Изобретение относится к усовершенствованному вилочному держателю, который имеет улучшенный эксплуатационный контроль и предназначен для использования в телескопических погрузчиках или «телепогрузчиках».
В данной области техники известно приспособление, обычно называемое «вилы» или «вилка», которое предназначено для установки на телескопической рабочей стреле телескопического погрузчика для того, чтобы перемещать грузы.
Данное приспособление имеет каркас или раму, на профессиональном жаргоне называемую «вилочный держатель», к которому присоединены вилы, иными словами устройство, оснащенное зубьями для насаживания поддонов или тюков сена на вилы.
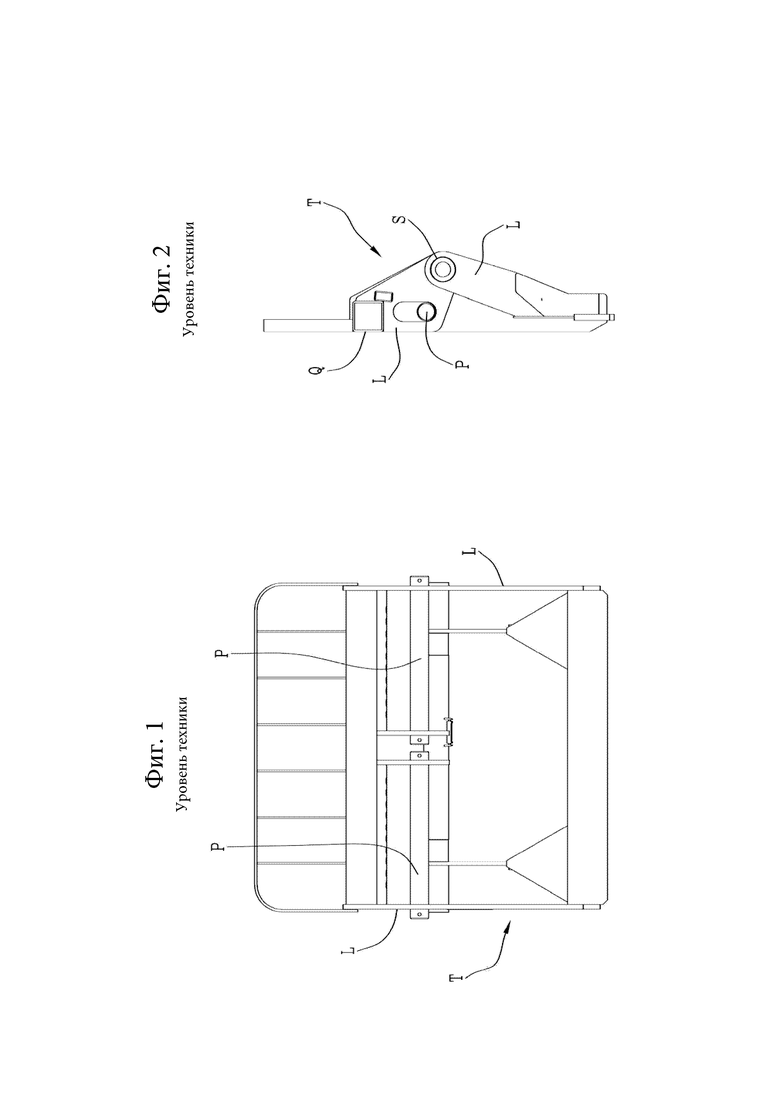
Более подробно, как показано на фиг. 1 и 2, в известном из уровня техники решении зубья вил с возможностью скольжения установлены на одном или более опорных штифтов Р, вставленных в соответствующие пазы боковых пластин L вилочного держателя Т.
Известная из уровня техники рама Т вилочного держателя, которая также может продаваться отдельно, является прямоугольной и имеет толстую верхнюю трубчатую поперечину Q, например, имеющую четырехугольное поперечное сечение, которая соединяет верхние части указанных выше боковых пластин L.
Кроме того, на задней стороне и в нижнем положении относительно пазов, рама Т имеет зажимной трубчатый элемент S, который с возможностью отсоединения присоединен к крепежному устройству, имеющемуся на рабочей стреле.
Хотя данное решение в настоящее время используется на практике, оно имеет некоторые недостатки, которые, в некоторых обстоятельствах, усложняют его использование и которые описаны далее.
Чтобы иметь возможность правильно разместить вилы в расположенном на земле грузе, оператору телескопического погрузчика нужно хорошо видеть груз и видеть, как концы зубьев вил расположены относительно груза, чтобы правильно вставить их в нижний поддон.
Однако, конструкция существующих вилочных держателей Т имеет некоторые элементы, которые препятствуют обзору, а именно: боковые пластины рамы L, верхняя поперечина Q и скользящие штифты Р двух вилок.
Более подробно, так как в телескопических погрузчиках кабина установлена рядом с рабочей стрелой и, следовательно, смещена от центра относительно приспособления, одна из двух боковых панелей L всегда частично загораживает обзор.
Конфигурация известных вилочных держателей иногда вынуждает оператора во время подготовки к размещению вил в грузе выполнять некоторые действия для наклона и перемещения приспособления, чтобы иметь надлежащее представление о взаимном расположении концов зубьев вил и поддона в нижней части груза.
Эти манипуляции неудобны, и, следовательно, в данной области есть необходимость в телескопическом погрузчике, имеющем улучшенный обзор, который превосходит уровень техники.
Технической целью, лежащей в основе данного изобретения, является создание усовершенствованного вилочного держателя для телескопических погрузчиков, который удовлетворил бы указанную выше потребность.
Указанная цель достигается с помощью изобретения по п. 1.
Другие признаки и преимущества изобретения будут более понятны при ознакомлении с неограничивающим описанием предпочтительного варианта выполнения приспособления, которое содержит предлагаемый вилочный держатель, как показано на прилагаемых чертежах, на которых:
Фиг. 1 и 2 изображают, соответственно, вид спереди и вид сбоку вилочного держателя, известного из уровня техники,
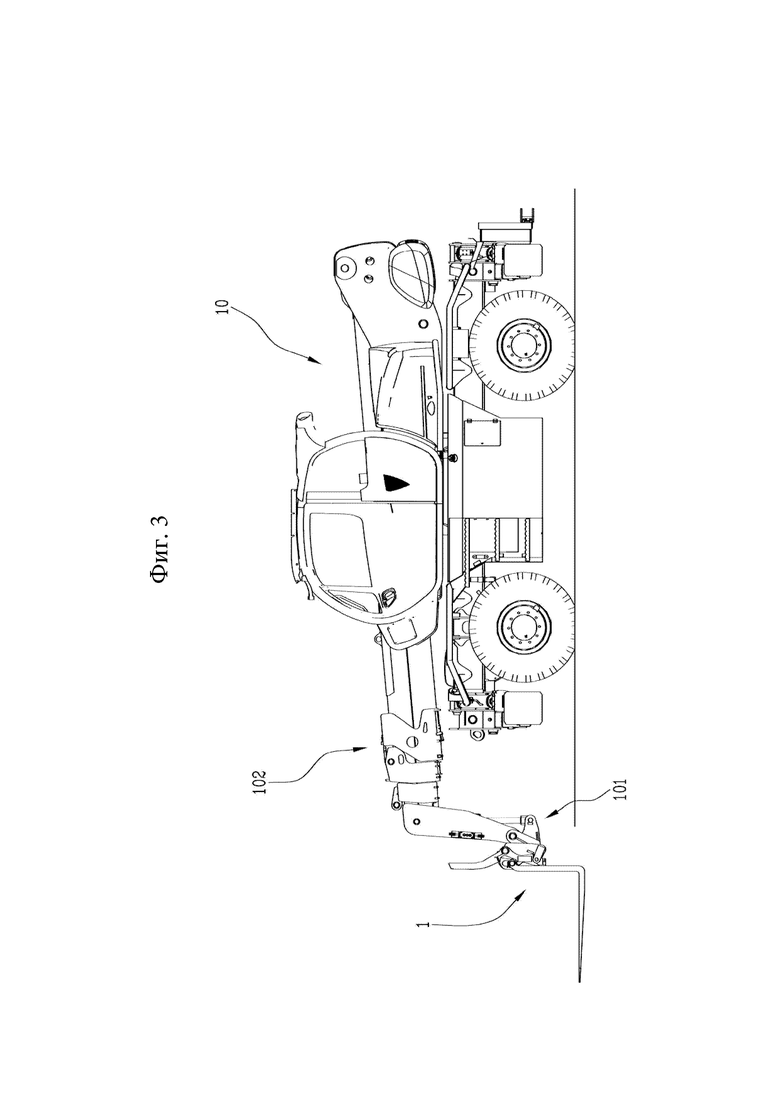
Фиг. 3 изображает вид сбоку устройства согласно изобретению, когда оно прикреплено к рабочей стреле телескопического погрузчика,
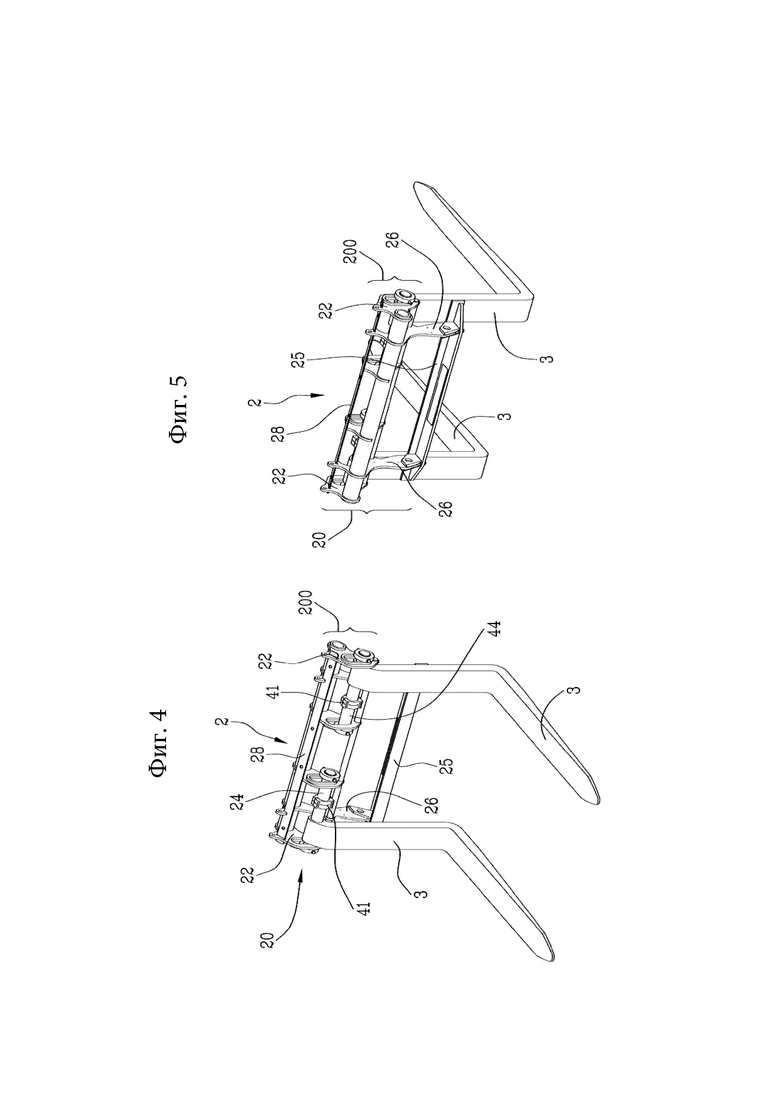
Фиг. 4 и 5 изображают вид в аксонометрии устройства согласно изобретению,
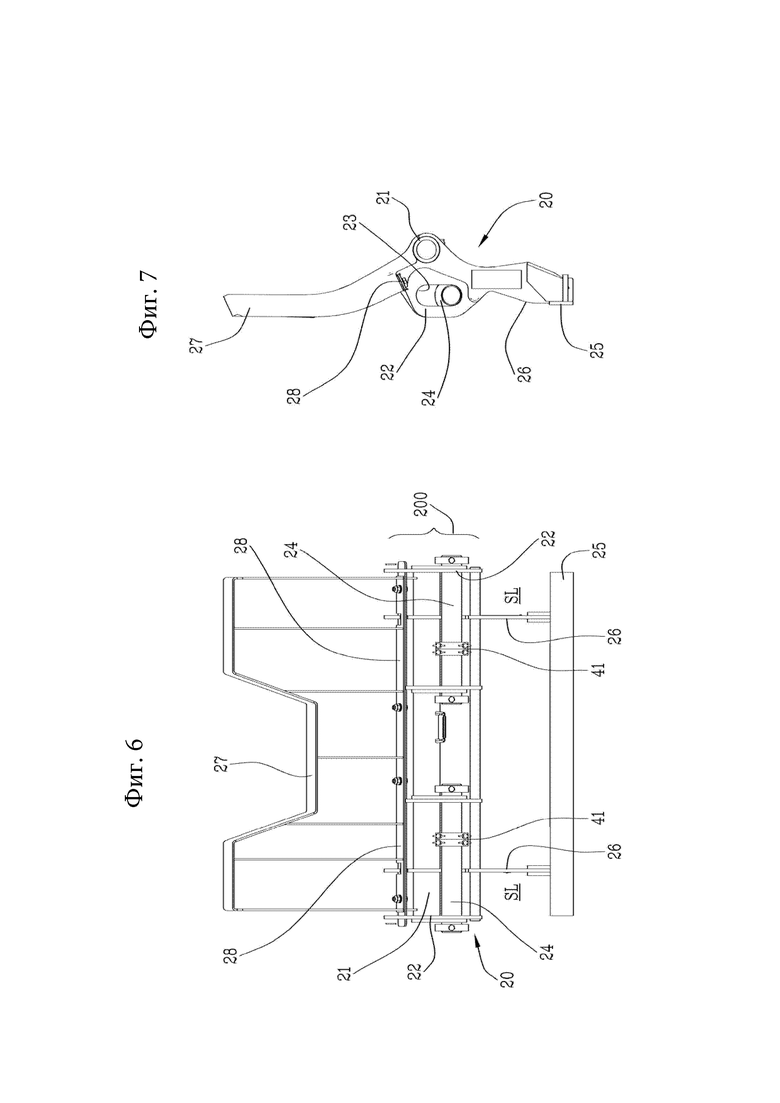
Фиг. 6 и 7 изображают, соответственно, вид спереди и вид сбоку вилочного держателя согласно изобретению.
Со ссылкой на прилагаемые чертежи, номер 1 позиции обозначает целиком все приспособление для телескопического погрузчика 10, которое содержит вилочный держатель 2 согласно изобретению и зубья 3 вил, удерживаемые указанным держателем.
Предложенный вилочный держатель 2 содержит опорную раму 20, предназначенную для прикрепления с возможностью съема к зацепляющему устройству 101, расположенному на дальнем конце рабочей стрелы 102 телескопического погрузчика 10.
Более подробно, рама 20, предпочтительно имеющая решетчатую структуру, прикреплена к рабочей стреле 102 на своей задней стороне, а зубья 3 установлены на ее передней стороне (см. фиг. 3).
Следует отметить, что выражение «на передней стороне» применительно к вилочному держателю 2 обозначает его сторону (или поверхность), противоположную машине 10 и стреле 102, в то время как выражение «на задней стороне» обозначает противоположную сторону.
По существу, при использовании в описании терминов «передний», «торцевой», «впереди», «задний», «верхний», «нижний», «боковой», «вертикальный» или «горизонтальный» в отношении всего приспособления согласно изобретению или в отношении его элементов, имеется в виду то, как указанное приспособление расположено в пространстве во время его эксплуатации, иными словами, когда оно соединено с упомянутым выше соединительным устройством 101.
Опорная рама 20 содержит верхний узел 200, содержащий горизонтальный зажимной стержень 21, выполненный с возможностью разъемного прикрепления к соединительному устройству 101 рабочей стрелы 102. Предпочтительно, зажимной стержень 21 представляет собой круглый трубчатый элемент, расположенный в задней части вилочного держателя 2, в верхней части указанного узла 200.
Зубья 3 вил, которые могут иметь показанную на чертежах L-образную форму, подвешены спереди на раме 2 и, следовательно, имеют горизонтальную часть и вертикальную часть.
Более конкретно, верхний узел 200 рамы 2 содержит две боковые пластины 22, которые расположены вертикально и имеют соответствующие пазы 23 для размещения в них одной или более осей 24 подвески вил (см. фиг. 7).
По существу, в пазах 23, которые расположены ниже заднего зажимного трубчатого элемента 21, вставлены оси 24 подвески, которые удерживают зубья 3 с возможностью скольжения и поворота; более подробно, оси 24 вставлены в сквозное отверстие, имеющееся в верхнем конце соответствующего вертикального сегмента зубьев 3, при этом два зажима 41, которые могут быть с возможностью съема соединены с осями 24, например с помощью барашковых винтов, могут фиксировать зубья 3 относительно боковых пластин 22, имеющих указанные пазы 23.
Еще более подробно, оси 24 подвески расположены в раме 20 в переднем положении относительно зажимного стержня 21.
Рама 20 вилочного держателя 2 имеет по меньшей мере один нижний контактный элемент 25, который расположен параллельно зажимному стержню 21 и выполнен с возможностью упора в заднюю часть зубьев 3 вил; предпочтительно контактный элемент представляет собой пластину 25, длина которой проходит горизонтально, а ширина вертикально, и которая расположена за зубьями 3 и под верхним узлом 200.
Согласно важному аспекту изобретения, рама 20 имеет один или более соединительных элементов 26, которые являются единственными элементами, соединяющими верхний узел 200 рамы с контактным элементом 25, и которые расположены в пределах поперечных размеров опорной рамы 20.
Иными словами, рама 20 согласно изобретению, в отличие от известного уровня техники, не имеет концевых поперечных стоек, определяющих габаритный размер и соединяющих соединительную зону зубьев 3 с нижней контактной частью зубьев 3.
Для вилочного держателя 2 согласно изобретению, напротив, соединение между контактной пластиной 25 для зубьев 3 и верхним узлом 200, соединяющим устройство 1 с соединительным устройством 101 и удерживающим зубья 3, обеспечено с помощью только указанных выше соединительных элементов 26, предпочтительно содержащих вертикальные пластины, поперечные контактной платине 25, благодаря чему остаются свободными два поперечных пространства SL между верхним узлом 200 и контактной пластиной 25 (см. в частности фиг. 6).
Преимущественно, это позволяет оператору в кабине видеть с меньшими помехами конец зубьев 3 и груз, в отличие от известного уровня техники, в котором, как указано во вводной части, по меньшей мере одна из боковых панелей всегда находится в положении, закрывающем обзор оператору.
Предпочтительно, оси 24 подвески зубьев 3, параллельные зажимному стержню 21, определяют вместе с указанным стержнем общую плоскость, наклоненную вниз в переднем направлении.
Таким образом, при использовании, оси 24 и зажимной стержень 21 частично или полностью расположены выше относительно точки зрения оператора, что также уменьшает количество элементов, которые перекрывают свободный обзор зубьев 3 и груза, который нужно поднять.
Фактически, указанная выше общая плоскость осей 24 и зажимного стержня 21 проходит под углом к горизонтальной плоскости, в которой лежат упомянутые выше горизонтальные части зубьев 3, и предпочтительно образует с указанными частями угол от 0 до 30 градусов.
И наконец, в соответствии с аспектом, ранее описанным в заявке ЕР 3683184, поданной этим же заявителем и поэтому включенной в данное описание посредством ссылки в отношении данного признака, рама 20 имеет верхнюю пластину 28, на которой установлена несущая нагрузку решетка 27 и которая наклонена вниз в переднем направлении так, чтобы не загораживать оператору обзор концов зубьев и нагрузки или загораживать как можно меньше.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ ИНСТРУМЕНТА САМОХОДНОЙ РАБОЧЕЙ МАШИНЫ И ПРИСПОСОБЛЕНИЕ С ИНСТРУМЕНТОМ ДЛЯ САМОХОДНОЙ РАБОЧЕЙ МАШИНЫ | 2020 |
|
RU2787523C2 |
| ВЕСЫ ВИЛОЧНОГО ПОГРУЗЧИКА | 2009 |
|
RU2495817C2 |
| РАБОЧАЯ ПЛАТФОРМА НА ВИЛОЧНОМ ПОГРУЗЧИКЕ | 1991 |
|
RU2021972C1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО К ВИЛОЧНОМУ ПОГРУЗЧИКУ | 1971 |
|
SU312825A1 |
| Грузоподъемник вилочного погрузчика | 1990 |
|
SU1730024A1 |
| Погрузчик | 1986 |
|
SU1493608A1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ВИЛОЧНОГО ПОГРУЗЧИКА | 2010 |
|
RU2547024C2 |
| ПАЛЛЕТНЫЙ КОНТЕЙНЕР | 2013 |
|
RU2633243C2 |
| Передвижная мачта освещения телескопического типа | 2022 |
|
RU2795671C1 |
| Устройство для перегрузки сыпучего груза вилочным погрузчиком | 1986 |
|
SU1350108A1 |
Изобретение относится к области машиностроения. Предложен вилочный держатель (2) для телескопического погрузчика, содержащий раму (20) для удерживания вил, имеющую верхний узел (200), содержащий зажимной стержень (21), который при использовании расположен горизонтально и выполнен с возможностью разъемного прикрепления к соединительному устройству (101), установленному на рабочей стреле (102) телескопического погрузчика (10), и нижний контактный элемент (25), выполненный с возможностью контакта с задней частью зубьев (3) вил, причем верхний узел (200) соединен с контактным элементом (25) только с помощью одного или более соединительных элементов (26), которые расположены в пределах поперечных размеров опорной рамы (20). Достигается улучшение обзора. 2 н. и 4 з.п. ф-лы. 7 ил.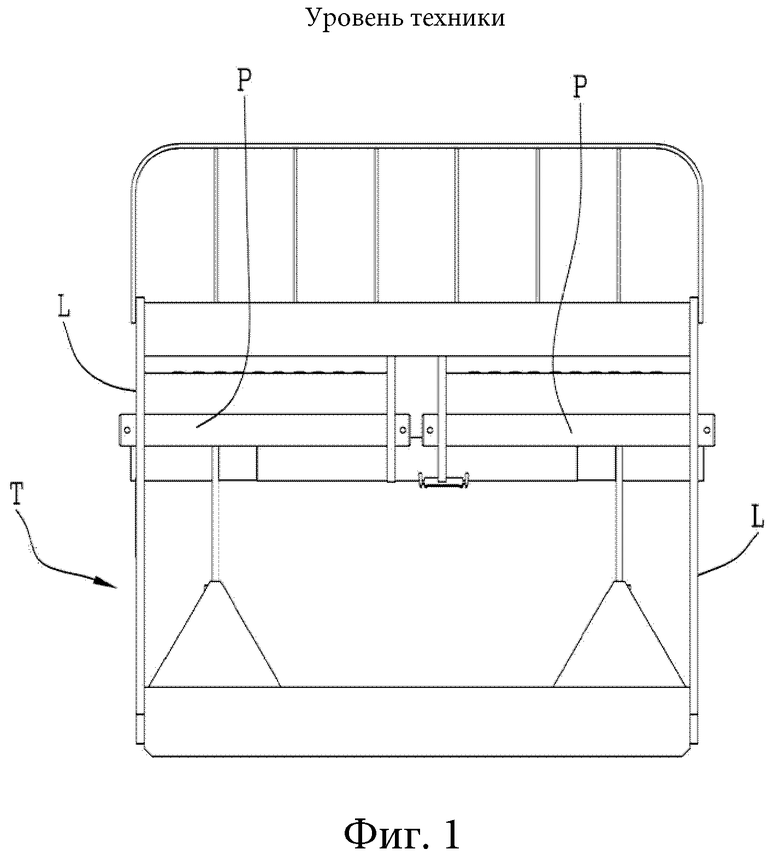
1. Вилочный держатель (2) для телескопического погрузчика, содержащий раму (20) для удерживания вил, имеющую верхний узел (200), содержащий зажимной стержень (21), который при использовании расположен горизонтально и выполнен с возможностью разъемного прикрепления к соединительному устройству (101), установленному на рабочей стреле (102) телескопического погрузчика (10), и по меньшей мере один нижний контактный элемент (25), выполненный с возможностью упора в заднюю часть зубьев (3) указанных вил, причем указанный верхний узел (200) соединен с указанным контактным элементом (25) только с помощью одного или более соединительных элементов (26), которые расположены в пределах поперечных размеров указанной опорной рамы (20).
2. Вилочный держатель (2) по п.1, в котором указанный контактный элемент выполнен в виде контактной пластины (25), длина которой проходит горизонтально, а ширина вертикально.
3. Вилочный держатель (2) по п.1 или 2, в котором указанный верхний узел (200) содержит две боковые пластины (22), расположенные вертикально и имеющие соответствующие пазы (23) для размещения одной или более осей (24) подвески вил, причем пазы (23) по меньшей мере частично расположены ниже зажимного стержня (21).
4. Приспособление (1) для телескопического погрузчика (10), содержащее вилочный держатель (2) по п.3, имеющий одну или более осей (24) подвески, которые вставлены в указанные пазы верхнего узла (200) рамы (20) вилочного держателя (2) и удерживают зубья (3), которые также являются частью приспособления (1), причем указанные оси (24) параллельны зажимному стержню (21) и образуют с указанным стержнем общую плоскость, наклоненную вниз в переднем направлении.
5. Приспособление по п.4, в котором указанная общая плоскость указанных осей (24) и зажимного стержня (21) проходит под углом к плоскости горизонтальных частей зубьев (3).
6. Приспособление по п.5, в котором общая плоскость указанных осей (24) и зажимного стержня (21) образует с плоскостью горизонтальных частей зубьев (3) угол от 0 до 30 градусов.
| EP 0816282 A1, 07.01.1998 | |||
| СПОСОБ ОПТИМИЗАЦИИ ТРАЕКТОРИИ ПОЛЁТА ПОДВИЖНОГО ОБЪЕКТА ПРИ ПРОВЕДЕНИИ АЭРОГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2592042C1 |
| Вилочный захват к погрузчику | 1983 |
|
SU1158489A1 |

