Изобретение относится к области автомобилестроения, а именно к разделу использования информационной техники в конструкциях транспортных средств и может быть использовано для автоматизации процессов управления транспортными средствами, в том числе беспилотными, в зависимости от изменений дальности обзора полосы движения дороги и тормозных свойств транспортного средства.
Известен способ автоматического определения дальности обзора, в том числе полосы движения перед транспортным средством, реализованный системой измерения расстояния, снабженной стереовидеокамерой и подсоединяемого к ее выходу модулем распознавания видеоизображений и расчета дальности до границы обзора полосы движения [1].
Недостатком известного способа является невозможность автоматической оценки выбора скорости движения транспортного средства непосредственно по рассчитанной дальности обзора полосы движения перед транспортным средством.
Известен способ автоматического ограничения скорости движения транспортного средства в зависимости от координат его местонахождения при движении по дороге, реализованный интеллектуальной системой помощи при превышении скорости (ISA), предназначенной для автоматического оповещения водителя сообразно ограничениям дорожных знаков и времени суток на транспортных средствах, эксплуатируемых в Европе. Способ заключается в автоматическом восприятии бортовыми информационными средствами законодательных и местных дорожных ограничений скорости движения по всем участкам дорог и выдачи предупреждений водителю из определенного спектра предусмотренных программным обеспечением системы [2].
Недостатками известного способа являются погрешности в рекомендациях по ограничениям из заранее установленных фиксированных уровней, вне зависимости от изменений дорожных, погодных условий, загруженности дороги и реального технического состояния транспортного средства. Ограничения в выборе скорости движения транспортного средства зависят от изменений дальности обзора полосы движения дороги и тормозных свойств транспортного средства. Повседневные изменения дальности обзора полосы движения и неизбежные изменения тормозных свойств транспортного средства вынуждают в дополнение к дорожным ограничениям вводить изменяющиеся ограничения скорости движения для каждого транспортного средства индивидуально. Кроме того, известный способ чрезмерно затратен, так как для своей эффективности требует предварительной регистрации оптимальных скоростей проезда всех участков дорожной сети в разные сезоны года и при разных погодных условиях, для транспортных средств разных конструктивных схем. Для эксплуатации беспилотных транспортных средств этот способ не обеспечит автоматического выбора наибольшего из безопасных уровней скорости движения.
Наиболее близким техническим решением является принятый в качестве прототипа способ автоматического ограничения скорости движения транспортного средства в зависимости от тормозных свойств транспортного средства, заключающийся в том, что при эксплуатации контролируют наибольшее достигнутое замедление транспортного средства при каждом торможении со срабатыванием антиблокировочной тормозной системы, запоминают в обновляемом режиме величину достигнутого замедления и используют в качестве показателя тормозных свойств транспортного средства для расчета периодически пересматриваемого ограничения скорости движения транспортного средства, дополнительного по отношению к дорожным ограничениям [3].
Недостатком известного способа является неадекватность оценок ограничения скорости движения транспортного средства только в зависимости от тормозных свойств транспортного средства без учета значительно чаще происходящих изменений дальности обзора полосы движения перед поворотами дороги и вследствие появления препятствий для обзора. Ограничения скорости движения при невысокой плотности транспортного потока преимущественно зависят от изменений дальности обзора полосы движения дороги, которые необходимо учитывать дополнительно к фиксированным дорожным ограничениям, в отличие от условий движения в плотном транспортном потоке, где выбор скорости движения предопределяется скоростью движения лидера.
Техническая задача, на решение которой направлено изобретение, заключается в обеспечении автоматического формирования изменяющихся в процессе движения транспортного средства оценок ограничения скорости движения до наибольшего из безопасных уровней с учетом изменений дальности обзора дороги и тормозных свойств транспортного средства.
Решение поставленной технической задачи достигается тем, что в способе автоматического ограничения скорости движения транспортного средства, заключающемся в том, что запоминают в обновляемом режиме наибольшее значение достигнутого замедления транспортного средства при каждом торможении со срабатыванием антиблокировочной тормозной системы и используют это значение для расчета периодически пересматриваемого ограничения скорости движения транспортного средства, дополнительного по отношению к дорожным ограничениям, сравнивают рассчитанное значение ограничения с фактической скоростью движения транспортного средства и при превышении последней формируют команду водителю или системе автоматического управления движением транспортного средства на снижение скорости, согласно изобретению в автоматическом режиме обеспечивают обзор полосы движения дороги перед транспортным средством, распознают свободный режим движения по полосе по признаку отсутствия лидера перед транспортным средством, а также распознают наиболее удаленные точки обзора левой и правой границ полосы движения, далее рассчитывают дальность обзора до указанных граничных точек полосы движения, идентифицируют наличие ограничения обзора движения в плане дороги по наличию разности дальностей обзора до указанных граничных точек и рассчитывают ограничение скорости движения транспортного средства по дальности до менее удаленной из указанных граничных точек, принимаемой за полный остановочный путь транспортного средства при торможении с замедлением, зафиксированным при последнем торможении со срабатыванием антиблокировочной тормозной системы.
Решение поставленной технической задачи достигается благодаря тому, что в автоматическом режиме наряду с дорожными ограничениями используют при движении транспортного средства ограничения скорости в зависимости от дальности обзора полосы движения. Для этого оценивают полный остановочный путь до менее удаленной из граничных точек, используя при этом зафиксированное ранее наибольшее достигнутое замедление при торможении со срабатыванием антиблокировочной тормозной системы. Учет полученных данных и позволяет рассчитать периодически обновляемое ограничение скорости движения до ее наибольшего безопасного значения с помощью средств, имеющихся на борту транспортного средства.
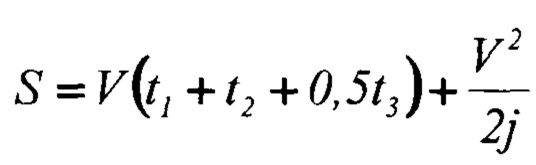
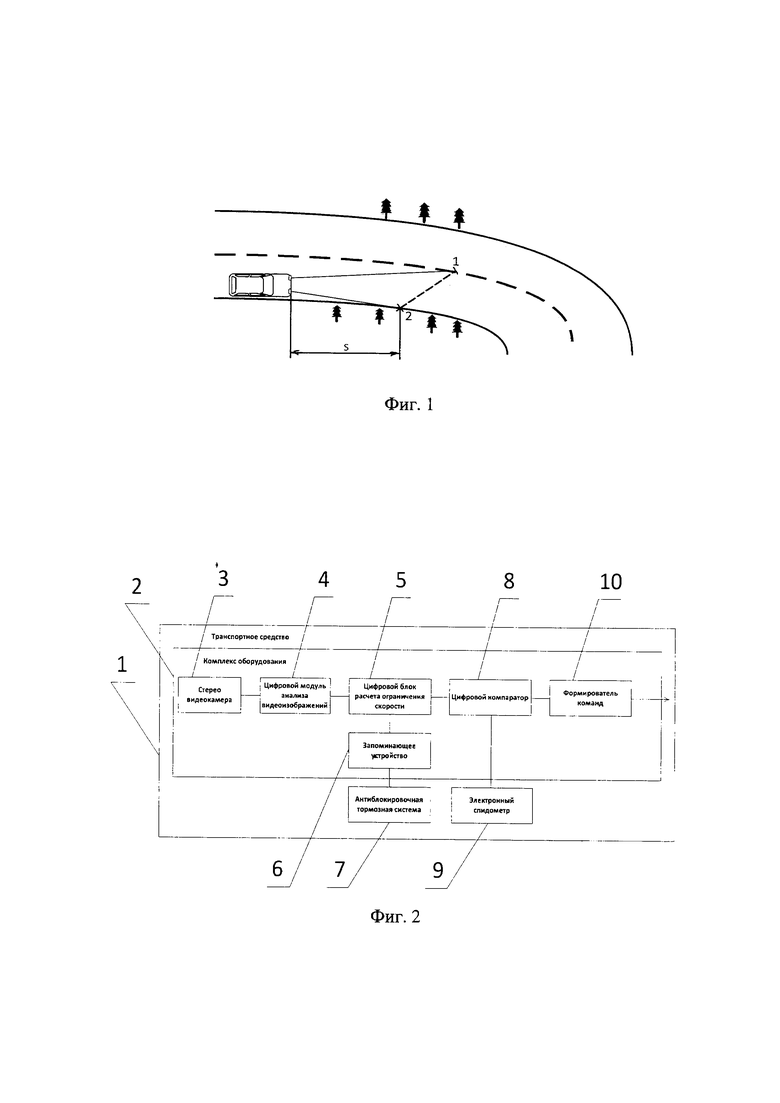
Изобретение поясняется чертежами, где на фиг. 1 представлена иллюстрация обзора криволинейного в плане участка полосы движения дороги перед транспортным средством техническими средствами видеонаблюдения; на фиг. 2 - схема комплекса технических средств обработки данных для формирования ограничения скорости движения транспортного средства.
На чертежах приняты следующие обозначения: 1-2 - положение границы освещенного головными фарами участка дороги перед транспортным средством; S - расстояние до менее удаленной из граничных точек обзора полосы движения.
Способ автоматического ограничения скорости движения транспортного средства состоит в том, что при каждом торможении со срабатыванием антиблокировочной тормозной системы запоминают в обновляемом режиме наибольшее значение достигнутого замедления транспортного средства. Это позволяет учитывать изменения тормозных свойств транспортного средства в расчете периодически обновляемого ограничения скорости движения по значению полного остановочного пути.
Зафиксированное наибольшее значение достигнутого замедления транспортного средства используют это значение для расчета периодически пересматриваемого ограничения скорости движения транспортного средства, дополнительного по отношению к дорожным ограничениям. Это обеспечивает учет изменений тормозных свойств транспортного средства, от которых зависит наибольшая безопасная скорость движения.
Рассчитанное значение ограничения сравнивают с фактической скоростью движения транспортного средства и при превышении последней формируют команду водителю или системе автоматического управления движением транспортного средства на снижение скорости. Использование данного сравнения реализует обратную связь по скорости движения, с помощью которой в автоматическом режиме осуществляется ограничение скорости до безопасного уровня.
При движении в автоматическом режиме обеспечивают обзор полосы движения дороги перед транспортным средством. Это дает возможность автоматически идентифицировать режим движения и дальность видимости полосы движения.
Программными средствами распознают свободный режим движения по полосе по признаку отсутствия лидера перед транспортным средством и когда в пределах дальности обзора отсутствует лидер, распознают наиболее удаленные точки обзора левой и правой границ полосы движения.
Далее рассчитывают дальность обзора до указанных граничных точек полосы движения. При этом по наличию разности дальностей обзора до указанных граничных точек в автоматическом режиме идентифицируют наличие ограничения обзора движения в плане дороги, вызванное кривизной траектории последней.
По данным о дальности до менее удаленной из граничных точек обзора полосы движения, принимаемой за полный остановочный путь транспортного средства, и наибольшем достигнутом замедлении транспортного средства при последнем торможении со срабатыванием антиблокировочной тормозной системы рассчитывают обновляемое ограничение скорости движения транспортного средства до наибольшего из безопасных ее значений. Рассчитанное ограничение обновляется с каждым изменением кривизны в плане полосы движения и тормозных свойств транспортного средства, зависящих от сцепления протекторов шин с дорогой и технического состояния транспортного средства.
Для этого транспортное средство снабжают средствами видеонаблюдения, автоматически формирующими оценку расстояния до наиболее удаленной границы обзора перед транспортным средством, например, излучающими, сканирующими или пассивными видеокамерами или лидарами, наименее затратным и наиболее доступным из которых для современных управляемых водителями транспортных средств является стереовидеокамера, комплектуемая цифровым модулем, снабженным программным обеспечением для распознавания и расчета дальности до наиболее удаленных точек обзора левой и правой границ полосы движения.
Значение ограничения скорости движения транспортного средства по дальности обзора полосы движения дороги перед транспортным средством рассчитывают в автоматическом режиме с помощью программного обеспечения цифрового модуля, например, объединяемого с электронным блоком управления приборной панелью современных транспортных средств. При расчете значение дальности обзора полосы движения дороги перед транспортным средством принимают за полный остановочный путь транспортного средства при торможении. Для расчета используют одну из известных формул оценки полного остановочного пути, например, формулу:
 , [м]
, [м]
где S - полный остановочный путь транспортного средства, принимаемый равным дальности обзора полосы движения;
V - значение ограничения скорости движения транспортного средства;
t1 - время реакции водителя (для беспилотных транспортных средств t1=0);
t2 - время запаздывания тормозного привода;
t3 - время нарастания замедления транспортного средства;
j - установившееся замедление транспортного средства при последнем торможении со срабатыванием антиблокировочной тормозной системы.
Причем в качестве установившегося замедления транспортного средства в расчете ограничения скорости принимают значение наибольшего замедления, зафиксированного при последнем торможении со срабатыванием антиблокировочной тормозной системы.
Превышение фактической величиной скорости движения рассчитанного ограничения в каждый момент времени используется для выработки управляющих команд на снижение скорости.
Движение с превышением рассчитанного ограничения может быть не безопасным, ввиду превышения значением полного остановочного пути фактической дальности обзора, за пределами которой может оказаться препятствие, пешеход, упавшее на дорогу дерево или вышедшее на нее животное.
Процесс ограничения скорости движения транспортного средства проводят в автоматическом режиме с использованием комплекса оборудования, размещаемого или встраиваемого в конструкцию и программное обеспечение транспортного средства (см. фиг. 2).
Транспортное средство 1 снабжают комплексом 2 оборудования, включающим в себя стереовидеокамеру 3 для обзора полосы движения перед транспортным средством согласно фиг. 1.
Стереовидеокамеру 3 снабжают подсоединяемым к ее выходу цифровым модулем 4 анализа видеоизображений и расчета дальности обзора полосы движения транспортного средства (см. фиг. 2). Выход цифрового модуля 4 подключен к одному из входов цифрового блока 5 расчета ограничения скорости движения транспортного средства, к другому входу которого подсоединен выход запоминающего устройства 6, ко входу которого подключен один из выходов штатной антиблокировочной тормозной системы 7. При этом выход цифрового блока 5 расчета ограничения скорости движения транспортного средства подсоединен к одному из входов цифрового компаратора 8, к другому входу которого подключен выход штатного цифрового спидометра 9. Выход цифрового компаратора 8 связан с входом формирователя 10 команд водителю или системе автоматического управления движением транспортного средства.
Способ автоматического ограничения скорости движения транспортного средства реализуется следующим образом.
В процессе движения дальность обзора полосы движения дороги перед транспортным средством многократно изменяется (см. фиг. 1). Это имеет место не только в плотных транспортных потоках, но и в сравнительно свободных условиях дорожного движения на кривых в плане участках дороги). Обзор полосы движения сокращают размещенные по ее сторонам естественные препятствия, зеленые насаждения, строения, припаркованные транспортные средства и дорожные машины, а темное время суток - еще и дальность освещаемого фарами участка дорожного покрытия перед транспортным средством. Многие из таких препятствий носят изменчивый характер, так что дальность обзора приходится контролировать водителям или техническим средствам транспортных средств в автоматическом режиме. Дальность обзора оценивают по расстоянию до менее удаленной граничной точки 1 или 2 полосы движения, принадлежащей границе обзора перед транспортным средством согласно фиг. 1.
При изготовлении или при эксплуатации транспортного средства 1 предварительно на последнем размещают согласно фиг. 2 комплекс оборудования 2.
При движении транспортного средства 1 стереовидеокамера 3 осуществляет циклический обзор полосы движения перед транспортным средством, а цифровой модуль 4 анализа видеоизображений периодически идентифицирует в автоматическом режиме левую и правую граничные точки полосы движения, наиболее удаленные от транспортного средства, и рассчитывает дальность до них согласно фиг. 1.
С периодическим поступлением с выхода цифрового модуля 4 на вход цифрового блока 5 последний запрашивает из запоминающего устройства 6 значение замедления, зафиксированное при последнем торможении со срабатыванием антиблокировочной тормозной системы 7. По значениям дальности обзора полосы движения перед транспортным средством и замедления при торможении, зафиксированного при последнем торможении со срабатыванием антиблокировочной тормозной системы 7, цифровой блок 5 рассчитывает ограничение скорости движения транспортного средства. С выхода цифрового блока 5 рассчитанное значение ограничения скорости движения транспортного средства поступает на один из входов цифрового компаратора 8, на другой вход которого поступает с выхода спидометра 8 сигнал скорости движения транспортного средства. С выхода спидометра 8 сигнал разности значений фактической скорости движения и рассчитанного ее ограничения поступает на вход формирователя 10 команд водителю или системе автоматического управления движением транспортного средства. При превышении фактической скорости движения над рассчитанным значением ее ограничения, формирователь 10 выдает пропорциональные превышению команды на снижение скорости.
Периодически обновляемая оценка ограничения скорости движения транспортного средства в зависимости от дальности обзора полосы движения дороги и изменяющегося наибольшего достижимого замедления транспортного средства применима для поддержания наиболее высокого из числа безопасных уровня скорости движения. Это обеспечит наибольшую эффективность перевозочной работы при обеспечении безопасности дорожного движения.
Таким образом, изобретение обеспечивает решение технической задачи автоматического формирования изменяющихся в процессе движения транспортного средства оценок ограничения скорости движения до наибольшего из безопасных уровней по условиям дальности обзора дороги и тормозных свойств транспортного средства.
Источники информации, принятые во внимание:
1. Патент РФ №2529594, МПК G01C 3/08, опуб. 2011 г.
2. Ограничитель скорости автомобиля. - URL: https://abiznews.net/novosti/ogranitchitely-skorosti-avtomobilya/
3. Патент РФ №737274, МПК В60Т 17/22; G01M 17/00, опуб. 1980 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСПРАВНОСТИ РАБОЧЕЙ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И ВОССТАНОВЛЕНИЯ МЕХАНИЗМА ДОРОЖНО-ТРАНСПОРТНОГО ПРОИСШЕСТВИЯ И УСТРОЙСТВО "ЧЕРНЫЙ ЯЩИК" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2519188C2 |
| Способ автоматического регулирования пучков света головных фар транспортного средства | 2023 |
|
RU2808589C1 |
| Способ предотвращения столкновений со встречным препятствием на полосе движения | 2022 |
|
RU2788652C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| СПОСОБ ИНДИКАЦИИ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2502616C2 |
| СПОСОБ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2005 |
|
RU2304531C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2631543C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |
| Способ управления работой системы активной безопасности транспортных средств | 2018 |
|
RU2704357C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2702877C1 |
Изобретение относится к автомобилестроению. В способе автоматического ограничения скорости движения транспортного средства запоминают в обновляемом режиме наибольшее значение достигнутого замедления при каждом торможении со срабатыванием антиблокировочной тормозной системы. Затем используют это значение для расчета периодически пересматриваемого ограничения скорости движения. Обеспечивают обзор полосы движения перед транспортным средством, где распознают свободный режим движения по полосе по признаку отсутствия лидера перед транспортным средством, а также распознают наиболее удаленные точки обзора левой и правой границ полосы движения. После этого рассчитывают дальность обзора до указанных точек, идентифицируют наличие ограничения обзора движения в плане дороги по наличию разности дальностей обзора до указанных точек и рассчитывают ограничение скорости движения транспортного средства по дальности до менее удаленной точки, принимаемой за полный остановочный путь транспортного средства при торможении с замедлением, зафиксированным при последнем торможении со срабатыванием антиблокировочной тормозной системы. Повышается безопасность движения. 2 ил.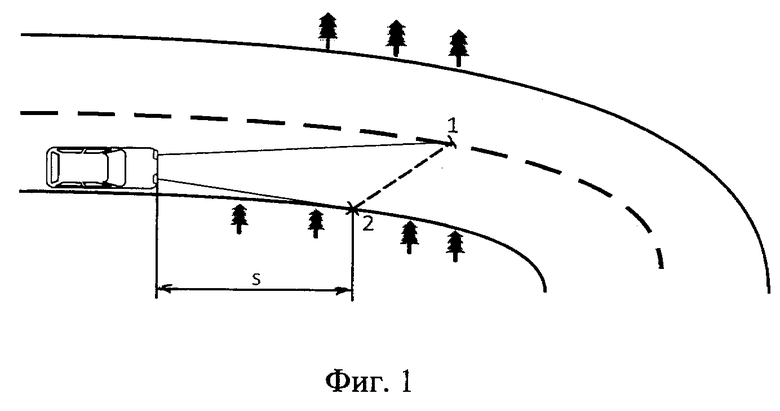
Способ автоматического ограничения скорости движения транспортного средства, заключающийся в том, что запоминают в обновляемом режиме наибольшее значение достигнутого замедления транспортного средства при каждом торможении со срабатыванием антиблокировочной тормозной системы и используют это значение для расчета периодически пересматриваемого ограничения скорости движения транспортного средства, дополнительного по отношению к дорожным ограничениям, сравнивают рассчитанное значение ограничения с фактической скоростью движения транспортного средства и при превышении последней формируют команду водителю или системе автоматического управления движением транспортного средства на снижение скорости, отличающийся тем, что в автоматическом режиме обеспечивают обзор полосы движения дороги перед транспортным средством, распознают свободный режим движения по полосе по признаку отсутствия лидера перед транспортным средством, а также распознают наиболее удаленные точки обзора левой и правой границ полосы движения, далее рассчитывают дальность обзора до указанных граничных точек полосы движения, идентифицируют наличие ограничения обзора движения в плане дороги по наличию разности дальностей обзора до указанных граничных точек и рассчитывают ограничение скорости движения транспортного средства по дальности до менее удаленной из указанных граничных точек, принимаемой за полный остановочный путь транспортного средства при торможении с замедлением, зафиксированным при последнем торможении со срабатыванием антиблокировочной тормозной системы.
| Устройство для определения величины динамического ограничения скорости движения автомобиля | 1978 |
|
SU737274A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ КОРРЕКТИРОВКИ СКОРОСТИ АВТОМОБИЛЯ | 2018 |
|
RU2708801C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА С СОДЕЙСТВИЕМ ВОЖДЕНИЮ | 2017 |
|
RU2735746C1 |
| DE 102019215815 A1, 14.05.2020 | |||
| DE 102009034931 B4, 16.08.2018. | |||

