Изобретение относится к области судостроения, в частности к системам автоматического управления судами при их динамическом позиционировании в заданной точке мирового океана без постановки на якорь.
Известны способы управления движением судна (патенты России 2221726, 2151713, 2267440, 2297362), которые обеспечивают автоматическое управление движением судна по заданному направлению.
Известен способ автоматического управления движением судна (патент России 2292289), в котором используются приемник спутниковой навигационной системы, датчик ветроволновых возмущений, исполнительные механизмы в виде подруливающих устройств и выдвижных поворотных колонок, математическая модель судна и регулятор-сумматор, на вход которого подают сигналы текущего расхождения координат центра масс судна с координатами точки позиционирования от задатчика координат и данные ветроволновых возмущений, суммарные управляющие сигналы выходов регулятора-сумматора распределяют по исполнительным механизмам, минимизируя в режиме реального времени расхождение координат.
Недостатком указанных способов управления движением судна является отсутствие в системе управления судном элементов, определяющих начало шквалистого ветра, что не позволяет выработать прогноз на управление судном в резко изменяющихся гидрометеорологических условиях, что является существенным при решении задачи динамического позиционирования, поскольку движение судна при позиционировании совершается относительно неподвижного балансировочного режима с малыми значениями линейной скорости и определяющими являются силы и моменты ветроволновых возмущений, которые необходимо компенсировать при помощи исполнительных механизмов с минимумом энергетических затрат.
Технический результат заключается в упреждающем формировании управляющих сигналов исполнительным механизмам судна при его динамическом позиционировании в условиях возникновении шквала.
Технический результат достигается за счет того, что на основании получаемых от датчика ветроволновых возмущений данных о скорости ветра в следующие друг за другом промежутки времени Δt и по результатам измерений скорости ветра V0 в начале каждого промежутка и при его окончании V1 на каждом i интервале в блоке сравнения формируются данные о текущем изменении скорости ветра ΔV=V0-V1, с последующим вычислением и запоминанием его ускорения a i=ΔV/Δt, которое на i+1 интервале сравнивается с новым значением a i+1, при этом результат сравнения λ может определяться, например, следующим образом:
При случайном чередовании положительных и отрицательных значений λ они компенсируют друг друга в реверсивном счетчике, но если положительное значение λ повторится по крайней мере 2n-1 раз при возможных появлениях λ=0, что сигнализирует о возникновении шквалистого ветра, то интервал времени Δt уменьшается в µ раз (µ>1 - некоторое натуральное число, например, 10), и формируются управляющие сигналы с учетом расхождения координат, при этом следующие за этим событием группы из n положительных значений λ сохраняют коэффициент µ без изменений, но корректируют каждый раз управляющие сигналы с учетом расхождения координат. Если отрицательное значение λ повторится, по крайней мере 2n-1 раз подряд при возможных проявлениях λ=0, что сигнализирует об окончании шквала, значение µ принимается равным единице, при этом повторные группы из n отрицательных значений λ сохраняют коэффициент µ без изменений. При значениях λ=0 на любом интервале Δti сигналы управления сохраняются в формате, принятом на интервале Δti-1.
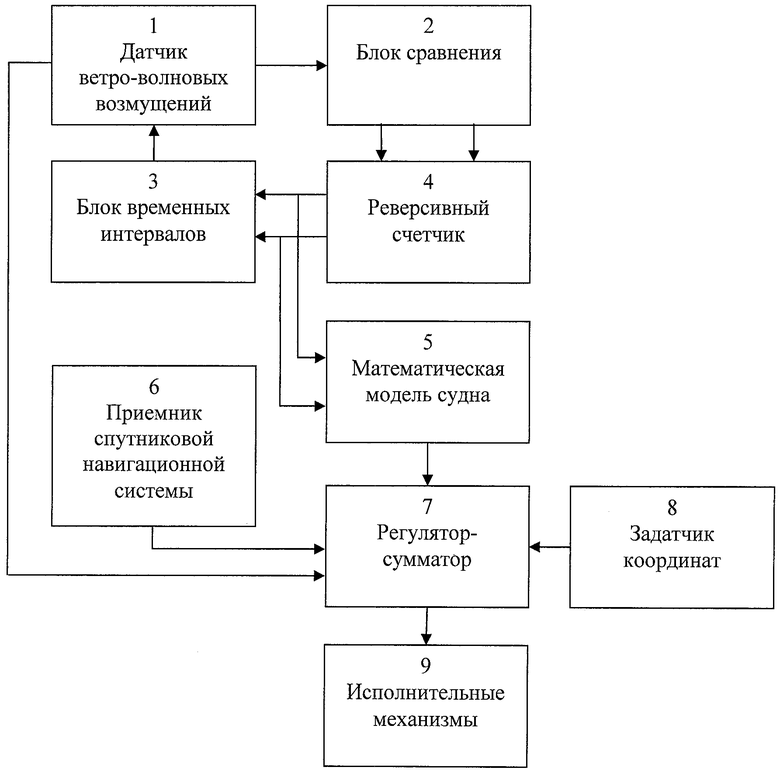
Реализация способа поясняется с помощью схемы, представленной на чертеже. Схема содержит датчик ветроволновых возмущений 1, блок сравнения 2, блок временных интервалов 3, реверсивный счетчик 4, математическую модель судна 5, приемник спутниковой навигационной системы 6, регулятор-сумматор 7, задатчик координат 8 и исполнительные механизмы 9.
Датчик ветроволновых возмущений 1 предназначен для определения внешних метеорологических факторов, в том числе и волновых возмущений. Выходы датчика подключены к блоку сравнения 2 и к регулятору-сумматору 7.
Датчик выдает параметры скорости ветра через интервалы Δt или через интервалы Δt/µ.
Блок сравнения 2 предназначен для сравнения скорости ветра V0 в начале каждого интервала времени Δt или Δt/µ и по истечению этого интервала фиксирует скорость ветра V1. Сравнивая показания V0 и V1 блок сравнения вычисляет изменение скорости ветра ΔV=V0-V1, с последующим вычислением и запоминанием его ускорения a i=ΔV/Δt, которое на i+1 интервале сравнивается с новым значением a i+1. При нарастании ускорения ветра блок вырабатывает параметр λ>0, в противном случае λ<0. При неизменном ускорении значение λ=0.
Блок временных интервалов 3 предназначен для формирования интервалов времени Δt или Δt/µ.
Реверсивный счетчик 4 предназначен для определения момента устойчивого нарастания скорости ветра или устойчивого спада этой скорости. Счетчик рассчитан на n элементов памяти (тактов) влево и вправо от центрального элемента. Исходное состояние счетчика определяется наличием логической единицы в центральном элементе памяти. На счетчик влияют два вида воздействий. К первому виду относятся λ>0, которые продвигают логическую единицу по левым n разрядам. При λ<0 логическая единица продвигается по правым n разрядам. Поэтому при переменном ветровом возмущении на выходе счетчика управляющих сигналов не будет. В случае повторения положительного значения λ по крайней мере 2n-1 раз подряд на одном из выходов реверсивного счетчика появится сигнал, подтверждающий нарастание скорости ветра, и одновременно с этим в центральный элемент памяти вновь записывается логическая единица. Появление указанного сигнала поступает на один из входов блока временных интервалов 3, который вводит поправочный коэффициент µ для интервала времени Δt. Одновременно с этим указанный сигнал поступает на вход математической модели судна 5. Повторные сигналы с реверсивного счетчика по этому входу не могут изменить коэффициент µ, но формируют соответствующие параметры в математической модели судна. Аналогичная картина возникает при повторном появлении, по крайней мере 2n-1 раза значения λ<0, но сигнал управления со счетчика появится на другом его выходе, при этом µ принимается равным 1, а математическая модель судна получает противоположные, чем в первом случае сигналы управления. Указанная ситуация сигнализирует об уменьшении скорости ветра, что характеризует окончание шквала.
Математическая модель судна 5 предназначена для выработки сигналов управления в ускоренном масштабе времени для регулятора сумматора. Математическая модель судна учитывает все существенные параметры судна, внешние ветроволновые возмущения и другие важные с точки зрения позиционирования данные.
Приемник спутниковой навигационной системы 6 определяет с некоторой долей погрешности текущие координаты центра масс судна.
Регулятор-сумматор 7 предназначен для выработки сигналов управления на исполнительные механизмы судна (главная двигательная установка, подруливающие устройства, выдвижные поворотные колонки и т.п.).
Задатчик координат 8 предназначен для ввода данных о координатах точки позиционирования.
Исполнительные механизмы 9 выполняют команды регулятора-сумматора, что обеспечивает неподвижный балансировочный режим путем минимизации расхождения координат центра масс судна с координатами точки позиционирования.
Таким образом, применение данного способа позволяет произвести упреждающее формирование управляющих сигналов исполнительным механизмам судна при его динамическом позиционировании в условиях возникновения шквала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАИВЫГОДНЕЙШЕГО ОПТИМАЛЬНОГО ПУТИ СУДНА | 2014 |
|
RU2570707C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2017 |
|
RU2658469C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ ТАНКЕРА ПРИ ВЫПОЛНЕНИИ ГРУЗОВЫХ РАБОТ | 2011 |
|
RU2462389C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОГО КОЭФФИЦИЕНТА РАЗМНОЖЕНИЯ ЯДЕРНОЙ УСТАНОВКИ | 2010 |
|
RU2442234C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272739C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА В УСЛОВИЯХ ЭКСТРЕМАЛЬНОГО ВОЛНЕНИЯ | 2016 |
|
RU2647357C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2007 |
|
RU2350506C1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2014 |
|
RU2561229C1 |
Изобретение относится к области автоматического управления судами при их динамическом позиционировании в заданной точке мирового океана без постановки на якорь. На основании получаемых от датчика ветро-волновых возмущений данных о скорости ветра в следующие друг за другом промежутки времени Δt и по результатам измерений скорости ветра V0 в начале каждого промежутка и Vl при его окончании на каждом i интервале в блоке сравнения формируют данные о текущем изменении скорости ветра ΔV=V0-V1. Далее вычисляют и запоминают ускорение ai=ΔV/Δt, которое на i+1 интервале сравнивают с новым значением ai+1. Результаты сравнения λ>0 или λ<0 в последующем суммируют с очередными результатами сравнения таким образом, что при своем случайном чередовании они компенсируют друг друга. Если же положительное значение λ, повторяется, по крайней мере, 2n-1 раз при возможных появлениях λ=0, то интервал времени Δt уменьшают в µ раз, что сигнализирует о возникновении шквалистого ветра. На этой основе формируют управляющие сигналы с учетом расхождения координат, при этом для следующих за этим событием групп из n положительных значений λ сохраняют коэффициент µ без изменений, но корректируют каждый раз управляющие сигналы с учетом расхождения координат. Если же отрицательное значение λ повторяется, по крайней мере, 2n-1 раз подряд при возможных появлениях λ=0, значение µ принимают равным единице. При этом для повторных групп из n отрицательных значений λ сохраняют коэффициент µ без изменений, что сигнализирует об окончании шквала. При значениях λ=0 на любом интервале Δti сигналы управления сохраняют в формате, принятом на интервале Δti-1. Изобретение обеспечивает упреждающее формирование управляющих сигналов исполнительным механизмам судна при его динамическом позиционировании в условиях возникновении шквала. 1 ил.
Способ динамического позиционирования судна при возникновении шквала с использованием приемника спутниковой навигационной системы, датчика ветроволновых возмущений, математической модели судна, регулятора-сумматора, на вход которого подают сигналы текущего расхождения координат центра масс судна с координатами точки позиционирования от задатчика координат и данные ветроволновых возмущений, а на выходе которого формируют суммарные управляющие сигналы для исполнительных механизмов, отличающийся тем, что для упреждающего формирования управляющих сигналов исполнительным механизмам судна при его динамическом позиционировании в условиях возникновении шквала на основании получаемых от датчика ветроволновых возмущений данных о скорости ветра в следующие друг за другом промежутки времени Δt и по результатам измерений скорости ветра V0 в начале каждого промежутка и Vl при его окончании на каждом i-м интервале в блоке сравнения формируют данные о текущем изменении скорости ветра ΔV=V0-V1 с последующим вычислением и запоминанием ускорения ai=ΔV/Δt, которое на (i+1)-м интервале сравнивают с новым значением ai+1, при этом результаты сравнения λ>0 или λ<0 в последующем суммируют с очередными результатами сравнения таким образом, что при своем случайном чередовании они компенсируют друг друга, но если положительное значение λ повторяется, по крайней мере, 2n-1 раз при возможных появлениях λ=0, то интервал времени Δt уменьшают в µ раз, что сигнализирует о возникновении шквалистого ветра, и на этой основе формируют управляющие сигналы с учетом расхождения координат, при этом для следующих за этим событием групп из n положительных значений λ сохраняют коэффициент µ без изменений, но корректируют каждый раз управляющие сигналы с учетом расхождения координат, если отрицательное значение λ повторяется, по крайней мере, 2n-1 раз подряд при возможных появлениях λ=0, значение µ принимают равным единице, при этом для повторных групп из n отрицательных значений λ сохраняют коэффициент µ без изменений, что сигнализирует об окончании шквала, при значениях λ=0 на любом интервале Δti сигналы управления сохраняют в формате, принятом на интервале Δti-1.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2319641C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СУДНОМ С ДИАГНОСТИКОЙ | 2004 |
|
RU2267440C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ФАЗОВОГО СОСТОЯНИЯ СУДНА | 2002 |
|
RU2221726C1 |

