[0001] Настоящее изобретение относится к машине для погрузочно-разгрузочных работ.
В частности, оно относится к машине для погрузочно-разгрузочных работ, содержащей колесное шасси и поддерживаемые посредством указанного шасси
- тепловой двигатель внутреннего сгорания,
- механизм передачи мощности, выполненный с возможностью передачи мощности теплового двигателя на колеса шасси,
- ковш,
- систему для приведения в движение указанного ковша,
- блок управления
- педаль управления дроссельной заслонкой, причем блок управления выполнен с возможностью генерирования уставки по скорости вращения для теплового двигателя в зависимости от положения педали управления дроссельной заслонкой,
- орган управления, такой как джойстик, который может приводиться в действие вручную оператором машины и выполнен с возможностью генерирования управляющих уставок системы для приведения в движение ковша, в зависимости от приведения в действие органа управления,
- систему для обнаружений перемещений ковша относительно шасси, выполненную с возможностью подачи на блок управления данных, характеризующих перемещения ковша относительно шасси и/или относительно системы для приведения в движение ковша.
[0002] Кроме того, следует отметить, что известны решения для снижения скорости вращения двигателя, несмотря на приведение в действие педали управления дроссельной заслонкой, как показано в документе US 2009/111655.
[0003] Аналогичным образом, известны решения для определения положения ковша, как показано в документе EP 3342936.
[0004] Такая машина для погрузочно-разгрузочных работ известна, как показано, например, из патентной заявки EP3358087. Такая машина для погрузочно-разгрузочных работ очень часто используется для транспортировки сыпучих материалов, хранящихся в кучах, из кучи к емкости с целью загрузки указанной емкости указанным материалом. На практике, если оператор хочет выполнить операцию по заполнению ковша материалом, хранящимся в куче, с целью его перегрузки в другой пункт, рефлекторное действие оператора будет состоять в продвижении ковша при полной мощности внутрь кучи для заполнения ковша настолько, насколько это максимально возможно за один прием, чтобы таким образом повысить производительность. Затем оператор пытается, удерживая свою ногу на педали управления дроссельной заслонкой, одновременно выполнять операции копания ковшом и подъема стрелы, чтобы завершить заполнение ковша и отправиться с ковшом, заполненным до максимума. Однако это одновременное выполнение продвижения и перемещения ковша необязательно преобразуются в извлечение материала из кучи. При столкновении с данной ситуацией, когда машина больше не продвигается (колеса заблокированы или буксуют) и, несмотря на команды подъема стрелы и/или копания ковшом, система для приведения в движение ковша неспособна поднять ковш, рефлекторное действие оператора состоит в еще более сильном нажатии на педаль управления дроссельной заслонкой. Результат этого состоит в преждевременном износе шин вследствие пробуксовки колес, избыточном расходе топлива, высокой нагрузке на механические части с высоким риском поломки этих механических частей, и отсутствии оптимизации моментов загрузки ковша.
[0005] Одна цель настоящего изобретения состоит в создании машины вышеуказанного типа для погрузочно-разгрузочных работ, конструкция которой обеспечивала бы возможность оптимизации моментов загрузки ковша материалом, хранящимся в куче, при предохранении механически частей и шин машины.
[0006] Еще одна цель настоящего изобретения состоит в создании машины вышеуказанного типа, конструкция которой обеспечивала бы возможность оптимизации моментов загрузки ковша без компромисса по расходу топлива в машине.
[0007] С этой целью, объект настоящего изобретения представляет собой машину для погрузочно-разгрузочных работ, содержащую колесное шасси и поддерживаемые посредством указанного шасси:
- тепловой двигатель внутреннего сгорания,
- механизм передачи мощности, выполненный с возможностью передачи мощности теплового двигателя на колеса шасси,
- ковш,
- систему для приведения в движение ковша,
- блок управления,
- педаль управления дроссельной заслонкой, причем блок управления выполнен с возможностью генерирования уставок для регулирования скорости вращения теплового двигателя в зависимости от положения педали управления дроссельной заслонкой,
- орган управления, такой как джойстик, который выполнен с возможностью приведения в действие вручную оператором машины и выполнен с возможностью генерирования управляющих уставок системы для приведения в движение ковша, в зависимости от приведения в действие органа управления,
- систему для обнаружения перемещений ковша относительно шасси и/или системы для приведения в движение ковша, выполненную с возможностью передачи данных, характеризующих перемещения ковша относительно шасси и/или системы для приведения в движение ковша, на блок управления, отличающееся тем, что механизм передачи мощности выполнен таким образом, что снижение скорости вращения теплового двигателя приводит к снижению крутящего момента, прикладываемого к колесам шасси, и тем, что машина имеет по меньшей мере один режим работы, в котором блок управления выполнен с возможностью -, в зависимости от данных, подаваемых системой для обнаружения ковша, и от управляющих уставок системы для приведения в движения ковша, - снижения скорости вращения теплового двигателя внутреннего сгорания до значения, меньшего, чем значение уставки для регулирования скорости, соответствующее положению педали управления дроссельной заслонкой. Таким образом, блок управления выполнен с возможностью снижения скорости вращения теплового двигателя до скорости, меньшей, чем значение уставки для регулирования скорости вращения, соответствующее положению педали управления дроссельной заслонкой, если обнаруженные перемещения ковша не соответствуют командам управления перемещением ковша. Благодаря такой конструкции, обеспечивается возможность снижения бокового давления, прикладываемого машиной к куче материала, независимо от команды, подаваемой оператором посредством педали управления дроссельной заслонкой. Благодаря снижению бокового давления, обеспечивается возможность ослабления нажатия ковша на кучу или его трения о нее, которые (нажатие и трение) способны противодействовать копательному или опорожняющему перемещению ковша. Значение скорости вращения теплового двигателя не обязательно соответствует значению уставки для регулирования скорости вращения, соответствующему положению педали управления дроссельной заслонкой, так что оператор может удерживать свою ногу на педали управления дроссельной заслонкой или даже еще сильнее нажимать на нее без повышения бокового давления, прикладываемого машиной к куче. Таким образом, не требуется обучение оператора, чтобы требовать от него изменения своих действий в отношении манипулирования педалью управления дроссельной заслонкой. Указанное снижение бокового давления, в зависимости от конструкции машины, может также создаваться для содействия усилию извлечения, создаваемому в результате перемещения ковша. И наконец, данная конструкция обеспечивает возможность предохранения машины и снижения расхода топлива в машине при одновременной оптимизации моментов загрузки ковша.
[0008] Согласно одному варианту осуществления настоящего изобретения, блок управления выполнен с возможностью определения, в зависимости от управляющих уставок системы для приведения в движение ковша, приведения в действие органа управления в направлении перемещения ковша и с возможностью определения, в зависимости от данных, подаваемых системой для обнаружения перемещений ковша, перемещения или отсутствия перемещения ковша, а блок управления выполнен с возможностью снижения скорости вращения теплового двигателя внутреннего сгорания до значения, меньшего, чем значение уставки по скорости вращения, соответствующее положению педали управления дроссельной заслонкой, когда блоком управления определено отсутствие перемещения, и при этом орган управления находится в состоянии, в котором он приведен в действие в направлении перемещения ковша. Таким образом, блок управления выполнен с возможностью снижения скорости вращения теплового двигателя до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали управления дроссельной заслонкой, если определено отсутствие перемещения ковша и при этом орган управления находится в состоянии, приведенном в действие для приведения в движение ковша.
[0009] Согласно одному варианту осуществления настоящего изобретения, блок управления выполнен с возможностью определения, в зависимости от управляющих уставок системы для приведения в движение ковша, теоретической величины перемещения ковша при нахождении органа управления в приведенном в действие состоянии, и с возможностью определения, в зависимости от данных, подаваемых системой для обнаружения перемещений ковша, реальной величины перемещения ковша, причем блок управления выполнен с возможностью сравнения теоретического и практического значений величины перемещения ковша и с возможностью снижения скорости вращения теплового двигателя до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали управления дроссельной заслонкой, в зависимости от результата сравнения. Таким образом, блок управления выполнен с возможностью снижения скорости вращения теплового двигателя до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали управления дроссельной заслонкой, если реальная величина перемещения ковша меньше, чем теоретическая величина перемещения ковша.
[0010] Согласно одному варианту осуществления настоящего изобретения, блок управления выполнен с возможностью определения, в зависимости от управляющих уставок системы для приведения в движение ковша, теоретической скорости перемещения ковша при нахождении органа управления в приведенном в действие состоянии, и с возможностью определения, в зависимости от данных, подаваемых системой для определения перемещений ковша, реальной скорости перемещения ковша, причем блок управления выполнен с возможностью сравнения теоретического и реального значений скорости перемещения ковша и с возможностью снижения скорости вращения теплового двигателя до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали управления дроссельной заслонкой, в зависимости от результата сравнения. Таким образом, блок управления выполнен с возможностью снижения скорости вращения теплового двигателя до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали управления дроссельной заслонкой, если реальная скорость перемещения ковша меньше, чем теоретическая скорость перемещения ковша.
[0011] Согласно одному варианту осуществления настоящего изобретения, блок управления выполнен с возможностью определения, в зависимости от управляющих уставок системы для приведения в движение ковша, теоретического ускорения перемещения ковша при нахождении органа управления в приведенном в действие состоянии, и с возможностью определения, в зависимости от данных, подаваемых системой для определения перемещений ковша, реального ускорения перемещения ковша, причем блок управления выполнен с возможностью сравнения теоретического и реального значений ускорения перемещения ковша и с возможностью снижения скорости вращения теплового двигателя до значения, меньшего, чем значение уставки для регулирования скорости, соответствующее положению педали управления дроссельной заслонкой, в зависимости от результата сравнения. Таким образом, блок управления выполнен с возможностью снижения скорости вращения теплового двигателя до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали управления дроссельной заслонкой, если реальное ускорение перемещения ковша меньше, чем теоретическое ускорение перемещения ковша.
[0012] Согласно одному варианту осуществления настоящего изобретения, механизм передачи мощности представляет собой гидродинамический механизм передачи мощности, который содержит гидротрансформатор крутящего момента.
[0013] Согласно одному варианту осуществления настоящего изобретения, машина содержит селектор положения по меньшей мере с двумя положениями, а именно положением управления передним ходом и положением управления задним ходом, указанный орган управления имеет нейтральное положение, и режим работы, в котором блок управления выполнен с возможностью -, в зависимости от данных, подаваемых системой для обнаружения перемещений ковша, и управляющих уставок системы для приведения в движение ковша, - снижения скорости вращения теплового двигателя до значения, меньшего, чем значение, задаваемое педалью управления дроссельной заслонкой, представляет собой активируемый/деактивируемый режим работы, причем указанный режим работы деактивирован при нахождении селектора положения в положении управления задним ходом и при нахождении органа управления в нейтральном положении.
[0014] Согласно одному варианту осуществления настоящего изобретения, система для приведения в движение ковша содержит гидравлическую часть, связанную с тепловым двигателем внутреннего сгорания. Система для приведения в движение ковша использует, в ее гидравлической части, мощность теплового двигателя. Снижение скорости двигателя, как правило, является полезным для системы для приведения в движение ковша с точки зрения распределения мощности двигателя, которая прикладывается между системой для приведения в движение ковша и механизмом передачи мощности, выполненным с возможностью передачи мощности теплового двигателя на колеса шасси. На практике отношение бокового давления машины на кучу, когда она вводит ковш в кучу, к усилию, приводящему в движение ковш в направлении копания или опорожнения, имеет тенденцию к снижению при снижении скорости двигателя, что дает преимущество приведению в движение ковша над продвижением машины, и данный результат является желательным, если ковш загружается в куче.
[0015] Согласно одному варианту осуществления настоящего изобретения, система для приведения в движение ковша содержит по меньшей мере одну стрелу, расположенную между шасси и ковшом и оснащенную по меньшей мере одним первый приводом для приведения в движение стрелы относительно шасси и по меньшей мере одним вторым приводом для приведения в движение ковша относительно стрелы между положением копания ковшом и положением опорожнения, причем указанные приводы связаны с гидравлическим насосом, соединенным с тепловым двигателем внутреннего сгорания. Таким образом, насос и приводы образуют гидравлическую часть системы для приведения в движение ковша.
[0016] Согласно одному варианту осуществления настоящего изобретения, система для обнаружения перемещений ковша относительно шасси выполнена с возможностью подачи данных, характеризующих перемещения ковша относительно шасси и/или относительно системы для приведения в движение ковша, на блок управления и содержит по меньшей мере один датчик положения стрелы относительно шасси и один датчик положения ковша относительно стрелы.
Краткое описание чертежей
Настоящее изобретение должно стать хорошо понятно при прочтении нижеследующего описания иллюстративных вариантов осуществления со ссылкой на сопроводительные чертежи, на которых:
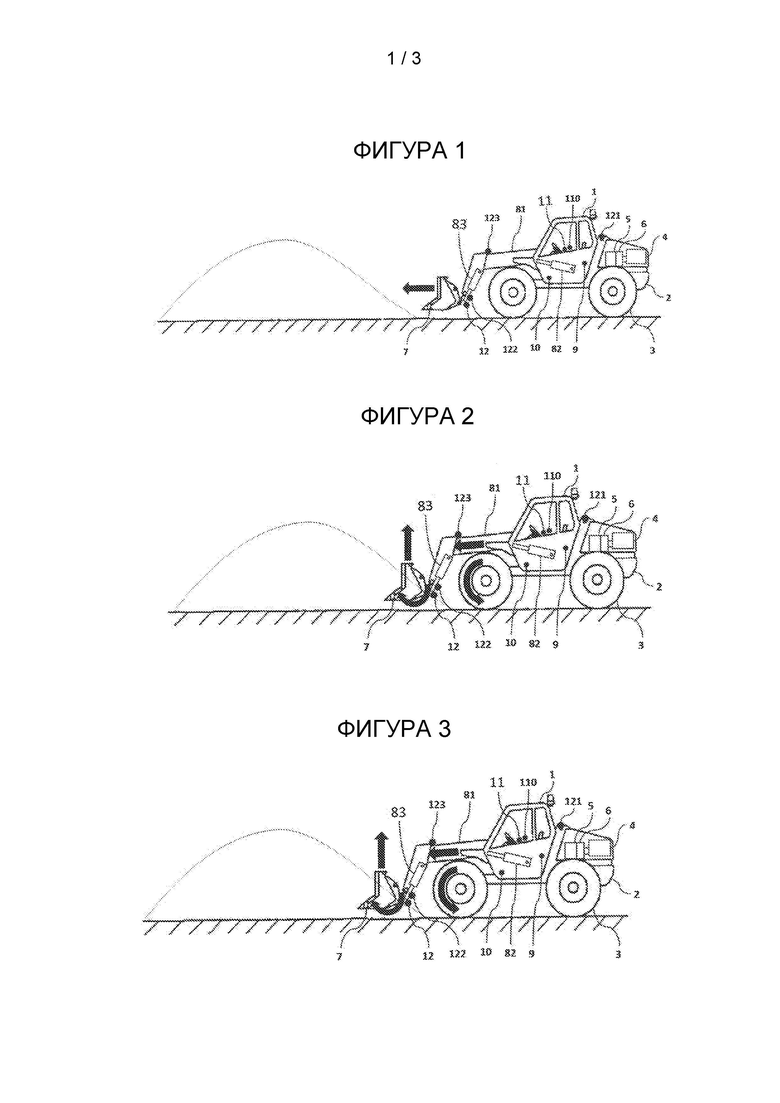
[0017] на Фиг. 1 представлен схематический вид машины для погрузочно-разгрузочных работ согласно настоящему изобретению, готового к введению ковша в кучу сыпучего материала для загрузки ковша машины;
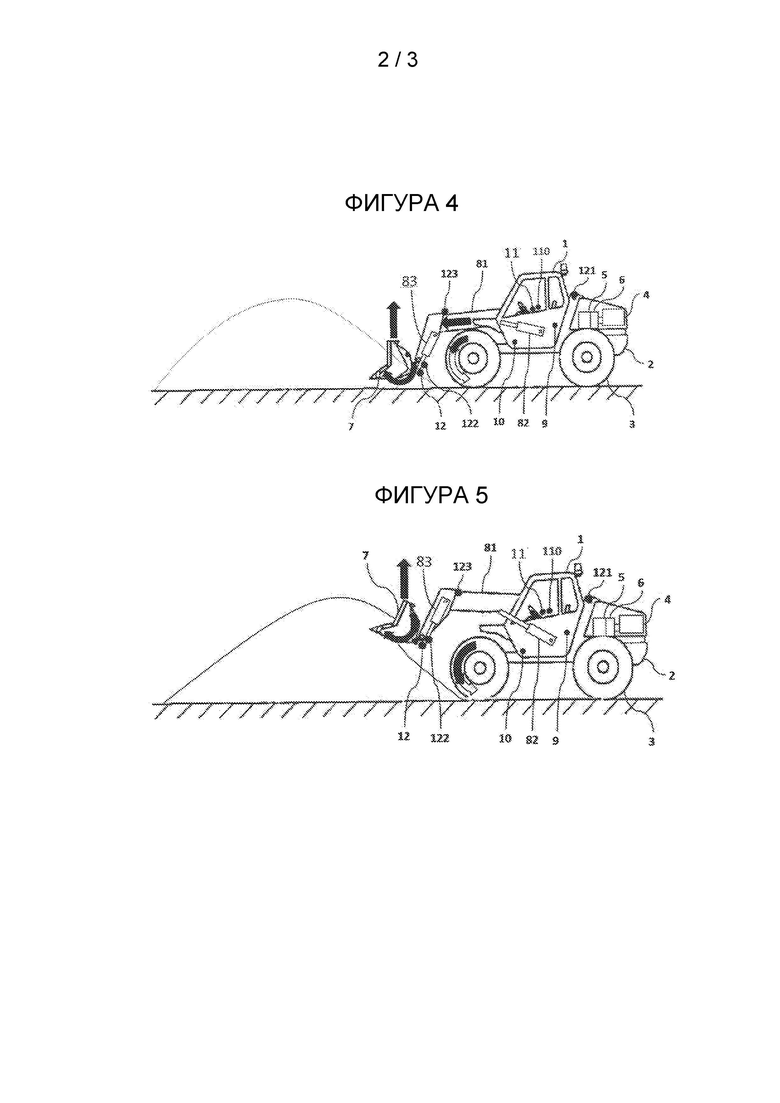
[0018] на Фиг. 2 представлен схематический вид машины для погрузочно-разгрузочных работ согласно настоящему изобретению с ковшом, введенным в кучу сыпучего материала, в состоянии, когда осуществляется управление ковшом машины, чтобы переместить его для загрузки;
[0019] на Фиг. 3 представлен схематический вид машины для погрузочно-разгрузочных работ согласно настоящему изобретению с ковшом, введенным в кучу сыпучего материала, в состоянии, когда осуществляется управление ковшом машины, чтобы переместить его для загрузки, во время этапа сравнения обнаруженных перемещений ковша и команд управления перемещением ковша, задаваемых при управлении;
[0020] на Фиг. 4 представлен схематический вид машины для погрузочно-разгрузочных работ согласно настоящему изобретению с ковшом, введенным в кучу сыпучего материала, в состоянии, когда осуществляется управление ковшом машины, чтобы переместить его для загрузки, во время этапа снижения скорости вращения двигателя для ограничения усилия, прикладываемого к колесам и, следовательно, к ковшу, причем обнаруживаемые перемещения ковша не соответствуют командам управления перемещением;
[0021] на Фиг. 5 представлен схематический вид машины для погрузочно-разгрузочных работ согласно настоящему изобретению с ковшом, введенным в кучу сыпучего материала, в состоянии, когда осуществляется управление ковшом машины, чтобы переместить его для загрузки, во время этапа повышения скорости вращения двигателя для получения скорости вращения двигателя, равной уставке для регулирования скорости, соответствующей положению педали управления дроссельной заслонкой, причем обнаруживаемые перемещения ковша соответствуют командам управления перемещениям; и
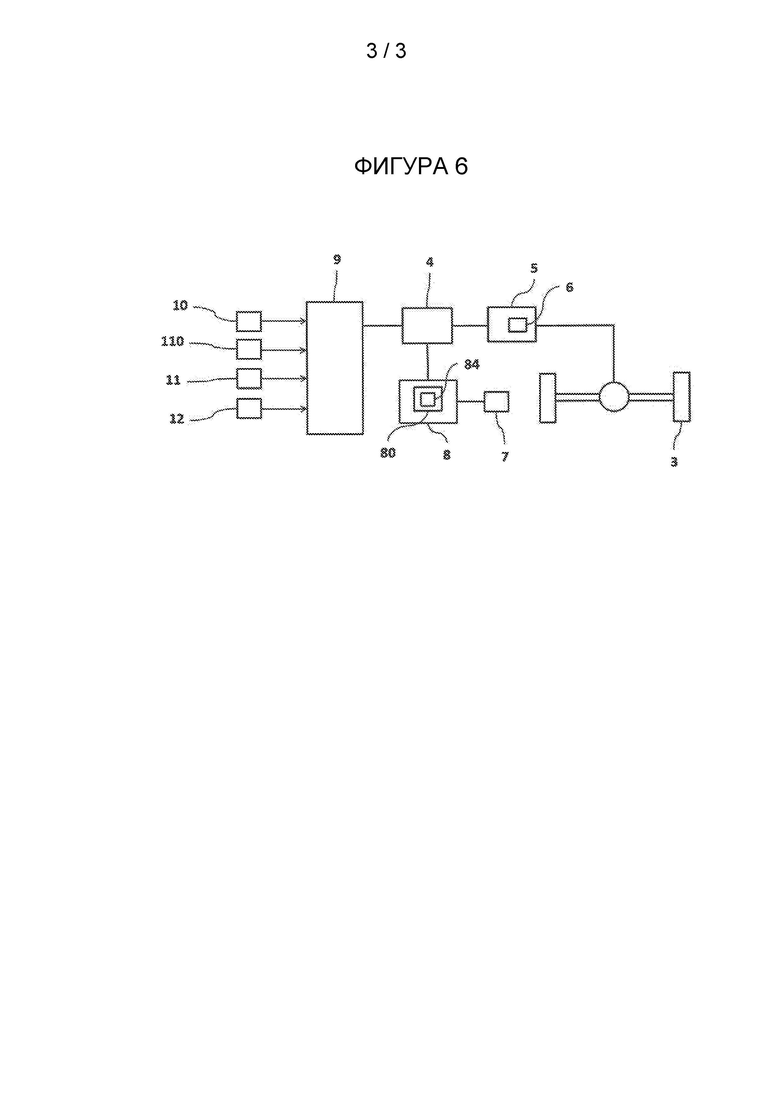
[0022] на Фиг. 6 представлена функциональная схема компонентов машины.
[0023] Как упоминалось выше, задача настоящего изобретения состоит в создании машины 1 для погрузочно-разгрузочных работ с ковшом 7, используемого, главным образом, на рабочих площадках для манипулирования сыпучими материалами, хранящимися в кучах, и их транспортировки, как представлено в указанных примерах.
[0024] Машина 1 содержит колесное шасси 2, оснащенное колесами 3, как правило четырьмя. Это колесное шасси 2 поддерживает кабину оператора, внутри которой может находиться оператор машины. Это колёсное шасси 2 также поддерживает тепловой двигатель 4 внутреннего сгорания и механизм 5 передачи мощности, выполненный с возможностью передачи мощности теплового двигателя 4 на ведущие колеса 3 машины.
[0025] В целом, механизм 5 передачи мощности выполнен таким образом, что снижение скорости вращения теплового двигателя 4 приводит к снижению крутящего момента, прикладываемого к колесам 3 шасси 2. На практике механизм 5 передачи мощности представляет собой гидродинамический механизм передачи мощности, который содержит гидротрансформатор 6 крутящего момента.
[0026] Таким образом, тепловой двигатель 4 на выходе соединен, например, через универсальную шарнирную связь и угловую трансмиссию с гидротрансформатором 6 крутящего момента, который, в свою очередь, связан на выходе через коробку передач с мостом, на концах которого размещены колеса 3 машины 1.
[0027] Гидродинамический гидротрансформатор 6 крутящего момента может состоять из насосного колеса с той стороны, с которой двигатель 4 приводится в действие с помощью вала двигателя, турбинного колеса с выходной стороны и, предпочтительно, кольцевого распределителя между этими двумя колесами.
[0028] Может использоваться гидротрансформатор 6 крутящего момента, такой как поставляемый на рынок под торговой маркой Sachs, модель ZF.
[0029] Колесное шасси 2 также поддерживает систему 8 для приведения в движение ковша 7. Обычно система 8 для приведения в движение ковша 7 содержит гидравлическую часть 80, связанную с тепловым двигателем 4 внутреннего сгорания. В частности, в представленных примерах система 8 для приведения в движение ковша 7 содержит по меньшей мере одну стрелу 81, размещенную между шасси 2 и ковшом 7 и оснащенную по меньшей мере одним первым приводом 82 для приведения в движение стрелы 81 относительно шасси 2 и по меньшей мере одним вторым приводом 83 для приведения в движение ковша 7 относительно стрелы 81 между положением копания ковшом и положением опорожнения, причем указанные приводы 82, 83 связаны с гидравлическим насосом 84, соединенным с тепловым двигателем 4 внутреннего сгорания.
[0030] Гидравлический насос 84 и гидравлические приводы 82 и 83 образуют гидравлическую часть 80 системы 8 для приведения в движение ковша 7.
[0031] В представленных примерах стрела 81 представляет собой поворотную стрелу, установленную с возможностью поворота вокруг горизонтальной оси, параллельной плоскости опоры на грунт машины 1, в конфигурации использования машины 1 для перевода стрелы 4 из низкого положения в высокое положение и наоборот с использованием первого привода 82, такого как цилиндр, размещенного между стрелой 81 и колесным шасси 2. В представленном примере показан один цилиндр двустороннего действия, снабжаемый текучей средой с помощью гидравлического насоса 84. В качестве эквивалентного варианта, может использоваться пара параллельных цилиндров одностороннего действия, снабжаемых текучей средой с помощью гидравлического насоса 84.
[0032] В представленных примерах стрела 81 представляет собой телескопическую стрелу, образованную двумя секциями стрелы, вставленными друг в друга с возможностью скольжения и приводимыми в относительное движение с помощью привода (не представлен) для перевода стрелы из сжатого положения в удлиненное положение и наоборот. В другом варианте стрела 81 может быть не телескопической стрелой.
[0033] Второй привод 83 для приведения в движение ковша 7 размещен либо между стрелой 81 и ковшом 7, либо между держателем ковша 7, которым (держателем) оснащен конец стрелы 81, и ковшом 7.
[0034] Независимо от монтажа, указанный второй привод 83 может, как и в предыдущем случае, присутствовать в виде гидравлического цилиндра двустороннего действия или пары цилиндров одностороннего действия. Приведение в движение ковша 7 с использованием указанного второго привода 83 осуществляется вокруг оси, параллельной горизонтальной оси поворота стрелы 81 относительно шасси 2, чтобы обеспечивалась возможность перевода ковша 7 из положения копания в положение опорожнения и наоборот.
[0035] Машина 1 также содержит поддерживаемые посредством шасси 2 блок 9 управления и орган 11 управления, такой как джойстик, который может приводиться в действие вручную оператором машины.
[0036] Блок 9 управления выполнен с возможностью генерирования управляющих уставок системы 8 для приведения в движение ковша 7 в зависимости от приведения в действия органа 11 управления.
[0037] На практике управление подачей текучей среды на приводы 82, 83 с использованием гидравлического насоса 84 осуществляется в зависимости от управляющих уставок, подаваемых блоком 9 управления. Эти управляющие уставки сами зависят от входных данных, принимаемых блоком 9 управления и являющихся результатом приведения в действие органа 11 управления. Блок 9 содержит, например, микроконтроллер или микропроцессор, соединенные с памятью. Таким образом, если указано, что блок 9 или средства указанного блока 9 выполнены с возможностью выполнения данной операции, то это означает, что указанный блок 9 содержит компьютерные инструкции и соответствующие средства исполнения, которые обеспечивают возможность выполнения указанной операции.
[0038] Как известно, управляющие уставки, подаваемые блоком 9 управления, обычно воздействуют на такие элементы, как распределитель или клапан, размещенные на линии связи между насосом и приводами 82, 83, для обеспечения возможности надлежащей подачи текучей среды на приводы 82, 83
[0039] В представленном примере орган 11 управления, размещенный в кабине оператора, представляет собой рычаг управления, также именуемый джойстиком. Как известно, указанный орган 11 управления, например, оснащен на его основании двумя датчиками положения для обеспечения возможности передачи двух сигналов положения от указанного органа 11 управления на блок 9 управления. Пример такого органа 11 управления описан, например, в патенте FR 2 858 861. Таким образом, указанный орган 11 управления может быть смещен вперед, назад, влево или право относительно машины. Обычно перемещения вперед и назад органа 11 управления управляют перемещением вверх и вниз стрелы 81, в то время как перемещения влево и вправо органа 11 управления управляют поворотным перемещением ковша 7.
[0040] Указанные направления вперед/назад и влево/вправо соответствуют основным направлениям, орган 11 управления может приводиться в действие согласно бесконечному множеству направлений, и перемещение органа 11 управления в любом направлении соответствует комбинированному действию, которое пропорционально положению органа 11 управления относительно указанных основных направлений. Обычно указанный орган 11 управления возвращается под действием пружины в нейтральное положение, то есть в промежуточное положение между правым/левым и передним/задним положениями, когда он находится в состоянии отсутствия воздействия на него.
[0041] Таким образом, информация о положении, передаваемая на блок 9 управления, обычно представляет собой информацию, относящуюся к угловому положению органа 11 управления относительно его нейтрального положения.
[0042] Как упоминалось выше, для обеспечения возможности указанных перемещений стрелы 81 и ковша 7 под действием органа 11 управления, блок 9 управления управляет подачей гидравлической текучей среды на первый и второй приводы 82 и 83 в зависимости от данных о положении, подаваемых с помощью органа 11 управления. Таким образом, каждый из первого и второго приводов, размещенных в гидравлическом контуре, оснащен по меньшей мере одним клапаном или распределителем, которые могут приводиться в действие с помощью блока 9 управления.
[0043] В данном случае блок 9 управления выполнен в виде контроллера или микропроцессора, в которых обеспечены наборы компьютерных инструкций для выполнения функций блока управления. Однако функции блока 9 управления могут также выполняться с помощью специализированных электронных компонентов или компонентов типа ППВМ или специализированной заказной интегральной схемы. Возможно также сочетание вычислительных частей и электронных частей.
[0044] Компьютерные программы или компьютерные инструкции могут храниться в устройствах для хранения программ, например на носителе для хранения цифровых данных, который может считываться с помощью компьютера или исполняемых программ. Указанные программы или инструкции могут также поступать для исполнения от периферийных устройств для хранения программ.
[0045] Обычно блок 9 управления выполнен с возможностью приема сигналов положения, которые передаются на него с помощью органа 11 управления, и с возможностью передачи выходных сигналов на клапаны или распределители, которыми оснащены гидравлические контуры первого и второго приводов, обычно через соленоиды, которыми оснащены указанные клапаны или распределители.
[0046] Первый и второй приводы 82, 83 управляют, в зависимости от подачи на них гидравлического потока, перемещением стрелы в случае первого привода 82 и перемещением ковша в случае второго привода 83.
[0047] Машина 1 также содержит систему 12 для обнаружения перемещений ковша относительно шасси 2 и/или системы 8 для приведения в движение ковша 7, выполненную с возможностью подачи данных, характеризующих перемещения ковша 7 относительно шасси 2 и/или системы 8 для приведения в движение ковша 7, на блок 9 управления.
[0048] В представленных примерах система 12 для обнаружения перемещений ковша 7 содержит по меньшей мере один датчик 121 положения стрелы 81 относительно шасси 2 и один датчик 122 положения ковша 7 относительно стрелы 81. В данном случае указанные датчики положения представляют собой угловые датчики для измерения угла наклона ковша 7 относительно стрелы 81 и угла наклона стрелы 81 относительно плоскости опоры на грунт шасси 2.
[0049] В случае телескопического стрелы 81 может быть также обеспечен датчик 123 для обнаружения сжатия или удлинения телескопической конструкции.
[0050] Все сигналы от указанных датчиков подаются на блок 9 управления, который содержит таймер для обеспечения возможности приема указанных сигналов в зависимости от времени.
[0051] Машина 1 также содержит педаль 10 управления дроссельной заслонкой в кабине оператора. Педаль 10 управления дроссельной заслонкой может быть оснащена датчиком положения, и блок 9 управления может быть выполнен с возможностью генерирования уставок для регулирования скорости вращения теплового двигателя 4 в зависимости от положения педали 10 управления дроссельной заслонкой. Положение педали 10 управления дроссельной заслонкой может быть определено также с помощью датчиков, размещенных в других местах на системе управления дроссельной заслонкой.
[0052] В одном режиме работы машины блок 9 управления выполнен с возможностью -, в зависимости от данных, подаваемых системой 8 для обнаружения перемещений ковша 7 и управляющих уставок системы 8 для приведения в движение ковша 7, - снижения скорости вращения теплового двигателя 4 внутреннего сгорания до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали 10 управления дроссельной заслонкой. Данный режим работы является активируемым/деактивируемым.
[0053] В частности, машина 1 содержит селектор 110 положения по меньшей мере с двумя положениями, а именно положением управления передним ходом и положением управления задним ходом, и орган 11 управления имеет нейтральное положение, причем режим работы, в котором блок 9 управления выполнен с возможностью -, в зависимости от данных, подаваемых системой 12 для обнаружения перемещений ковша 7, и уставок для управления от органа 11 управления, - снижения скорости вращения двигателя 4 до значения, меньшего, чем значение, подаваемое с помощью педали 10 управления дроссельной заслонкой, представляет собой активируемый/деактивируемый режим. Данный режим работы деактивирован, если селектор 110 положения находится в положении управления задним ходом и при этом орган 11 управления находится в нейтральном положении.
[0054] Для активации указанного режима работы, если в машине установлено положение переднего хода, оператор машины 1 должен плавно привести в действие орган управления, такой как ручка или тому подобное, размещенный в кабине оператора.
[0055] Аналогичным образом, селектор 110 положения размещен внутри кабины оператора и может поддерживаться с помощью органа 11 управления в случае, если последний выполнен в виде джойстика.
[0056] Если указанный режим работы находится в активированном состоянии, то скорость вращения двигателя может быть снижена согласно различным условиям, которые могут быть общими или исключительными.
[0057] Как правило, блок 9 управления выполнен с возможностью определения, в зависимости от управляющих уставок системы для приведения в движение ковша 7, по меньшей мере одной так называемой теоретической характеристики перемещения ковша и, в зависимости от данных, подаваемых системой 12 для обнаружения перемещений ковша 7, по меньшей мере одной реальной характеристики перемещения ковша, и, кроме того, блок 9 управления выполнен с возможностью сравнения теоретического и реального значений одной и той же характеристики и с возможностью снижения скорости вращения теплового двигателя до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали управления дроссельной заслонкой, в зависимости от результата сравнения.
[0058] В частности, скорость вращения снижают, если теоретическая и практическая характеристики не согласуются друг с другом, или если теоретическая характеристика имеет меньшее значение, чем реальная характеристика. Характеристика перемещения ковша может быть выбрана из группы характеристик, состоящей из скорости и/или величины перемещения и/или ускорения перемещения ковша, или, в более простом варианте, она может представлять собой отсутствие перемещения ковша при нахождении органа 11 управления в состоянии, в котором он приведен в действие в направлении перемещения ковша. Эти характеристики могут быть общими, а могут и не быть.
[0059] Таким образом, в простейшем варианте блок 9 управления выполнен с возможностью определения, в зависимости от управляющих уставок системы 8 для приведения в движение ковша 7, приведения в действие элемента 11 управления в направлении перемещения ковша 7 и с возможностью определения, в зависимости от данных, подаваемых системой 12 для обнаружения перемещений ковша 7, перемещения или отсутствия перемещения ковша 7, а также блок 9 управления выполнен с возможностью снижения скорости вращения теплового двигателя внутреннего сгорания до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали управления дроссельной заслонкой, при отсутствии перемещения ковша, определяемого блоком управления, если орган 11 управления находится в состоянии, в котором он приведен в действие в направлении перемещения ковша.
[0060] В более сложном варианте блок 9 управления выполнен с возможностью определения, в зависимости от управляющих уставок системы 8 для приведения в движение ковша 7, теоретической величины перемещения ковша при нахождении органа 11 управления в приведенном в действие состоянии, и с возможностью определения, в зависимости от данных, подаваемых системой 12 для обнаружения перемещений ковша, реальной величины перемещения ковша. Блок управления также выполнен с возможностью сравнения теоретического и реального значений величины перемещения ковша 7, и с возможностью снижения скорости вращения теплового двигателя 4 до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали 10 управления дроссельной заслонкой, в зависимости от результата сравнения.
[0061] В частности, блок управления выполнен с возможностью снижения скорости вращения теплового двигателя 4 до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали управления дроссельной заслонкой, если теоретическое значение величины перемещения ковша 7 меньше, чем реальное значение величины перемещения ковша 7.
[0062] В качестве варианта или дополнительно, блок 9 управления выполнен с возможностью определения, в зависимости от управляющих уставок системы 8 для приведения в движение ковша 7, теоретической скорости перемещения ковша 7 при нахождении органа 11 управления в приведенном в действие состоянии, и с возможностью определения, в зависимости от данных, подаваемых системой 12 для обнаружения перемещений ковша 7, реальной скорости перемещения ковша 7. Таким образом, блок 9 управления выполнен с возможностью сравнения теоретического и практического значений скорости перемещения ковша 7 и с возможностью снижения скорости вращения двигателя 4 до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали 10 управления дроссельной заслонкой, в зависимости от результата сравнения.
[0063] В частности, блок управления выполнен с возможностью снижения скорости вращения теплового двигателя 4 до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали 10 управления дроссельной заслонкой, если реальное значение скорости перемещения ковша 7 ниже, чем теоретическое значение скорости перемещения ковша 7.
На практике, работа такой машины 1 предельно проста. Предполагается, что активирован режим работы, в котором блок 9 управления выполнен с возможностью -, в зависимости от данных, подаваемых системой 12 для обнаружения перемещений ковша 7, и от управляющих уставок системы 8 для приведения в движение ковша 7, - снижения скорости вращения теплового двигателя 4 до значение, меньшего, чем значение уставки для регулирования скорости вращения, соответствующей положению педали 10 управления дроссельной заслонкой. Оператор машины нажимает на педаль 10 управления дроссельной заслонкой для обеспечения возможности перемещения машины 1 в направлении кучи сыпучего материала и для обеспечения возможности введения ковша 7 в указанный материал, как показано на Фиг. 1. Оператор машины приводит в действие орган 11 управления в направлении перемещения ковша 7 для управления копанием и опорожнением ковша 7 и/или подъемом или опусканием стрелы 81 и/или удлинением или сжатием телескопической конструкции, при наличии этой телескопической конструкции. С этой целью управляющие уставки передаются на систему 8 для обнаружения перемещений ковша 7. Датчики системы 12 для обнаружения перемещений ковша измеряют наблюдаемые перемещения. Блок 9 управления сравнивает характеристики реального перемещения ковша и теоретические или оценочные характеристики перемещения ковша, связанные с приведением в действие органа 11 управления. Блок 9 управления снижает скорость вращения теплового двигателя 4 до скорости вращения, меньшей, чем управляющая уставка, соответствующая положению педали 10 управления дроссельной заслонкой, если характеристики реального перемещения и теоретического перемещения ковша показывают несоответствие перемещения ковша 7 ожидаемому перемещению. Снижение скорости вращения двигателя обеспечивает возможность ограничения усилия, прикладываемого к колесам машины и, таким образом, возможность ослабления усилия, прикладываемого к ковшу 7. Если перемещение снова совпало с ожидаемым перемещением, то блок 9 управления регулирует скорость вращения двигателя 4 до скорости вращения, соответствующей положению педали 10 управления дроссельной заслонкой. На протяжении всего этого процесса оператор машины удерживает ногу в состоянии нажатия на педаль 10 управления дроссельной заслонкой. Указанные изменения скорости вращения двигателя создаются без вмешательства оператора машины для приложения изменяемого давления к педали 10 управления дроссельной заслонкой. Следовательно, изменение скорости вращения двигателя может обеспечиваться при нажатом состоянии педали 10 управления дроссельной заслонкой, независимо от положения, занимаемого педалью управления дроссельной заслонкой. Очевидно, что приведенный выше пример для сравнения между теоретической скоростью вращения и реальной скоростью вращения может быть аналогичным образом применен к ускорению или даже к величине перемещения ковша, или просто к наличию перемещения ковша при нахождении органа 11 управления в приведенном в действие состоянии.
Изобретение относится к машинам для погрузочно-разгрузочных работ. Технический результат – оптимизация моментов загрузки ковша материалом, хранящимся в куче, при предохранении механических частей и шин машины, и без компромисса по расходу топлива в машине. Машина для погрузочно-разгрузочных работ содержит шасси и поддерживаемые посредством указанного шасси: тепловой двигатель внутреннего сгорания, механизм передачи мощности, выполненный с возможностью передачи мощности теплового двигателя на колеса шасси, ковш, систему для приведения в движение указанного ковша, блок управления, педаль управления дроссельной заслонкой, орган управления, такой как джойстик, который выполнен с возможностью приведения в действие вручную оператором машины, систему для обнаружения перемещений ковша. Механизм передачи мощности выполнен таким образом, что снижение скорости вращения теплового двигателя приводит к снижению крутящего момента, прикладываемого к колесам шасси. Машина имеет по меньшей мере один режим работы, в котором блок управления выполнен с возможностью, в зависимости от данных, подаваемых системой для обнаружения перемещений ковша, и указанных управляющих уставок системы для приведения в движение ковша, снижения скорости вращения теплового двигателя внутреннего сгорания до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали управления дроссельной заслонкой. 9 з.п. ф-лы, 6 ил. 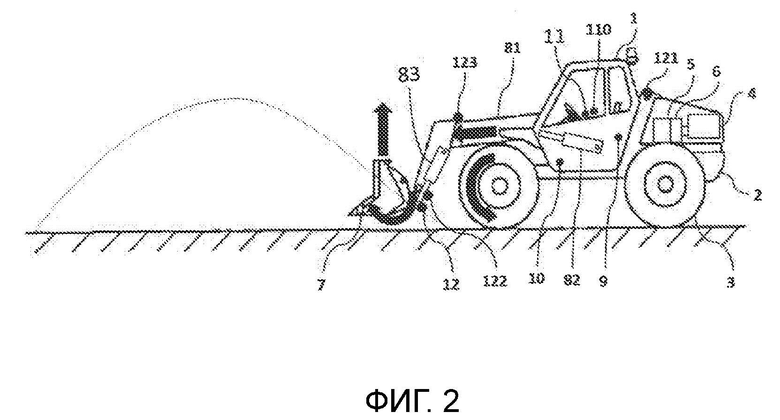
1. Машина (1) для погрузочно-разгрузочных работ, содержащая шасси (2) и поддерживаемые посредством указанного шасси
- тепловой двигатель (4) внутреннего сгорания,
- механизм (5) передачи мощности, выполненный с возможностью передачи мощности теплового двигателя (4) на колеса (3) шасси (2),
- ковш (7),
- систему (8) для приведения в движение указанного ковша (7),
- блок (9) управления,
- педаль (10) управления дроссельной заслонкой, причем блок (9) управления выполнен с возможностью генерирования уставки для регулирования скорости вращения теплового двигателя (4) в зависимости от положения педали (10) управления дроссельной заслонкой,
- орган (11) управления, такой как джойстик, который выполнен с возможностью приведения в действие вручную оператором машины, причем блок (9) управления выполнен с возможностью генерирования управляющих уставок системы (8) для приведения в движение ковша (7) в зависимости от приведения в действие органа (11) управления,
- систему (12) для обнаружения перемещений ковша (7) относительно шасси (2) и/или системы (8) для приведения в движение ковша (7), выполненную с возможностью подачи данных, характеризующих перемещения ковша (7) относительно шасси (2) и/или системы (8) для приведения в движение ковша (7), на блок (9) управления,
отличающаяся тем, что
механизм (5) передачи мощности выполнен таким образом, что снижение скорости вращения теплового двигателя (4) приводит к снижению крутящего момента, прикладываемого к колесам (3) шасси (2), и тем, что
машина (1) имеет по меньшей мере один режим работы, в котором блок (9) управления выполнен с возможностью, в зависимости от данных, подаваемых системой (12) для обнаружения перемещений ковша (7), и указанных управляющих уставок системы (8) для приведения в движение ковша (7), снижения скорости вращения теплового двигателя (4) внутреннего сгорания до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали (10) управления дроссельной заслонкой.
2. Машина (1) для погрузочно-разгрузочных работ по п. 1, отличающаяся тем, что
блок (9) управления выполнен с возможностью определения, в зависимости от управляющих уставок системы (8) для приведения в движение ковша (7), приведения в действие органа (11) управления в направлении перемещения ковша (7) и с возможностью определения, в зависимости от данных, подаваемых системой (12) для обнаружения перемещений ковша (7), перемещения или отсутствия перемещения ковша (7), и тем, что
блок (9) управления выполнен с возможностью снижения скорости вращения теплового двигателя внутреннего сгорания до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали управления дроссельной заслонкой, когда блоком управления определено отсутствие перемещения ковша (7), и при этом орган (11) управления находится в состоянии, в котором он приведен в действие в направлении перемещения ковша (7).
3. Машина (1) для погрузочно-разгрузочных работ по одному из пп. 1 или 2, отличающаяся тем, что
блок (9) управления выполнен с возможностью определения, в зависимости от управляющих уставок системы (8) для приведения в движение ковша (7), теоретической величины перемещения ковша (7) при нахождении органа (11) управления в приведенном в действие состоянии, и с возможностью определения, в зависимости от данных, подаваемых системой (12) для обнаружения перемещений ковша (7), реальной величины перемещения ковша (7), и тем, что
блок (9) управления выполнен с возможностью сравнения теоретического и реального значений величины перемещения ковша (7) и с возможностью снижения скорости вращения теплового двигателя (4) до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали (10) управления дроссельной заслонкой, в зависимости от результата сравнения.
4. Машина (1) для погрузочно-разгрузочных работ по одному из предыдущих пунктов, отличающаяся тем, что
блок (9) управления выполнен с возможностью определения, в зависимости от управляющих уставок системы (8) для приведения в движение ковша (7), теоретической скорости перемещения ковша (7) при нахождении органа (11) управления в приведенном в действие состоянии, и определения в виде функции от данных, поданных системой (12) для обнаружения перемещений ковша (7), реальной скорости перемещения ковша (7), и тем, что
блок (9) управления выполнен с возможностью сравнения теоретического и реального значений скорости перемещения ковша (7) и с возможностью снижения скорости вращения теплового двигателя (4) до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали (10) управления дроссельной заслонкой, в зависимости от результата сравнения.
5. Машина (1) для погрузочно-разгрузочных работ по одному из предыдущих пунктов, отличающаяся тем, что
блок (9) управления выполнен с возможностью определения, в зависимости от управляющих уставок системы (8) для приведения в движение ковша (7), теоретического ускорения перемещения ковша (7) при нахождении органа (11) управления в приведенном в действие состоянии, и с возможностью определения, в зависимости от данных, подаваемых системой (12) для обнаружения перемещений ковша (7), реального ускорения перемещения ковша (7), и тем, что
блок (9) управления выполнен с возможностью сравнения теоретического и реального значений ускорения перемещения ковша (7) и с возможностью снижения скорости вращения теплового двигателя (4) до значения, меньшего, чем значение уставки для регулирования скорости вращения, соответствующее положению педали (10) управления дроссельной заслонкой, в зависимости от результата сравнения.
6. Машина (1) для погрузочно-разгрузочных работ по одному из предыдущих пунктов, отличающаяся тем, что механизм (5) передачи мощности представляет собой гидродинамический механизм передачи мощности, который содержит гидротрансформатор (6) крутящего момента.
7. Машина (1) для погрузочно-разгрузочных работ по одному из предыдущих пунктов, отличающаяся тем, что
машина (1) содержит селектор (110) положения по меньшей мере с двумя положениями, а именно положением управления передним ходом и положением управления задним ходом, тем, что орган (11) управления имеет нейтральное положение, и тем, что
режим работы, в котором блок (9) управления выполнен с возможностью, в зависимости от данных, подаваемых системой (12) для обнаружения перемещений ковша (7), и управляющих уставок системы (8) для приведения в движение ковша (7), снижения скорости вращения теплового двигателя (4) до значения, меньшего, чем значение, задаваемое с помощью педали (10) управления дроссельной заслонкой, представляет собой активируемый/деактивируемый режим, и указанный режим работы деактивирован, если селектор (110) положения находится в положении управления задним ходом, и при этом орган (11) управления находится в нейтральном положении.
8. Машина (1) для погрузочно-разгрузочных работ по одному из пп. 1-7, отличающаяся тем, что система (8) для приведения в движение ковша (7) содержит гидравлическую часть (80), связанную с тепловым двигателем (4) внутреннего сгорания.
9. Машина (1) для погрузочно-разгрузочных работ по одному из предыдущих пунктов, отличающаяся тем, что
система (8) для приведения в движение ковша (7) содержит по меньшей мере одну стрелу (81), размещенную между шасси (2) и ковшом (7) и оснащенную по меньшей мере одним первым приводом (82) для приведения в движение стрелы (81) относительно шасси (2) и по меньшей мере одним вторым приводом (83) для приведения в движение ковша (7) относительно стрелы (81) между положением копания ковшом и положением его опорожнения,
причем указанные приводы (82, 83) связаны с гидравлическим насосом (84), соединенным с тепловым двигателем (4) внутреннего сгорания.
10. Машина (1) для погрузочно-разгрузочных работ по одному из предыдущих пунктов, отличающаяся тем, что система (12) для обнаружения перемещений ковша (7) относительно шасси (2) выполнена с возможностью подачи данных, характеризующих перемещения ковша (7) относительно шасси (2) и/или относительно системы (8) для приведения в движение ковша (7), на блок (9) управления, содержит по меньшей мере один датчки (121) положения стрелы (81) относительно шасси (2) и один датчик (122) положения ковша (7) относительно стрелы (81).
| Колосоуборка | 1923 |
|
SU2009A1 |
| Фронтальный погрузчик | 1984 |
|
SU1180464A1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ РАБОЧЕЙ МАШИНОЙ | 2008 |
|
RU2490397C2 |
| РЕГУЛИРОВКА КРУТЯЩЕГО МОМЕНТА ДЛЯ ПРИВОДА НА ПЕРЕДНИЕ КОЛЕСА | 2013 |
|
RU2642204C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2014 |
|
RU2673497C2 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| EP 3342936 A1, 04.07.2018 | |||
| EP 3358087 A1, 08.08.2018. | |||

