Изобретение относится к подъемно- транспортному оборудованию, в частности к межоперационным накопительным устройствам в технологических линиях машиностроительных предприятий.
Цель изобретения - улучшение эксплуатационных характеристик путем обеспечения возможности использования в технологическом оборудовании .
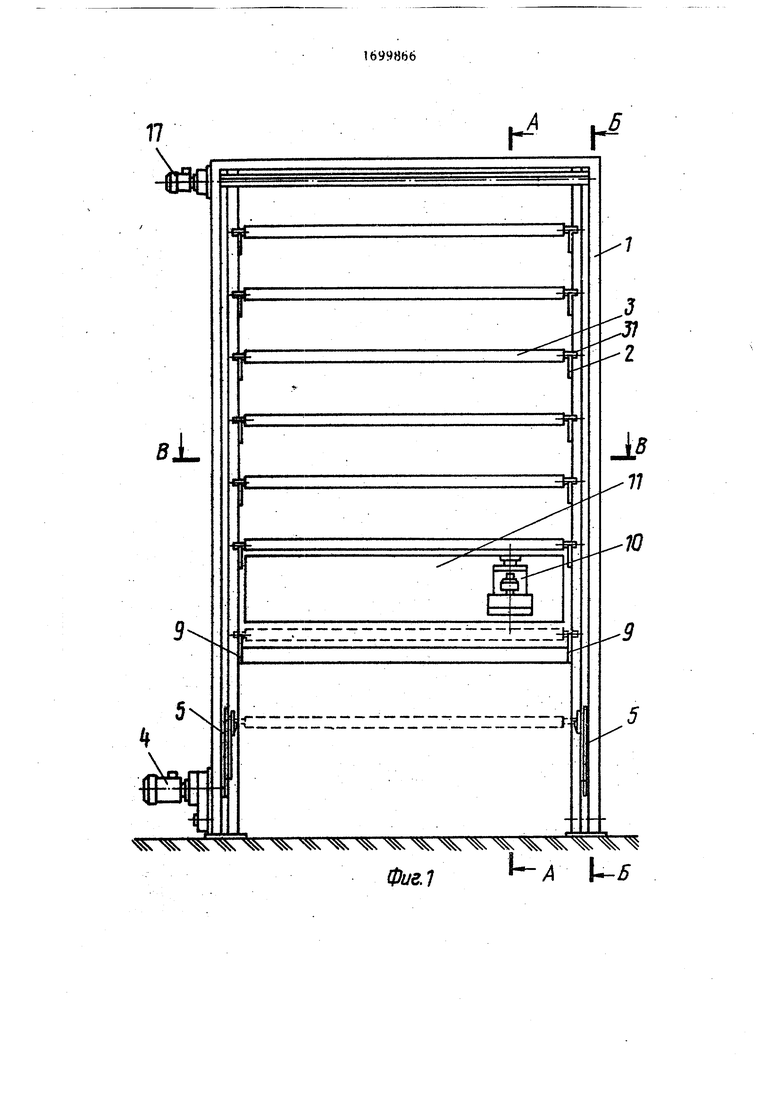
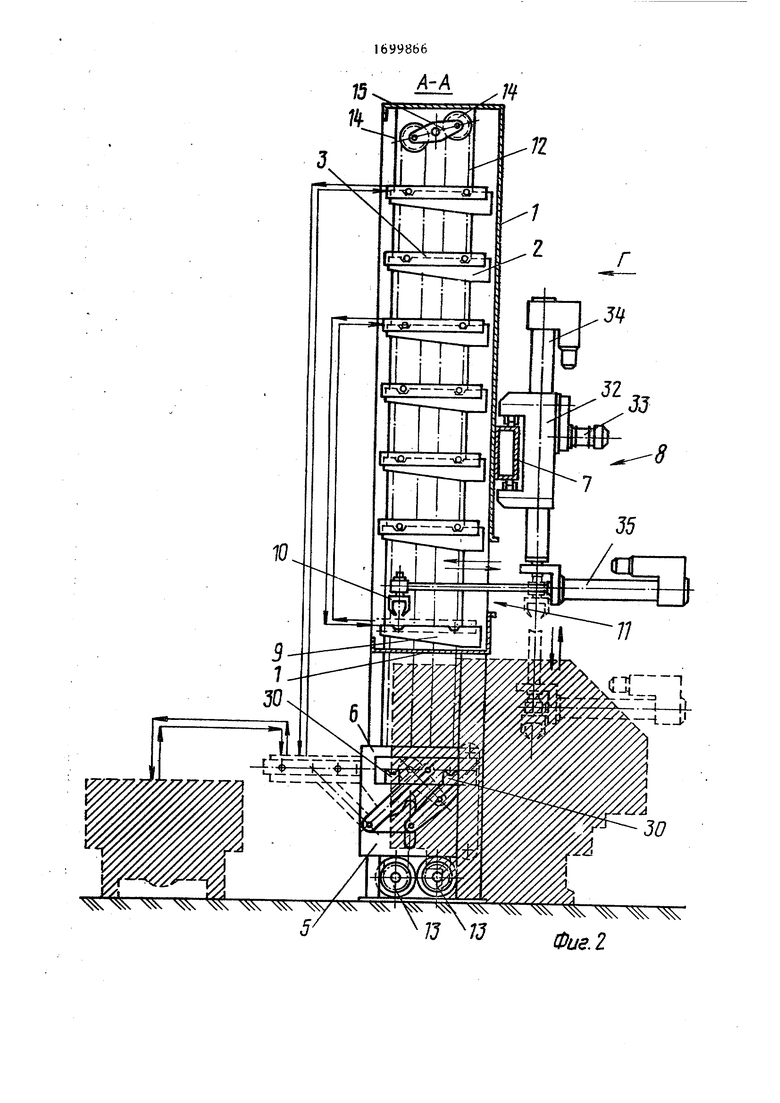
На фиг. 1 изображен накопитель со стороны выдвижения захватов и полок; на фиг. 2 - разрез А-А на фиг.1;
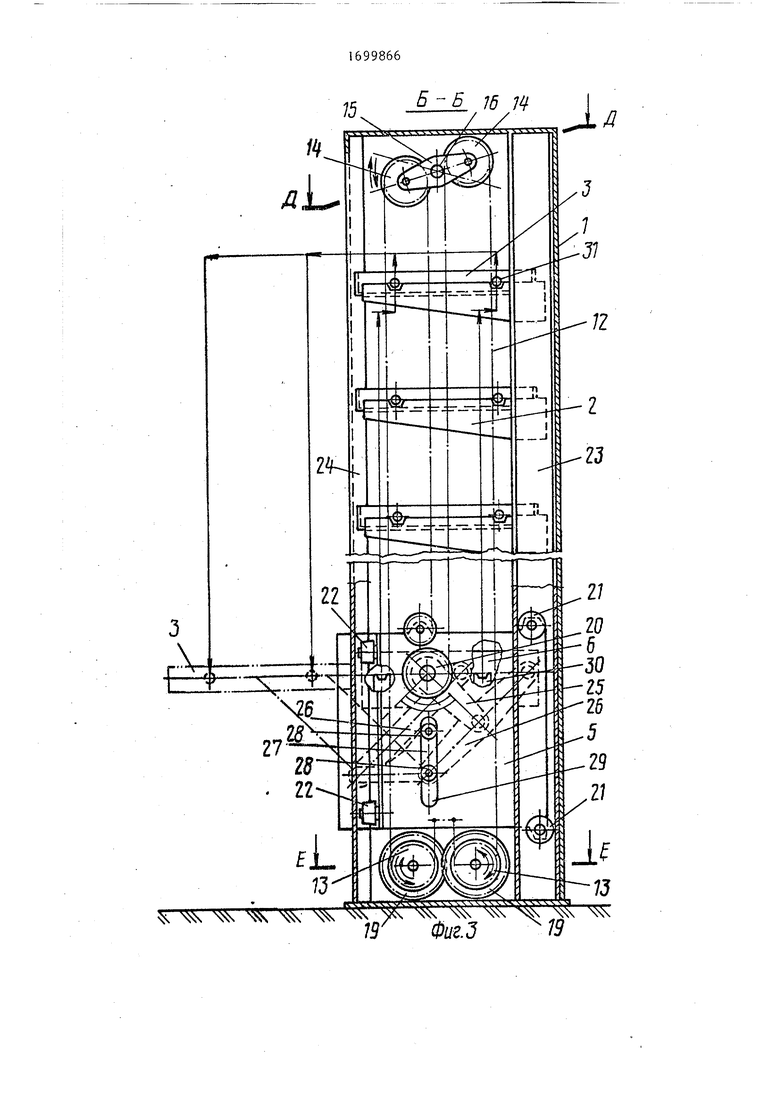
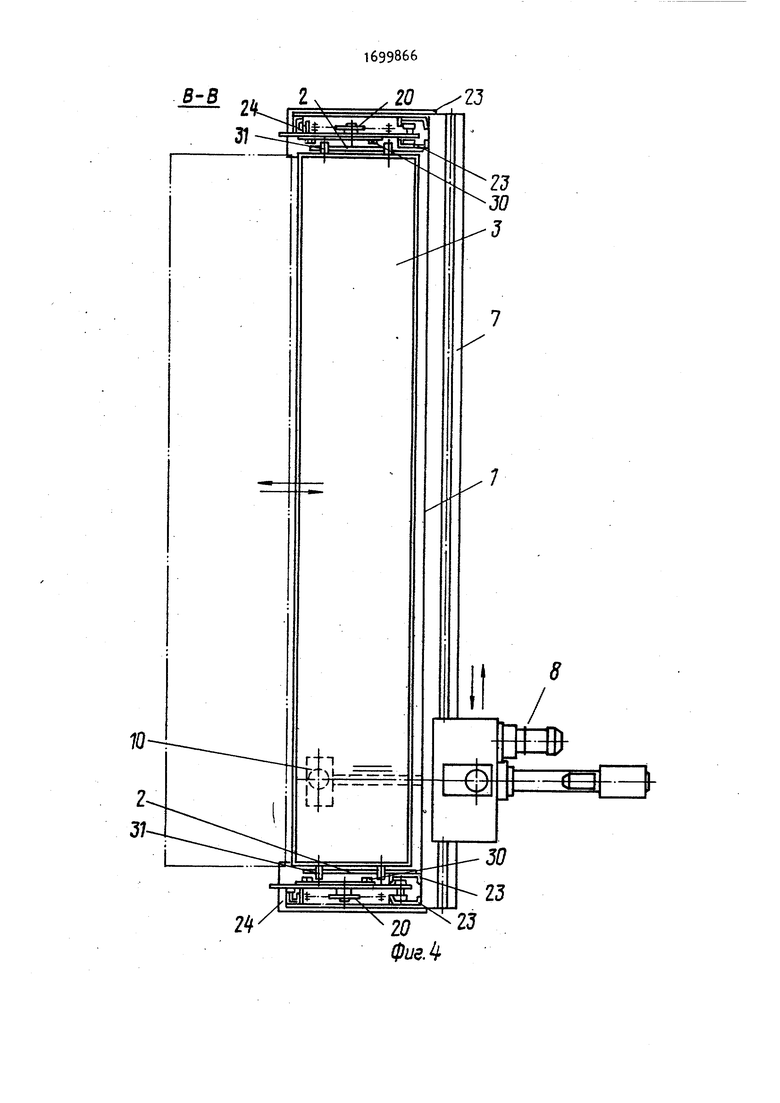
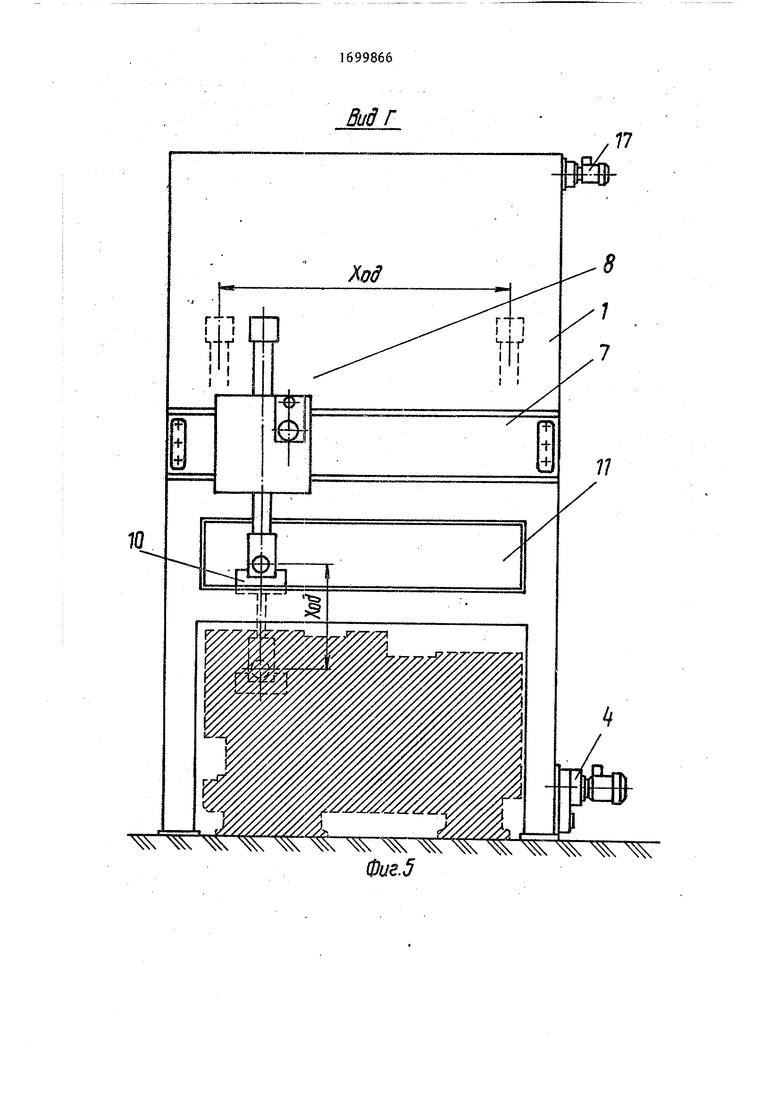
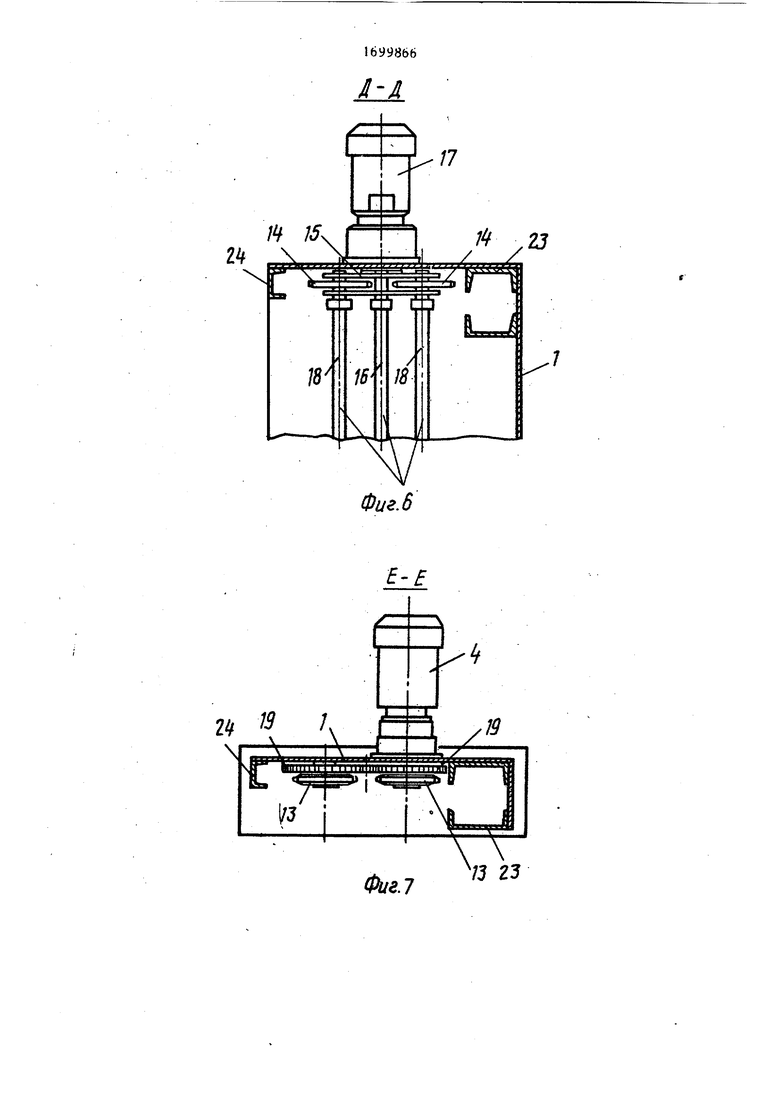
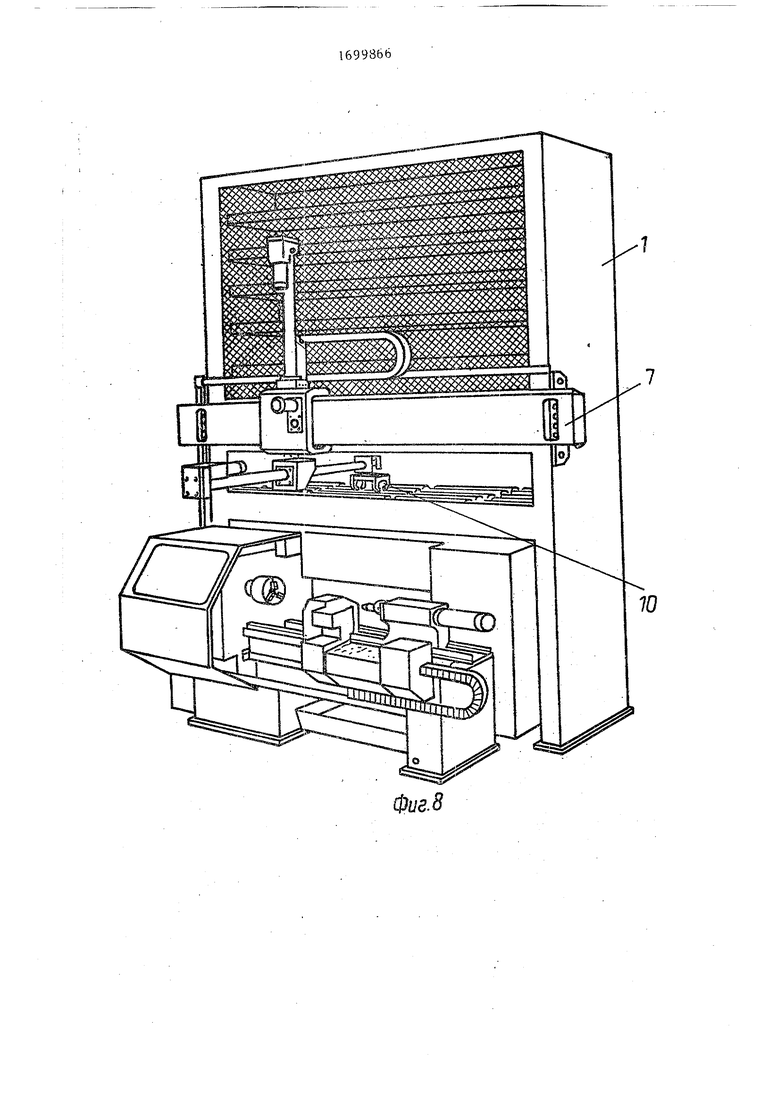
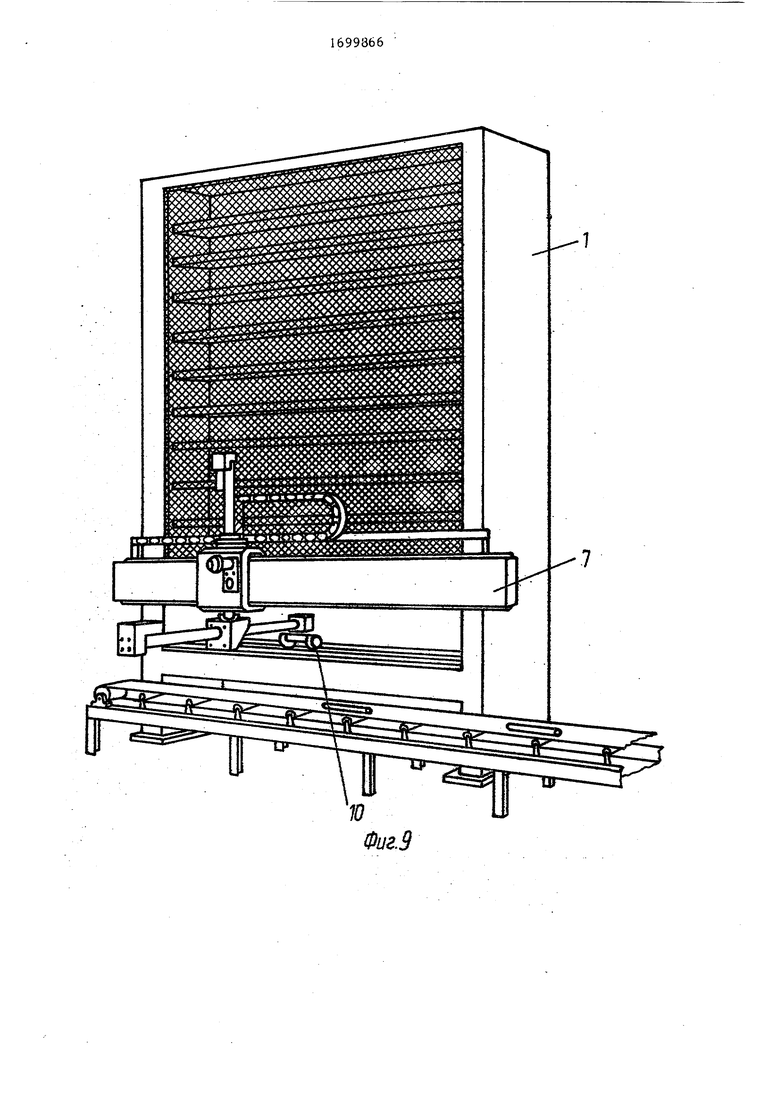
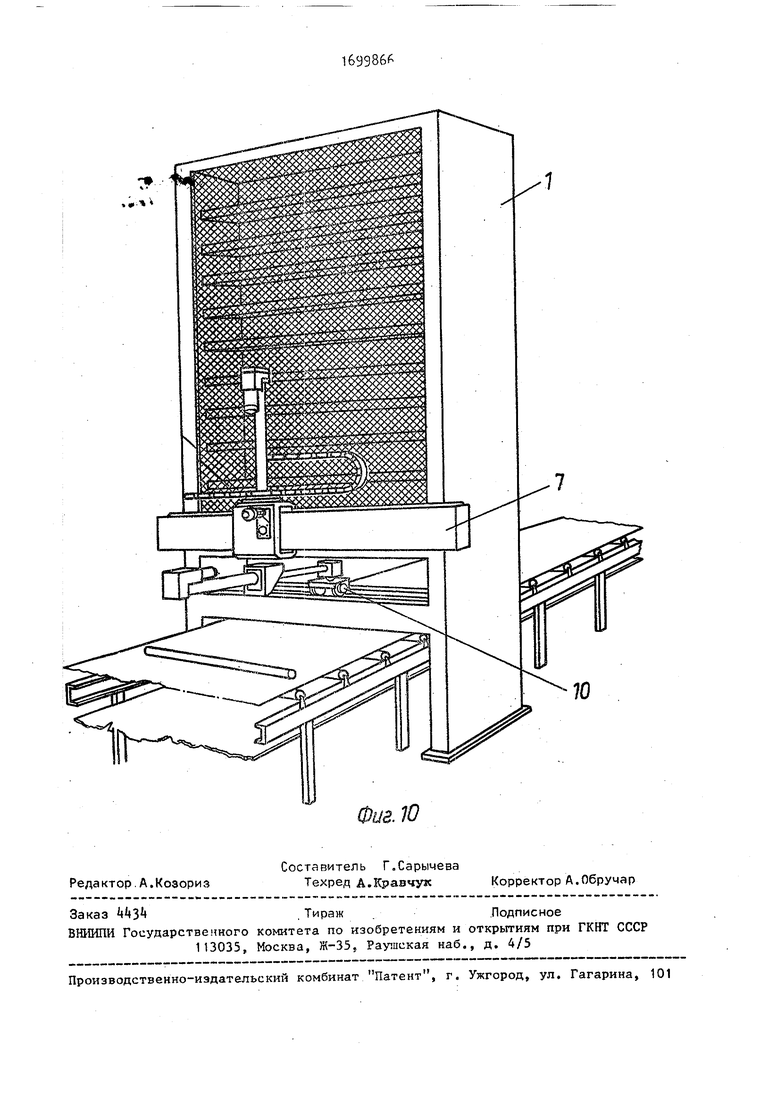
на фиг. 3 - разрез Б-Б на фиг.1; на фиг. k - разрез В-В на фиг.1; на фиг. 5 - вид Г на фиг.2; на фиг.6 - разрез Д-Д на фиг.З,1 на фиг. 7 разрез Е-Е на фиг.З, на фиг. 8 - комплекс накопитель - токарный станок; на фиг. У - комплекс накопитель - продольный конвейер, на фиг.10 - комплекс накопитель - поперечный конвейер.
В корпусе 1 механизированного многоярусного накопителя размещены несущие кронштейны 2, на которых установлены съемные грузовые
с& со со
00
о о
полки 3, и связанные с электроприводом b подъемно-опускные каретки
5,расположенные с боковых сторон полок 3 по их ширине и оснащенные выдвижными захватами 6 для взаимодействия с боковыми сторонами полки 3.
На противоположной от направления выдвижения захватов 6 стороне (задней стенке) корпуса 1 смонтирована горизонтальная направляющая балка 7 с подвижно установленным на ней промышленным роботом-мани пулятором 8.
Корпус t оснащен дополнительными свободными кронштейнами 9 для поддержания одной из полок 3 в зоне действия схвата 10 робота 8 и выполнен с проемом 11 для ввода схвата 10 в зону размещения одной из полок 3 на дополнительных кронштейнах 9.
К каждой каретке 5 прикреплены концы цепи 12 (фиг.2), огибающей звездочки 13 смонтированные в нижней части корпуса, и качающиеся зведочки 14, установленные в верхней части корпуса на коромысле 15 Коромысла 15 с обеих сторон накопителя жестко закреплены на общем валу 16 (фиг.6), связанном с электроприводом 17 а звездочки И противоположных сторон соединены между собой валами 18.
Звездочки 13 с одной стороны накопителя через шестерни 19 соединены с электроприводом . Каждая цепь 12 образует петлю, охватывающую звездочку 20, установленную на соответствующей каретке 5. Каждая каретка 5 оснащена катками 21 и 22 (фиг.З) предназначенными для перемещения по вертикальным направляющи 23 и 2k соответственно, прикрепленным к корпусу 1 накопителя.
Каждая звездочка 20 соединена через рычажно-кулисный механизм с соответствующим выдвижным захватом
6.Каждый рычажно-кулисный механизм состоит из маятникового рычага 25, параллельных рычагов 26 и ползуна 27. Маятниковый рычаг 25 жестко насажен на ось звездочки 20 и шарнирна соединен с одним из параллельных рычагов 26. Рычаги 26 шарнирно соединены с захватом 6 и ползуном 27. Ползун оснащен роликами 28, подвижно раз10
15
20
25
99866а
мещенными в вертикальной прорези 29 каретки. Каждый захват 6 имеет упоры 30 с углублениями под цапфы 31 с грузовых полок 3, посредством которых последние опираются на несущие 2 и дополнительные 9 кронштейны.
Робот 8 имеет суппорт 32 (фиг.2), подвижно смонтированный на горизонтальной направляющей балке 7 посредством электропривода 33. Суппорт оснащен гидроцилиндром З1 вертикального перемещения схвата 10 робота и гидроцилиндром 35 горизонтального перемещения схвата. Схват 10 приводится в действие гидравлической системой (не показана). Управление механизированного многоярусного накопителя производится автоматически с помощью электросхемы и концевых выключателей (не показаны).
Накопитель действует следующим образом.
В исходном состоянии накопителя каретки 5 занимают крайнее нижнее положение, а упоры 30 захватов 6 несколько смещены по горизонтали относительно цапф 31 полок 3. Включается электропривод Ь и через шестерни 19 вращает звездочки 13 одна навстречу другой. При этом внешние ветви цепей 12 с одинаковой скоростью двигаются вниз, а внутренние их ветви также с одинаковой скоростью перемещаются -вверх, увлекая за собой каретки 5 с помощью петель, охватывающих звейлочки 20.
В раионе задаиной полки 3, например самой верхней, несколько ниже ее цапф 31 электропривод Ц останавливается и включается электропривод 17. При этом коромысла 15 начинают поворачиваться против часовой стрелки и вместе с ними в противоположных направлениях перемещаются оси качающихся звездочек 1А. Это вызывает перетягивание внутренних ветвей цепей 12 также в противоположных направлениях, что, в свою очередь, вызывает поворот звездочек 20 против часовой стрелки. Поворот звездочек 20 через рычажно-кулисные механизмы вызывает некоторое горизонтальное перемещение захватов 6 до положения размещения упоров 30 непосредственно под цапфами 31 самой верхней полки.
Далее вновь включается электропривод k и каретки 5, поднимаясь,
30
35
40
45
5С
55
подхватывают полку 3 за цапфы 31 упорами 30 захватов 6. Когда цапфы 31 окажутся несколько выше кронштейнов 2, электропривод k останавливается, и вновь включается привод 17, поворачивающий теперь коромысла 15 по часовой стрелке. При этом звездочки 20, вращаясь также по часовой стрелке, выдвигают посредство рычажно-кулисных механизмов захваты 6 вместе с полкой 3 за пределы корпуса 1.
Выключается электропривод 17 и включается электропривод k на опускание кареток 5 до нижнего их положения, где выдвинутая и опущенная полка загружается поддонами со штучным грузом, например заготовками для токарного станка. Загруженная полка устанавливается на дополнительные кронштейны 9 путем проведения описанных операций в обратном порядке. После установки полки на кронштейны 9 включается робот 8 и по заданной программе осуществляет схватом 10 поштучную подачу заготовок в станок и возврат обработанных деталей.
Одновременно с работой станка и робота производится загрузка поддонами с заготовками остальных полок накопителя путем снятия их со своих кронштейнов 2, опускания в нижнее положение загрузки и возврата на свои кронштейны.
После обработки станком заготовок с полки, находящейся на дополнительных кронштейнах 9, и во время обработки последней заготовки с этой полки производится установка данной полки на свое место в накопителе и подача следующей загруженной заготовками полки на кронштейн 9 для обеспечения непрерывной работы стглка.
L
По мере накопления полок с обработанными заготовками они одновре- менно с работой станка или другого
технологического оборудования могут быть поданы захватами в нижнее положение для разгрузки с целью передачи поддонов с обработанными заготовками на другие технологические позиции. При этом освободившаяся полка может быть снова загружена поддонами с необработанными
заготовками или сменным инструментом и оснасткой для станка, которые при последующей установке этой полки на дополнительные кронштейны в зоне действия схвата робота могут быть
установлены на станок взамен отслуживших свой срок инструментов или для проведения других переходов по обработке заготовок.
Формула изобретения
Механизированный многоярусный накопитель, содержащий корпус с боковыми и задней стенками, установленные на закрепленных в корпусе несущих кронштейнах съемные полки и связанные с приводом вертикального перемещения каретки, размещенные в корпусе с боковых сторон полок и
имеющие выдвижные захваты для взаимодействия с полками с их боковых сторон для перемещения их за пределы корпуса с его передней стороны, отличающийся тем, что, с целью улучшения эксплуатационных характеристик путем обеспечения возможности использования в составе технологического оборудования автоматизированных линий, он снабжен
манипулятором, установленным на закрепленной на корпусе со стороны его задней стенки горизонтальной направляющей, при этом в зоне одних из несущих кронштейнов, в задней
стенке корпуса выполнен проем для захода схвата манипулятора и размещения его над расположенной на упомянутых кронштейнах съемной полки для взаимодействия с размешенными на
ней изделиями.
ЪР Csl
у у
1.
X)
J ас
о
0
а
«
JL
W Ф t Ф $ $
$
Л - f м
$ 5
Ф
,
Ф
6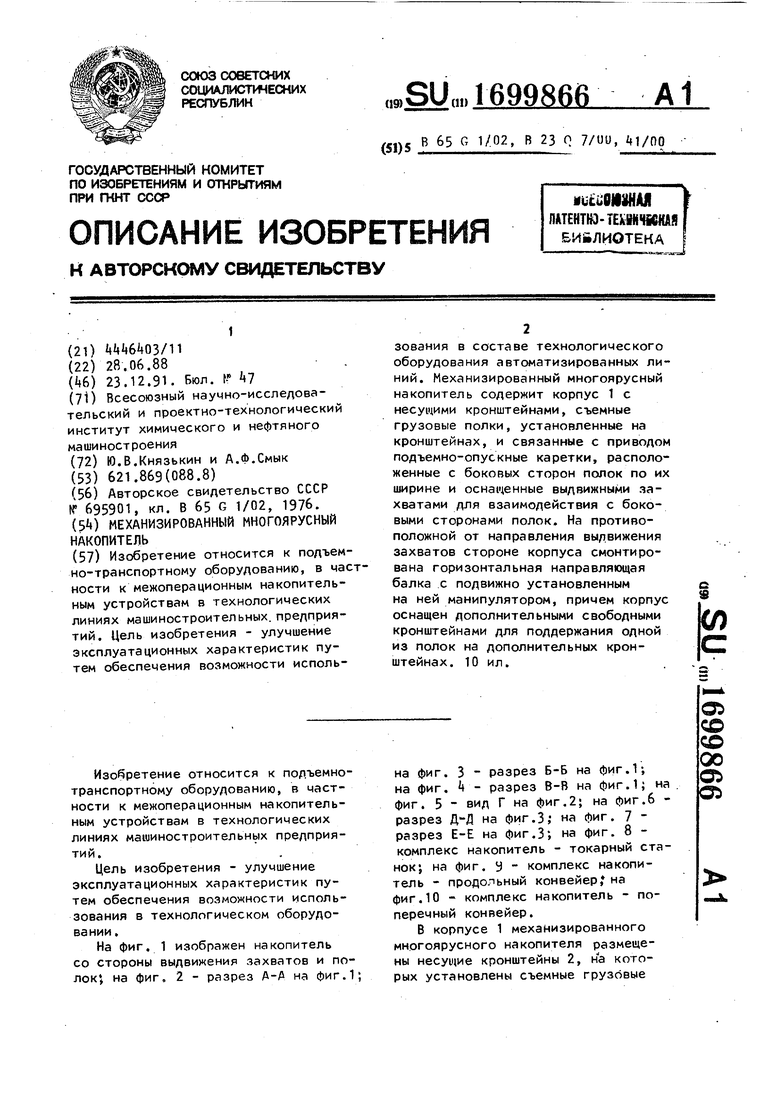
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизированный многоярусный стеллаж | 1982 |
|
SU1024392A1 |
| МЕХАНИЗИРОВАННЫЙ МНОГОЯРУСНЫЙ НАКОПИТЕЛЬ | 1990 |
|
RU2029710C1 |
| Шарнирно-рычажной механизм | 1989 |
|
SU1721339A1 |
| Механизированный многоярусный стеллаж | 1977 |
|
SU701872A1 |
| Механизированный стеллаж | 1982 |
|
SU1022875A1 |
| Робототехнологический комплекс | 1985 |
|
SU1289677A1 |
| Автоматическая линия | 1984 |
|
SU1187962A1 |
| Автоматическая линия для механической обработки цилиндрических деталей | 1983 |
|
SU1135607A1 |
| СПОСОБ ПАРКОВКИ АВТОМОБИЛЕЙ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ, МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА С ХРАНЕНИЕМ АВТОМОБИЛЕЙ НА ПОДДОНАХ, ПРИЁМНО-ПОВОРОТНЫЙ МЕХАНИЗМ ДЛЯ МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКИ С ПОДЪЁМНОЙ КЛЕТЬЮ, КЛЕТЬ ДЛЯ ТРАНСПОРТИРОВКИ ПОДДОНА ВНУТРИ МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКИ, МЕХАНИЗМ СИНХРОННОГО ГОРИЗОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩИХ КАРЕТОК КЛЕТИ, АВТОМОБИЛЬНЫЙ ПОДДОН | 2002 |
|
RU2208113C1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
Изобретение относится к подъемно-транспортному оборудованию, в частности к межоперационным накопительным устройствам в технологических линиях машиностроительных, предприятий. Цель изобретения - улучшение эксплуатационных характеристик путем обеспечения возможности использования в составе технологического оборудования автоматизированных линий. Механизированный многоярусный накопитель содержит корпус 1 с несущими кронштейнами, съемные грузовые полки, установленные на кронштейнах, и связанные с приводом подъемно-опускные каретки, расположенные с боковых сторон полок по их ширине и оснащенные выдвижными захватами для взаимодействия с боковыми сторонами полок. На противоположной от направления выдвижения захватов стороне корпуса смонтирована горизонтальная направляющая балка с подвижно установленным на ней манипулятором, причем корпус оснащен дополнительными свободными кронштейнами для поддержания одной из полок на дополнительных кронштейнах. 10 ил. с $ Кя
NSfcv NS 4J NSX NS54 N§
13 47J
Фиг. 2
T4 11.
13 47J
Фиг. 2
61
Ј Щ М
N& ЧчЧ У v Ч Ч
Г
Ы 91 д- д
ft
/
Я
9986691
Ь Мф TZv. ч
9986691
Вив Г
s ч х Ж N$ ч ч % ч
Фиг.5
61
ь
лК/
/ а п
tz
Г-/
ЧЯ86691
ю
Фие.8
QL
9996691
v
ю
Фиг. Ю
| Механизированный многоярусный стеллаж | 1976 |
|
SU695901A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| ( МЕХАНИЗИРОВАННЫЙ МНОГОЯРУСНЫЙ НАКОПИТЕЛЬ | |||
