правильного контроля работоспособности НАП СРНС.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств контроля работоспособности навигационной аппаратурой потребителя (НАП) спутниковой радионавигационной системы (СРНС) воздушного судна (ВС). Техническим результатом изобретения является повышение вероятности правильного контроля работоспособности НАП СРНС. В заявленном способе для формирования решения о неработоспособности НАП СРНС наряду с процедурой выявления несоответствия расстояний между двумя контрольными точками, определяемых с использованием НАП СРНС с одной стороны и инерциальной навигационной системы (ИНС) с другой стороны в контрольные моменты времени ti и ti-1, на протяжении полета ВС применяются процедуры выявления несоответствия между разностями относительных изменений координат ВС по осям заданной прямоугольной системы координат OXYZ, измеренных НАП СРНС с одной стороны и ИНС с другой стороны в контрольные моменты времени ti и ti-1. 1 ил.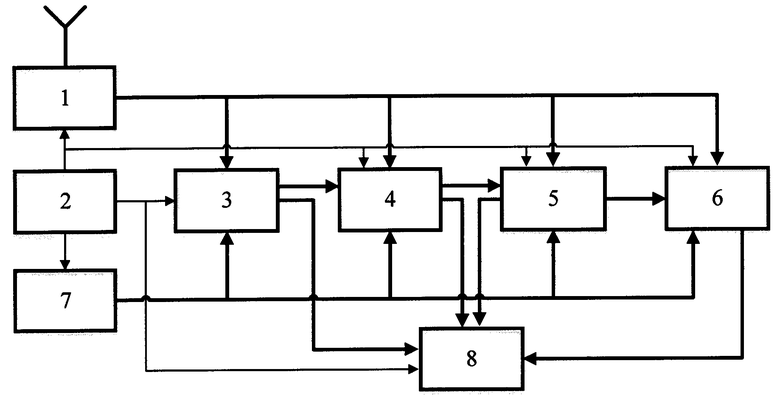
Способ контроля работоспособности навигационной аппаратуры потребителя (НАП) спутниковой радионавигационной системы (СРНС) воздушного судна (ВС), заключающийся в том, что измеряют пространственные координаты ВС в заданной прямоугольной системе координат OXYZ с использованием НАП СРНС на протяжении полета ВС, измеряют пространственные координаты ВС в заданной прямоугольной системе координат OXYZ с использованием инерциальной навигационной системы (ИНС) на протяжении полета ВС, определяют контрольные моменты времени ti на протяжении полета ВС, определяют расстояние RНАПi между пространственными координатами ВС, измеренными с использованием НАП СРНС в контрольные моменты времени ti и ti-1, определяют расстояние RИНСi между пространственными координатами ВС, измеренными с использованием ИНС в контрольные моменты времени ti и ti-1, определяют модуль MRi разности между расстояниями RНАПi и RИНСi, отличающийся тем, что формируют частный признак χRi работоспособности НАП СРНС по модулю МRi, при этом если модуль МRi не превышает заданное пороговое значение hR, то формируют частный признак χRi=1, в противном случае формируют частный признак χRi=0, если χRi=0, то формируют решение χi=0 о том, что НАП СРНС является неработоспособной на контрольный момент времени ti, в противном случае определяют разность rxi относительных изменений координат ВС по оси ОХ заданной прямоугольной системы координат OXYZ, измеренных с использованием ИНС и НАП между контрольными моментами времени ti и ti-1, формируют частный признак χxi работоспособности НАП СРНС по разности rxi, при этом если разность rxi находится в допустимом интервале значений для работоспособной НАП СРНС, то формируют частный признак χxi=1, в противном случае формируют частный признак χxi=0, если χxi=0, то формируют решение χi=0 о том, что НАП СРНС является неработоспособной на контрольный момент времени ti, в противном случае определяют разность ryi относительных изменений координат ВС по оси OY заданной прямоугольной системы координат OXYZ, измеренных с использованием ИНС и НАП между контрольными моментами времени ti и ti-1, формируют частный признак χyi работоспособности НАП СРНС по разности ryi, при этом если разность ryi находится в допустимом интервале значений для работоспособной НАП СРНС, то формируют частный признак χyi=1, в противном случае формируют частный признак χуi=0, если χyi=0, то формируют решение χi=0 о том, что НАП СРНС является неработоспособной на контрольный момент времени ti, в противном случае определяют разность rzi относительных изменений координат ВС по оси OZ заданной прямоугольной системы координат OXYZ, измеренных с использованием ИНС и НАП между контрольными моментами времени ti и ti-1, формируют частный признак χzi работоспособности НАП СРНС по разности rzi, при этом если разность rzi находится в допустимом интервале значений для работоспособной НАП СРНС, то формируют частный признак χzi=1, в противном случае формируют частный признак χzi=0, если χzi=0, то формируют решение χi=0 о том, что НАП СРНС является неработоспособной на контрольный момент времени ti, в противном случае формируют решение χi=1 о том, что НАП СРНС является работоспособной на контрольный момент времени ti.

