Уровень техники
Настоящее изобретение относится к весам для использования с погрузчиком с вилами или вилочным погрузчиком. Более конкретно, настоящее изобретение относится к весам, которые могут быть установлены на вилочном погрузчике и использованы для взвешивания грузов, помещенных на его вилы.
Вилочный погрузчик является хорошо известным типом промышленного оборудования. Обычные вилочные погрузчики включают в себя основной узел погрузчика, который включает в себя двигатель/электродвигатель и другие компоненты трансмиссии, кабину или другое место сидения/управления для оператора, мачту, которая поднимается и опускается посредством гидравлической энергии, каретку, которая присоединена к мачте и перемещается с ней, и пару вил, которые присоединены к каретке и используются для подъема и перемещения различных грузов.
Вилочные погрузчики могут быть найдены практически в любом месте, где объекты, в особенности тяжелые объекты, перемещаются на постоянной основе. Например, на заводе, вилочные погрузчики могут быть использованы для перемещения различного оборудования или доставки материалов. На складе или подобном месте вилочные погрузчики могут быть использованы для загрузки/разгрузки грузовиков или других транспортных контейнеров и для перемещения паллет с товаром на различные места для хранения, например, на складские стеллажи.
В некоторых местах, желательно или необходимо знать вес груза, помещенного на вилы вилочного погрузчика. Например, при загрузке или разгрузке товаров, продаваемых на вес, может быть желательным или необходимым взвесить товар, пока он находится на паллете или связан с другим транспортным приспособлением. С этой целью часто применяются весы, такие как весы для паллет. При использовании, оператор вилочного погрузчика переносит груз к весам, располагает груз на весовой платформе и либо опускает вилы достаточно, для того чтобы лишить груз опоры, либо извлекает вилы из груза, например, перемещением вилочного погрузчика в обратном от него направлении. После определения веса груза вилочный погрузчик снова зацепляет груз, и груз перемещается к следующему месту назначения.
В то время как такая система и процедура работают для обеспечения веса грузов, перемещаемых вилочным погрузчиком, легко понять, что такая система и процедура является трудоемкой и требует собственной площади пола. То есть, помимо обеспечения одного или более подходящих весов для взвешивания грузов, представляющих интерес, каждые весы должны быть размещены в месте, имеющем достаточную площадь окружающего пола, чтобы позволить достаточный доступ вилочному погрузчику. Более того, использование таких весов добавляет дополнительный этап в транспортировке каждого такого груза, который необходимо взвесить таким образом. Такой недостаток может показаться незначительным в случае одиночного груза. Однако, когда рассматривается множество грузов, которые необходимо переместить и взвесить таким образом, очевидно, что такая система и способ являются весьма неэффективными.
С этой целью, взвешивание груза, пока груз поддерживается вилами вилочного погрузчика, является желаемой возможностью. С этой целью, были разработаны различные весы для присоединения к вилочному погрузчику. Однако все такие весы, о которых заявитель осведомлен, имеют один или более недостаток, который делает их использование проблематичным. Например, некоторые из таких известных весов значительно загораживают обзор оператору, когда мачта соответствующего вилочного погрузчика расположена в поднятом положении, тое есть в положении, обычно занимаемом мачтой во время перемещения груза. Другие из таких весов сложны в установке на вилочные весы и/или в настройке уже установленных. Другие весы вырабатывают неточные показания по одной или нескольким причинам, таким как, вследствие изгибания весов или участков вилочного погрузчика, к которым весы присоединяются. Еще одни весы требуют выполнения сложной и трудоемкой операции установки уровня после установки весов и перед их использованием. Весы согласно настоящему изобретению устраняют эти недостатки.
Краткое описание изобретения
Весы вилочного погрузчика обеспечивают взвешивание груза, пока он поддерживается вилами соответствующего вилочного погрузчика. Весы вилочного погрузчика настоящего изобретения приспособлены для легкой установки, не требуя какой-либо модификации вилочного погрузчика.
Весы вилочного погрузчика согласно настоящему изобретению включают в себя жесткий узел рамы, выполненный с возможностью присоединения к вилочному погрузчику. В некоторых вариантах выполнения, весы согласно настоящему изобретению могут быть установлены в вилочный погрузчик, простым удалением вил с подъемной каретки, и подвешиванием узла рамы к подъемной каретке на место вил. Вилы затем могут быть последовательно присоединены к передней части узла рамы, например, аналогично тому, как они обычно присоединяются к подъемной каретке, или иным образом.
Узел рамы включает в себя переднюю раму и заднюю раму. Задняя рама смонтирована к подъемной каретке вилочного погрузчика. Передняя рама связана с задней рамой и включает в себя устройство для присоединения и навешивания вил вилочного погрузчика на нее. Передняя рама выполнена с возможностью вертикального смещения относительно задней рамы на некоторое ограниченное расстояние.
Узел рамы образует по существу полый треугольник, тем самым, обеспечивая смотровое окно, через которое оператор может смотреть, когда управляет соответствующим вилочным погрузчиком. Датчики нагрузки расположены сбоку наружу с левой и правой сторон от смотрового окна. Датчики нагрузки установлены между передней и задней рамами, так чтобы реагировать на грузы, помещенные на вилы, связанные с весами настоящего изобретения.
Когда нагрузка прикладывается к вилам, создаются сдвигающие усилия. Результирующее перемещение вниз, связанное со сдвигом, передней рамы относительно задней рамы регистрируется датчиками нагрузки. Выходные сигналы датчиков нагрузки используются для определения нагрузки на вилах.
Прикладывание нагрузки к вилам также создает продольный изгибающий момент. Изгибающий момент приводит к растягивающим усилиям возле верхней части узла рамы и сжимающим усилиям возле нижней части рамы в сборе. Специальные изгибаемые элементы, присоединенные между передней рамой и задней рамой, используются для переноса этих усилий на нижнюю раму. Изгибаемые элементы приспособлены быть достаточно прочными, чтобы выдерживать растягивающее и сжимающее изгибание, но достаточно торсионно слабыми в вертикальном направлении, чтобы не влиять на смещение вниз передней рамы, когда груз помещен на вилы, присоединенные к весам. Сопротивление изгибаемых элементов вертикальному смещению передней рамы может регулироваться, как описано более подробно далее.
Краткое описание чертежей
Помимо признаков, упомянутых выше, другие аспекты настоящего изобретения будут легко понятны из следующих описаний чертежей и примеров вариантов выполнения, причем ссылочные позиции на нескольких видах относятся к одинаковым или эквивалентным признакам. На чертежах:
Фиг.1a - вид спереди в перспективе примера варианта выполнения собранных весов вилочного погрузчика согласно настоящему изобретению;
Фиг.1b - вид сзади в перспективе весов вилочного погрузчика с Фиг.1;
Фиг.2 - вид спереди в перспективе с разнесением деталей вилочного погрузчика с Фиг.1;
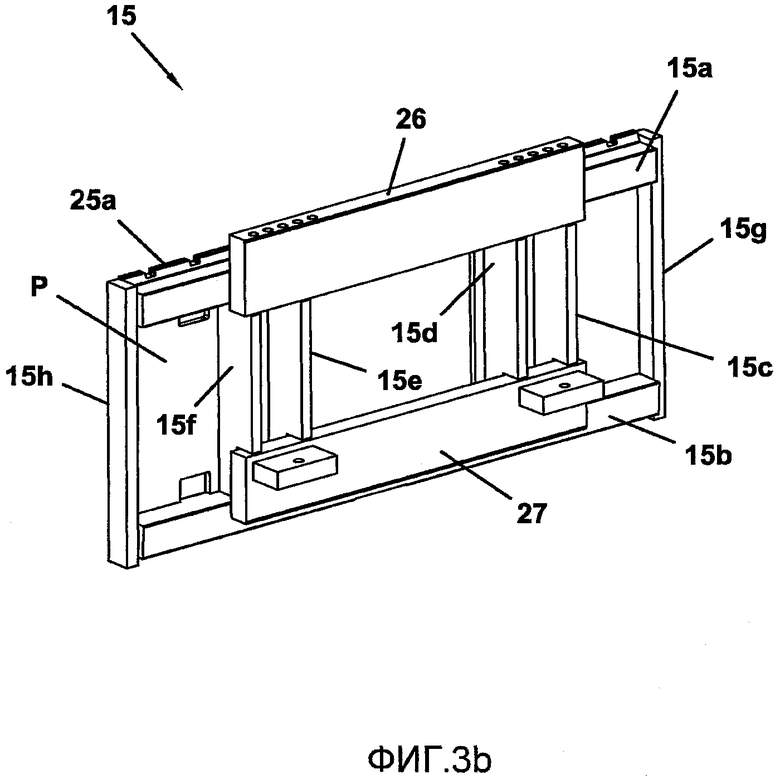
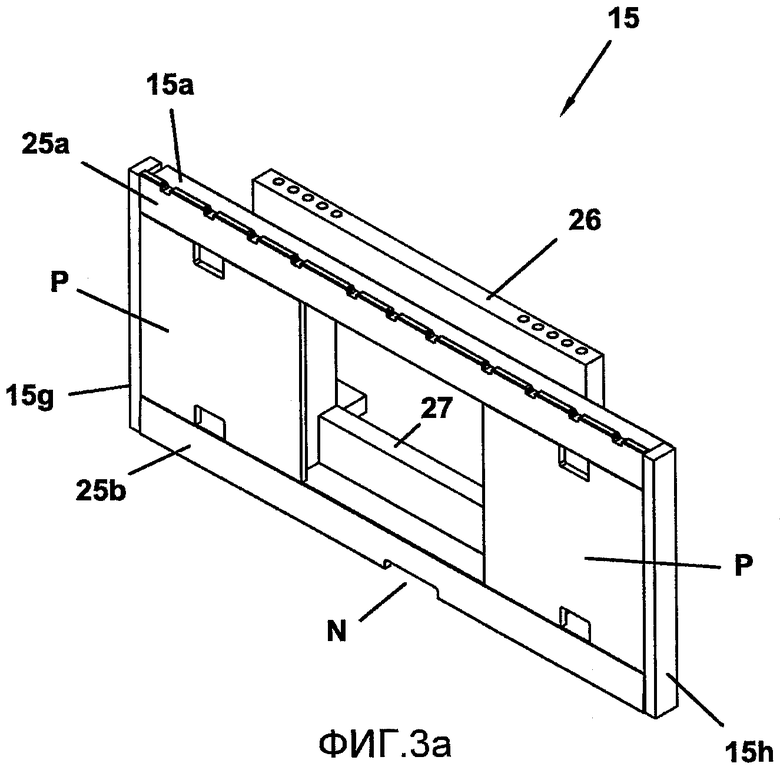
Фиг.3a - вид спереди в перспективе участка передней рамы весов вилочного погрузчика с Фиг.1;
Фиг.3b - вид сзади в перспективе участка передней рамы весов вилочного погрузчика с Фиг.1;
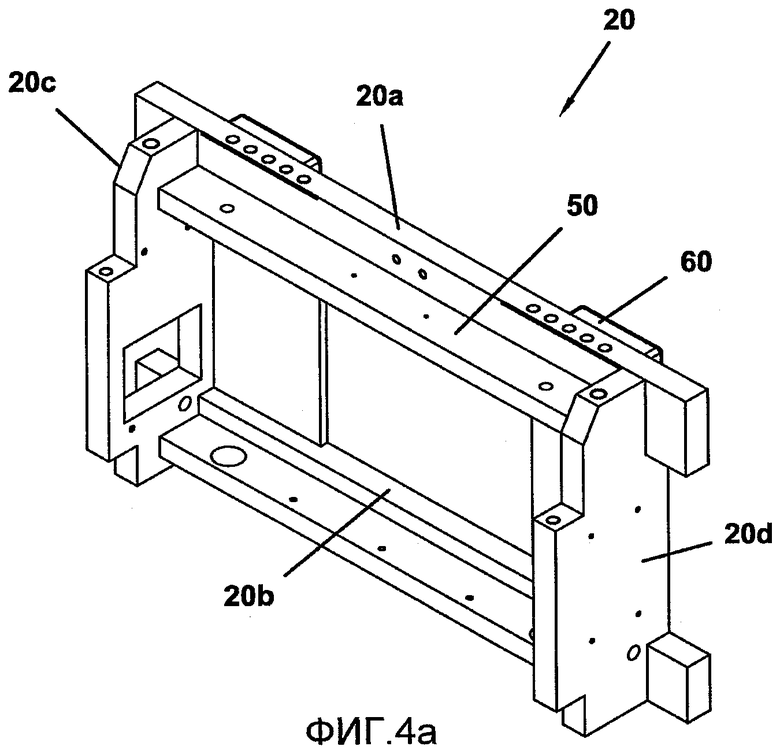
Фиг.4a - вид спереди в перспективе участка задней рамы весов вилочного погрузчика с Фиг.1;
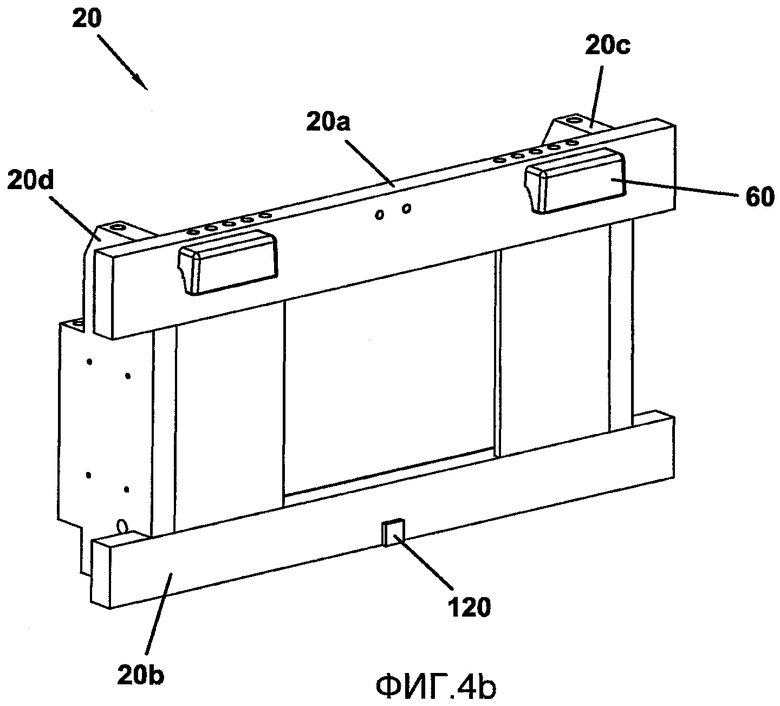
Фиг.4b - вид сзади в перспективе участка задней рамы весов вилочного погрузчика с Фиг.1;
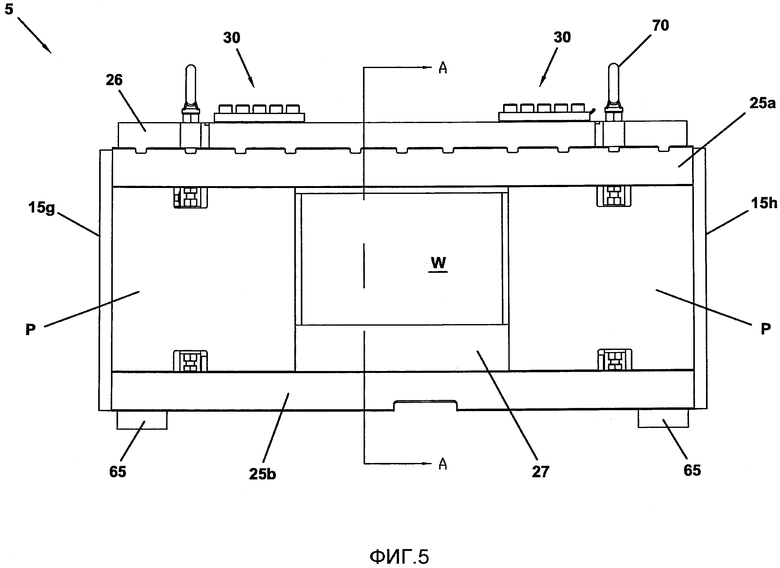
Фиг.5 - вид спереди весов вилочного погрузчика с Фиг.1;
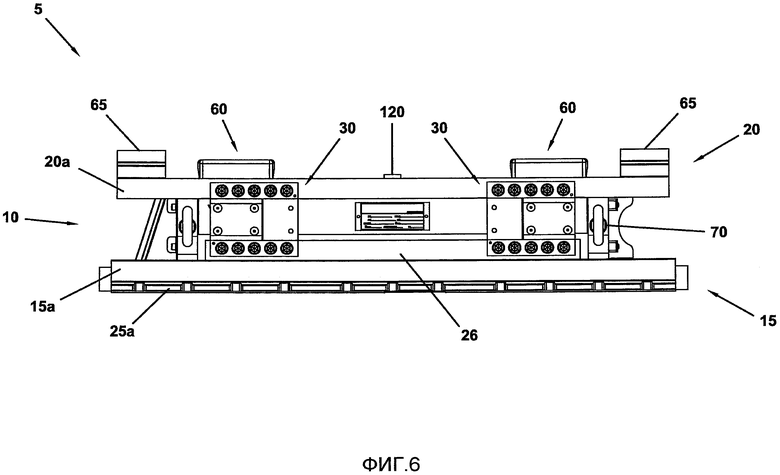
Фиг.6 - вид сверху весов вилочного погрузчика с Фиг.1;
Фиг.7 - вид снизу весов вилочного погрузчика с Фиг.1;
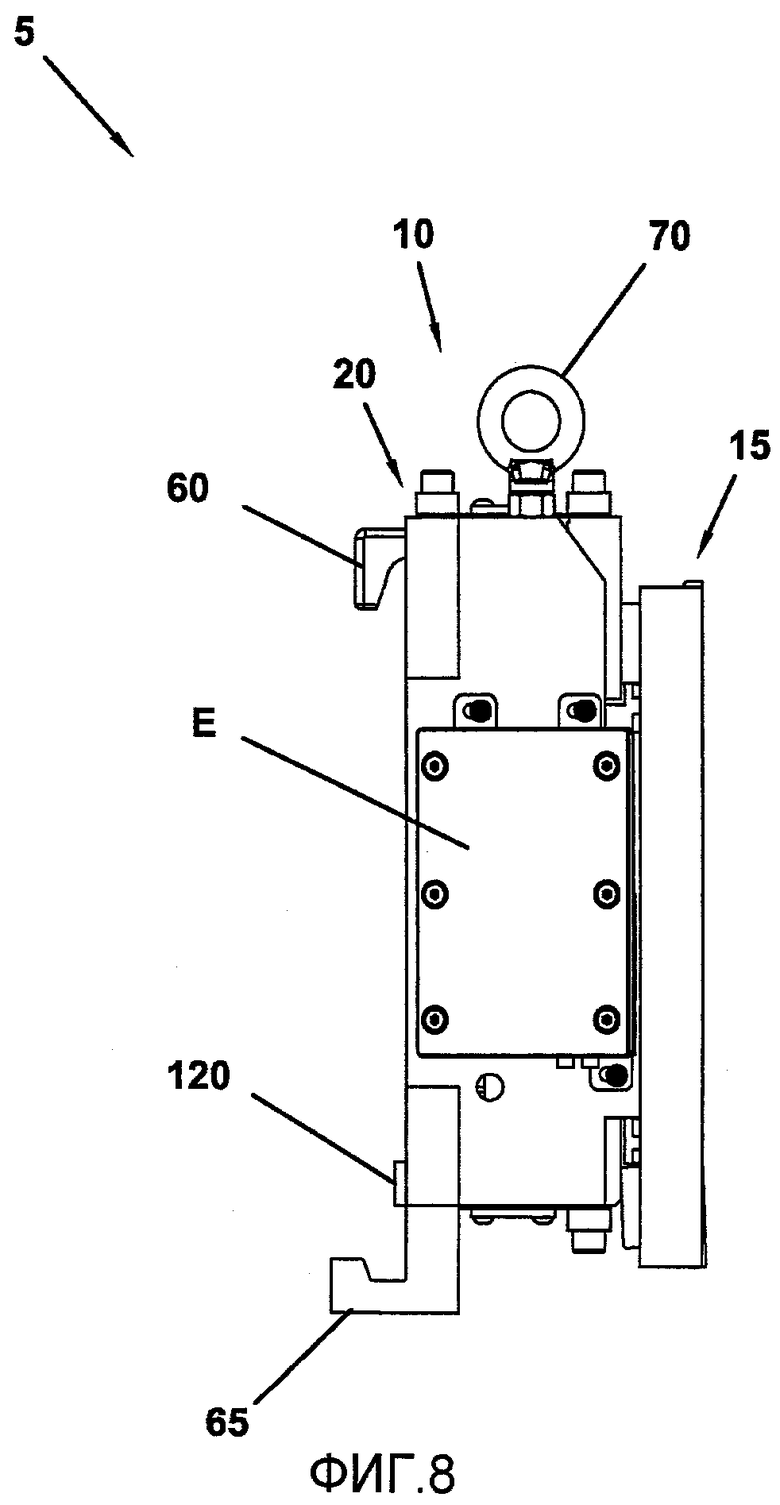
Фиг.8 - вид слева весов вилочного погрузчика с Фиг.1;
Фиг.9 - вид справа весов вилочного погрузчика с Фиг.1;
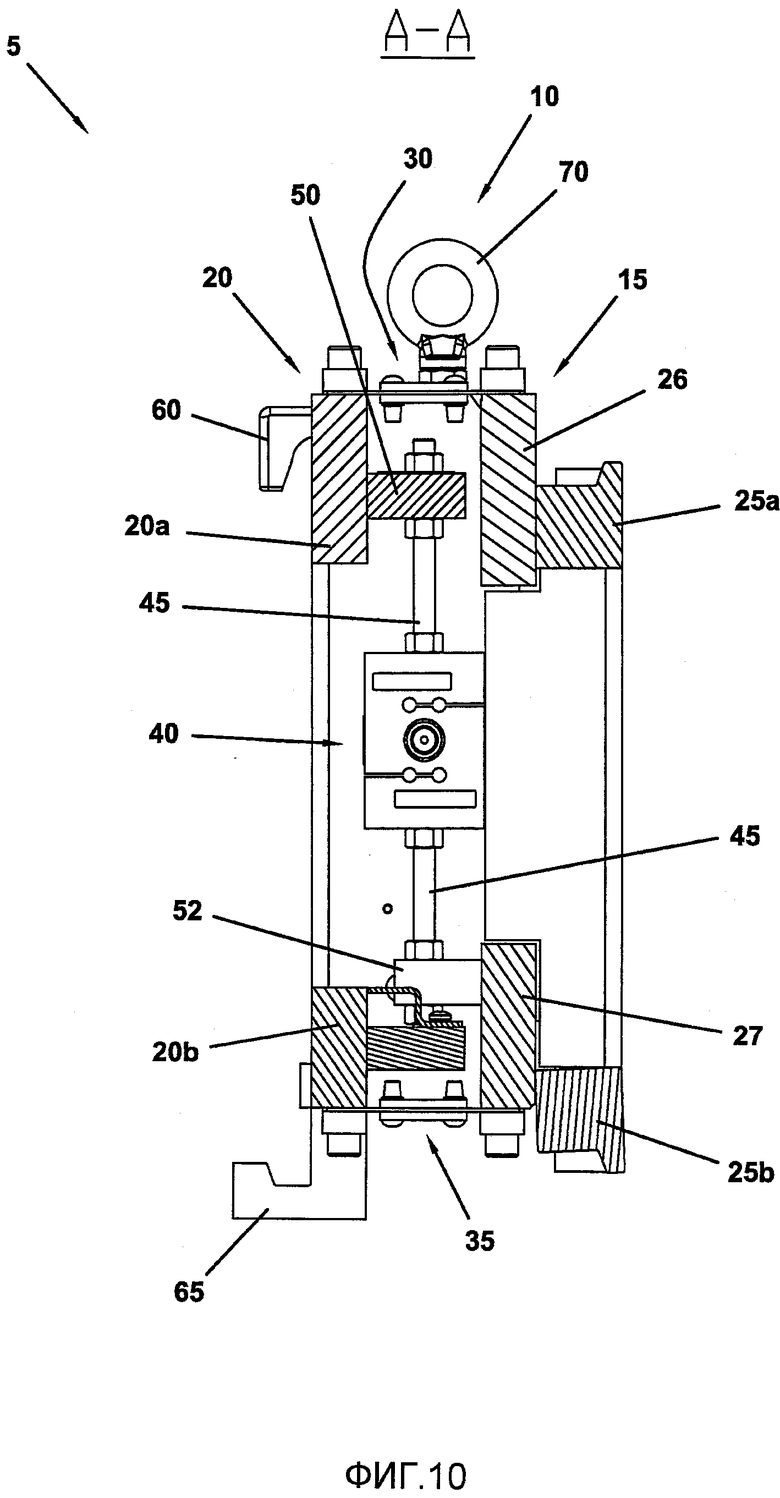
Фиг.10 - сечение весов вилочного погрузчика с Фиг.1, взятое по линии A-A с Фиг.5;
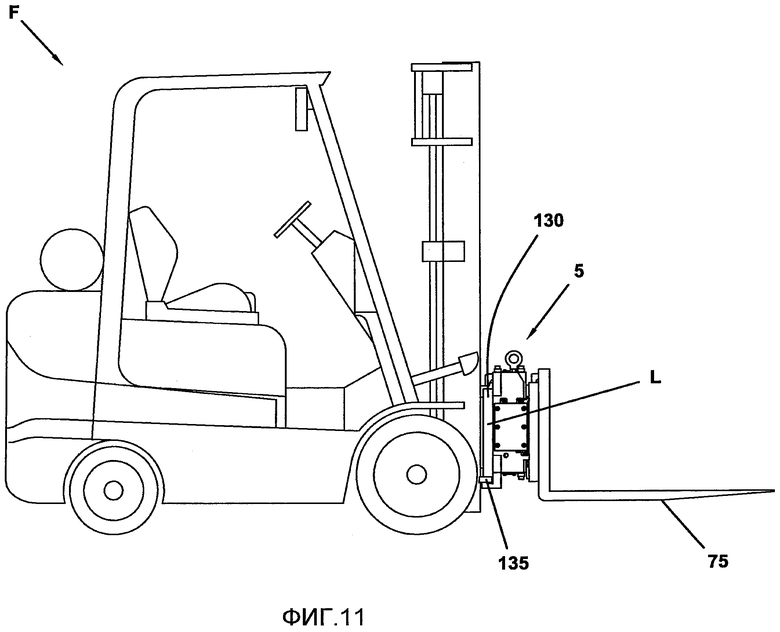
Фиг.11 - весы вилочного погрузчика с Фиг.1, смонтированные к вилочному погрузчику, причем подъемные вилы присоединены к весам вилочного погрузчика;
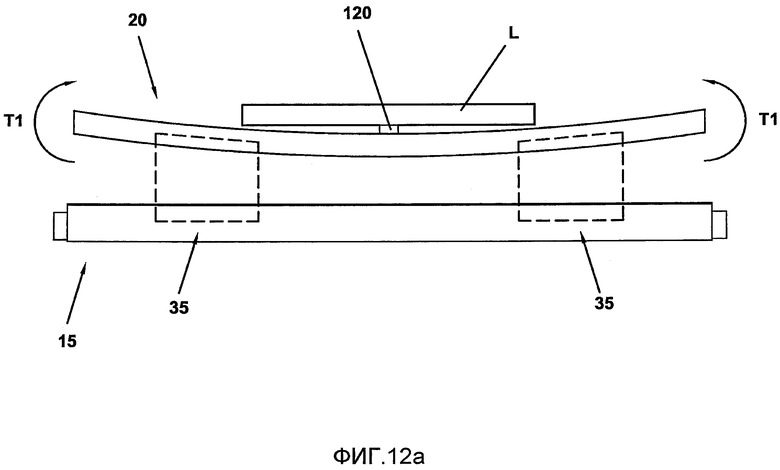
Фиг.12a - схематичный вид сверху, изображающий вызванное изгибание, по меньшей мере, нижнего участка задней рамы нагруженных весов вилочного погрузчика согласно настоящему изобретению, когда снабжены цельным нижним изгибаемым узлом;
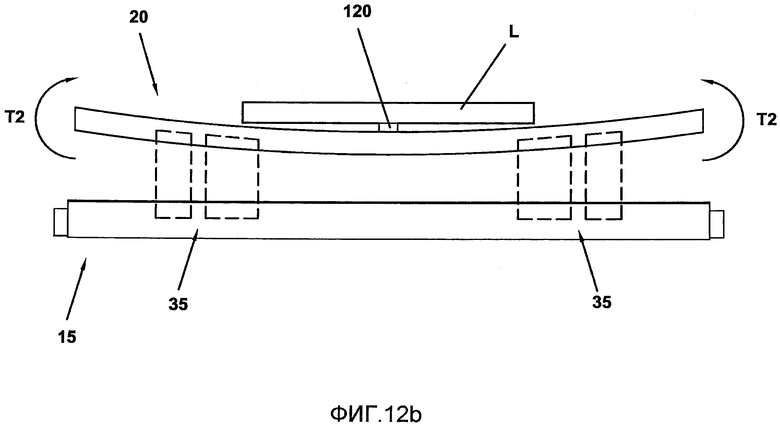
Фиг.12b - схематичный вид сверху, изображающий вызванное изгибание, по меньшей мере, нижнего участка задней рамы нагруженных весов вилочного погрузчика согласно настоящему изобретению, когда снабжены разделенным нижним изгибаемым узлом;
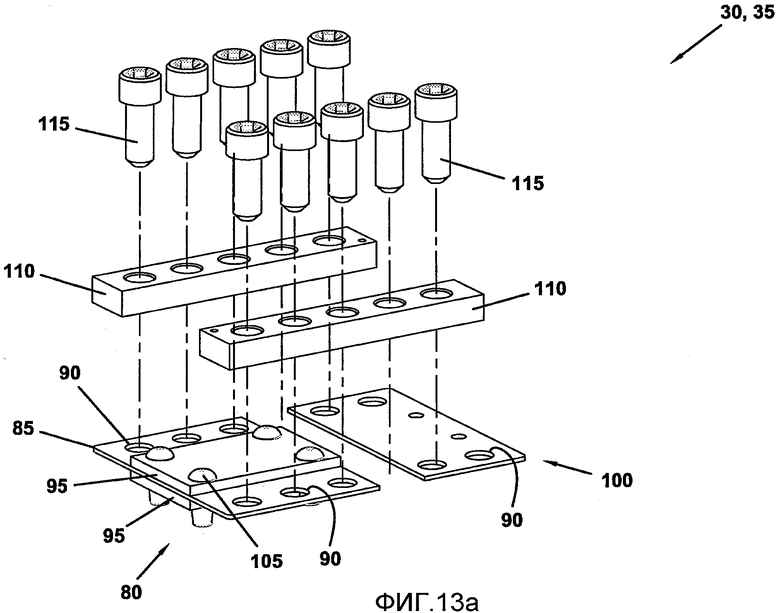
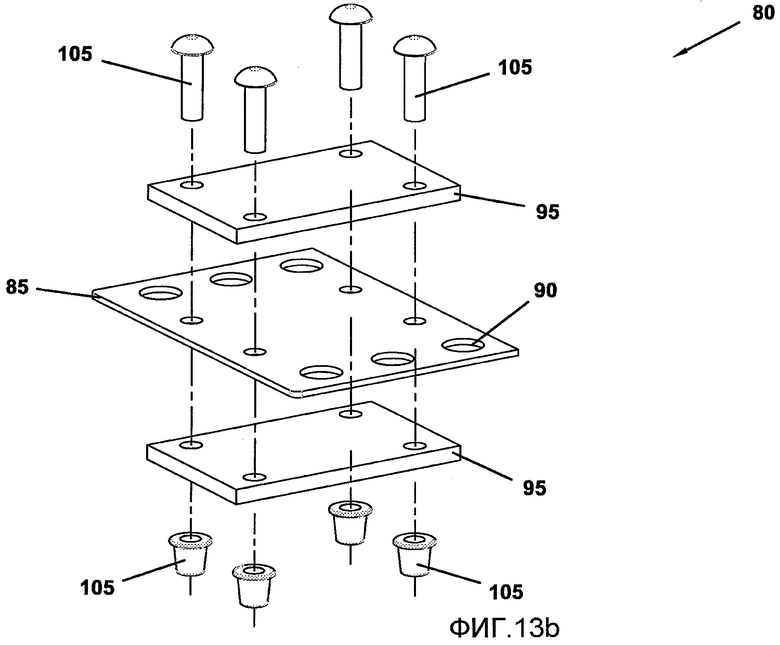
Фиг.13a - вид в перспективе в увеличенном масштабе одного варианта выполнения собранного, состоящего из двух частей (разделенного) изгибаемого узла, который может использоваться на весах вилочного погрузчика согласно настоящему изобретению; и
Фиг.13b вид с разнесением деталей одного участка разделенного изгибаемого узла с Фиг.13a.
Подробное описание вариантов выполнения изобретения
Один пример варианта выполнения весов 5 вилочного погрузчика согласно настоящему изобретению показан на Фиг.1-10. Весы 5 вилочного погрузчика включают в себя узел 10 рамы, содержащий переднюю раму 15 и заднюю раму 20. Задняя рама 20 смонтирована к подъемной каретке (которая также обычно может называться в уровне техники грузовой кареткой, вилочным держателем и так далее) вилочного погрузчика. Передняя рама 15 связана с задней рамой 20, но выполнена с возможностью смещения в вертикальном направлении относительно задней рамы на некоторое ограниченное расстояние.
Задняя рама 20 включает в себя пару по существу параллельных и отстоящих друг от друга верхних и нижних горизонтальных элементов 20a, 20b рамы, которые соединены парой по существу параллельных и отстоящих друг от друга вертикальных элементов 20c, 20d рамы. Соединение элементов 20a, 20b, 20c, 20d рамы предпочтительно осуществляется посредством сварки или какой-нибудь дугой технологии, которая обеспечивает приемлемо прочную и жесткую заднюю раму 20.
Передняя рама 15 также включает в себя пару по существу параллельных и отстоящих друг от друга верхних и нижних горизонтальных элементов 15a, 15b рамы, которые соединены парами по существу параллельных и отстоящих друг от друга вертикальных элементов 15c-15d, 15e-15f рамы. Пара вертикальных торцовых элементов 15g, 15h, также присоединены между горизонтальными элементами 15a, 15b рамы. Соединение вертикальных элементов рамы и торцовых элементов 15c-15h к горизонтальным элементам 15a, 15b рамы предпочтительно выполняются посредством сварки или какой-либо дугой технологии, которая имеет результатом приемлемо прочную и жесткую переднюю раму 15.
Передняя рама также может включать в себя пару обшивочных листов P. Когда присутствуют, обшивочные листы P могут дополнительно придавать передней раме 15 жесткость, защищать датчики 40 нагрузки и/или придавать более законченный внешний вид весам 5 вилочного погрузчика. В этом конкретном варианте выполнения, обшивочные плиты P расположены сбоку от центрального смотрового окна W (как описано более подробно ниже). Как показано здесь, обшивочные листы опираются на и могут быть присоединены к различным элементам передней рамы.
В этом варианте выполнения, верхняя изгибаемая поперечина 26 проходит вверх от передней рамы 15. Как показано, верхняя изгибаемая поперечина 26 приварена к верхней выемке в вертикальных элементах 15c-15d, 15e-15f рамы и к задней части верхнего приемника 25a вил. Как также показано, нижняя изгибаемая поперечина 27 приварена к нижней выемке вертикальных элементов 15c-15d, 15e-15f рамы и к задней части нижнего приемника 25b вил. Очевидно, другие расположения и точки и способы присоединения также возможны.
Горизонтальные элементы 15a, 15b рамы связаны с верхним и нижним приемником 25a, 25b вил, которые взаимодействуют для принятия и удерживания пары вил способом, который понятен специалистам в данной области техники. Например, в конкретном показанном варианте выполнения, нижний приемник 25b вил включает в себя выемку N, которая облегчает установку вил. Верхний приемник 25a вил может быть выполнен обычной показанной конструкцией, имеющей выемки. Приемники 25a, 25b вил могут быть выполнены заодно с горизонтальными элементами 15a, 15b рамы или могут быть отдельными элементами, которые приварены или иным образом прикреплены к ним.
Передняя рама 15 и задняя рама 20 соединены верхними и нижним изгибаемыми узлами 30, 35 (или изгибаемыми элементами), конструкция и назначение которых описано подробнее ниже. Верхние изгибаемые узлы 30 прикреплены к и соединяют верхнюю поверхность верхнего горизонтального элемента 20a задней рамы 20 с верхней изгибаемой поперечиной 26 передней рамы 15. Нижние изгибаемые узлы 35 прикреплены к и соединяют нижнюю поверхность нижнего горизонтального элемента 20b задней рамы с нижней изгибаемой поперечиной 27 передней рамы. Изгибаемые узлы 30, 35 поддерживают по существо параллельное расположение передней рамы 15 и задней рамы 20.
Пара вертикально ориентированных датчиков 40 нагрузки расположены между передней рамой 15 и задней рамой 20, так что передняя рама поддерживается ими. Различные датчики нагрузки могут быть подходящими для использования весов вилочного погрузчика согласно настоящему изобретению, и это понятно специалистам в данной области техники. Однако, как показано, эти конкретные весы 5 вилочного погрузчика используют S-образный датчик нагрузки, который подходит для измерения как растягивающих, так и сжимающих усилий. Предпочтительно, датчики 40 нагрузки расположены сбоку наружу от и по существу равноудалены от вертикальной центральной линии узла 10 рамы. Также датчики нагрузки предпочтительно расположены на достаточном расстоянии от вертикальной центральной линии узла 10 рамы, чтобы не загораживать центральное смотровое окно W. Центральное смотровое окно W обеспечивает оператору вилочного погрузчика улучшенную обзорность, когда подъемная каретка вилочного погрузчика находится в поднятом положении, и также, в то время как подъемная каретка находится в опущенном положении, например, при зацеплении груза.
Как лучше всего видно на Фиг.2 и 10, противоположные концы каждого датчика 40 нагрузки соединены шпильками 45 крепления между передней рамой 15 и задней рамой 20. В конкретном варианте выполнении, верхняя шпилька 45 крепления соединяет один конец ее соответствующего датчика 40 нагрузки с крепежным элементом 50, связанным с задней рамой 20. Аналогично, нижняя шпилька 45 крепления соединяет противоположный конец ее соответствующего датчика 40 нагрузки с крепежным элементом 52, связанным с нижней изгибаемой поперечиной 27 передней рамы 15. При таком расположении, вертикальное перемещение передней рамы 15 относительно задней рамы 20 регистрируется датчиками 40 нагрузки.
Весы 5 вилочного погрузчика предпочтительно, но не обязательно, включают в себя жесткий ограничитель (ограничители) 125 хода или другой элемент (элементы) для ограничения вертикального смещения передней рамы 15 до некоторой заданной и приемлемой величины. Например, если вилочный погрузчик, использующий весы настоящего изобретения, используется для поднятия груза, который тяжелее предела весов, жесткие ограничитель (ограничители) 125 хода может предотвратить повреждение весов, которое в противном случае имеет место в результате чрезмерного смещения передней рамы 15. Такой жесткий ограничитель (ограничители) 125 хода также может включать в себя упругий участок буфера.
Различные электронные устройства, связанные с датчиками 40 нагрузки, предпочтительно размещены внутри корпуса E, который может быть установлен в одном или более местах передней или задней рамы 15, 20. Корпус E, или подобная оболочка, также может вмещать электронные устройства, которые могут облегчить беспроводную передачу сигналов от датчиков 40 нагрузки к одному или более приемнику. Такие приемники могут быть установлены на вилочном погрузчике и также могут быть расположены дистанционно от них. Инклинометр (не показан) также может быть обеспечен для измерения наклона подъемной каретки, для того чтобы соответствующим образом корректировать показания веса весов вилочного погрузчика. При необходимости, инклинометр может располагаться внутри корпуса E, хотя он также может располагаться снаружи от него (например, на передней или задней раме).
Установка весов вилочного погрузчика согласно настоящему изобретению на вилочный погрузчик может быть выполнено различными способами. Однако, этот конкретный вариант выполнения весов 5 вилочного погрузчика использует пару крюков 60 крепления, которые хорошо известным специалистам в данной области техники. Как понятно специалистам в данной области техники, и как видно на Фиг.11, эти крюки 60 крепления будут перекрывать и зацеплять верхний вилочный держатель 130 обычно подъемной каретки L, когда весы 5 вилочного погрузчика прикреплены к вилочному погрузчику F. В частности, элементы крюка крепления служат для подвешивания весов 5 вилочного погрузчика к верхнему вилочному держателю 130 подъемной каретки L.
Весы 5 вилочного погрузчика также могут включать в себя пару защитных ограничителей 65, которые используются для предотвращения подъема весов вилочного погрузчика с подъемной каретки вилочного погрузчика, и для предотвращения или ограничения любого отделения, по меньшей мере, между нижним участком весов вилочного погрузчика и нижним вилочным держателем 135 подъемной каретки. В этом варианте выполнения, защитные ограничители 65 могут быть прикреплены к нижнему горизонтальному элементу 20b задней рамы 20 после того, как весы 5 вилочного погрузчика будут подвешены к подъемной каретке L крюками 60 крепления. Как видно на Фиг.11, защитные ограничители 65 обычно не зацепляют нижний вилочный крепежный элемент 135 подъемной каретки L, когда весы 5 вилочного погрузчика подвешены к подъемной каретке.
Боковое перемещение весов вилочного погрузчика согласно настоящему изобретению относительно подъемной каретки может быть ограничено множеством способов, как понятно специалистам в данной области техники. В конкретном показанном варианте выполнения, боковое ограничение выполнено посредством ограничительного элемента 137, который прикреплен к или образован на задней поверхности верхнего горизонтального элемента 20a задней рамы 20. Ограничительный элемент 137 зацепляет выемку, имеющуюся в верхнем вилочном держателе 130 подъемной каретки L.
В альтернативном варианте выполнения настоящего изобретения, весы вилочного погрузчика могут использовать конструкцию крепления вил, такую, которая обычно присутствует на вилочном погрузчике. Более конкретно, весы 5 вилочного погрузчика могут включать в себя пару верхних фиксирующих устройств 62 (см. альтернативное фиксирующее устройство, показанное на Фиг.1b), которые понятны специалистам в данной области техники. Эти фиксирующие устройства 62 включают в себя подпружиненные штифты или другие элементы, которые зацепляются с размещающими выемками на верхнем вилочном крепежном элементе обычной подъемной каретки вилочного погрузчика. Эти выемки могут быть такими же, как или аналогичными, например, выемкам, присутствующим на верхнем приемнике 25a вил передней рамы 15. Как с описанным выше вариантом выполнения, такой вариант выполнения весов вилочного погрузчика также может включать в себя пару защитных ограничителей, которые используются для предотвращения случайного смещения весов вилочного погрузчика с подъемной каретки вилочного погрузчика. Фиксирующие устройства могут дополнительно препятствовать боковому перемещению таких весов вилочного погрузчика на подъемной каретке вилочного погрузчика.
Один или более подъемных элемента могут присутствовать на узле 10 рамы, чтобы способствовать креплению весов 5 вилочного погрузчика к вилочному погрузчику. В этом варианте выполнения, для этой цели, болт 70 с проушиной прикреплен к верхней части каждого вертикального элемента 20c, 20d задней рамы 20. Другие различные подъемные элементы могут быть использованы вместо болта с проушиной в других вариантах выполнения настоящего изобретения.
Как только весы 5 вилочного погрузчика прикреплены к подъемной каретке L вилочного погрузчика F, как описано выше и показано на Фиг.11, подъемные вилы 75 могут быть прикреплены к передней раме 15. Как описано ранее, передняя рама 15 этого варианта выполнения весов 5 вилочного погрузчика включает в себя верхний и нижний вилочные держатели 25a, 25b по существу такого же типа, используемого на большинстве каретках вилочного подъемника. Сами по себе, вилы 75 установлены в весы 5 вилочного погрузчика, используя выемку N в нижнем вилочном держателе 25b, чтобы позволить верхнему крепежному участку вилы освободить верхний вилочный держатель 25a. Вилы 75 по существу могут быть перемещены наружу и зафиксированы на верхнем вилочном держателе 25a, используя фиксирующее устройство, обычно присутствующее на каждой виле (такое, как фиксирующее устройство 62, описанное выше).
Как упомянуто выше, весы вилочного погрузчика настоящего изобретения используют конструкцию с подвешиванием в трех точках. Как наиболее ясно понятно со ссылкой на Фиг.1b и 11, как только установлена на вилочный погрузчик F, задняя рама 20 весов 5 вилочного погрузчика будет касаться и взаимодействовать с подъемной кареткой L вилочного погрузчика только в трех местах: в месте двух верхних крепежных элементов 60, связанных с верхним элементом 20a рамы и в месте отклонителя 120, который проходит вниз на некотором расстоянии по существу от центральной линии нижнего элемента 20b рамы.
С установленными весами 5 вилочного погрузчика на подъемную каретку L вилочного погрузчика F, и установленными подъемными вилами 75 на передней раме 15 весов вилочного погрузчика, вилочный погрузчик может использоваться для подъема и перемещения грузов обычным образом. Как понятно из предшествующего описания и сопровождающих чертежей, когда груз помещается на подъемные вилы 75, изгибаемые узлы 30, 35 весов 5 вилочного погрузчика обеспечивают смещение вниз передней рамы 15 относительно задней рамы 20. Усилия, связанные со смещением, переносятся на датчики 40 нагрузки и, как четко понятно специалистам в данной области техники, создают выходной сигнал, который является показателем веса груза на подъемных вилах 75. Во время смещения вниз передней рамы 15, изгибаемые узлы 30, 35 также в целом сохраняют по существу параллельное расположение между передней рамой и задней рамой 20.
Также можно учесть, что особенно вследствие длины обычных подъемных вил, различные расположения груза на них могут создавать усилия различной величины, которые воплощаются в качестве растягивающих усилий возле верхней части узла 10 рамы и сжимающих усилий возле нижней части узла рамы, поскольку передается от верхней рамы 15 нижней раме 20 через верхний и нижний изгибаемые узлы 30, 35. Эти усилия будут менее сильными, когда груз расположен на подъемных вилах ближе к весам вилочного погрузчика, и более сильными, когда груз расположен дальше от весов вилочного погрузчика.
Значительные растягивающие и сжимающие усилия могут создаваться, при подъеме тяжелых грузов. Для того чтобы предотвратить деформацию этими усилиями узла 10 рамы (например, изменением параллельного расположения между передней рамой 15 и задней рамой 20), собранный узел рамы должен быть достаточно жестким. Без такой жесткости, деформация узла рамы может привести к ошибочным показаниям веса, например, влиянием на показания датчиков 40 нагрузки.
Наряду с тем, что узел рамы весов вилочного погрузчика настоящего изобретения должен быть жестким, он одновременно должен обеспечивать некоторое вертикальное смещение передней рамы 15 при нагрузке. Использование изгибаемых узлов, таких как примеры изгибаемых узлов 30, 35, обеспечивает достаточно жесткую конструкцию узла 10 рамы, которые по-прежнему позволяют требуемое вертикально смещение между рамами 15, 20. Изгибаемые узлы 30, 35 помогают сохранять по существу параллельное расположение между рамами, и также служат для передачи усилий от передней рамы к задней раме (которая неподвижно прикреплена к подъемной каретке вилочного погрузчика). Как здесь показано, изгибаемые узлы 30, 35 предпочтительно, но не обязательно, расположены на весах 5 вилочного погрузчика таким образом и/или в таком положении, которые позволяют легкий доступ к датчикам 40 нагрузки.
Кроме того, как показано на Фиг.12a-12b, когда груз присутствует на подъемных вилах, связанных с установленными весами вилочного погрузчика настоящего изобретения, возникающие в результате этого усилия, передаваемые весам вилочного погрузчика, в целом вызывают изгибание, по меньшей мере, нижнего участка их задней рамы 20, вокруг точки контакта между отклонителем 120 весов вилочного погрузчика и подъемной кареткой L вилочного погрузчика. Поскольку один или более изгибаемых узлов 35 жестко присоединены между задней рамой и передней рамой весов вилочного погрузчика, это изгибающее усилие, приложенное к задней раме, стремиться передать одинаковый момент (то есть, скручивающее усилие, находящееся в одной плоскости), по меньшей мере, каждому нижнему изгибаемому узлу.
Эти скручивающие усилия, находящиеся в одной плоскости, представлены на Фиг.12a-12b в виде стрелок T1 и T2, соответственно. Фиг.12a представляет весы вилочного погрузчика согласно настоящему изобретению, имеющие цельные нижние изгибаемые узлы. Фиг.12b представляет весы вилочного погрузчика согласно настоящему изобретению, имеющие разделенные нижние изгибаемые узлы. Как понятно специалистам в данной области техники, сопротивление кручению разделенного изгибаемого узла с Фиг.12b меньше, чем сопротивление кручению цельного изгибаемого узла с Фиг.12a. Как таковое, скручивающее усилие T1, связанное с весами вилочного погрузчика с Фиг.12a, больше, чем скручивающее усилие T2, связанное с весами вилочного погрузчика с Фиг.12b (то есть T1>T2).
Использование изгибаемого узла, который проявляет низкое сопротивление кручению, желательно, сам по себе изгибаемый узел позволяет вертикальное смещение передней рамы весов вилочного погрузчика, которое в целом не поддается воздействию скручивающих усилий, испытываемых изгибаемыми узлами. То есть, использование (по меньшей мере, нижних) изгибаемых узлов с низким сопротивлением кручению по существу предотвращает любое изгибающий момент, вызываемый в задней раме от влияния вертикального смещения изгибаемых узлов. Само по себе, вертикальное смещение передней рамы и показания, вырабатываемые датчиками нагрузки, также не поддаются воздействию.
Прочность на растяжение, и прочность на изгиб, на продольный изгиб и сопротивление кручению изгибаемых узлов 30, 35 предпочтительно может регулироваться. Величина прочности на растяжение, прочности на изгиб, прочности на продольный изгиб и/или сопротивления кручению изгибаемого элемента настоящего изобретения, может быть рассчитана или экспериментально определена, и оба способа понятны специалистам в данной области техники.
Как лучше всего видно на Фиг.13a-13b, этот конкретный вариант выполнения изгибаемого узла 30 разделенной конструкции, то есть изгибаемый узел фактически включает в себя два отдельных изгибаемых элемента: главный изгибаемый элемент 80 и вспомогательный изгибаемый элемент 100. В этом варианте выполнения, главный изгибаемый элемент 80 и вспомогательный изгибаемый элемент 100 выполнены различного размера и прочности, хотя не обязательно должно быть так.
Главный изгибаемый элемент 80 использует основную изгибаемую пластину 85, имеющую три крепежных отверстия 90 для ее прикрепления к верхней изгибаемой поперечине 26 узла 15 передней рамы и верхней поверхности верхнего горизонтального элемента 20a задней рамы 20 посредством прижимных планок 110 изгибаемого элемента и соответствующих резьбовых крепежных деталей 115. Вспомогательные пластины 95 жесткости прикреплены как к верхней, так и нижней поверхности основной изгибаемой пластины 85, в данном случае множеством заклепок 105. Вспомогательные пластины 95 жесткости служат для увеличения, по меньшей мере, прочности на изгиб и продольный изгиб главного изгибаемого элемента 80. Также могут использоваться и другие технологии создания главного изгибаемого элемента, например, изменение толщины основной изгибаемой пластины 85 и/или вспомогательной пластины (пластин) 95 жесткости, использование различного количества вспомогательных пластин жесткости, использование материалов другого модуля, использование основных или вспомогательных пластин жесткости различных форм и т.д. Таким образом, прочность на растяжение, прочность на изгиб, прочность на продольный изгиб и/или сопротивление кручению главного изгибаемого элемента 80 может регулироваться по необходимости.
Конкретный показанный вспомогательный изгибаемый элемент 100 является меньше и менее жестким, чем главный изгибаемый элемент 80. В этом варианте выполнения, вспомогательный изгибаемый элемент 100 создан путем разделения основной изгибаемой пластины 85, которая использована в главном изгибаемом элементе 80 и устранения вспомогательных пластин 95 жесткости. Как и с главным изгибаемым элементом, аналогичные альтернативные технологии создания вспомогательного изгибаемого элемента также могут быть использованы. Как и с главным изгибаемым элементом 80, такие альтернативные технологии создания позволяют регулировать такие механические характеристики вспомогательного изгибаемого элемента 100 по необходимости.
Хотя это и не является существенным для настоящего изобретения, использование отдельных изгибаемых элементов разделенной конструкции или иначе неодинаковой прочности на растяжение, прочности на изгиб, прочности на продольный изгиб и/или сопротивления кручению, позволяет регулировать такие общие механические характеристики получаемого изгибаемого узла в большей степени, чем было бы возможно при единственном изгибаемом элементе. Более конкретно, изгибаемые узлы могут быть созданы для обеспечения достаточного сопротивления сжимающим (изгибающим) или скручивающим усилиям, с которыми вероятно придется столкнуться при использовании конкретных весов вилочного погрузчика, наряду с тем, проявляя очень низкое сопротивление кручению, находящемуся в плоскости.
Использование конструкции с подвешиванием в трех точках устраняет сложные и/или трудоемкие операции настройки, которые должны быть выполнены, чтобы уравновесить реакционные нагрузки, после установки и до использования весов вилочного погрузчика, использующих конструкцию с подвешиванием в четырех точках. Более конкретно, при конструкции весов с двумя датчиками нагрузки и четырьмя точками подвешивания, должно быть обеспечено, что равная нагрузка прикладывается к каждой точке контакта. Равная нагрузка в целом достигается манипулированием регулировочным механизмом, связанным с каждой точкой контакта и, поскольку манипулирование регулировочным механизмом в одной точке контакта может повлиять на нагрузку в другой точке контакта, этот процесс может быть трудоемким. Кроме того, любое отклонение от настроенного расположения во время использования весов, например, из-за незатянутого регулировочного механизма или изменения положения вследствие воздействия, и так далее, может привести к неточным показаниям веса. Однако, вследствие единственной нижней точки приложения реакции весов вилочного погрузчика нет необходимости выполнять такую операцию настройки и, следовательно, также не имеет значения то, что изначально установленное положение весов вилочного погрузчика изменится во время использования.
Наряду с тем, что пример варианта выполнения весов вилочного погрузчика был показан и описан здесь в попытке лучше пояснить основную идею настоящего изобретения, очевидно, что могут быть возможны отклонения таких весов вилочного погрузчика, без отклонения от объема настоящего изобретения. Например, могут быть использованы различные конструкции рамы, так что отдельные ее элементы отличны по размеру, форме, положению, ориентации и количеству от тех, которые показаны и описаны здесь. Соединение таких элементов рамы также может происходить другими способами. Установка весов вилочного погрузчика на вилочный погрузчик, и/или присоединение вил к весам вилочного погрузчика, также может быть выполнено способом, отличным от способа показанного здесь. Могут быть также использованы другие образцы и конструкции изгибаемого элемента. Например, изгибаемые элементы, состоящие из различных материалов, и/или изгибаемые элементы различной толщины могут использоваться совместно с или вместо показанных изгибаемых элементов. Кроме того, специалистам в данной области техники понятны или могут стать понятны и другие изменения. Следовательно, хотя выше подробно описаны некоторые варианты выполнения настоящего изобретения, объем изобретения не следует считать ограниченным этим описанием, так что возможны изменения без отклонения от объема изобретения, определяемого только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Усовершенствованный вилочный держатель | 2021 |
|
RU2807798C2 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ВИЛОЧНОГО ПОГРУЗЧИКА | 2010 |
|
RU2547024C2 |
| ГРУЗОВАЯ КАРЕТКА ГРУЗОПОДЪЕМНИКА ПОГРУЗЧИКА | 2024 |
|
RU2828413C1 |
| Грузоподъемник вилочного погрузчика | 1990 |
|
SU1730024A1 |
| ПОДЪЕМНИК ТЕЛЕСКОПИЧЕСКИЙ | 2022 |
|
RU2785824C1 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| Вилочный погрузчик | 1986 |
|
SU1370062A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ (ВАРИАНТЫ) | 2006 |
|
RU2466081C2 |
| Навесное устройство к погрузчику для перегрузки грузов в кипах | 1990 |
|
SU1791371A1 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ ИНСТРУМЕНТА САМОХОДНОЙ РАБОЧЕЙ МАШИНЫ И ПРИСПОСОБЛЕНИЕ С ИНСТРУМЕНТОМ ДЛЯ САМОХОДНОЙ РАБОЧЕЙ МАШИНЫ | 2020 |
|
RU2787523C2 |




Весы вилочного погрузчика содержат заднюю раму, выполненную с возможностью прикрепления к подъемной каретке вилочного погрузчика, переднюю раму, связанную с задней рамой, выполненную с возможностью смещения в вертикальном направлении относительно задней рамы, пару датчиков нагрузки, расположенных между задней рамой и передней рамой. Задняя рама выполнена с возможностью контактирования с подъемной кареткой только в трех точках. Обеспечивается возможность быстрого и легкого присоединения/отсоединения к/от вилочного погрузчика весов без необходимости в подготовительных операциях настройки. Вследствие единственной нижней точки приложения реакции весов вилочного погрузчика не имеет значения то, что изначально установленное положение весов вилочного погрузчика изменится во время использования в результате незатянутого регулировочного механизма, изменения положения вследствие воздействия, и так далее. Весы вилочного погрузчика предназначены для точного определения веса груза, помещенного на вилы или другие подъемные элементы вилочного погрузчика, независимо от положения груза на них. В одном из вариантов выполнения весы вилочного погрузчика включают в себя центральное смотровое окно, которое позволяет оператору смотреть через весы вилочного погрузчика, при управлении соответствующим вилочным погрузчиком. Изобретение обеспечивают повышение удобства при использовании. 4 н. и 26 з.п. ф-лы, 18 ил.
1. Весы вилочного погрузчика, содержащие:
заднюю раму, выполненную с возможностью прикрепления к подъемной каретке вилочного погрузчика;
переднюю раму, связанную с задней рамой, выполненную с возможностью смещения в вертикальном направлении относительно задней рамы и выполненную с возможностью принятия и удерживания, по меньшей мере, одной подъемной вилы;
пару датчиков нагрузки, расположенных между задней рамой и передней рамой, причем первый конец каждого датчика нагрузки присоединен к задней раме, а второй конец каждого датчика нагрузки присоединен к передней раме;
по меньшей мере, один верхний изгибаемый узел, соединяющий верхний участок передней рамы с верхним участком задней рамы; и
по меньшей мере, один нижний изгибаемый узел, соединяющий нижний участок передней рамы с нижним участком задней рамы;
при этом задняя рама выполнена с возможностью контактирования с подъемной кареткой только в трех точках.
2. Весы по п.1, в которых передняя рама и задняя рама сконструированы так, чтобы создать расположенное по центру смотровое окно через упомянутые весы.
3. Весы по п.1, в которых первый конец датчика нагрузки является верхним концом датчика нагрузки, а второй конец датчика нагрузки является нижним концом датчика нагрузки.
4. Весы по п.1, в которых датчики нагрузки присоединены к передней и задней рамам посредством удлиненных шпилек крепления.
5. Весы по п.1, в которых передняя рама включает в себя удлиненный и по существу горизонтально расположенный вилочный держатель с выемками, для принятия и удерживания, по меньшей мере, одной подъемной вилы.
6. Весы по п.1, дополнительно содержащие пару крюков крепления, расположенных на задней поверхности задней рамы, причем крюки крепления предназначены для зацепления верхнего вилочного держателя к подъемной каретке и подвешивания к ней задней рамы и содержат, по меньшей мере, две из упомянутых трех точек контакта между задней рамой и подъемной кареткой.
7. Весы по п.1, дополнительно содержащие отклонитель, проходящий назад от нижнего участка задней рамы и содержащий третью из упомянутых трех точек контакта между задней рамой и подъемной кареткой.
8. Весы по п.1, дополнительно содержащие, по меньшей мере, один жесткий ограничитель хода для ограничения вертикального смещения передней рамы.
9. Весы по п.1, дополнительно содержащие, по меньшей мере, один защитный ограничитель для предотвращения удаления весов вилочного погрузчика с подъемной каретки и для препятствования отделению нижнего участка задней рамы от подъемной каретки.
10. Весы по п.1, дополнительно содержащие телеметрическое устройство для беспроводной передачи цифровых сигналов от датчиков нагрузки на удаленный приемник.
11. Весы по п.1, в которых, по меньшей мере, один нижний изгибаемый узел имеет разделенную конструкцию.
12. Весы по п.1, дополнительно содержащие ограничительный элемент, связанный с верхним элементом задней рамы и выполненный с возможностью зацепления выемки в верхнем вилочном держателе подъемной каретки и тем самым ограничения бокового перемещения весов вилочного погрузчика.
13. Весы по п.1, дополнительно содержащие пару ограничительных элементов, связанных с верхним элементом задней рамы, причем каждый ограничительный элемент включает в себя фиксатор, имеющий подпружиненный штифт, выполненный с возможностью зацепления выемки в верхнем вилочном держателе подъемной каретки, когда фиксатор приведен в действие, и тем самым ограничения бокового перемещения весов вилочного погрузчика.
14. Весы вилочного погрузчика, содержащие:
узел рамы, дополнительно содержащий:
заднюю раму, выполненную с возможностью прикрепления к подъемной каретке;
переднюю раму, связанную с задней рамой и по существу параллельную ей, причем передняя рама выполнена с возможностью смещения в вертикальном направлении относительно задней рамы и выполнена с возможностью принятия и удерживания, по меньшей мере, одной подъемной вилы;
по меньшей мере, один верхний изгибаемый узел, соединяющий верхний участок передней рамы с верхним участком задней рамы; и
по меньшей мере, один нижний изгибаемый узел, соединяющий нижний участок передней рамы с нижним участком задней рамы;
пару датчиков нагрузки, расположенных между задней рамой и передней рамой, причем первый конец каждого датчика нагрузки присоединен к задней раме, а второй конец каждого датчика нагрузки присоединен к передней раме;
при этом задняя рама выполнена с возможностью контактирования с подъемной кареткой только в трех точках.
15. Весы по п.14, в которых узел рамы сконструирован так, чтобы обеспечить расположенное по центру смотровое окно через узел рамы.
16. Весы по п.14, в которых первый конец датчика нагрузки является верхним концом датчика нагрузки, а второй конец датчика нагрузки является нижним концом датчика нагрузки.
17. Весы по п.14, в которых передняя рама включает в себя удлиненный и по существу горизонтально расположенный вилочный держатель с выемками для принятия и удерживания, по меньшей мере, одной подъемной вилы.
18. Весы по п.14, дополнительно содержащие пару крюков крепления, расположенных на задней поверхности задней рамы, причем крюки крепления предназначены для зацепления верхнего вилочного держателя с подъемной кареткой и подвешивания к ней задней рамы и содержат, по меньшей мере, две из упомянутых трех точек контакта между задней рамой и подъемной кареткой.
19. Весы по п.14, дополнительно содержащие отклонитель, проходящий назад от нижнего участка задней рамы и содержащий третью из упомянутых трех точек контакта между задней рамой и подъемной кареткой.
20. Весы по п.14, дополнительно содержащие, по меньшей мере, один жесткий ограничитель хода для ограничения вертикального смещения передней рамы.
21. Весы по п.14, дополнительно содержащие, по меньшей мере, один защитный ограничитель для предотвращения удаления весов вилочного погрузчика с подъемной каретки и для препятствования отделению нижнего участка задней рамы от подъемной каретки.
22. Весы по п.14, дополнительно содержащие телеметрическое устройство для беспроводной передачи цифровых сигналов от датчиков нагрузки на удаленный приемник.
23. Весы по п.14, в которых, по меньшей мере, один нижний изгибаемый узел имеет разделенную конструкцию.
24. Весы по п.14, дополнительно содержащие ограничительный элемент, связанный с верхним элементом задней рамы и выполненный с возможностью зацепления выемки в верхнем вилочном держателе подъемной каретки и тем самым ограничения бокового перемещения весов вилочного погрузчика.
25. Весы вилочного погрузчика с подвешиванием в трех точках, содержащие:
заднюю раму;
переднюю раму, связанную с задней рамой и по существу параллельную ей, причем передняя рама выполнена с возможностью смещения в вертикальном направлении относительно задней рамы и выполнена с возможностью принятия и удерживания, по меньшей мере, одной подъемной вилы;
пару датчиков нагрузки, расположенных между задней рамой и передней рамой и соединяющих заднюю раму и переднюю раму, причем верхний конец каждого датчика нагрузки присоединен к задней раме, а нижний конец каждого датчика нагрузки присоединен к передней раме;
по меньшей мере, один верхний изгибаемый узел, соединяющий верхний изгибающий элемент передней рамы с верхним участком задней рамы; и, по меньшей мере, один нижний изгибаемый узел, соединяющий нижний изгибаемый элемент передней рамы с нижним участком задней рамы, причем, по меньшей мере, нижние изгибаемые узлы обеспечивают большее сопротивление деформации растяжения и сжатия, чем деформации кручения;
по меньшей мере, один жесткий ограничитель хода для ограничения вертикального смещения передней рамы;
пару крюков крепления, расположенных на задней поверхности задней рамы, причем крюки крепления предназначены для зацепления верхнего вилочного держателя с подъемной кареткой и подвешивания к ней задней рамы и содержат, по меньшей мере, две из упомянутых трех точек контакта между задней рамой и подъемной кареткой; и
отклонитель, проходящий назад от нижнего заднего участка задней рамы и содержащий третью из упомянутых трех точек контакта между задней рамой и подъемной кареткой.
26. Весы по п.25, в которых передняя рама и задняя рама сконструированы так, чтобы создать расположенное по центру смотровое окно через упомянутые весы.
27. Весы по п.25, дополнительно содержащие, по меньшей мере, один нижний защитный ограничитель для предотвращения удаления весов вилочного погрузчика с подъемной каретки и для препятствования отделению нижнего участка задней рамы от подъемной каретки.
28. Весы по п.25, дополнительно содержащие телеметрическое устройство для беспроводной передачи цифровых сигналов от датчиков нагрузки на удаленный приемник.
29. Весы вилочного погрузчика с подвешиванием в трех точках, содержащие:
узел рамы, дополнительно содержащий:
заднюю раму, имеющую, по меньшей мере, два отстоящих друг от друга и по существу параллельных верхний и нижний горизонтальные элементы рамы, соединенные, по меньшей мере, двумя отстоящими друг от друга и по существу параллельными вертикальными элементами рамы,
переднюю раму, имеющую, по меньшей мере, два отстоящих друг от друга и по существу параллельных верхний и нижний горизонтальные элементы рамы, соединенные, по меньшей мере, двумя отстоящими друг от друга и по существу параллельными вертикальными элементами рамы, причем передняя рама по существу параллельна задней раме и выполнена с возможностью смещения в вертикальном направлении относительно нее, при этом передняя рама выполнена с возможностью принятия и удерживания, по меньшей мере, одной подъемной вилы,
по меньшей мере, один жесткий ограничитель хода для ограничения вертикального смещения передней рамы,
по меньшей мере, один защитный ограничитель для предотвращения удаления весов вилочного погрузчика с подъемной каретки и для препятствования отделению нижнего участка задней рамы от подъемной каретки, и
расположенное по центру смотровое окно, проходящее через переднюю раму и заднюю раму,
пару датчиков нагрузки, расположенных между задней рамой и передней рамой и соединяющих заднюю раму и переднюю раму, причем верхний конец каждого датчика нагрузки присоединен к задней раме, а нижний конец каждого датчика нагрузки присоединен к передней раме;
пару отстоящих друг от друга верхних изгибаемых узлов, соединяющих верхний изгибаемый элемент передней рамы с верхним участком задней рамы, и пару отстоящих друг от друга нижних изгибаемых узлов, соединяющих нижний изгибаемый элемент передней рамы с нижним участком задней рамы, причем изгибаемые узлы обеспечивают, по меньшей мере, большее сопротивление деформации растяжения и сжатия, чем деформации кручения;
пару крюков крепления, расположенных на задней поверхности задней рамы, причем крюки крепления предназначены для зацепления верхнего вилочного держателя с подъемной кареткой и подвешивания к ней задней рамы и содержат, по меньшей мере, две из упомянутых трех точек контакта между задней рамой и подъемной кареткой; и
отклонитель, проходящий назад от нижнего участка задней рамы и содержащий третью из упомянутых трех точек контакта между задней рамой и подъемной кареткой.
30. Весы по п.29, дополнительно содержащие телеметрическое устройство для беспроводной передачи цифровых сигналов от датчиков нагрузки на удаленный приемник.
| US 7026557 B2, 11.04.2006 | |||
| US 4421186 A, 20.12.1983 | |||
| ЕР 1111353 A1, 27.06.2001 | |||
| Навесное устройство к погрузчику | 1985 |
|
SU1299962A1 |
| Способ очистки поваренной соли от солей магния и калия | 1926 |
|
SU11053A1 |
| 1972 |
|
SU412517A1 | |

