Изобретение относится к области абразивной обработки и может быть использовано для взаимной автоматизированной притирки сферических поверхностей деталей шарового шарнира непосредственно в месте их установки в основном изделии.
Известно устройство для взаимной автоматизированной притирки сферических поверхностей, содержащее станину со смонтированными на ней блоком управления и колонной, на которой закреплена консоль с системой приводов главных движений, которая соединяется посредством муфты с притираемым шаровым шарниром, смонтированным на установочном столе, к которому присоединены система оказания давления и система подачи притирочной смеси (патент RU 2797803 C1, опубл. 08.06.2023г.).
Недостатком данного устройства является возможность притирки деталей шаровых шарниров с вертикальной ориентацией отверстия в шаровом шарнире, а также невозможность осуществления процесса взаимной притирки деталей шаровых шарниров непосредственно в месте их установки в основном изделии, так как в нем отсутствуют компоненты для мобильного монтажа устройства.
Наиболее близким по технической сущности к предлагаемому изобретению является выбранное в качестве прототипа устройство для взаимной автоматизированной притирки сферических поверхностей, содержащее станину со смонтированными на ней блоком управления и системой приводов главных движений, состоящей из программно-управляемой пятиосевой роботизированной руки с приводом собственного вращения, которая соединяется посредством муфты с притираемым шаровым шарниром, смонтированным на установочном столе, к которому присоединены система оказания давления и система подачи притирочной смеси (патент RU 2797801 C1, опубл. 08.06.2023г.).
Недостатком данного устройства, в том числе технической проблемой, является невозможность осуществления процесса взаимной притирки деталей шаровых шарниров непосредственно в месте их установки в основном изделии, так как в нем отсутствуют компоненты для мобильного монтажа устройства.
В основу заявленного изобретения был положен технический результат - обеспечение мобильности притирочного станка за счет использования регулируемой платформы в составе станка, позволяющей осуществить притирку деталей шаровых шарниров непосредственно в месте их установки в основном изделии.
Технический результат достигается тем, что мобильный станок для взаимной автоматизированной притирки деталей шарового шарнира содержит станину со смонтированными на ней блоком управления и системой приводов главных движений, состоящей из программно-управляемой пятиосевой роботизированной руки с приводом собственного вращения, которая соединена посредством муфты с притираемым шаровым шарниром, смонтированным в корпусе основного изделия, к которому прикреплены система оказания давления и система подачи притирочной смеси, и имеет также регулируемую по одной линейной и двум угловым координатам платформу, которая предназначена для мобильного монтажа станка в заданном положении с целью притирки деталей шаровых шарниров непосредственно в месте их установки в основном изделии, при этом платформа состоит из основания с тремя сферическими кинематическими парами, к которым прикреплены телескопические стойки, обладающие возможностью регулировки и фиксации по длине, на концах которых закреплены посредством вращательных кинематических пар магнитные блоки, предназначенные для монтажа мобильного станка на корпусе основного изделия.
Таким образом, благодаря использованию регулируемой платформы мобильный станок позволяет осуществить притирку деталей шаровых шарниров непосредственно в месте их установки в основном изделии.
Изобретение поясняется графическим изображением.
На фиг. 1 представлен общий вид мобильного станка в условиях притирки деталей шарового шарнира непосредственно в месте их установки в основном изделии.
Мобильный станок для взаимной автоматизированной притирки деталей шарового шарнира содержит станину 1, на которой смонтированы блок управления 2 и система приводов главных движений 3. При этом система приводов главных движений 3 состоит из программно-управляемой пятиосевой роботизированной руки 4 и привода собственного вращения 5 и соединяется посредством муфты 6 с притираемым шаровым шарниром 7, который смонтирован в корпусе 8 основного изделия. К корпусу 8 основного изделия прикреплены система оказания давления 9 и система подачи притирочной смеси 10. Также станок снабжен регулируемой по одной линейной и двум угловым координатам платформой 11, предназначенной для мобильного монтажа станка в заданном положении с целью притирки деталей шаровых шарниров непосредственно в месте их установки в основном изделии. Платформа 11 состоит из основания 12 с тремя сферическими кинематическими парами 13, к которым крепятся телескопические стойки 14, обладающие возможностью регулировки и фиксации по длине. На концах телескопических стоек 14 крепятся посредством вращательных кинематических пар 15 магнитные блоки 16, предназначенные для монтажа мобильного станка на корпусе 8 основного изделия.
Станок работает следующим образом.
Первоначально производят монтаж мобильного станка возле зоны установки шарового шарнира 7 посредством фиксации магнитных блоков 16 на корпусе 8 основного изделия таким образом, чтобы наименьший из углов треугольника, вершины которого совпадают с центрами магнитных блоков, был больше 30 градусов. Такое положение позволяет обеспечить необходимую жесткость конструкции мобильного станка. Далее регулируют пространственное положение основания 12 платформы 11 посредством изменения длины телескопических стоек 14. После достижения заданного положения мобильного станка производят фиксацию длин телескопических стоек 14. Далее соединяют привод собственного вращения 5 с шаровым шарниром 7 посредством муфты 6. Затем производят монтаж системы оказания давления 9 и системы подачи притирочной смеси 10 возле зоны установки шарового шарнира 7. Затем при помощи блока управления 2 запускают управляющую программу по притирке. Блоком управления 2 согласуется работа системы приводов главных движений 3, представленной в виде программно-управляемой пятиосевой роботизированной руки 4, обеспечивающей притирочные движения прецессии и нутации, и привода собственного вращения 5, обеспечивающего притирочное движение собственного вращения, с системой оказания давления 9 и системой подачи притирочной смеси 10. На первом этапе отработки управляющей программы системой подачи притирочной смеси 10 осуществляется подача абразивной суспензии в зону притирки. Затем система оказания давления 9 создает необходимое давление в зоне притирки. Далее мобильный станок приступает непосредственно к самой притирке, которая идет до тех пор, пока не будет достигнуто необходимое требование по моменту силы трения в шаровом шарнире 7. Момент силы трения рассчитывается по следующей формуле:
 (1)
(1)
где  - момент сил, создаваемый приводом собственного вращения 5;
- момент сил, создаваемый приводом собственного вращения 5;
 - момент инерции всех звеньев, вращаемых приводом собственного вращения 5;
- момент инерции всех звеньев, вращаемых приводом собственного вращения 5;
 - угловое ускорение, создаваемое приводом собственного вращения 5.
- угловое ускорение, создаваемое приводом собственного вращения 5.
Момент сил, создаваемый приводом собственного вращения 5, определяется по следующей формуле:
 (2)
(2)
Где  - мощность, потребляемая приводом собственного вращения 5;
- мощность, потребляемая приводом собственного вращения 5;
 - частота вращения привода собственного вращения 5.
- частота вращения привода собственного вращения 5.
После достижения требования по моменту силы трения в шаровом шарнире 7 управляющая программа блока управления 2 выдает заключение о завершении процесса притирки.
Таким образом, заявленная совокупность существенных признаков, отраженная в формуле изобретения, обеспечивает получение заявленного технического результата - обеспечение мобильности притирочного станка за счет использования регулируемой платформы в составе станка, позволяющей осуществить притирку деталей шаровых шарниров непосредственно в месте их установки в основном изделии.
Анализ заявленного технического решения на соответствие условиям патентоспособности показал, что указанные в формуле признаки являются существенными и взаимосвязаны между собой с образованием устойчивой совокупности необходимых признаков, неизвестной на дату приоритета из уровня техники и достаточной для получения требуемого технического результата.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении, при использовании заявленного технического решения, следующей совокупности условий:
- объект, воплощающий заявленное техническое решение, предназначен для взаимной автоматизированной притирки сферических поверхностей деталей шарового шарнира непосредственно в месте их установки в основном изделии за счет использования регулируемой платформы в составе станка;
- для заявленного объекта в том виде, как он охарактеризован в формуле, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных из уровня техники на дату приоритета средств и методов;
- объект, воплощающий заявленное техническое решение, при его осуществлении способен обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, по мнению заявителя, заявленный объект соответствует критериям патентоспособности «новизна», «изобретательский уровень» и «промышленная применимость» по действующему законодательству.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для взаимной автоматизированной притирки деталей шарового шарнира | 2022 |
|
RU2797801C1 |
| Станок для взаимной автоматизированной притирки деталей шарового шарнира | 2022 |
|
RU2797804C1 |
| Станок для взаимной автоматизированной притирки деталей шарового шарнира | 2022 |
|
RU2797805C1 |
| Станок для взаимной автоматизированной притирки деталей шарового шарнира | 2022 |
|
RU2797803C1 |
| Станок для совместной автоматизированной притирки деталей шарниров шаровых | 2021 |
|
RU2772527C1 |
| Установка для притирки сопрягаемых уплотнительных поверхностей диска и седла клапана обратного | 2019 |
|
RU2724232C1 |
| ВЕРТИКАЛЬНЫЙ СТАНОК ДЛЯ ПРИТИРКИ СОПРЯЖЕННЫХ КОНУСНЫХ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ | 1971 |
|
SU291777A1 |
| Устройство для установки детали на притирочном станке | 1990 |
|
SU1812051A1 |
| Станок для притирки совместно работающих шестерен | 1946 |
|
SU69319A1 |
| Станок для отделочной обработай например, притирки зубьев колес | 1945 |
|
SU85059A3 |

Изобретение относится к области абразивной обработки и может быть использовано для взаимной автоматизированной притирки сферических поверхностей деталей шарового шарнира непосредственно в месте их установки в основном изделии. Станок содержит станину со смонтированными на ней блоком управления и системой приводов главных движений, состоящей из программно-управляемой пятиосевой роботизированной руки с приводом собственного вращения, которая соединена посредством муфты с притираемым шаровым шарниром с возможностью монтирования в корпусе основного изделия и прикрепления к нему системы оказания давления и системы подачи притирочной смеси, и имеет регулируемую по одной линейной и двум угловым координатам платформу, которая состоит из основания с тремя сферическими кинематическими парами, к которым прикреплены телескопические стойки, на концах которых закреплены посредством вращательных кинематических пар магнитные блоки. Обеспечивается мобильность притирочного станка. 1 ил.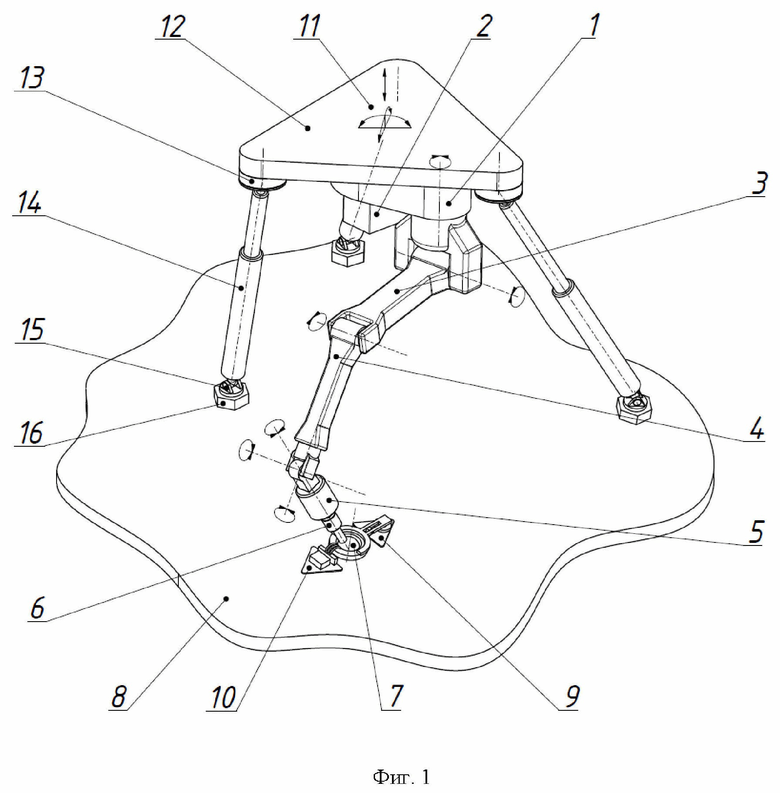
Мобильный станок для взаимной автоматизированной притирки деталей шарового шарнира, содержащий станину со смонтированными на ней блоком управления и системой приводов главных движений, состоящей из программно-управляемой пятиосевой роботизированной руки с приводом собственного вращения, которая соединена посредством муфты с притираемым шаровым шарниром c возможностью монтирования в корпусе основного изделия и прикрепления к нему системы оказания давления и системы подачи притирочной смеси, отличающийся тем, что он снабжен регулируемой по одной линейной и двум угловым координатам платформой, предназначенной для мобильного монтажа станка в заданном положении с обеспечением притирки деталей шарового шарнира непосредственно в месте его установки в основном изделии и состоящей из основания с тремя сферическими кинематическими парами, к которым прикреплены телескопические стойки, выполненные с возможностью регулировки и фиксации по длине, на концах которых закреплены посредством вращательных кинематических пар магнитные блоки, предназначенные для монтажа мобильного станка на корпусе основного изделия.
| Станок для взаимной автоматизированной притирки деталей шарового шарнира | 2022 |
|
RU2797801C1 |
| Устройство для притирки | 1972 |
|
SU441136A1 |
| Устройство для притирки сферическихпОВЕРХНОСТЕй дЕТАлЕй | 1979 |
|
SU844237A1 |
| Станок для совместной автоматизированной притирки деталей шарниров шаровых | 2021 |
|
RU2772527C1 |
| US 4023311 A1, 17.05.1977. | |||

