Изобретение относится к области испытаний гусеничных машин, а именно измерению буксования гусеничного движителя.
При повороте гусеничной машины каждый трак, уложенный на грунт, совершает, в связи с буксованием, сложное перемещение в плоскости опорной поверхности: два поступательных движения - вдоль и поперек оси гусеничной машины, и вращательное. В итоге каждый трак перемещается относительно грунта гораздо больше, чем при прямолинейном движении. Современные гусеничные машины оборудованы дифференциальным механизмом поворота, либо имеют бортовой бесступенчатый привод, что позволяет им разворачиваться вокруг вертикальной оси, проходящей через центр масс машины. Определение величины буксования является важным предметом испытаний таких гусеничных машин.
Известно техническое решение для измерения буксования гусеничного транспортного средства, состоящее из шкива в виде равномерно установленных на гусеничном обводе кронштейнов, намотанной на него проволоки, неподвижной штанги, на которой закреплен конец проволоки, датчика оборотов, датчика перемещения и регистрирующей аппаратуры [Авторское свидетельство СССР №1658007 А1 «Устройство для измерения буксования гусеничного транспортного средства», приоритет от 07.07.1989, опубл. 23.05.1991 в бюл. «23. НИИ специального машиностроения при МГТУ им. Баумана. Авторы: А.Ф. Батанов, С.В. Муркин, С.Н. Грицинин].
Недостатком данного технического решения является невозможность замера буксования гусеничного движителя при повороте машины.
Наиболее близким техническим решением является устройство для измерения буксования гусеничного трактора, состоящее из трех колес, контактирующих с грунтом и закрепленных на звене гусениц, тахогенераторов, установленных на оси указанных колес, и органа регистрации сигналов [Авторское свидетельство СССР №623156 «Устройство для измерения буксования гусеничного трактора», приоритет от 05.09.1978 одесская научно-исследовательская станция научно-исследовательского тракторного института. Авторы: С.С. Одинец и Д.З. Стародинский].
Недостатком устройства является невозможность замера суммарной величины буксования по всем направлениям при повороте гусеничной машины с нулевым радиусом вокруг центра масс (ЦМ) в связи с тем, что указанные колеса предназначены только для замера одного вида перемещения - вдоль оси машины, характерного для прямолинейного движения, при этом перемещения трака относительно грунт в направлении поперек оси машины и вокруг оси вращения машины не определяются. Кроме того свободному вращению колеса будет препятствовать бруствер, создаваемым боковым перемещением траков относительно опорной поверхности, появлением неровностей под колесом и появлением из-за этого ошибки замера.
Техническая задача изобретения направлена на измерение буксования гусениц при развороте на месте, вокруг центра масс.
Техническая задача достигается тем, что устройство для измерения буксования гусениц, содержащее датчики измерения частоты вращения ведущих колес и котроллер, дополнительно снабжено гироскопическим датчиком, установленным на корпусе гусеничной машины. При этом коэффициент буксования рассчитывается контроллером по формуле  , где теоретическая скорость движения гусеничной тележки
, где теоретическая скорость движения гусеничной тележки  , определяемая частотой вращения ведущих колес nВК датчиками частоты вращения ведущих колес, а фактическая линейная скоростью середины гусеничной тележки
, определяемая частотой вращения ведущих колес nВК датчиками частоты вращения ведущих колес, а фактическая линейная скоростью середины гусеничной тележки  , где ω - фактическая угловая скорость вращения корпуса трактора, определяемая гироскопическим датчиком.
, где ω - фактическая угловая скорость вращения корпуса трактора, определяемая гироскопическим датчиком.
Технические решения, заключенные в аналоге и прототипе, предназначены для замера буксования гусеничной машины при прямолинейном движении и не позволяют измерить буксование гусеничной машины при развороте на месте. Наличие датчиков частоты вращения каждого из ведущих колес позволяет замерить частоту вращения каждого ведущего колеса и вычислять контроллером теоретическую скорость каждого борта, а наличие гироскопического датчика - замерять фактическую угловую скорость вращения корпуса и через нее вычислять контроллером фактическую скорость каждого борта. В результате предлагаемое техническое решение позволяет измерять буксование при развороте на месте.
Сущность заявляемого технического решения поясняется графическим материалом, на котором представлена схема устройства. Позициями обозначены следующие элементы: ведущие колеса 1 и 2, гусеничный трактор 3, датчики измерения частоты вращения ведущих колес 4 и 5, котроллер 6, гироскопический датчик 7.
Устройство работает следующим образом: частота вращения ведущих колес 1 и 2 (фиг.) гусеничного трактора 3, замеренная датчиками частоты вращения 4 и 5, определяет теоретическую скорость движения гусеничной тележки  каждого борта, вычисленную контроллером 6 по формуле:
каждого борта, вычисленную контроллером 6 по формуле:
где  - частота вращения ведущего колеса;
- частота вращения ведущего колеса;  - радиус ведущего колеса.
- радиус ведущего колеса.
Гироскопический датчик 7 замеряет фактическую угловую скорость вращения корпуса трактора  , которая связана с фактической линейной скоростью
, которая связана с фактической линейной скоростью  середины гусеничной тележки, вычислена контроллером 6 по формуле:
середины гусеничной тележки, вычислена контроллером 6 по формуле:
где B - колея трактора.
Коэффициент буксования определяется контроллером 6 по формуле
.
Таким образом, предлагаемое техническое решение позволяет измерять буксование гусеничной машины при развороте на месте, чего не могли обеспечить технические решения аналога и прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования буксования гусеничного транспортного средства | 1978 |
|
SU732719A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ (ВАРИАНТЫ) | 2019 |
|
RU2720694C1 |
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2002 |
|
RU2237239C2 |
| Способ контроля параметров машино-тракторного агрегата | 2020 |
|
RU2748816C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2013 |
|
RU2548725C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2008 |
|
RU2365916C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2008 |
|
RU2366944C1 |
| УСТРОЙСТВО ДЛЯ ЭКСПРЕСС-АНАЛИЗА ТЯГОВО-СЦЕПНЫХ СВОЙСТВ ДВИЖИТЕЛЕЙ ТРАКТОРОВ | 1995 |
|
RU2096747C1 |
| Устройство для исследования буксования гусеничного транспортного средства | 1980 |
|
SU896472A2 |
Изобретение относится к измерению буксования гусеничного движителя. Изобретение направлено на измерение буксования гусениц при развороте на месте, вокруг центра масс. Устройство для измерения буксования гусениц содержит датчики измерения частоты вращения ведущих колес и котроллер. Устройство дополнительно снабжено гироскопическим датчиком, установленным на корпусе гусеничной машины. Коэффициент буксования рассчитывается контроллером по формуле:  , где теоретическая скорость движения гусеничной тележки рассчитывается по формуле:
, где теоретическая скорость движения гусеничной тележки рассчитывается по формуле:  , где
, где  – частота вращения ведущего колеса;
– частота вращения ведущего колеса;  – радиус ведущего колеса, а фактическая линейная скорость середины гусеничной тележки рассчитывается по формуле:
– радиус ведущего колеса, а фактическая линейная скорость середины гусеничной тележки рассчитывается по формуле:  , где
, где  – колея трактора, ω – фактическая угловая скорость вращения корпуса трактора, определяемая гироскопическим датчиком. Достигается возможность замера буксования гусеничного движителя при повороте машины. 1 ил.
– колея трактора, ω – фактическая угловая скорость вращения корпуса трактора, определяемая гироскопическим датчиком. Достигается возможность замера буксования гусеничного движителя при повороте машины. 1 ил.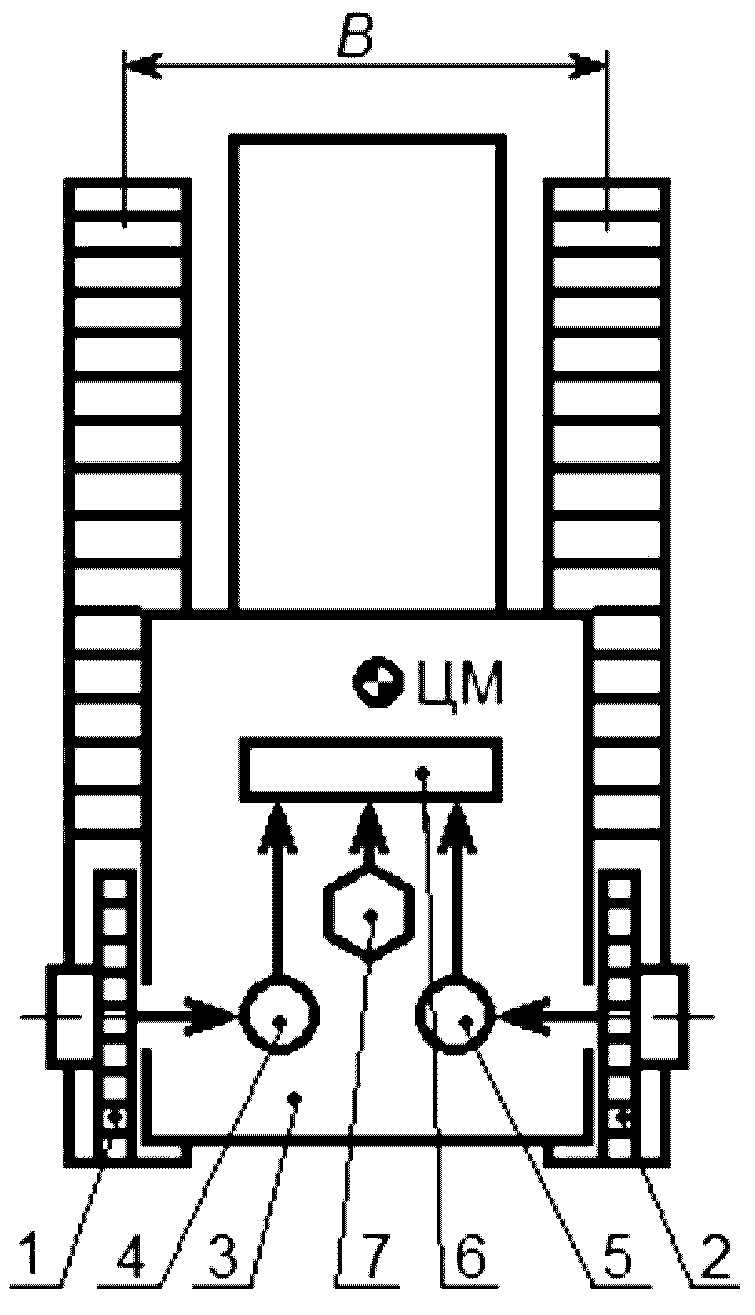
Устройство для измерения буксования гусеничной машины при повороте вокруг центра масс, содержащее датчики частоты вращения ведущих колес и контроллер, отличающееся тем, что устройство снабжено гироскопическим датчиком, установленным на корпусе гусеничной машины, при этом датчики частоты вращения ведущих колес и гироскопический датчик соединены с контроллером посредством электрических связей, а коэффициент буксования рассчитывается контроллером по формуле:
 ,
,
где теоретическая скорость движения гусеничной тележки рассчитывается по формуле:
 ,
,
где  – частота вращения ведущего колеса;
– частота вращения ведущего колеса;  – радиус ведущего колеса, а фактическая линейная скоростью середины гусеничной тележки рассчитывается по формуле:
– радиус ведущего колеса, а фактическая линейная скоростью середины гусеничной тележки рассчитывается по формуле:
 ,
,
где  – колея трактора, ω – фактическая угловая скорость вращения корпуса трактора, определяемая гироскопическим датчиком.
– колея трактора, ω – фактическая угловая скорость вращения корпуса трактора, определяемая гироскопическим датчиком.
| Устройство для измерения буксования трактора | 1972 |
|
SU507799A1 |
| Устройство для измерения буксования гусеничного трактора | 1977 |
|
SU623156A1 |
| Препарат муковит В12 | 1958 |
|
SU118587A1 |
| Функциональный цифро-аналоговый преобразователь | 1975 |
|
SU741289A1 |

