Предлагаемое изобретение относится к области диагностики и может использоваться для диагностики вагонного оборудования.
Известен «Цеховой комплекс измерения, испытаний и контроля тормозного оборудования грузовых вагонов на участке автоконтрольного пункта (комплекс АКП)» (RU 125147 U1, опубл. 27.02.2013, МПК В60Т 17/22), содержащий производственные модули в виде стендов, оборудованных графическими дисплеями, для ремонта и испытаний тормозного оборудования, устройства идентификации рабочего персонала и ремонтируемого оборудования, информационно-управляющую систему, которая включает рабочее место мастера, состоящее из персонального компьютера с программным обеспечением и принтера, объединенных связью со стендами в единую информационную систему с возможностью передачи результатов испытаний в компьютерную базу данных предприятия. Производственные модули выполнены в виде раздельных рабочих мест для ремонта тормозного оборудования и стендов для проверки и испытаний тормозного оборудования, связь между рабочим местом мастера и стендами осуществляется через преобразователи интерфейсов по шине последовательной передачи данных с интерфейсом RS-485 и многоадресной структурой подключения внешних устройств, а в качестве графического дисплея использовано устройства ввода и отображения информации на терминале (например, XBT-R410).
Наиболее близким, к предлагаемому техническому решению, является «Система контроля параметров тележек грузовых вагонов» [RU 16402 U1, опубл. 27.12.2000, МПК G01B 7/14). Система содержит датчики с измерительными преобразователями, подключенными к вычислительному устройству. Датчики выполнены линейными с индивидуальными приводами каждый, сведены в блоки по количеству контролируемых параметров в буксовых и рессорном проемах и на подпятнике надрессорной балки грузовой тележки, а вычислительное устройство снабжено компьютером с возможностью отображения на экране дисплея результатов контроля и регистрации их на принтере.
Недостатком известных решений являются ограниченные возможности по диагностике вагонного оборудования, а именно осуществление диагностики только одного типа вагонного оборудования, например тормозной системы или тележки вагона.
Технической проблемой решаемой предлагаемым изобретением является расширение функциональных возможностей диагностического стенда вагонного оборудования.
Техническим результатом предлагаемого изобретения является достижение возможности фиксировать нарушения работы различных систем и оборудования вагона, таких как тяговое, тормозное, климатическое, дверное, информационное, оборудование токоприемника, кабельной сети вагона.
Сущность предлагаемого изобретения заключается в том, что диагностический стенд вагонного оборудования содержит автоматизированное рабочее место (АРМ).
Новым в заявляемом диагностическом стенде вагонного оборудования является то, что дополнительно введены устройство преобразования, устройство распределения сигналов, блок управления, блок тормоза безопасности, блок контроля информационного комплекса, блок согласования, блок приема-передачи команд. Первый вход-выход АРМ соединен с первым входом-выходом блока контроля информационного комплекса, второй вход-выход АРМ является вторым внешним входом-выходом диагностического стенда вагонного оборудования, третий вход-выход АРМ подключен к третьему входу-выходу устройства преобразования. Первый вход-выход устройства преобразования подключен к третьему входу-выходу устройства распределения сигналов, второй вход-выход устройства преобразования подключен к первому входу-выходу блока приема-передачи команд. Первый вход-выход устройства распределения сигналов является первым внешним входом-выходом диагностического стенда вагонного оборудования, второй вход-выход устройства распределения сигналов подключен к входу-выходу блока управления, первый выход которого подключен к первому входу устройства распределения сигналов. Второй выход блока управления соединен со вторым входом устройства распределения сигналов, третий выход блока управления соединен с третьим входом устройства распределения сигналов, причем его второй выход подключен к первому входу блока управления. Третий выход устройства распределения сигналов подключен ко второму входу блока управления, четвертый вход-выход устройства распределения сигналов соединен с входом-выходом блока тормоза безопасности, первый выход которого подключен к пятому входу устройства распределения сигналов, а второй выход блока тормоза безопасности подключен к шестому входу устройства распределения сигналов. Пятый вход-выход устройства распределения сигналов подключен ко второму входу-выходу блока контроля информационного комплекса, первый выход устройства распределения сигналов является первым внешним выходом диагностического стенда вагонного оборудования, четвертый выход устройства распределения сигналов является вторым внешним выходом диагностического стенда вагонного оборудования, пятый выход устройства распределения сигналов является третьим внешним выходом диагностического стенда вагонного оборудования, шестой выход устройства распределения сигналов является четвертым внешним выходом диагностического стенда вагонного оборудования, четвертый вход устройства распределения сигналов является первым внешним входом диагностического стенда вагонного оборудования, седьмой вход устройства распределения сигналов является вторым внешним входом диагностического стенда вагонного оборудования. Вход блока согласования является третьим внешним входом диагностического стенда вагонного оборудования, второй вход-выход блока согласования является третьим внешним входом-выходом диагностического стенда вагонного оборудования, третий вход-выход блока согласования является четвертым внешним входом-выходом диагностического стенда вагонного оборудования, четвертый вход-выход блока согласования является пятым внешним входом-выходом диагностического стенда вагонного оборудования, пятый вход-выход блока согласования является шестым внешним входом-выходом диагностического стенда вагонного оборудования. Выход блока согласования подключен к входу блока приема-передачи команд, первый вход-выход блока согласования подключен ко второму входу-выходу блока приема-передачи команд.
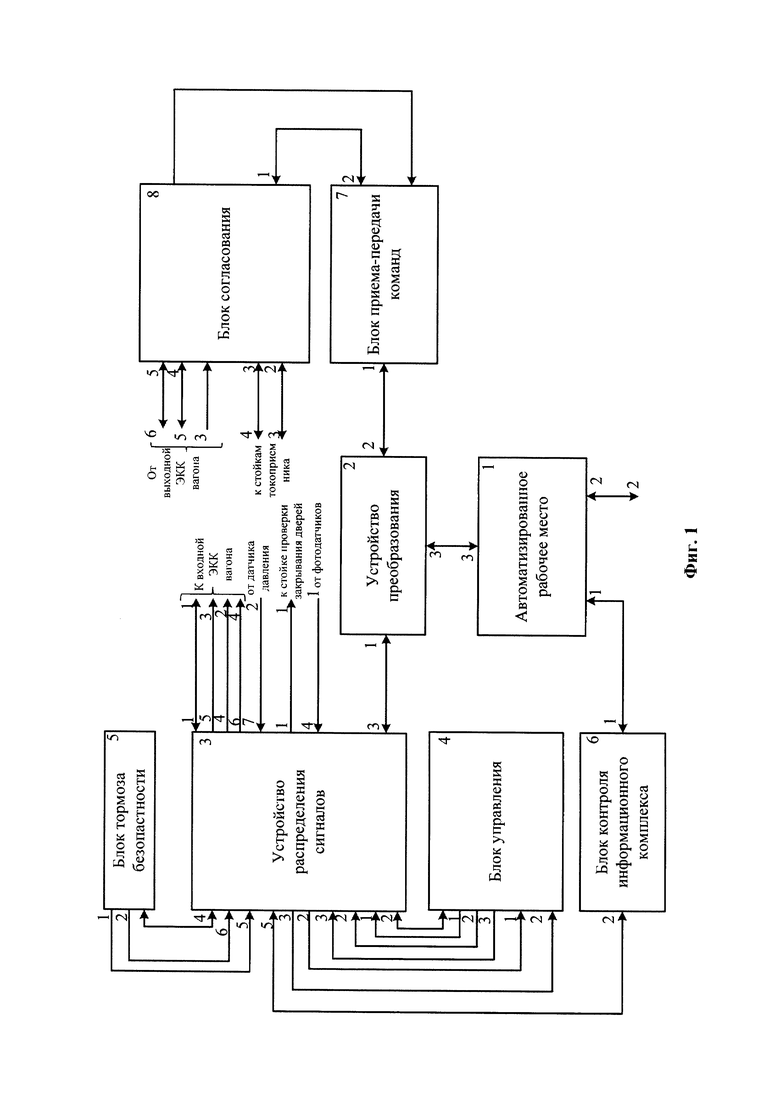
На Фиг. 1 изображена структурная схема диагностического стенда вагонного оборудования.
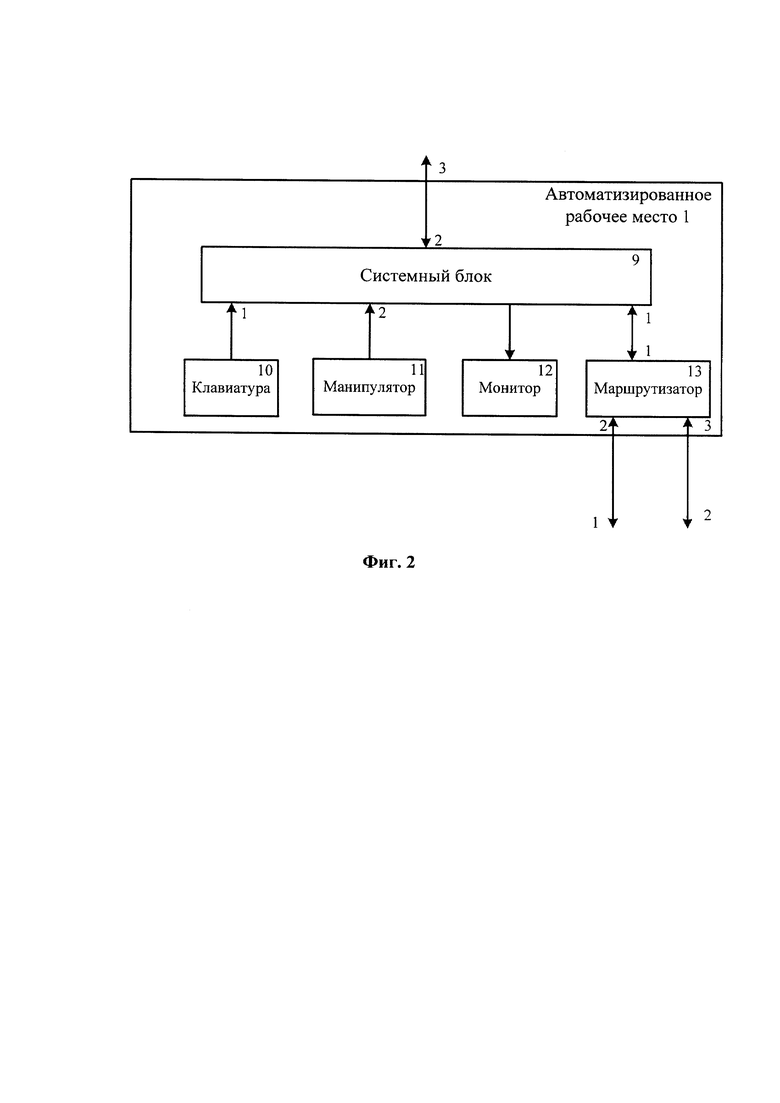
На Фиг. 2 изображена структурная схема примера выполнения автоматизированного рабочего места.
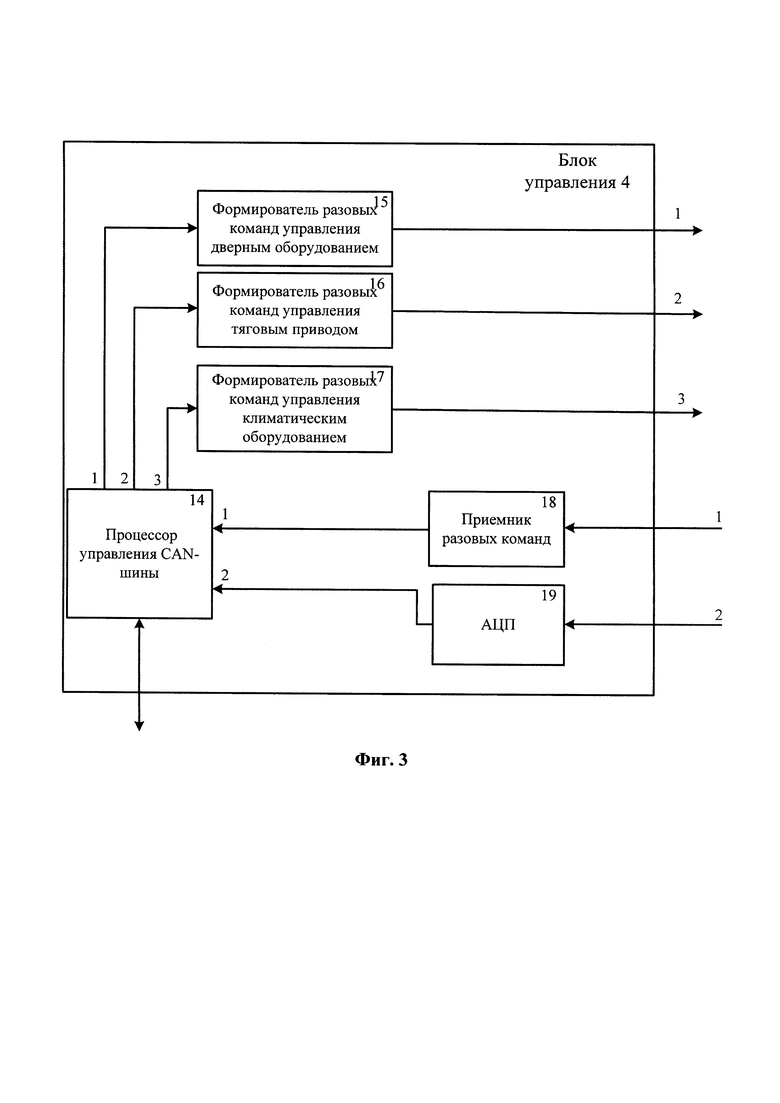
На Фиг. 3 изображена структурная схема примера выполнения блока управления.
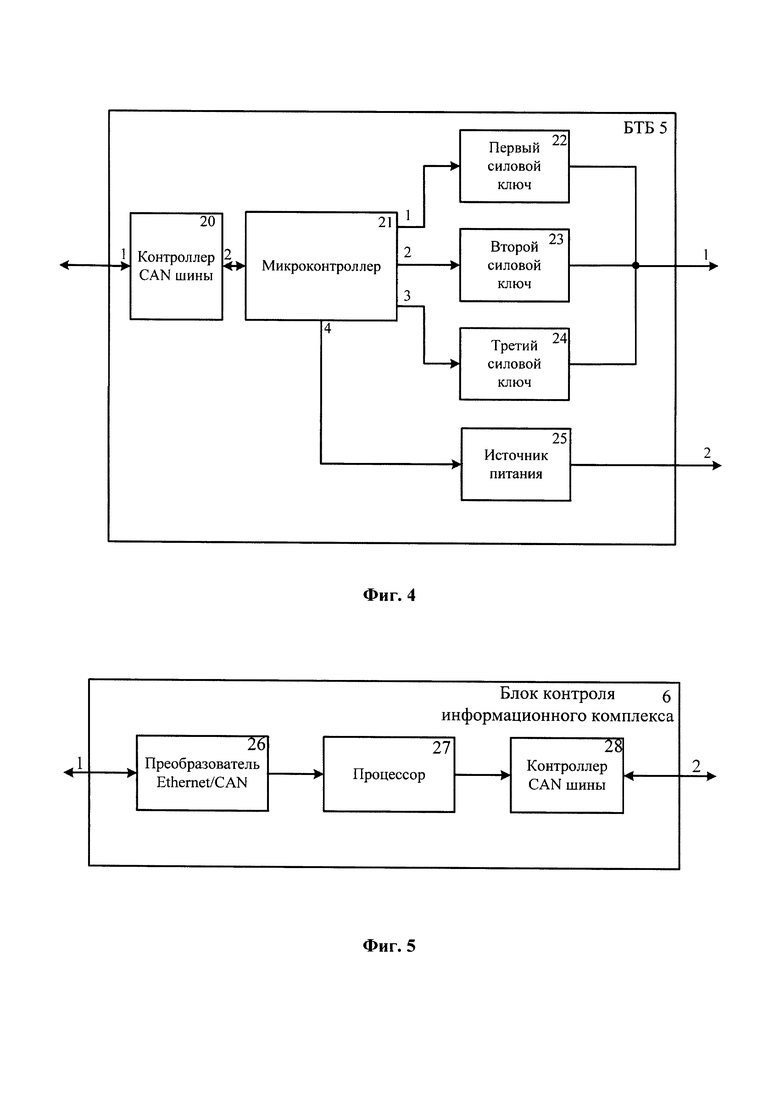
На Фиг. 4 изображена структурная схема примера выполнения блока тормоза безопасности.
На Фиг. 5 изображена структурная схема примера выполнения блока контроля информационного комплекса.
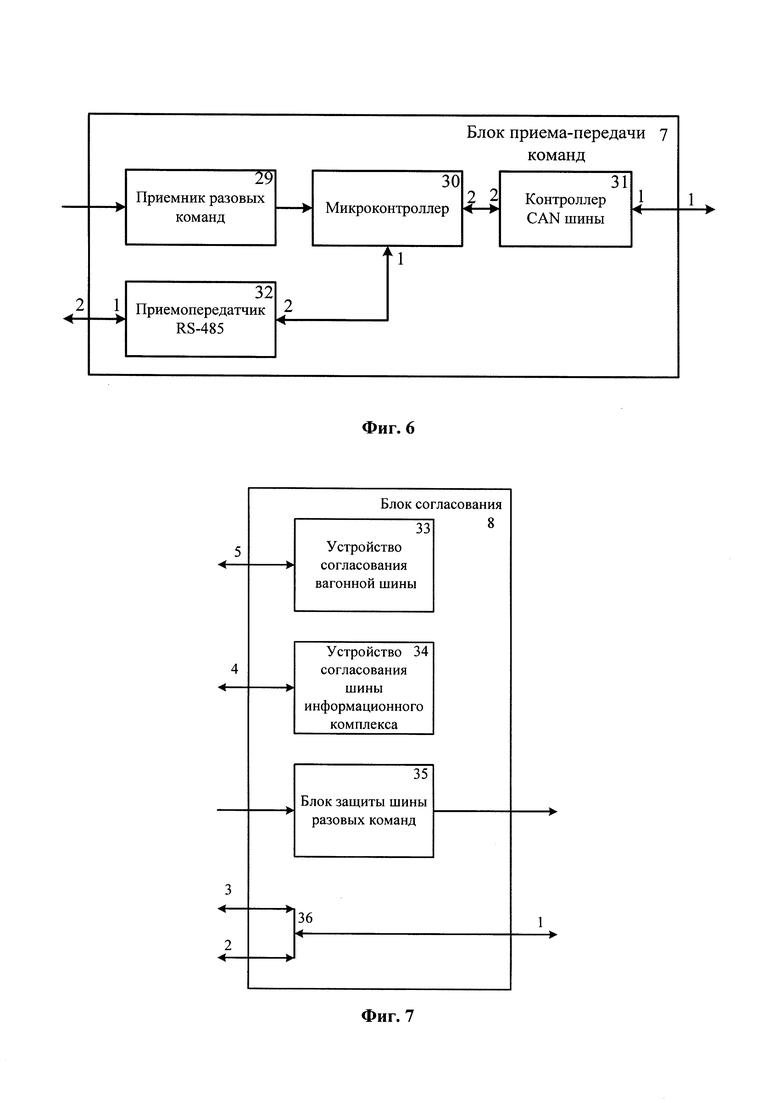
На Фиг. 6 изображена структурная схема примера выполнения блока приема-передачи команд.
На Фиг. 7 изображена структурная схема примера выполнения блока согласования.
Диагностический стенд вагонного оборудования содержит автоматизированное рабочее место (1), устройство преобразования (2), устройство распределения сигналов (3), блок управления (4), блок тормоза безопасности (5), блок контроля информационного комплекса (6), блок приема-передачи команд (7), блок согласования (8). Первый вход-выход АРМ (1) соединен с первым входом-выходом блока контроля информационного комплекса (6), второй вход-выход АРМ (1) является вторым внешним входом-выходом диагностического стенда вагонного оборудования, третий вход-выход АРМ (1) подключен к третьему входу-выходу устройства преобразования (2). Первый вход-выход устройства преобразования (2) подключен к третьему входу-выходу устройства распределения сигналов (3), второй вход-выход устройства преобразования (2) подключен к первому входу-выходу блока приема-передачи команд (7). Первый вход-выход устройства распределения сигналов (3) является первым внешним входом-выходом диагностического стенда вагонного оборудования, второй вход-выход устройства распределения сигналов (3) подключен к входу-выходу блока управления (4), первый выход которого подключен к первому входу устройства распределения сигналов (3), второй выход блока управления (4) соединен со вторым входом устройства распределения сигналов, третий выход блока управления (4) соединен с третьим входом устройства распределения сигналов (3), причем его второй выход подключен к первому входу блока управления (4), третий выход устройства распределения сигналов (3) подключен ко второму входу блока управления (4). Четвертый вход-выход устройства распределения сигналов (3) соединен с входом-выходом блока тормоза безопасности (5), первый выход которого подключен к пятому входу устройства распределения сигналов (3), а второй выход подключен к шестому входу устройства распределения сигналов (3). Пятый вход-выход устройства распределения сигналов (3) подключен ко второму входу-выходу блока контроля информационного комплекса (6). Первый выход устройства распределения сигналов (3) является первым внешним выходом диагностического стенда вагонного оборудования, четвертый выход устройства распределения сигналов (3) является вторым внешним выходом диагностического стенда вагонного оборудования, пятый выход устройства распределения сигналов (3) является третьим внешним выходом диагностического стенда вагонного оборудования, шестой выход устройства распределения сигналов (3) является четвертым внешним выходом диагностического стенда вагонного оборудования, четвертый вход устройства распределения сигналов (3) является первым внешним входом диагностического стенда вагонного оборудования, седьмой вход устройства распределения сигналов (3) является вторым внешним входом диагностического стенда вагонного оборудования. Вход блока согласования (8) является третьим внешним входом диагностического стенда вагонного оборудования. Второй вход-выход блока согласования (8) является третьим внешним входом-выходом диагностического стенда вагонного оборудования, третий вход-выход блока согласования (8) является четвертым внешним входом-выходом диагностического стенда вагонного оборудования, четвертый вход-выход блока согласования (8) является пятым внешним входом-выходом диагностического стенда вагонного оборудования, пятый вход-выход является шестым внешним входом-выходом диагностического стенда вагонного оборудования. Выход блока согласования (8) подключен к входу блока приема-передачи команд (7), первый вход-выход блока согласования (8) подключен ко второму входу-выходу блока приема-передачи команд (7).
Автоматизированное рабочее место (1), пример выполнения которого приведен на Фиг. 2, включает в себя системный блок (9), клавиатуру (10), манипулятор (11), монитор (12), маршрутизатор (13). Первый вход-выход системного блока (9) подключен к первому входу-выходу маршрутизатора (13), второй вход-выход которого является первым входом-выходом автоматизированного рабочего места (1), а третий вход-выход маршрутизатора является вторым входом-выходом автоматизированного рабочего места (1), второй вход-выход системного блока (9) является третьим входом-выходом автоматизированного рабочего места (1). Выход клавиатуры (10) подключен к первому входу системного блока (9), выход манипулятора (11) подключен ко второму входу системного блока (9). Выход системного блока (9) подключен к входу монитора (12).
Блок управления (4), пример выполнения которого приведен на Фиг. 3, включает в себя процессор управления CAN-шины (14), формирователь разовых команд управления дверным оборудованием (15), формирователь разовых команд управления тяговым приводом (16), формирователь разовых команд управления климатическим оборудованием (17), приемник разовых команд (18), аналого-цифровой преобразователь (АЦП) (19). Вход-выход процессора управления CAN-шины (14) является внешним входом-выходом блока управления (4), первый выход процессора управления CAN-шины (14) подключен к входу формирователя разовых команд управления дверным оборудованием (15), выход которого является первым внешним выходом блока управления (4). Второй выход процессора управления CAN-шины (14) соединен с входом формирователя разовых команд управления тяговым приводом (16), выход которого является вторым внешним выходом блока управления (4). Третий выход процессора управления CAN-шины (14) подключен к входу формирователя разовых команд управления климатическим оборудованием (17), выход которого является третьим внешним выходом блока управления (4). Вход приемника разовых команд (18) является первым внешним входом блока управления (4), вход АЦП (19) является вторым внешним входом блока управления (4). Выход приемника разовых команд (18) соединен с первым входом процессора управления CAN-шины (14), выход АЦП (19) соединен со вторым входом процессора управления CAN-шины (14).
Блок тормоза безопасности (5), пример выполнения которого приведен на Фиг. 4, содержит контроллер CAN шины (20), микроконтроллер (21), первый силовой ключ (22), второй силовой ключ (23), третий силовой ключ (24), источник питания (25). Первый вход-выход контроллера CAN шины (20) является внешним входом-выходом блока тормоза безопасности (5), а второй вход-выход контроллера CAN шины (20) подключен к входу-выходу микроконтроллера (21). Первый выход микроконтроллера (21) соединен с входом первого силового ключа (22), второй выход микроконтроллера (21) соединен с входом второго силового ключа (23), третий выход микроконтроллера (21) соединен с входом третьего силового ключа (24). Выходы силовых ключей (22), (23), (24) объединены в шину и являются первым внешним выходом блока тормоза безопасности (5). Четвертый выход микроконтроллера (21) подключен к входу источника питания (25). Выход источника питания (25) является вторым внешним выходом блока тормоза безопасности (5).
Блок контроля информационного комплекса (6), пример выполнения которого приведен на Фиг. 5, содержит преобразователь Ethernet/CAN (26), процессор (27), контроллер CAN шины (28). Вход-выход преобразователя Ethernet/CAN (26) является первым внешним входом-выходом блока контроля информационного комплекса (6). Выход преобразователя Ethernet/CAN (26) подключен к входу процессора (27), выход которого подключен к входу котроллера CAN шины (28). Вход-выход контроллера CAN шины (28) является вторым внешним входом-выходом блока контроля информационного комплекса (6).
Блок приема-передачи команд (7), пример выполнения которого приведен на Фиг. 6, содержит приемник разовых команд (29), микроконтроллер (30), контроллер CAN шины (31), приемопередатчик RS-485 (32). Вход приемника разовых команд (29) является внешним входом блока приема-передачи команд (7). Выход приемника разовых команд (29) подключен к входу микроконтроллера (30), второй вход-выход которого подключен ко второму входу-выходу контроллера CAN-шины (31), первый вход-выход которого является первым внешним входом-выходом блока приема-передачи команд (7). Первый вход-выход приемопередатчика RS-485 (32) является вторым внешним вход-выходом блока приема-передачи команд (7). Второй вход-выход приемопередатчика RS-485 (32) подключен к первому входу-выходу микроконтроллера (30).
Блок согласования (8), пример выполнения которого приведен на Фиг. 7, содержит устройство согласования вагонной шины (33), устройство согласования шины информационного комплекса (34), блок защиты шины разовых команд (35), разделитель шины (36).
Оператор диагностического стенда с автоматизированного рабочего места (АРМ) (1) задает различные режимы проверки вагонного оборудования, например вагона электропоезда метро. Для этого оператор вводит соответствующие команды с помощью АРМ (1), выполненного, например, в виде персонального компьютера, содержащего системный блок (9), клавиатуру (10), манипулятор (11), монитор (12), и маршрутизатора (13). Так же АРМ (1) может быть выполнен в виде ноутбука и маршрутизатора.
В режиме проверки дверного оборудования вагона осуществляют проверку функции открытия/закрытия дверей, проверку функции резервного закрытия/открытия дверей, проверку работы системы противозажатия и др.
Оператор посредством клавиатуры (10) и манипулятора (11) АРМ (1) запускает режим проверки работы дверного оборудования вагона. АРМ (1) (системный блок (9)) формирует сигналы управления, и со своего третьего входа-выхода по компьютерной шине, для примера это может быть шина USB, выдает их на третий вход-выход устройства преобразования (2). Устройство преобразования (2) преобразует эти сигналы из формата компьютерной шины в формат промышленной сети (шины), например это формат CAN-шины, и выдает преобразованные сигналы со своего первого входа-выхода на третий вход-выход устройства распределения сигналов (3).
Устройство распределения сигналов (3) передает принятые сигналы со своего второго входа-выхода на вход-выход блока управления (4). Входом-выходом блока управления (4) является вход-выход процессора управления CAN-шины (14), который передает принятые сигналы со своего первого выхода на вход формирователя разовых команд управления дверным оборудованием (15). Формирователь разовых команд управления дверным оборудованием (15) в соответствии с поступившими сигналами формирует последовательность разовых команд управления дверным оборудованием и стойками проверки закрытия дверей вагона, например, открытие/закрытие левых дверей, открытие/закрытие правых дверей, перемещение балки стоек проверки закрывания дверей, открытие дверей при зажатии балки и т.д.
Со своего выхода, являющегося первым выходом блока управления (4), формирователь разовых команд управления дверным оборудованием (15) выдает разовые команды на первый вход устройства распределения сигналов (3). Устройство распределения сигналов (3) направляет разовые команды, предназначенные для дверного оборудования на свой четвертый выход, который подключается к электроконтактной коробке вагона (ЭКК), а на первый выход разовые команды, предназначенные для стоек проверки закрывания дверей, являющихся для диагностического стенда внешним подключаемым оборудованием.
Дверное оборудование выполняет требуемые команды, а фиксация их результатов выполнения осуществляется с помощью внешних датчиков подключаемых к четвертому входу устройства распределения сигналов (3) (первому внешнему входу диагностического стенда). Такими датчиками могут быть, например фотодатчики. Сигналы от фотодатчиков поступают на четвертый вход устройства распределения сигналов (3), который перенаправляет их со своего второго выхода на первый вход блока управления (4), являющийся входом приемника разовых команд (18). Далее сигналы поступают на первый вход процессора управления CAN-шины (14), который преобразует сигналы в формат CAN, а с его входа-выхода, являющегося входом-выходом блока управления (4), сигналы передаются в формате сигналов CAN шины на второй вход-выход устройства распределения сигналов (3). Устройство распределения сигналов (3) перенаправляет сигналы в формате CAN шины на свой третий вход-выход, которые поступают на первый вход-выход устройства преобразования (2). Устройство преобразования (2) преобразует данные формата CAN в формат компьютерной шины USB и передает их со своего третьего входа-выхода на третий вход-выход АРМ (1).
Если произошло нарушение работы дверного оборудования, например, по команде оператора «закрытие дверей», одна из дверей осталась открытой, это нарушение фиксируется внешним фотодатчиком и АРМ (1) осуществляет отображение информации оператору об этом на мониторе (12), либо если при проверке функции противозажатия дверного оборудования, дверь осталась закрытой с зажатой балкой стойки проверки закрывания дверей, АРМ (1) отображает информацию о нарушении работы дверного оборудования. При штатном выполнении дверным оборудованием всех заданных команд АРМ (1) отображает оператору информацию об успешном прохождении диагностики дверного оборудования.
Сигналы разовых команд проходят по кабельной сети через все блоки управления дверьми вагона и с выходной электроконтактной коробки вагона поступают на вход блока согласования (8) (третий внешний вход диагностического стенда). Блок согласования (8) защищает шину разовых команд от превышения допустимого тока и транслирует разовые команды на свой выход. С выхода блока согласования (8) разовые команды поступают на вход блока приема-передачи команд (7). В блоке приема-передачи команд (7) осуществляется их прием приемником разовых команд (29) и преобразование в цифровой код. Далее микроконтроллер (30) осуществляет анализ принятых разовых команд (наличие либо отсутствие), их преобразование и передачу в контроллер CAN шины (31). Таким образом, блок приема-передачи команд (7) преобразует разовые команды в данные формата CAN шины. Со своего первого входа-выхода блок приема-передачи команд (7) передает данные на второй вход-выход устройства преобразования (2) и преобразованные данные в формате USB поступают на третий вход-выход АРМ (1). На мониторе (12) АРМ (1) отображаются данные о том, что разовые команды прошли по всей кабельной сети вагона без ошибок и таким образом, подтверждается ее целостность, в противном случае в АРМ (1) поступает информация об отсутствии разовой команды на выходе ЭКК вагона и таким образом фиксируется нарушение кабельной сети дверного оборудования.
В режиме проверки тягового привода вагона осуществляют проверку правильности подключения тягового двигателя, анализ направления вращения колесных пар в соответствии с ориентацией вагона, проверку формирования основных управляющих команд тягового привода, проверку резервного управления тяговым приводом и др.
При запуске режима проверки работы тягового оборудования вагона, АРМ (1) формирует сигналы управления и со своего третьего входа-выхода по компьютерной шине USB выдает их на третий вход-выход устройства преобразования (2). Устройство преобразования (2) преобразует эти сигналы из формата компьютерной шины USB в формат промышленной сети (шины) CAN, и выдает преобразованные сигналы со своего первого входа-выхода на третий вход-выход устройства распределения сигналов (3).
Устройство распределения сигналов (3) передает принятые сигналы со своего второго входа-выхода на вход-выход блока управления (4). Блок управления (4) (входящий в его состав формирователь разовых команд управления тяговым приводом (16)), в соответствии с поступившими сигналами формирует последовательность разовых команд управления тяговым приводом: направление движения вперед, направление движения назад, резервное управление и т.д.
Блок управления (4) со своего второго выхода выдает сформированные разовые команды на второй вход устройства распределения сигналов (3).
Устройство распределения сигналов (3) перенаправляет разовые команды, предназначенные для тягового привода на свой четвертый выход, который подключен к электроконтактной коробке вагона. Тяговое оборудование выполняет заданные команды, контроль выполнения которых осуществляется по сигналам, поступающим от тягового оборудования через электроконтактную коробку вагона на первый вход-выход устройства распределения сигналов (3) (в формате данных вагонной шины, например CAN шины). С первого входа-выхода устройства распределения сигналов (3) сигналы перенаправляются на третий вход-выход устройства распределения сигналов (3), с которого они поступают через устройство преобразования (2), на третий вход-выход АРМ (1). АРМ (1) осуществляет отображение на своем мониторе (12) заданных оператором команд и результатов их выполнения, поступивших от тягового оборудования. Так же на второй внешний вход-выход диагностического стенда поступают данные от внешних датчиков, например датчиков катковой установки, на которой размещают вагон, такие как скорость и направление вращения колесных пар и т.д. Эта информация поступает на третий вход-выход маршрутизатора (13) АРМ (1), и затем отображается АРМ (1) на мониторе (12). Второй внешний вход-выход диагностического стенда может быть подключен к катковой установке, на которой размещают вагон, например по шине Ethernet.
При нарушении работы тягового оборудования, например, неправильном направлении вращения колесных пар или разной скорости вращения колесных пар вагона АРМ (1) отображает информацию о нештатной работе оператору и таким образом фиксируется нарушение в работе оборудования.
Также в этом режиме осуществляется проверка целостности кабельной сети, аналогично предыдущему режиму. Разовые команды поступают на блок приема-передачи команд (7) через блок согласования (8) и в преобразованном виде поступают на АРМ (1), где отображается информация об успешном/неуспешном прохождении команд по кабельной сети вагона, связывающей тяговое оборудование.
Аналогично запускается проверка климатического оборудования вагона. Оператор задает соответствующий режим проверки на АРМ (1). АРМ (1) формирует сигналы управления и со своего третьего входа-выхода по компьютерной шине USB выдает их на третий вход-выход устройства преобразования (2). Устройство преобразования (2) преобразует эти сигналы из формата компьютерной шины USB в формат промышленной сети (шины) CAN, и выдает преобразованные сигналы со своего первого входа-выхода на третий вход-выход устройства распределения сигналов (3).
Устройство распределения сигналов (3) передает принятые сигналы со своего второго входа-выхода на вход-выход блока управления (4). Блок управления (4) (входящий в его состав формирователь разовых команд управления климатическим оборудованием (17)) в соответствии с поступившими сигналами формирует последовательность разовых команд управления климатическим оборудованием: включение вентиляции, включение отопления и т.д.
Блок управления (4) со своего третьего выхода выдает сформированные разовые команды на третий вход устройства распределения сигналов (3).
Устройство распределения сигналов (3) перенаправляет разовые команды на свой четвертый выход, который подключен к электроконтактной коробке вагона. Климатическое оборудование вагона выполняет заданные команды, и формирует контрольные сигналы в формате CAN шины, поступающие на первый вход-выход устройства распределения сигналов (3) и далее с его третьего входа-выхода на первый вход-выход устройства преобразования (1). Устройство преобразования (2) преобразует данные формата CAN в формат компьютерной шины USB и передает их со своего третьего входа-выхода на третий вход-выход АРМ (1). АРМ (1) осуществляет отображение на своем мониторе (12) заданных оператором команд и результатов их выполнения, поступивших в виде контрольных сигналов от климатического оборудования с информацией о температуре формируемого воздушного потока, температуре в вагоне и т.д. При несоответствии заданных и принятых температурных параметров, фиксируется нарушение в работе климатического оборудования.
В этом режиме так же осуществляется проверка целостности кабельной сети, аналогично предыдущим режимам. Разовые команды поступают на блок приема-передачи команд (7) через блок согласования (8) и в преобразованном виде поступают на АРМ (1), где отображается информация об успешном/неуспешном прохождении команд по кабельной сети вагона, связывающей климатическое оборудование.
В режиме проверки тормозной системы АРМ (1) выдает сигналы управления со своего третьего входа-выхода по компьютерной шине на третий вход-выход устройства преобразования (2). Устройство преобразования (2) преобразует эти сигналы из формата компьютерной шины USB в формат промышленной сети (шины) CAN, и выдает преобразованные сигналы со своего первого входа-выхода на третий вход-выход устройства распределения сигналов (3).
Устройство распределения сигналов (3) передает принятые сигналы со своего четвертого входа-выхода на вход-выход блока тормоза безопасности (5). Контроллер CAN шины (20) осуществляет прием сигналов по шине и передачу их в микроконтроллер (21) блока тормоза безопасности (5). Микроконтроллер (21) в соответствии с принятыми сигналами осуществляет включение различных уставок торможения и отключения петли безопасности вагона. Для этого микроконтроллер (21), переключением силовых ключей (22), (23), (24) формирует комбинации разовых команд, управляя, таким образом, клапанами тормозов. Со своего первого выхода БТБ (5) выдает разовые команды на пятый вход устройства распределения сигналов (3). Устройство распределения сигналов (3) направляет разовые команды на свой четвертый выход, который подключен к электроконтактной коробке вагона. Тормоза вагона в соответствии с заданной командой прикладывают давление и отрабатывают торможение. Контроль работы тормозов осуществляется внешними датчиками давления тормозной системы вагона, сигналы от которых в аналоговом формате напряжение-код поступают на седьмой вход устройства распределения сигналов (3) (на второй внешний вход диагностического стенда). Устройство распределения сигналов (3) перенаправляет их на свой третий выход, соединенный со вторым входом блока управления (4). АЦП (19) блока управления (4) преобразует данные от датчиков давления из формата напряжение-код в цифровой формат и выдает их на второй вход процессора управления CAN-шины (14), который преобразует их в формат CAN. Таким образом, блок управления (4) со своего входа-выхода передает данные через устройство распределения сигналов (3) на первый вход-выход устройства преобразования (2), а с его третьего входа-выхода данные поступают на третий вход-выход АРМ (1). АРМ (1) осуществляет отображение оператору значения давления и другой информации о работоспособности тормозной системы на мониторе (12). При проверке режима аварийного торможения (отключение петли безопасности вагона) микроконтроллер (21) выдает команду со своего четвертого выхода источнику питания (25) на отключение напряжения. Второй выход БТБ (5) подключен к шестому входу устройства распределения сигналов (3), которое передает напряжение на свой шестой выход, подключенный к ЭКК вагона. При снятии напряжения на втором выходе БТБ (5) соответственно снимается напряжение на петле безопасности вагона и срабатывает аварийная тормозная система. Информация об отработке команды поступает на АРМ (1) и отображается оператору аналогично информации от штатной тормозной системы, проверка которой описана выше. При несоответствии давления требуемого для штатной работы тормозной системы фиксируется нарушение в ее работе.
В указанных режимах диагностики блок согласования (8) обеспечивает согласование вагонной шины (CAN шины) для обеспечения ее работоспособности при обмене данными между вагонным оборудованием и диагностическим стендом. Для этого вагонная шина подключена к пятому входу-выходу блока согласования (8) (шестому внешнему входу диагностического стенда), а устройство согласования вагонной шины (33), которого согласовывает/выравнивает сопротивление в шине.
В режиме проверки вагонного цифрового информационного комплекса (ЦИК) оператор задает режим проверки ЦИК на АРМ (1). С первого входа-выхода АРМ (1) сигналы управления о запуске режима по шине данных, например Ethernet шине, поступают на первый вход-выход блока контроля информационного комплекса (6). Блок контроля информационного комплекса (6) в соответствии с сигналами управления посредством процессора (27) и контроллера CAN шины (28) формирует команды на включение/выключение системы экстренной связи, информационного табло и других блоков ЦИК в формате CAN шины. Со своего второго входа-выхода блок контроля информационного комплекса (6) выдает эти команды на пятый вход-выход устройства распределения сигналов (3). Устройство распределения сигналов (3) перенаправляет команды на свой пятый выход, который подключен к электроконтактной коробке вагона. По командам в вагоне включается табло, через систему оповещения передается речевое сообщение и т.д. Оператор визуально и на слух контролирует правильность выполнения команд.
В указанном режиме диагностики блок согласования (8) обеспечивает согласование шины информационного комплекса (например, выполненной в виде шины формата CAN) для обеспечения ее работоспособности при обмене данными между информационным комплексом и диагностическим стендом. Для этого указанная шина подключена к четвертому входу-выходу блока согласования (8) (пятому внешнему входу диагностического стенда), а устройство согласования шины информационного комплекса (34) которого согласовывает/выравнивает сопротивление в шине.
Проверка силы прижатия токоприемников осуществляется следующим образом. АРМ (1) выдает команды на запуск измерения прижатия токоприемников вагона к контактному рельсу, со своего третьего входа-выхода на третий вход-выход устройства преобразования (2) в формате USB. Со своего второго входа-выхода устройство преобразования (2) выдает преобразованные команды в формате CAN на первый вход-выход блока приема-передачи команд (7). Блок приема-передачи команд (7) преобразует посредством микроконтроллера (30) команды из формата CAN в формат (например RS-485) управления стойками, осуществляющих имитацию контактного рельса и измерение силы прижатия токоприемников и являющихся внешним оборудованием для диагностического стенда. Со своего второго входа-выхода блок приема-передачи команд (7) посредством приемопередатчика RS-485 (32) выдает команды на первый вход-выход блока согласования (8). Блок согласования (8) осуществляет разделение команд для проверки токоприемников с левой и правой сторон вагона и выдает их на свои второй и третий входы-выходы соответственно (третий и четвертый внешние входы-выходы диагностического стенда). Датчики стоек, например тензодатчики, осуществляют измерение силы прижатия токоприемников и выдают данные о факте прижатия и силы прижатия на третий и второй входы-выходы блока согласования (8). Блок согласования (8) объединяет данные и со своего первого входа-выхода выдает данные на второй вход-выход блока приема-передачи команд (7), который преобразует данные в формат CAN шины и выдает со своего первого входа-выхода на второй вход-выход устройства преобразования (2). С его третьего входа-выхода данные в формате USB поступают в АРМ (1), где отображаются на его мониторе (12), например данные о наличии/отсутствии прижатия и о силе прижатия в килограммах. При отсутствии прижатия токоприемника или слабом прижатии фиксируется нарушение в работе токоприемника.
Таким образом, осуществляется диагностика различного вагонного оборудования, позволяющая зафиксировать нарушения в его работе, и по результатам диагностики принять решение о допуске вагона к работе или о направлении его на ремонт.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| ЦЕНТРАЛИЗОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА С РАСПРЕДЕЛЕННЫМИ КОНТРОЛИРУЕМЫМИ ПУНКТАМИ | 2003 |
|
RU2240245C1 |
| Стенд комплексирования информационно-управляющих систем многофункциональных летательных аппаратов | 2016 |
|
RU2632546C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ СТЕНДОМ ДЛЯ ИСПЫТАНИЙ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ | 2010 |
|
RU2434259C1 |
| ЭКСПЕРИМЕНТАЛЬНО-ОТЛАДОЧНЫЙ КОМПЛЕКС ДЛЯ СУДОВЫХ ИНТЕГРИРОВАННЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2018 |
|
RU2696964C1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА АППАРАТУРЫ ПЕРЕДАЧИ ДАННЫХ | 2017 |
|
RU2647637C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ВОССТАНОВЛЕНИЯ ТЕХНИЧЕСКИХ СРЕДСТВ МЕДИЦИНСКОГО НАЗНАЧЕНИЯ | 1992 |
|
RU2072788C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ЭЛЕКТРОПОЕЗДА | 2018 |
|
RU2733594C2 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2521066C1 |
Изобретение относится к области диагностики и может использоваться для диагностики вагонного оборудования. Технический результат заключается в достижении возможности фиксировать нарушения работы различных систем и оборудования вагона, таких как тяговое, тормозное, климатическое, дверное, информационное, оборудование токоприемника, кабельной сети вагона. Результат достигается тем, что предложен диагностический стенд вагонного оборудования, содержащий автоматизированное рабочее место (1), устройство преобразования (2), устройство распределения сигналов (3), блок управления (4), блок тормоза безопасности (5), блок контроля информационного комплекса (6), блок приема-передачи команд (7), блок согласования (8). 7 ил.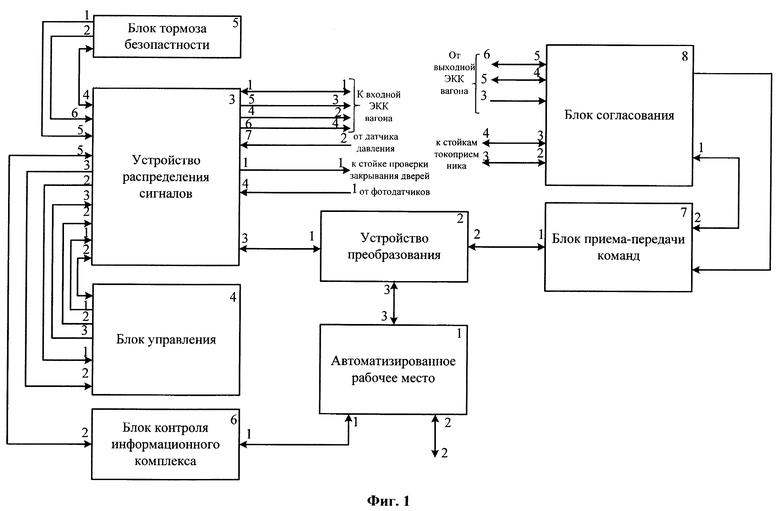
Диагностический стенд вагонного оборудования, содержащий автоматизированное рабочее место (АРМ), отличающийся тем, что дополнительно введены устройство преобразования, устройство распределения сигналов, блок управления, блок тормоза безопасности, блок контроля информационного комплекса, блок согласования, блок приема-передачи команд, причем первый вход-выход АРМ соединен с первым входом-выходом блока контроля информационного комплекса, второй вход-выход АРМ является вторым внешним входом-выходом диагностического стенда вагонного оборудования, третий вход-выход АРМ подключен к третьему входу-выходу устройства преобразования, первый вход-выход устройства преобразования подключен к третьему входу-выходу устройства распределения сигналов, второй вход-выход устройства преобразования подключен к первому входу-выходу блока приема-передачи команд, первый вход-выход устройства распределения сигналов является первым внешним входом-выходом диагностического стенда вагонного оборудования, второй вход-выход устройства распределения сигналов подключен к входу-выходу блока управления, первый выход которого подключен к первому входу устройства распределения сигналов, второй выход блока управления соединен со вторым входом устройства распределения сигналов, третий выход блока управления соединен с третьим входом устройства распределения сигналов, причем его второй выход подключен к первому входу блока управления, третий выход устройства распределения сигналов подключен ко второму входу блока управления, четвертый вход-выход устройства распределения сигналов соединен с входом-выходом блока тормоза безопасности, первый выход которого подключен к пятому входу устройства распределения сигналов, а второй выход блока тормоза безопасности подключен к шестому входу устройства распределения сигналов, пятый вход-выход устройства распределения сигналов подключен ко второму входу-выходу блока контроля информационного комплекса, первый выход устройства распределения сигналов является первым внешним выходом диагностического стенда вагонного оборудования, четвертый выход устройства распределения сигналов является вторым внешним выходом диагностического стенда вагонного оборудования, пятый выход устройства распределения сигналов является третьим внешним выходом диагностического стенда вагонного оборудования, шестой выход устройства распределения сигналов является четвертым внешним выходом диагностического стенда вагонного оборудования, четвертый вход устройства распределения сигналов является первым внешним входом диагностического стенда вагонного оборудования, седьмой вход устройства распределения сигналов является вторым внешним входом диагностического стенда вагонного оборудования, вход блока согласования является третьим внешним входом диагностического стенда вагонного оборудования, второй вход-выход блока согласования является третьим внешним входом-выходом диагностического стенда вагонного оборудования, третий вход-выход блока согласования является четвертым входом-выходом диагностического стенда вагонного оборудования, четвертый вход-выход блока согласования является пятым внешним входом-выходом диагностического стенда вагонного оборудования, пятый вход-выход блока согласования является шестым внешним входом-выходом диагностического стенда вагонного оборудования, выход блока согласования подключен к входу блока приема-передачи команд, первый вход-выход блока согласования подключен ко второму входу-выходу блока приема-передачи команд.
| Приспособление в управляемых рабочим моторных стругах для измерения толщины снимаемого слоя | 1929 |
|
SU16402A1 |
| Устройство для автоматического управления трансмиссией трактора | 1959 |
|
SU125147A1 |
| Усилительный каскад на полупроводниковом триоде | 1960 |
|
SU136780A1 |
| Инвентарный захват для крепления пучка проволок | 1959 |
|
SU127016A1 |
| CN 107600110 B, 24.09.2019 | |||
| CN 102393738 A, 28.03.2012. | |||

