Изобретение относится к области машиностроения, в частности к робототехнике, в которой широко используются пространственные манипуляционные механизмы параллельной структуры, обладающие высокой степенью свободы и обеспечивающие точное позиционирование различных объектов, и для решения прочих задач вне агрессивной внешней среды, в которой расположено основание механизма.
Известен механизм параллельной структуры с шестью степенями свободы, содержащий основание и конечное звено в виде платформ; шесть кинематических звеньев, каждое из которых является телескопическим линейным приводом, и на концах шарнирно сопряженных с основанием и конечным звеном. При этом, шарниры попарно установлены в трех точках на основании и конечном звене. Такой механизм имеет название «платформа Гауфа (Gough platform (1947))», а такая схема параллельной структуры называется гексаподом. [Merlet J.P. Parallel Robots J.P. Merlet Second Edition -Published by Springer, 2006 - pp. 5-7 Fidure 1.3].
Недостатком указанного прототипа является то, что если основание расположено в агрессивной среде, а конечное звено должно совершать сложные манипуляционные действия вне агрессивных условий, то телескопические линейные двигатели будут работать в агрессивной среде, что влечет усложнение и удорожание конструкции линейных телескопических приводов.
Целью изобретения является повышение защищенности и сроков эксплуатации приводов механизмов параллельной структуры с одновременным расширением функциональных возможностей, путем повышения технической и эксплуатационной эффективности устройств манипуляторов. В предлагаемом механизме параллельной структуры с шестью степенями свободы, управление и передача движения от привода к выходному звену осуществляется в каждой цепи в отдельности, и при этом, выходному звену придается сложное манипуляционное перемещение в рабочем пространстве. Расширяются эксплуатационные возможности, установленных на выходном звене инструментов и приспособлений, в том числе и за счет увеличения возможных мест расположения инструментов и приспособлений, без увеличения габаритов выходного звена.
Поставленная цель достигается за счет того, что в предложенном механизме параллельной структуры с шестью степенями свободы, который включает в себя основание, выходное звено и шесть кинематических цепей, каждая из которых, состоит из: прямолинейного промежуточного звена, которое одним концом сопряжена шарнирно с основанием в виде замкнутого кольца или сплошной платформы; другим концом сопрягается с шарниром на управляемом линейном приводе, каждый из которых расположен на шести направляющих с внешней стороны, цилиндрической поверхности выходного звена; направляющие являются частью конструкции выходного звена, и по концам соединены двумя замкнутыми кольцами в единую конструкцию конечного звена цилиндрической формы.
Управление всеми шестью приводами в отдельности или при одновременном управлении позволяет придавать выходному звену сложное шести степенное движение в рабочей зоне манипулятора.
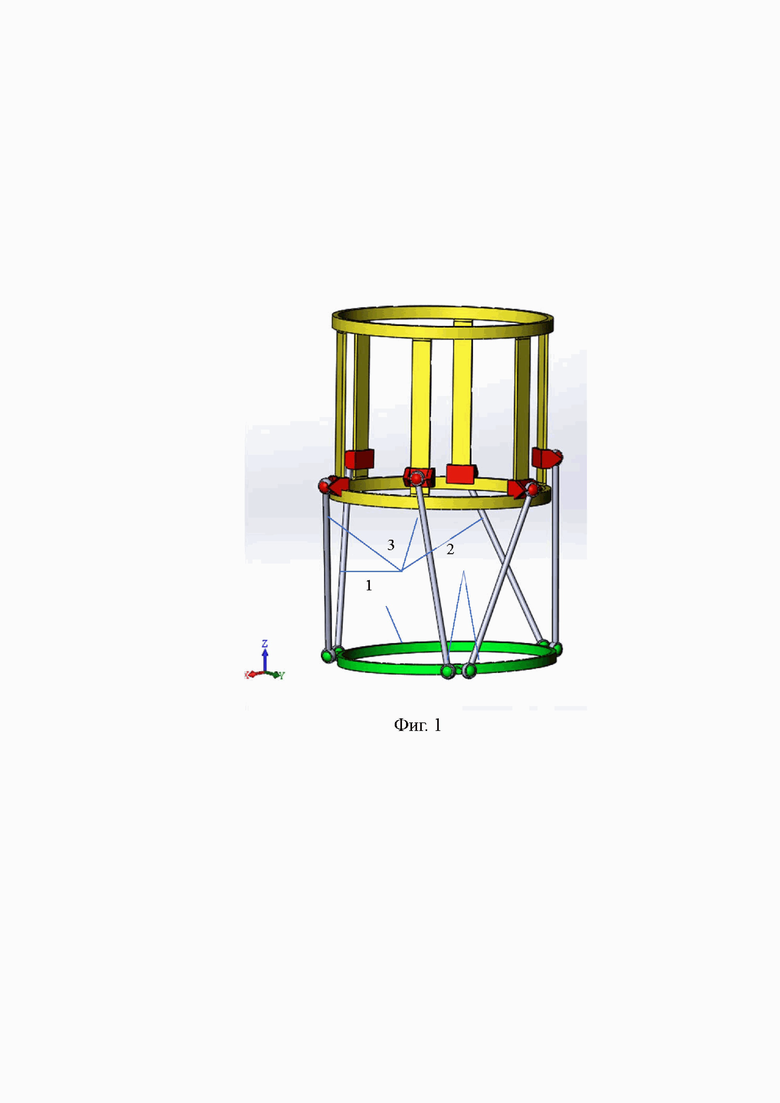
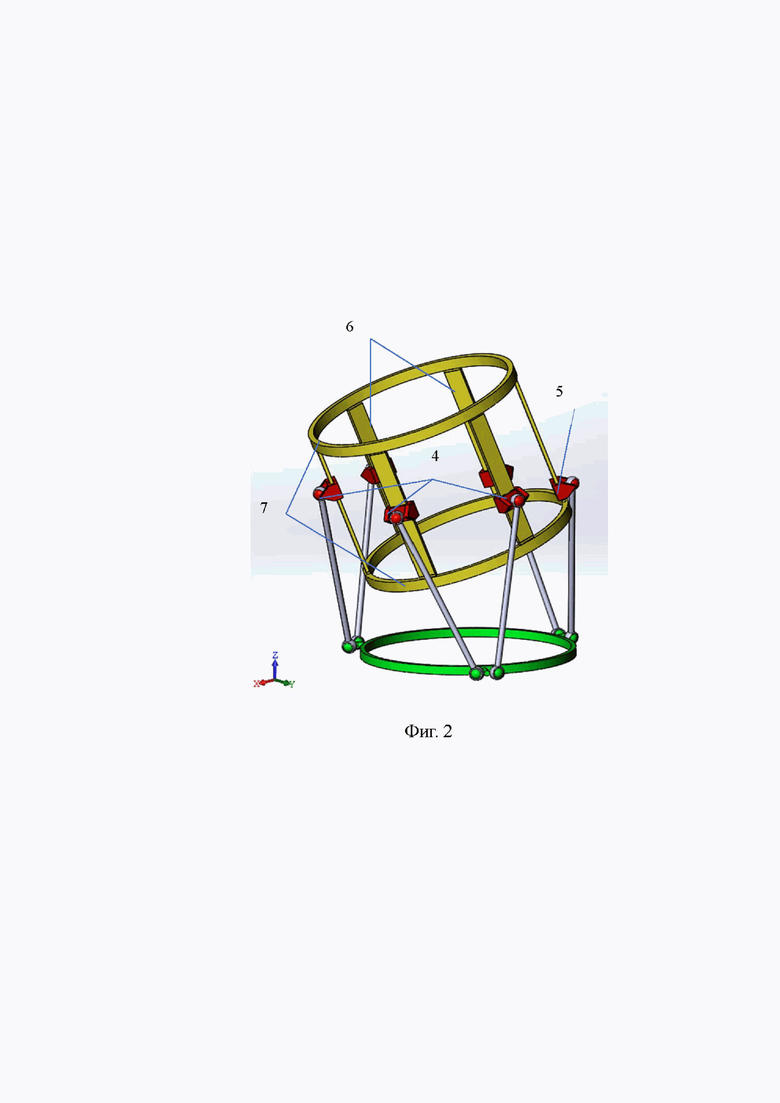
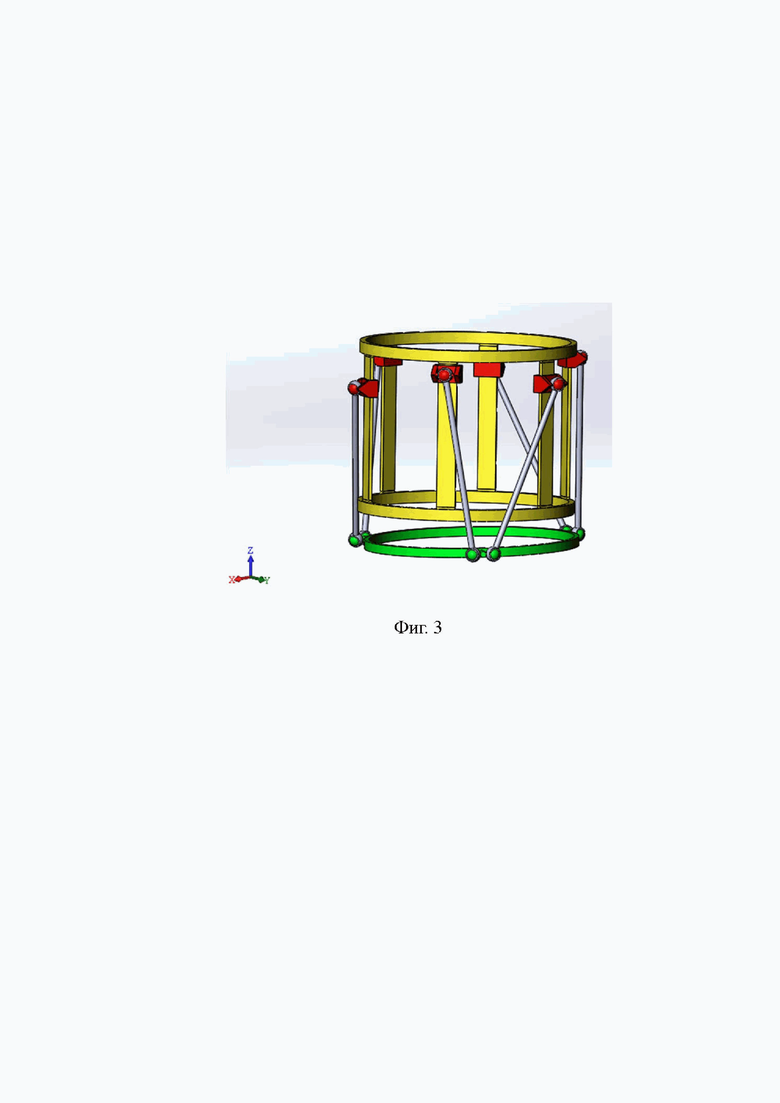
Изобретение представлено соответствующей иллюстрацией. На фиг.1-3 изображена принципиальная кинематическая схема при различных позициях управляемых линейных двигателей на шести направляющих, расположенных на конечном звене.
Механизм параллельной структуры с шестью степенями свободы, включает в себя: основание в виде замкнутого кольца 1, с шестью шарнирами 2, закрепленных попарно в трех точках на основании, с которыми сопряжены промежуточные прямолинейные звенья 3, которые другим концом сопряжены с шарнирами 4, установленными на управляемых линейных приводах 5, которые перемещаются по шести направляющим 6, соединенных по концам двумя неразъемными кольцами 7 в единую цилиндрическую конструкцию конечного звена.
Механизм параллельной структуры работает следующим образом. Рабочая зона манипулятора определяется перемещением линейных приводов 4 по направляющим 6, образующих цилиндрическую поверхность. Совместное действие линейных приводов позволяет осуществлять сложное перемещение конечного звена цилиндрической формы, и соответственно рабочего инструмента и приспособлений, расположенных на неразъемных кольцах 7; и/или позволяет удерживать конструкции, в том числе, и внутри цилиндрической поверхности рабочего звена и кольцевого основания. Сложное движение конечного звена цилиндрической формы оценивается как шесть степеней свободы.
Практическое использование этого механизма возможно в разных областях техники при различных внешних условиях в сочетании с разной номенклатурой инструментов и приспособлений, которые размещены, как на неразъемных кольцах рабочего звена, так и на неразъемном кольце или платформе основания. Механизм способен манипулировать и позиционировать объемные конструкции разного профиля.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2525466C1 |
| СТАТИЧЕСКИ СБАЛАНСИРОВАННОЕ МАНИПУЛЯЦИОННОЕ УСТРОЙСТВО ДЛЯ ЛАЗЕРНЫХ ТЕХНОЛОГИЙ | 2024 |
|
RU2829905C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С КРУГОВЫМ РЫЧАЖНЫМ ОСНОВАНИЕМ | 2017 |
|
RU2667236C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ СКЛАДЫВАЮЩИЙСЯ МАНИПУЛЯТОР | 2021 |
|
RU2759552C1 |
| Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы | 2023 |
|
RU2818704C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2674370C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2534675C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2800735C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
Изобретение относится к области машиностроения, в частности к робототехнике. Механизм включает основание, выходное звено и шесть кинематических цепей. Каждая кинематическая цепь состоит из прямолинейного промежуточного звена, которое одним концом сопряжено шарнирно с основанием в виде замкнутого кольца или сплошной платформы, а другим концом сопряжено с шарниром на управляемом линейном приводе, каждый из которых расположен на шести направляющих с внешней стороны образованной цилиндрической поверхности конечного звена. Направляющие являются частью конструкции выходного звена и по концам соединены двумя замкнутыми кольцами в единое конечное звено цилиндрической формы. Изобретение обеспечивает расширение эксплуатационных возможностей установленных на выходном звене инструментов и приспособлений без увеличения габаритов выходного звена. 3 ил.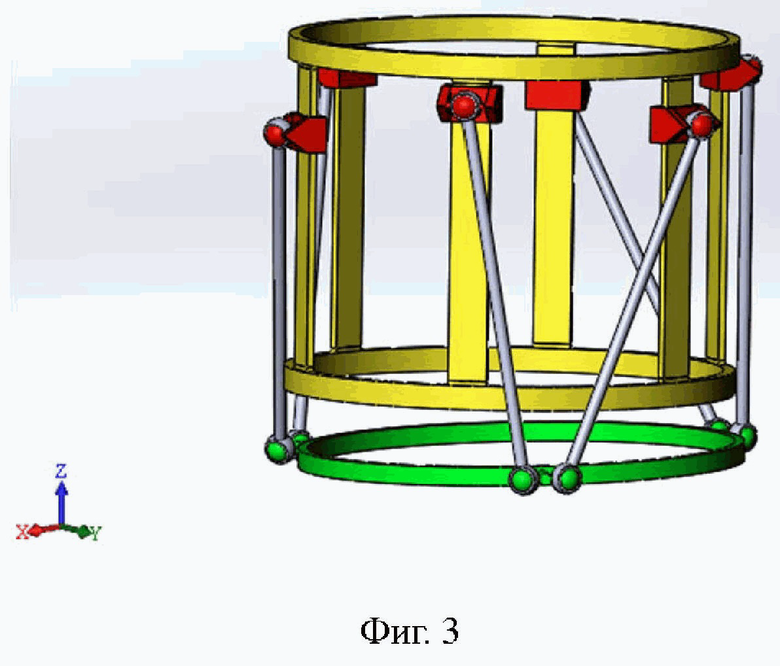
Механизм параллельной структуры с шестью степенями свободы, включающий основание, выходное звено и шесть кинематических цепей, отличающийся тем, что каждая кинематическая цепь, которая состоит из прямолинейного промежуточного звена, которое одним концом сопряжено шарнирно с основанием в виде замкнутого кольца или сплошной платформы, другим концом сопряжено с шарниром на управляемом линейном приводе, каждый из которых расположен на шести направляющих с внешней стороны образованной цилиндрической поверхности конечного звена, направляющие являются частью конструкции выходного звена и по концам соединены двумя замкнутыми кольцами в единое конечное звено цилиндрической формы.
| 0 |
|
SU202579A1 | |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С КРУГОВЫМ РЫЧАЖНЫМ ОСНОВАНИЕМ | 2017 |
|
RU2667236C1 |
| Выпрямительное устройство | 1929 |
|
SU20222A1 |
| KR 20030085779 A, 07.11.2003 | |||
| US 4976582 A1, 11.12.1990 | |||
| COULOMBE Jonathan et al., A New Rotary Hexapod for Micropositioning | |||
| IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, May 6-10, 2013, pp | |||
| Инжектор | 1914 |
|
SU869A1 |

