Накопитель грузовых поддонов, сложенных попарно друг в друга
Изобретение относится к оборудованию, предназначенному для накопления, хранения и выдачи грузовых поддонов.
Известен накопитель грузовых поддонов, содержащий в своем составе коробовидные боковые секции, включающие механизмы подъема поддонов, и заднюю стенку, в которой располагается привод установки и механизм синхронизации подъемных механизмов в боковых секциях, при этом работа этого накопителя осуществляется со стандартными стопками из нормально ориентированных в пространстве поддонов, расположенных основанием вниз (патент WO/1997/039968, МПК B65G 57/30, B65G 59/06, 30.10.97).
Недостатком известного устройства является невозможность работать со стопками, состоящими из попарно сложенных друг в друга поддонов, что исключает возможность полной автоматизации технологического процесса выдачи поддонов из таких стопок в употребление, а также повышает риск вреда здоровью персонала и порчи поддонов за счет задействования в процессе разборки стопки ручного труда.
Задача, решаемая предлагаемым изобретением, заключается в автоматизации процесса разборки стопок, состоящих из пар вложенных друг в друга поддонов.
Поставленная задача решается тем, что накопитель грузовых поддонов, включающий коробовидный корпус, состоящий из двух боковых секций и задней стенки, блок управления и подъемный механизм, содержащий привод, передаточные узлы и каретки, перемещающиеся в вертикальном направлении, механизм синхронизации кареток подъемных механизмов боковых секций, отличающийся тем, что подъемный механизм содержит расположенный в горизонтальной плоскости между боковыми секциями корпуса приводной переворотный стол, включающий горизонтальную ось вращения, расположенную между каретками подъемного механизма, приводной механизм для фиксации поддона на переворотном столе и приводной механизм выталкивания поддона, содержащий как минимум один толкатель, перемещающийся параллельно направлению выдачи поддона, а в каждой из боковых секций корпуса расположен как минимум один приводной механизм захвата поддона, включающий движитель и связанный с ним захват, и как минимум один приводной механизм захвата стопки, включающий движитель и связанный с ним захват, при этом механизм захвата поддона расположен выше переворотного стола в точке его вращения, механизм захвата стопки расположен выше механизма захвата поддона, а на переворотном столе расположен как минимум один датчик наличия поддона на полу и один датчик наличия поддона на переворотном столе. Движитель кареток подъемного механизма может быть выполнен электромеханическим, или гидравлическим, или пневматическим приводом. Для сообщения движения от движителей к кареткам может быть применена цепная передача, или ременная передача, или зубчатая передача, или передача винт-гайка, или передача с помощью пневмоцилиндра или гидроцилиндра. Синхронизация кареток в боковых секциях может быть выполнена программно на уровне контроллеров движителей, или механически с помощью синхронизирующего вала. Движители механизма захвата поддона могут быть выполнены электромеханическими, или гидравлическими, или пневматическими приводами. Лапки механизма захвата поддона могут быть выполнены поворотными или выдвижными. Лапки механизма захвата поддона могут представлять собой стержни для прохода между шашками поддона или спрессовывающие площадки для зажатия поддона за его боковые поверхности. Движители механизма захвата стопки могут быть выполнены электромеханическими, или гидравлическими, или пневматическими приводами. Лапки механизма захвата стопки могут быть выполнены поворотными или выдвижными. Лапки механизма захвата стопки могут представлять собой стержни для прохода между шашками поддона или спрессовывающие площадки для зажатия поддона за его боковые поверхности. Приводы вращения переворотного стола могут быть выполнены электромеханическими, или гидравлическими, или пневматическими. Приводы механизма для фиксации поддона на столе при вращении могут быть выполнены электромеханическими, или гидравлическими, или пневматическими. Приводы механизма для выталкивания поддона могут выполнены электромеханическими, или гидравлическими, или пневматическими. Датчики наличия поддона на полу и на переворотном столе могут быть смонтированы на задней стенке или на переворотном столе. Датчики наличия поддона на полу и на переворотном столе могут быть оптическими или акустическими. Достигаемый технический результат заключается в возможности разборки накопителем поддонов компактно собранных стопок, где поддоны попарно сложены друг в друга основаниями, в автоматическом режиме с выдачей поддона для сотрудника в правильно ориентированном положении в пространстве вне зависимости от того, как поддон был сориентирован в начальной стопке.
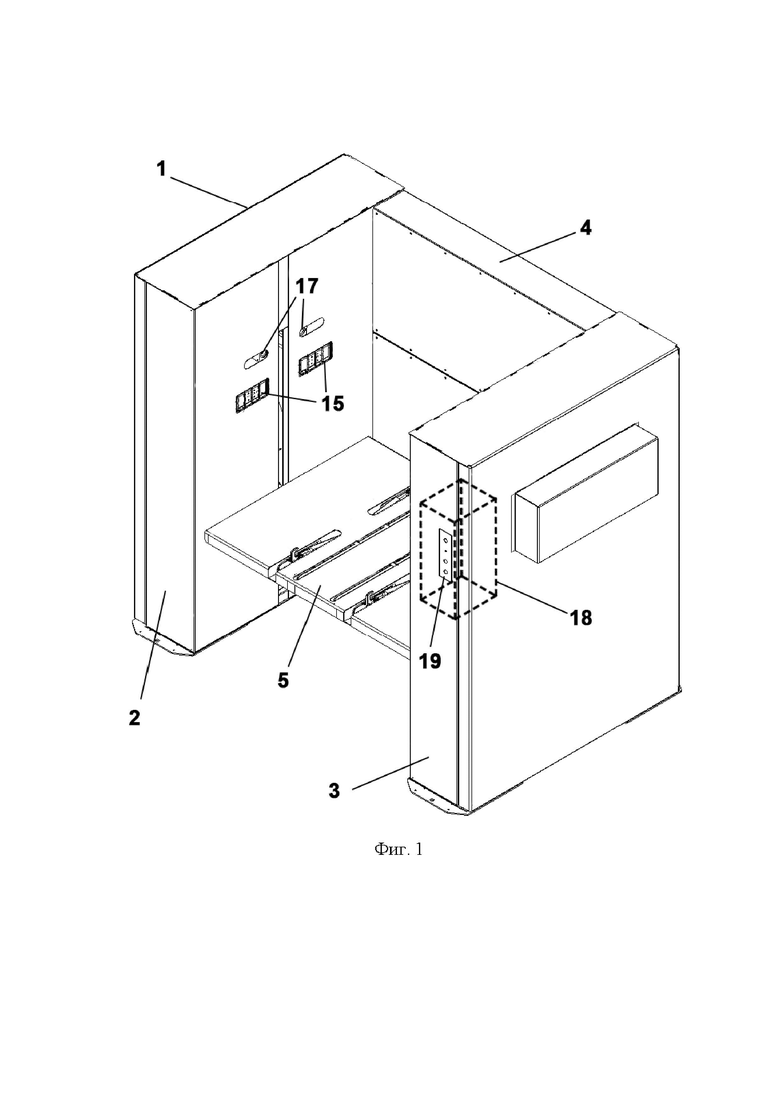
На фиг. 1 представлен общий вид накопителя поддонов.
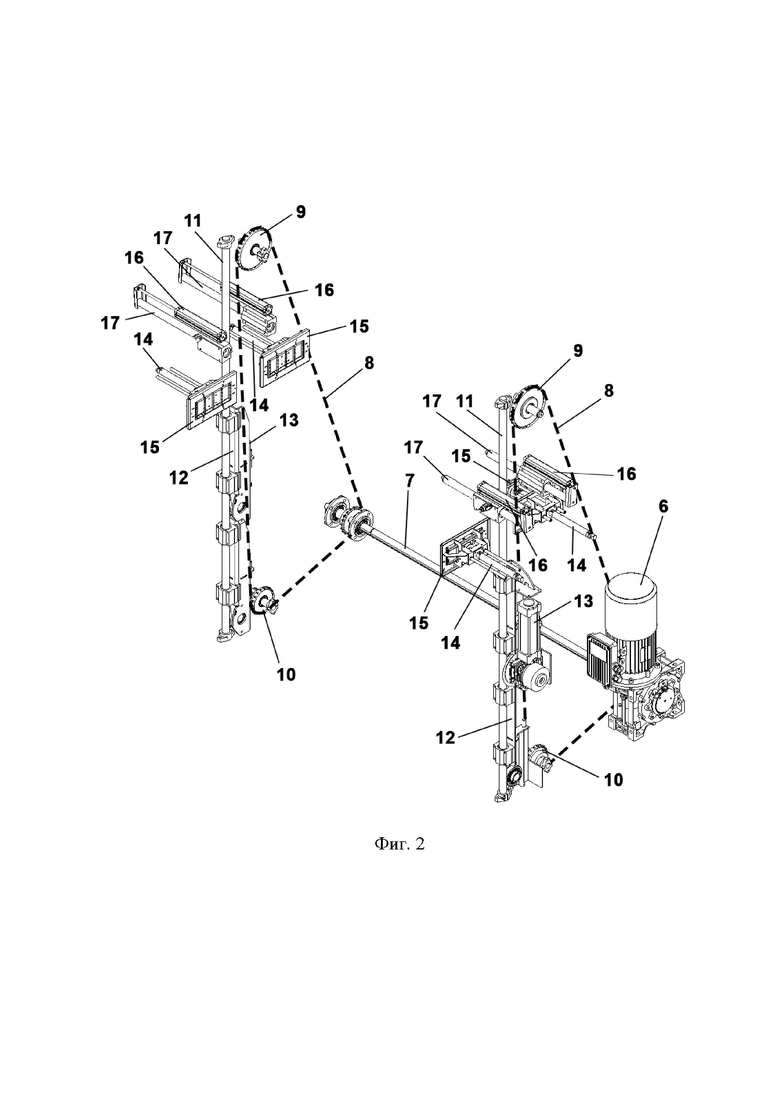
На фиг. 2 схематически показана механика накопителя, включающая подъемный механизм, механизм захвата поддона и механизм захвата стопки.
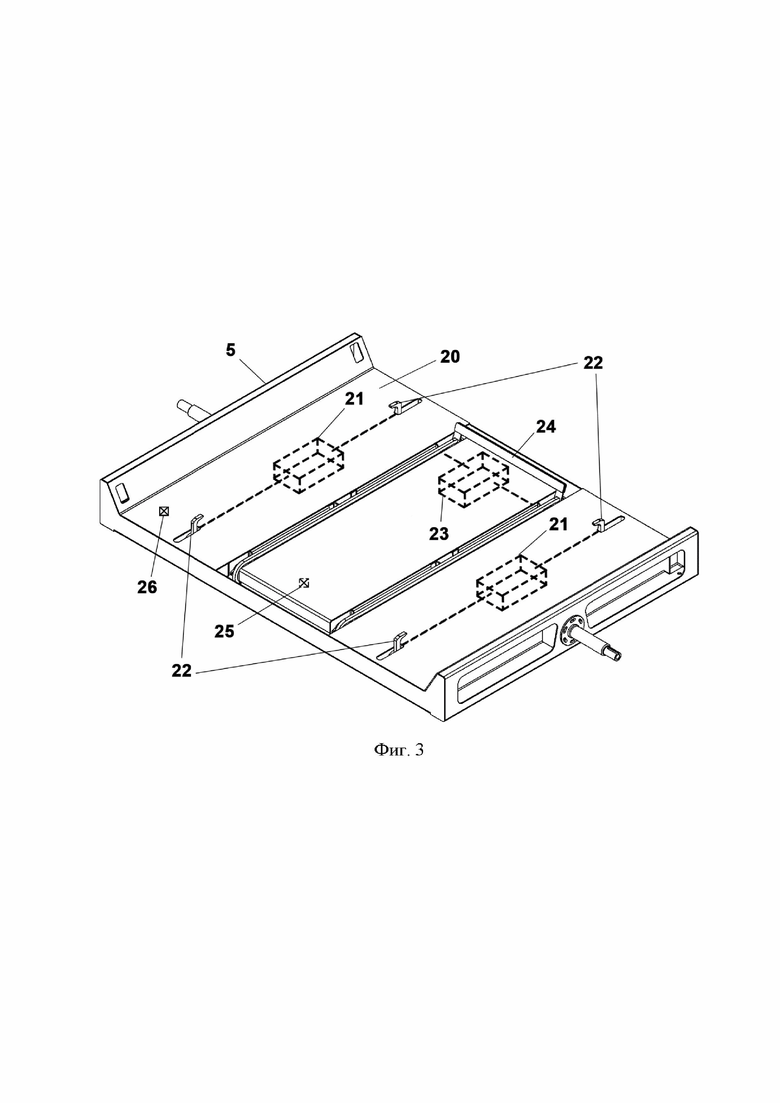
На фиг. 3 показан переворотный стол.
В состав накопителя грузовых поддонов 1 входят боковые секции 2 и 3, задняя стенка 4, а также переворотный стол 5. Как минимум одна из боковых секций содержит движитель подъемного механизма 6. Задняя стенка 4 содержит вал синхронизации подъемных механизмов 7. Каждая из боковых секций содержит подъемный механизм, включающий цепь 8, звезды 9 и 10, направляющую 11 и каретку 12, снабженную приводом 13 вращения переворотного стола, как минимум один механизм захвата поддона, включающий привод 14 и захват 15, как минимум один механизм захвата стопки, содержащий привод 16 и захват 17. Модуль управления накопителем 18 расположен внутри корпуса накопителя, при этом пульт управления 19 расположен как минимум на одной из боковых секций. Переворотный стол 5 содержит панель стола 20, механизм фиксации поддона, включающий привода 21 и захваты 22, а также механизм выталкивания поддона, содержащий привод 23 и толкатель 24. На переворотном столе 5 расположены датчик 25 наличия поддона под столом, обращенный вниз, и датчик 26 наличия поддона на столе, обращенный вверх.
Принцип работы состоит в том, что накопитель 1 имеет возможность разбирать стопки из поддонов, сложенных попарно друг в друга. Стопка, состоящая из таких пар и стоящая на правильно сориентированном поддоне, завозится в накопитель 1 и ставится на переворотный стол 5 с помощью вилочного погрузчика, после чего на пульте управления 19 активируется режим разбора стопки и выдачи поддонов, при этом толкатель 24 спрятан под плоскостью панели стола 20 со стороны, расположенной ближе к задней стенке 4. Модуль управления дает команду приводам 21 механизма фиксации поддона на выдвижение захватов 22, тем самым зажав нижний правильно ориентированный поддон за доски основания, а далее запускает движитель подъемного механизма 6, который передает движение через вал синхронизации 7, цепь 8 и звезды 9,10 на каретки 12, поднимающиеся по направляющим 11. Переворотный стол 5, связанный своими осями с каретками 12, поднимает стопку поддонов до уровня, где первая пара вложенных друг в друга поддонов, стоящая на нижнем нормально ориентированном поддоне, встает напротив захватов 17 механизма захвата стопки, после чего модуль управления 18 дает команду приводам 16 механизма захвата стопки на выдвижение захватов 17, после чего происходит фиксация всей стопки, кроме нижнего правильно ориентированного поддона и лежащего на нем перевернутого поддона. Далее переворотный стол 5 на каретках 12 опускается вниз вместе с двумя поддонами до уровня, где захваты 15 механизма захвата поддона стоят напротив перевернутого поддона. После этого модуль управления дает команду приводам 14 механизма захвата поддона выдвинуть захваты 15, тем самым зафиксировав верхний в паре поддон, который перевернут. Далее стол с правильно ориентированным поддоном продолжает движение вниз до нижней точки, где модуль управления дает сигнал на разблокировку захватов 22 механизма фиксации поддона, а затем на включение привода 23, чтобы выдвинуть толкатель 24 из панели стола 20 и переместить ее в направлении к выходу из накопителя 1 и тем самым вытолкнуть поддон на пол перед накопителем 1. При успешном выталкивании поддона датчик 26 передает сигнал об этом в модуль управления 18, который следом дает команду на уход толкателя 24 под панель стола 20 со стороны, расположенной ближе к выходу из накопителя 1, и команду на подъем стола до зафиксированного в захватах 15 перевернутого поддона, где выдвигаются захваты 22 механизма фиксации поддона и зажимают перевернутый поддон за доски настила, после чего перевернутый поддон разблокируется, путем увода захватов 15 механизма захвата поддона внутрь боковых секций 2 и 3. Далее этот поддон, зафиксированный на переворотном столе 5, опускается до нижней точки, где возможно вращение переворотного стола 5 вместе с поддоном вокруг осей зафиксированных в каретках 12. Далее модуль управления дает команду приводам 13 на вращение переворотного стола 5, на котором зафиксирован перевернутый поддон, на 180 градусов, чтобы поддон был верно сориентирован в пространстве, а толкатель 24 оказался снизу стола, ближе к задней стенке. После этого переворотный стол 5 в инвертированном положении опускается до нижней точки, где убираются захваты 22 механизма фиксации поддона, и поддон ложится на пол в правильно ориентированном положении, после чего толкатель 24 выталкивает поддон в область перед накопителем 1. Далее при сигнале датчика 25, подтверждающем отсутствие поддона под переворотным столом 5, стол поднимается до высоты, где возможно его вращение, и за счет приводов 13 возвращается в исходное положение путем поворота на 180 градусов вокруг оси, расположенной между каретками 12, а затем поднимается к стопке, зафиксированной захватами 17 механизма захвата стопки, после чего выдвигаются захваты 22 механизма фиксации поддона и зажимают нижний правильно ориентированный поддон, затем убираются захваты механизма захвата стопки, и переворотный стол 5 вместе со стопкой опускается вниз до уровня, где первая пара вложенных друг в друга поддонов, стоящая на нижнем нормально ориентированном поддоне, встает напротив захватов 17 механизма захвата стопки, затем выдвигаются захваты 16 механизма захвата стопки, после чего происходит фиксация всей стопки, кроме нижнего правильно ориентированного поддона и лежащего на нем перевернутого поддона, тем самым замыкается цикл работы накопителя 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство подачи поддонов | 2024 |
|
RU2831857C1 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| "Устройство для укладки кирпича в пакеты типа "елка" | 1990 |
|
SU1763200A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1299772A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ БЛОКОВ ПРЕССОВАНИЕМ, ПРЕСС-ФОРМА И ЛИНИЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1995 |
|
RU2087307C1 |
| Устройство для автоматической простановки стержней | 1985 |
|
SU1268281A1 |
| Автоматическо устройство для захвата,хранения и освобождения цилиндрических изделий,транспортируемых конвейером | 1973 |
|
SU510420A1 |
| ФРОНТАЛЬНО-КОЗЛОВОЙ ТРУБОУКЛАДЧИК | 2011 |
|
RU2485384C2 |
| АППАРАТ ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ ФОТОЭЛЕКТРОФОРЕЗОМ | 1973 |
|
SU404290A1 |
| Механизированный многоярусный накопитель | 1988 |
|
SU1699866A1 |
Изобретение относится к оборудованию, предназначенному для накопления, хранения и выдачи поддонов. Накопитель грузовых поддонов включает коробовидный корпус из боковых секций и задней стенки, блок управления и подъемный механизм, содержащий привод, передаточные узлы и каретки, механизм синхронизации кареток подъемных механизмов боковых секций. Подъемный механизм содержит расположенный между боковыми секциями корпуса приводной переворотный стол, приводные механизмы для фиксации и выталкивания поддона. Стол включает горизонтальную ось вращения, расположенную между каретками подъемного механизма. Приводной механизм выталкивания поддона содержит как минимум один толкатель, перемещающийся параллельно направлению выдачи поддона. В каждой из боковых секций корпуса расположен как минимум один приводной механизм захвата поддона, расположенный выше стола в точке его вращения и включающий движитель, связанный с ним захват и как минимум один приводной механизм захвата стопки. Механизм захвата стопки включает движитель и связанный с ним захват и расположен выше механизма захвата поддона. На столе расположены как минимум по одному датчику наличия поддона на полу и на столе. Достигается возможность автоматизации процесса разборки стопок, состоящих из пар вложенных друг в друга поддонов. 14 з.п. ф-лы, 3 ил. 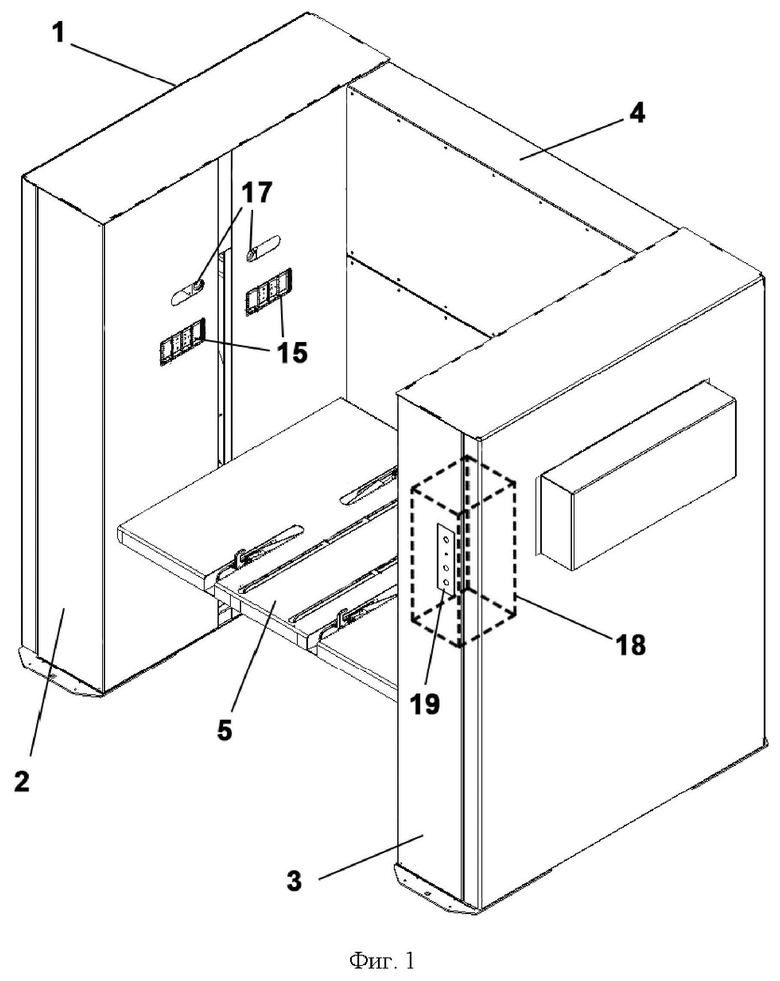
1. Накопитель грузовых поддонов, включающий коробовидный корпус, состоящий из двух боковых секций и задней стенки, блок управления и подъемный механизм, содержащий привод, передаточные узлы и каретки, перемещающиеся в вертикальном направлении, механизм синхронизации кареток подъемных механизмов боковых секций, отличающийся тем, что подъемный механизм содержит расположенный в горизонтальной плоскости между боковыми секциями корпуса приводной переворотный стол, включающий горизонтальную ось вращения, расположенную между каретками подъемного механизма, приводной механизм для фиксации поддона на переворотном столе и приводной механизм выталкивания поддона, содержащий как минимум один толкатель, перемещающийся параллельно направлению выдачи поддона, а в каждой из боковых секций корпуса расположен как минимум один приводной механизм захвата поддона, включающий движитель и связанный с ним захват, и как минимум один приводной механизм захвата стопки, включающий движитель и связанный с ним захват, при этом механизм захвата поддона расположен выше переворотного стола в точке его вращения, механизм захвата стопки расположен выше механизма захвата поддона, а на переворотном столе расположен как минимум один датчик наличия поддона на полу и один датчик наличия поддона на переворотном столе.
2. Накопитель грузовых поддонов по п.1, отличающийся тем, что движитель кареток подъемного механизма выполнен электромеханическим, или гидравлическим, или пневматическим приводом.
3. Накопитель грузовых поддонов по п.1, отличающийся тем, что для сообщения движения от движителей к кареткам может быть применена цепная передача, или ременная передача, или зубчатая передача, или передача винт-гайка, или передача с помощью пневмоцилиндра или гидроцилиндра.
4. Накопитель грузовых поддонов по п.1, отличающийся тем, что синхронизация кареток в боковых секциях выполнена программно на уровне контроллеров движителей или механически с помощью синхронизирующего вала.
5. Накопитель грузовых поддонов по п.1, отличающийся тем, что движители механизма захвата поддона выполнены электромеханическими, или гидравлическими, или пневматическими приводами.
6. Накопитель грузовых поддонов по п.1, отличающийся тем, что лапки механизма захвата поддона выполнены поворотными или выдвижными.
7. Накопитель грузовых поддонов по п.1, отличающийся тем, что лапки механизма захвата поддона представляют собой стержни для прохода между шашками поддона или спрессовывающие площадки для зажатия поддона за его боковые поверхности.
8. Накопитель грузовых поддонов по п.1, отличающийся тем, что движители механизма захвата стопки выполнены электромеханическими, или гидравлическими, или пневматическими приводами.
9. Накопитель грузовых поддонов по п.1, отличающийся тем, что лапки механизма захвата стопки выполнены поворотными или выдвижными.
10. Накопитель грузовых поддонов по п.1, отличающийся тем, что лапки механизма захвата стопки представляют собой стержни для прохода между шашками поддона или спрессовывающие площадки для зажатия поддона за его боковые поверхности.
11. Накопитель грузовых поддонов по п.1, отличающийся тем, что приводы вращения переворотного стола выполнены электромеханическими, или гидравлическими, или пневматическими.
12. Накопитель грузовых поддонов по п.1, отличающийся тем, что приводы механизма для фиксации поддона на столе при вращении выполнены электромеханическими, или гидравлическими, или пневматическими.
13. Накопитель грузовых поддонов по п.1, отличающийся тем, что приводы механизма для выталкивания поддона выполнены электромеханическими, или гидравлическими, или пневматическими.
14. Накопитель грузовых поддонов по п.1, отличающийся тем, что датчики наличия поддона на полу и на переворотном столе могут быть смонтированы на задней стенке или на переворотном столе.
15. Накопитель грузовых поддонов по п.1, отличающийся тем, что датчики наличия поддона на полу и на переворотном столе могут быть оптическими или акустическими.
| WO 9739968 A1, 30.10.1997 | |||
| CN 114955574 A, 30.08.2022 | |||
| Устройство для накопления и поштучной выдачи поддонов | 1990 |
|
SU1771975A1 |
| 0 |
|
SU213418A1 | |
| WO 2020200383 A1, 08.10.2020. | |||

