Изобретение относится к машиностроению, в частности к механическим преобразующим устройствам энергетических машин в виде двигателей, компрессоров или электрогенераторов и может найти применение в приводах машин с двумя соосно установленными выходными валами рабочих органов, например, в виде привода двух соосно установленных тяговых винтов вертолета или платформенного беспилотного летательного аппарата или привода гребных винтов корабля.
Известен роторно-поршневой двигатель Ванкеля, в котором преобразующее устройство выполнено в виде планетарного зубчатого механизма с неподвижным центральным колесом в зацеплении с сателлитом с внутренними зубьями, который сблокирован с треугольным поршнем и установлен внутри цилиндра, профиль которого выполнен по очень сложной кривой в виде эпитрохоиды (книга А.Ф. Крайнев «Словарь-справочник по механизмам» - Москва, Машиностроение, 1987, с. 40, схема двигателя Ванкеля) - аналог.
Недостатками известного двигателя Ванкеля являются:
1) Сложность конструкции и трудоемкость изготовления кривых профилей поршня и цилиндра.
2) Ограниченная мощность из-за возможности установки только одного поршня.
3) До сих пор не решена проблема уплотнения острых кромок поршня в цилиндре.
4) Ограниченные эксплуатационные характеристики из-за возможности установки в этот двигатель только одного сателлита-поршня и привода только одного выходного вала.
Наиболее близким к предлагаемому изобретению является многопоршневой кулачковый двигатель Ферчайльда, в котором преобразующее устройство выполнено в виде установленного на выходном валу симметричного кулачка с четыремя точечными высшими кинематическими парами и ромбическим шарнирным четырехзвенником, на всех четырех вершинах которого установлены круглые ролики, передающие усилия от поршней на кулачок выходного вала (книга С.Н. Кожевников «Теория механизмов и машин» - Москва, Машиностроение, 1973, издание четвертое, стр. 58, схема на рис. 1.22) - прототип.
Недостатками указанного многопоршневого кулачкового двигателя Ферчайльда являются:
1) Сложность конструкции, большие габариты двигателя и трудоемкость изготовления профиля кулачка.
2) Низкая нагрузочная способность точечных кинематических пар кулачка.
3) Ограниченные эксплуатационные возможности из-за привода только одного выходного вала с одним рабочим органом, что не позволяет применить данный двигатель в приводах мощных машин с двумя выходными рабочими органами (например, в приводе вертолетов с двумя соосно расположенными тяговыми винтами).
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции устройства, снижении габаритов двигателя и трудоемкости его изготовления, повышении нагрузочной способности и расширении эксплуатационных возможностей привода двух соосно установленных и противоположно вращающихся выходных валов с разными рабочими органами.
Получение технического результата достигается за счет того, что преобразующее устройство многопоршневого двигателя выполнено в виде сборки двух соосно установленных между собой на стойке трехшарнирных кривошипных двухплечих рычагов, которые пересекаются между собой и со стойкой в одной общей точке и в каждом из которых все три шарнира расположены на одной прямой линии, а упомянутые кривошипные двухплечие рычаги соединены с каждым из поршней двумя симметрично установленными относительно стойки шатунами одинаковой длины, попарно соединенными с каждым из поршней через двойной цилиндрический шарнир.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3 и фиг. 4.
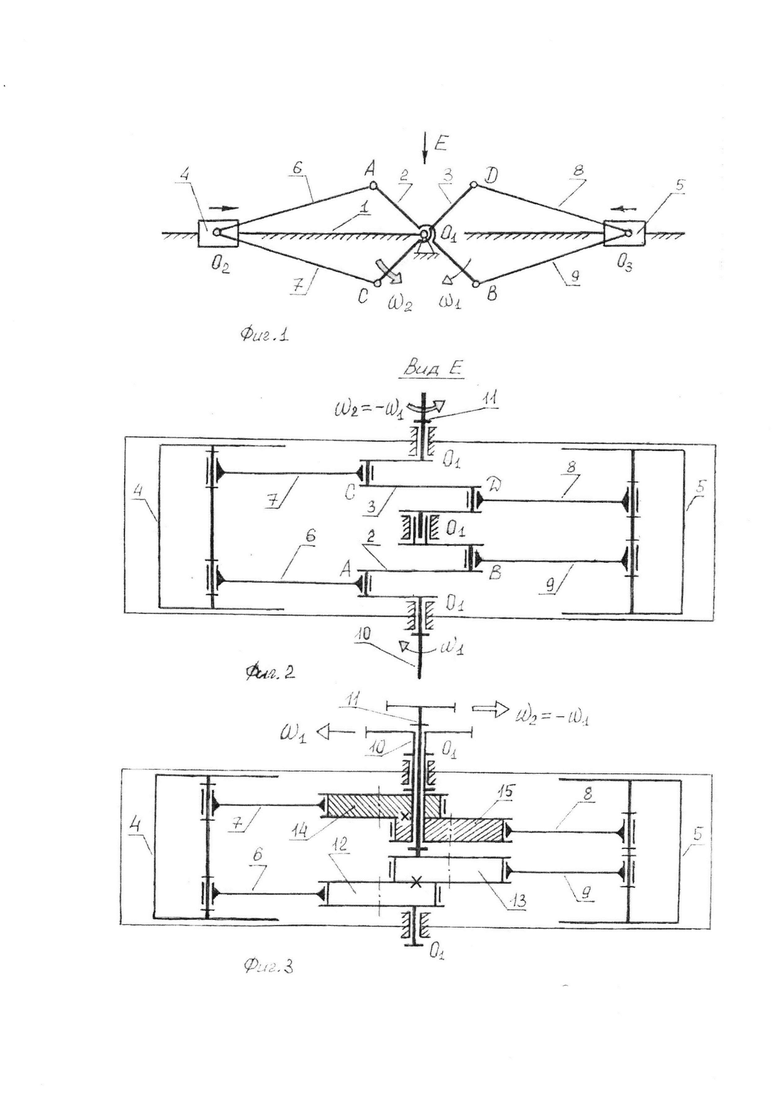
На фиг. 1 изображен общий вид многопоршневого двигателя, в котором преобразующее устройство выполнено в виде сборки двух соосно установленных между собой на стойке 1 трехшарнирных кривошипных двухплечих рычагов 2 и 3, в каждом из которых все три шарнира A, O1, В (на рычаге 2) и С, O1, D (на рычаге 3) расположены на одной прямой линии АО1В (рычаг 2) и на одной прямой линии CO1D (рычаг 3). Кривошипные двухплечие рычаги 2 и 3 при сборке замкнутой кинематической цепи пересекаются между собой и со стойкой 1 в одной общей точке O1, а также соединены с каждым из двух поршней 4 и 5 двумя симметрично установленными относительно стойки 1 шатунами 6 и 7 одинаковой длины (AO2=CO2) и шатунами 8 и 9 одинаковой длины (BO3=DO3). Шатуны 6 и 7 с одной стороны соединены с поршнем 4 через двойной цилиндрический шарнир O2, а с другой стороны соединены с кривошипными двухплечими рычагами 2 и 3 через однократные цилиндрические шарниры A и С с параллельными осями вращения. Шатуны 8 и 9 с одной стороны соединены с поршнем 5 через двойной цилиндрический шарнир O3, ас другой стороны соединены с кривошипными двухплечими рычагами 2 и 3 через однократные цилиндрические шарниры В и D с параллельными осями вращения. Поршни 4 и 5 расположены на одной направляющей O2O1O3, проходящей через центр вращения O1 обоих кривошипных двухплечих рычагов 2 и 3.
Длина каждого из попарно установленных шатунов 6 и 7, 8 и 9 выполнена больше длины каждого из соединяемых с ними кривошипных двухплечих рычагов 2 и 3 (например, выполняется неравенство: [AO2=СО2=BO3=DO3]>[АВ=CD].
На фиг. 2 представлен вариант выполнения многопоршневого двигателя с двумя поршнями 4 и 5 (вид Е на фиг. 1), где кривошипный двухплечий рычаг 2 соединен с отдельно вращающимся выходным валом 10 с угловой скоростью ω1 в одну сторону. Другой кривошипный двухплечий рычаг 3 соединен с другим выходным валом 11, но вращающимся в другую сторону с такой же по величине угловой скоростью ω2=-ω1. Оба раздельно вращающихся выходных вала 10 и 11 установлены по разные стороны от плоскости движения поршней 4 и 5 и выполнены с возможностью противовращения между собой.
На фиг. 3 представлен вариант конструктивного выполнения каждого из кривошипных двухплечих рычагов (на фиг. 2 и фиг. З шарнирно соединенных с поршнями 4 и 5 шатунами 6 и 9, 7 и 8) - в виде двух круглых эксцентриков 12 и 13, 14 и 15, которые попарно сблокированы между собой в противофазе с их относительным угловым сдвигом на 180 градусов вокруг оси их вращения О1. Оба раздельно вращающихся выходных вала 10 и 11 установлены по одну сторону от плоскости движения поршней 4 и 5 и выполнены с возможностью противовращения между собой с угловыми скоростями ω2=-ω1. Сблокированные эксцентрики 12 и 13 соединены с выходным валом 11, а сблокированные эксцентрики 14 и 15 соединены с выходным валом 10.
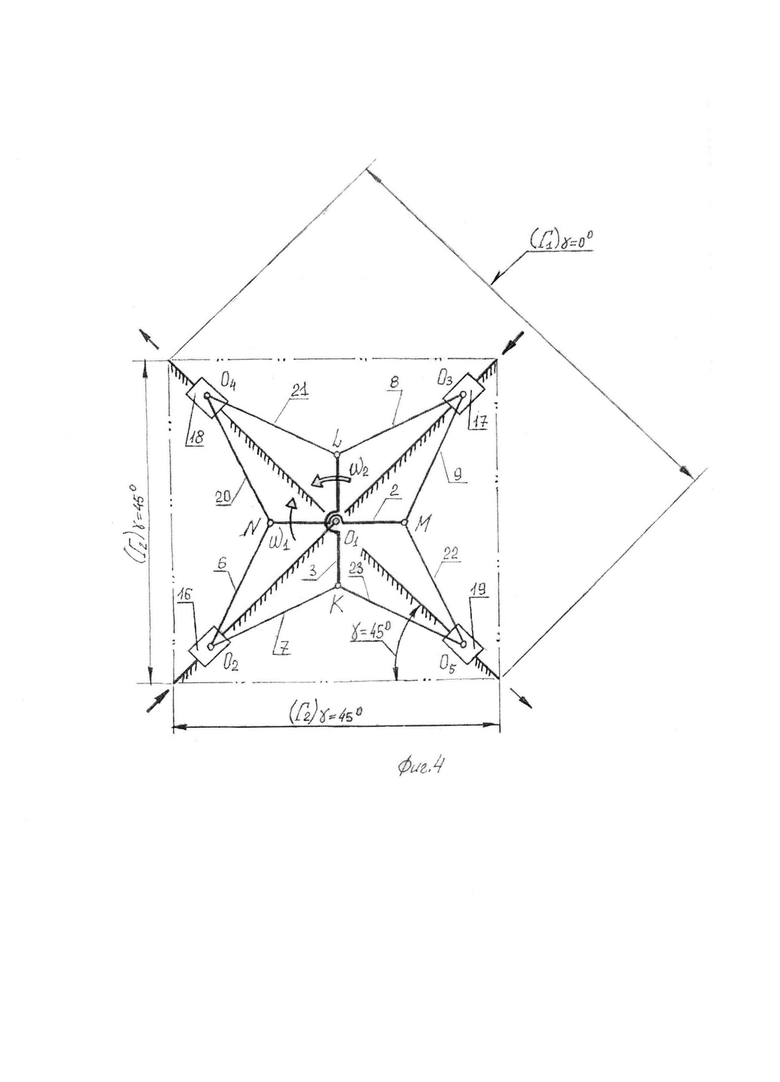
На фиг. 4 представлен вариант выполнения многопоршневого двигателя с четырьмя поршнями 16, 17, 18 и 19, которые попарно расположены на двух взаимно-перпендикулярных направляющих O2O3 и О4О5, пересекающихся между собой в точке, совмещенной с центром O1 вращения обоих кривошипных двухплечих рычагов 2 и 3, которые соединены с шатунами 6, 7, 8, 9, 20, 21, 22 и 23 через двойные цилиндрические шарниры K, L, M, N с параллельными осями вращения. Упомянутые направляющие поршней O2O3 и O4O5 расположены к горизонтали под углом γ=360/2k, который для 4-х поршневого двигателя (k=4) равен: γ=360/2k=360/2*4=45° и при которых габариты двигателя (Г) снижаются (фиг.) в 1,5 раза (так согласно чертежа на фиг. габарит Г2 при γ=45° будет меньше Г1 при γ=0°): (Г1)γ=0°/(Г2)γ=45°=(1/cos γ)=(1/cos 45°)=(1/0,7)=1,5 раза.
Работа представленного на фиг. 1, фиг. 2, фиг. 3 и фиг. 4 многопоршневого двигателя заключается в следующем.
Возврато-поступательное движение поршней по направляющим O2O3 и O4O5 посредством шатунов 6 и 7, а также 8 и 9 преобразуется во вращение в противоположных направлениях с угловыми скоростями ω2=ω1 кривошипных двухплечих рычагов 2 и 3 и соответственно соединенных с ними выходных валов 10 и 11.
Достигаемый в предлагаемом многопоршневом двигателя технический эффект заключается в следующем.
1. Упрощение конструкции и снижении в 1,5 раза габаритов многопоршневого, например, четырехпоршневого двигателя.
2. Снижение трудоемкости изготовления и нагрузочной способности преобразующего устройства на основе применения простых цилиндрических шарниров с параллельными осями вращения.
3. Расширение эксплуатационных возможностей привода от одного двигателя двух разных рабочих органов без применения сложных зубчатых колес.
4. Устраняется боковое давление поршней на их направляющие (и их износ) за счет симметричной установки их шатунов относительно стойки.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОРШНЕВОЙ РЫЧАЖНЫЙ МЕХАНИЗМ | 2020 |
|
RU2751012C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2021 |
|
RU2765386C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| Многопоршневой двигатель | 2023 |
|
RU2812540C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2758377C1 |
Изобретение относится к машиностроению. Многопоршневой двигатель содержит механическое преобразующее устройство со стойкой для преобразования возвратно-поступательного движения поршней во вращательное движение выходного вала. Преобразующее устройство выполнено в виде сборки двух соосно установленных между собой на стойке (1) трехшарнирных кривошипных двуплечих рычагов (2, 3), которые пересекаются между собой и со стойкой (1) в одной общей точке и в каждом из которых все три шарнира расположены на одной прямой линии. Кривошипные двуплечие рычаги (2, 3) соединены с каждым из поршней (4, 5) двумя симметрично установленными относительно стойки (1) шатунами (6, 7) одинаковой длины, попарно соединенными с каждым из поршней через двойной цилиндрический шарнир. Технический результат заключается в упрощении конструкции устройства, снижении габаритов двигателя и трудоемкости его изготовления, повышении нагрузочной способности и расширении эксплуатационных возможностей привода двух соосно установленных и противоположно вращающихся выходных валов с разными рабочими органами. 5 з.п. ф-лы, 4 ил.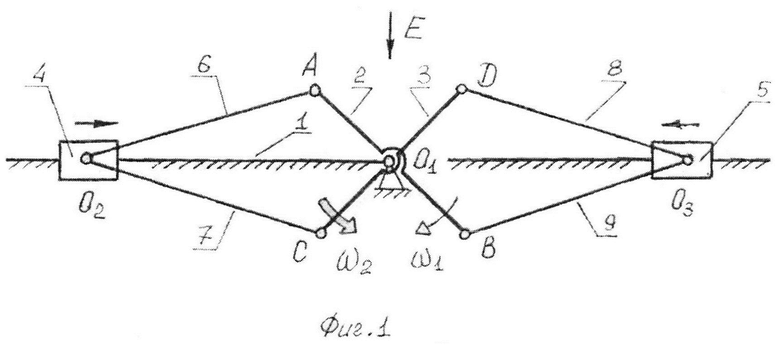
1. Многопоршневой двигатель, содержащий механическое преобразующее устройство со стойкой для преобразования возвратно-поступательного движения поршней во вращательное движение выходного вала, отличающийся тем, что преобразующее устройство выполнено в виде сборки двух соосно установленных между собой на стойке трехшарнирных кривошипных двуплечих рычагов, которые пересекаются между собой и со стойкой в одной общей точке и в каждом из которых все три шарнира расположены на одной прямой линии, а упомянутые кривошипные двуплечие рычаги соединены с каждым из поршней двумя симметрично установленными относительно стойки шатунами одинаковой длины, попарно соединенными с каждым из поршней через двойной цилиндрический шарнир.
2. Многопоршневой двигатель по п. 1, отличающийся тем, что длина каждого из попарно установленных шатунов выполнена больше длины каждого из соединяемых с ними кривошипных двуплечих рычагов.
3. Многопоршневой двигатель по п. 1, отличающийся тем, что каждый из кривошипных двуплечих рычагов выполнен в виде двух круглых эксцентриков, попарно сблокированных между собой в противофазе с угловым сдвигом на 180 градусов.
4. Многопоршневой двигатель по п. 1, отличающийся тем, что преобразующее устройство выполнено с двумя поршнями, расположенными на одной направляющей, проходящей через центр вращения обоих кривошипных двуплечих рычагов, которые соединены с шатунами через однократные цилиндрические шарниры с параллельными осями вращения.
5. Многопоршневой двигатель по п. 1, отличающийся тем, что преобразующее устройство выполнено с четырьмя поршнями, которые попарно расположены на двух взаимно-перпендикулярных направляющих, пересекающихся между собой в точке, совмещенной с центром вращения обоих кривошипных двуплечих рычагов, которые соединены с шатунами через двойные цилиндрические шарниры с параллельными осями вращения.
6. Многопоршневой двигатель по п. 1, отличающийся тем, что каждый из кривошипных двуплечих рычагов соединен с отдельно вращающимся выходным валом, а оба раздельно вращающихся выходных вала установлены соосно между собой по разные стороны или по одну сторону от плоскости движения поршней и выполнены с возможностью противовращения между собой.
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2525995C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2013606C1 |
| DE 102011110037 A1, 14.02.2013 | |||
| DE 102005044663 A1, 22.03.2007 | |||
| РЕГУЛИРУЕМОЕ ДРОССЕЛЬНОЕ УСТРОЙСТВО | 2017 |
|
RU2667177C2 |
