Изобретение относится к области робототехники для морской сейсморазведки подводных месторождений полезных ископаемых, и может быть использовано для автоматического управления группы автономных необитаемых подводных аппаратов для морских геофизических исследований, как на открытых от льда акваториях, так и покрытых льдом круглогодично или большую часть года, например, для проведения сейсморазведочных работ.
В настоящее время ведутся проработки современных методов, описания различных алгоритмов и моделей управления группами автономных необитаемых подводных аппаратов. Одним из основных классов задач, решаемых с использованием автономных необитаемых подводных аппаратов, являются обзорно-поисковые задачи. Они заключаются в покрытии некоторой площади под водой либо с целью поиска и обследования заданных объектов, либо для построения карты с нанесёнными результатами измерений. Традиционный метод решения обзорно-поисковых задач с использованием автономных необитаемых аппаратов заключается в покрытии указанной области сетью параллельных галсов. При этом миссия для аппарата представляет собой фиксированную траекторию, вводимую в систему программного управления аппарата перед погружением. В течение последних десятилетий различными организациями прилагаются усилия по разработке более эффективных и надёжных методов решения обзорно-поисковых задач. Для этого предлагаются и исследуются методы, использующие группы автономных необитаемых подводных аппаратов и адаптивное формирование траекторий движения аппаратов. Большая работа в этом направлении проделана зарубежными организациями, в России исследования по созданию более эффективных и надёжных методов решения обзорно-поисковых задач применительно к подводным аппаратам ведутся в ИПМТ ДВО РАН и других организациях. Кроме того, постоянно предлагаются новые методы для решения задач данного типа на основе групповой работы автономных необитаемых подводных аппаратов. Многие из этих методов реализуются для конкретных систем программного управления, часть из которых в течение последних десяти лет стала доступной, что приводит к их более широкому распространению, дополнительным исследованиям, разработкам моделей и алгоритмов для решения обзорно-поисковых задач на основе применения групп автономных необитаемых аппаратов (источник - диссертация «Методы решения обзорно-поисковых задач с применением групп автономных необитаемых подводных аппаратов», автор Туфанов И.Е., сайт iacp.dvo.ru/resources/fileman/Uploads/d_tufanov.pdf).
Под предлагаемую систему управления группы автономных необитаемых подводных аппаратов не найдено аналогов.
Задачей предлагаемого изобретения является достижение нового технического результата – повышение эффективности системы управления автономных необитаемых подводных аппаратов с подводным комплектом технических средств запуска/приема аппаратов, за счет автоматизации непрерывного функционирования как группы автономных необитаемых подводных аппаратов, так и комплектов технических средств запуска/приема аппаратов. Также изобретение позволит повысить точность позиционирования группы автономных необитаемых подводных аппаратов в толще воды относительно географических координат (дна) за счет использования гидроакустических маяков-ответчиков, что позволит применять изобретение в морской зоне, в том числе с ледовой обстановкой.
Поставленная задача решается тем, что система управления группы автономных необитаемых подводных аппаратов, состоящая из судна, включающего пост управления, снабженный в свою очередь по меньшей мере одним рабочим местом оператора, спутниковой навигационной системой, по меньшей мере одним модемом гидроакустической связи, датчиком измерения скорости звука в воде, а также включающего антенну гидроакустической связи, модуль сопряжения, которые связанные с снабженной системой электропитания, а также рабочее место оператора связано со спутниковой навигационной системой, модемом гидроакустической связи и датчиком измерения скорости звука в воде, а модем гидроакустической связи связан с антенной гидроакустической связи и модулем сопряжения, также состоящая из по меньшей мере одного комплекта технических средств запуска/приема аппаратов, снабженного модулем управления, по меньшей мере одним устройством запуска/приема автономного необитаемого подводного аппарата, гидроакустической системой связи, системой технического зрения, по меньшей мере одним модемом гидроакустической системы навигации, которые связанные с снабженной системой электропитания, а модуль управления в свою очередь связан с устройством запуска/приема автономного необитаемого подводного аппарата, гидроакустической системой связи, системой технического зрения, модемом гидроакустической системы навигации, также состоящая из по меньшей мере одного автономного необитаемого подводного аппарата, включающего систему управления, снабженную гидроакустической антенной, модемом гидроакустической системы связи, бортовым вычислителем, модулем управления полезной нагрузкой, контрольно-аварийной системой, навигационной системой, в свою очередь снабженной бортовой навигационной системой, которая связанна с снабженной гидроакустической навигационной системой, системой электропитания, в свою очередь снабженной по меньшей мере одним преобразователем напряжения, бортовым источником питания, модулем контроля параметров системы электропитания, где преобразователь напряжения, связан с бортовым источником питания, а он в свою очередь связан с модулем контроля параметров системы электропитания, также система управления, включает систему управления движителями, снабженную микроконтроллером, где гидроакустическая антенна связана с модем гидроакустической системы связи, а бортовой вычислитель связан с микроконтроллером, модемом гидроакустической системы связи, навигационной системой, модулем управления полезной нагрузкой, контрольно-аварийной системой, а микроконтроллер связан с контрольно-аварийной системой и модулем контроля параметров системы электропитания, а также система электропитания связанная с гидроакустической антенной, системой управления движителями, модемом гидроакустической системы связи, бортовым вычислителем, навигационной системой, модулем управления полезной нагрузкой и контрольно-аварийной системой, а также автономный необитаемый подводный аппарат включает движительно-рулевой аппарат, в свою очередь снабженный маршевым движителем, по меньшей мере одним подруливающим движителем и по меньшей мере одним сервоприводом поворота маршевого двигателя, и еще автономный необитаемый подводный аппарат включает оборудование системы технического зрения, оборудование системы геофизических исследований, электромагнит сброса аварийного балласта, где микроконтроллер также связан с движительно-рулевым аппаратом и электромагнитом сброса аварийного балласта, а бортовой вычислитель также связан с оборудованием системы технического зрения, а модуль управления полезной нагрузкой также связан с оборудованием системы геофизических исследований, а система электропитания также связанна с маршевым движителем, подруливающим движителем, сервоприводом поворота маршевого двигателя, оборудованием системы технического зрения, оборудованием системы геофизических исследований и электромагнитом сброса аварийного балласта, также система управления группы автономных необитаемых подводных аппаратов состоит из по меньшей мере одного гидроакустического маяка-ответчика связанного по гидроакустическому каналу с навигационной системой автономного необитаемого подводного аппарата и с модемом гидроакустической системы навигации комплекта технических средств запуска/приема аппаратов, причем антенна гидроакустической связи судна связана по гидроакустическому каналу с гидроакустической антенной автономного необитаемого подводного аппарата, а также связана с гидроакустической системой связи комплекта технических средств запуска/приема аппаратов, а модуль сопряжения связан по гидроакустическому каналу с модулем управления комплекта технических средств запуска/приема аппаратов, причем гидроакустическая система связи комплекта технических средств запуска/приема аппаратов связана по гидроакустическому каналу с гидроакустической антенной автономного необитаемого подводного аппарата.
Сущность заявляемой системы управления группы автономных необитаемых подводных аппаратов поясняется схемами, где:
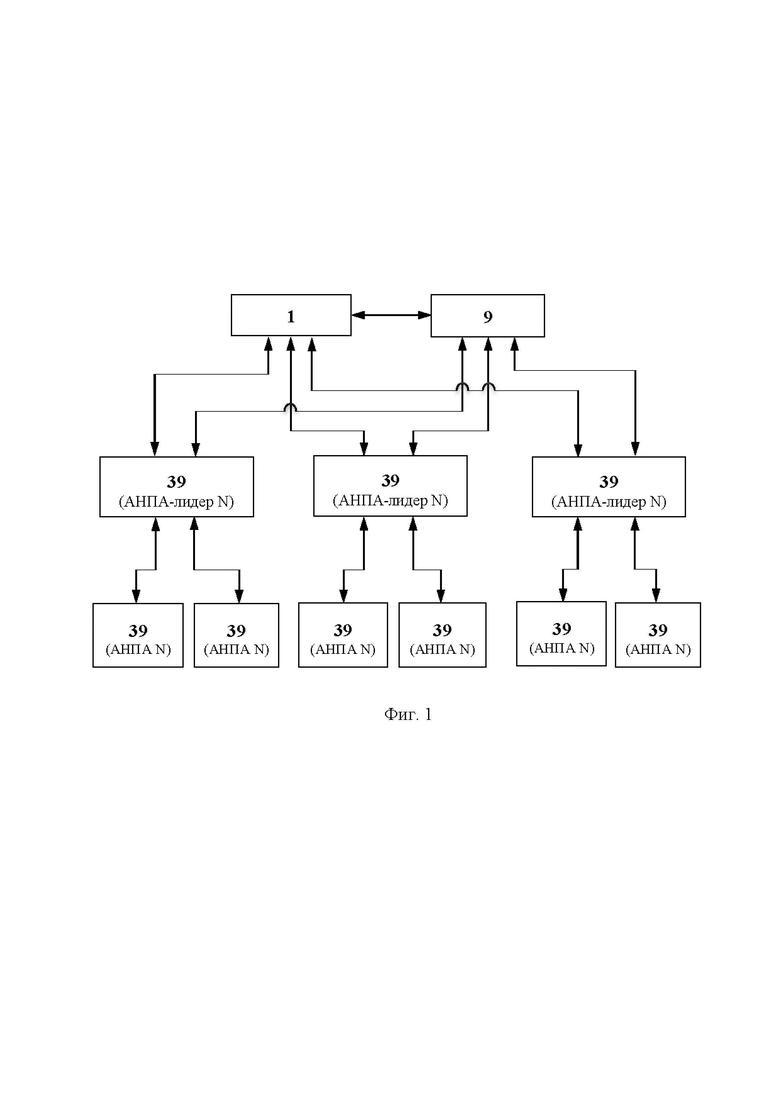
- на фиг.1 изображена схема системы управления комплексом, обеспечивающая управление группы автономных необитаемых подводных аппаратов демонстрирующая взаимосвязи передачи данных по каналам гидроакустической связи в зависимости от выполнения функций автономных необитаемых подводных аппаратов лидера или ведомого, при построении группы;
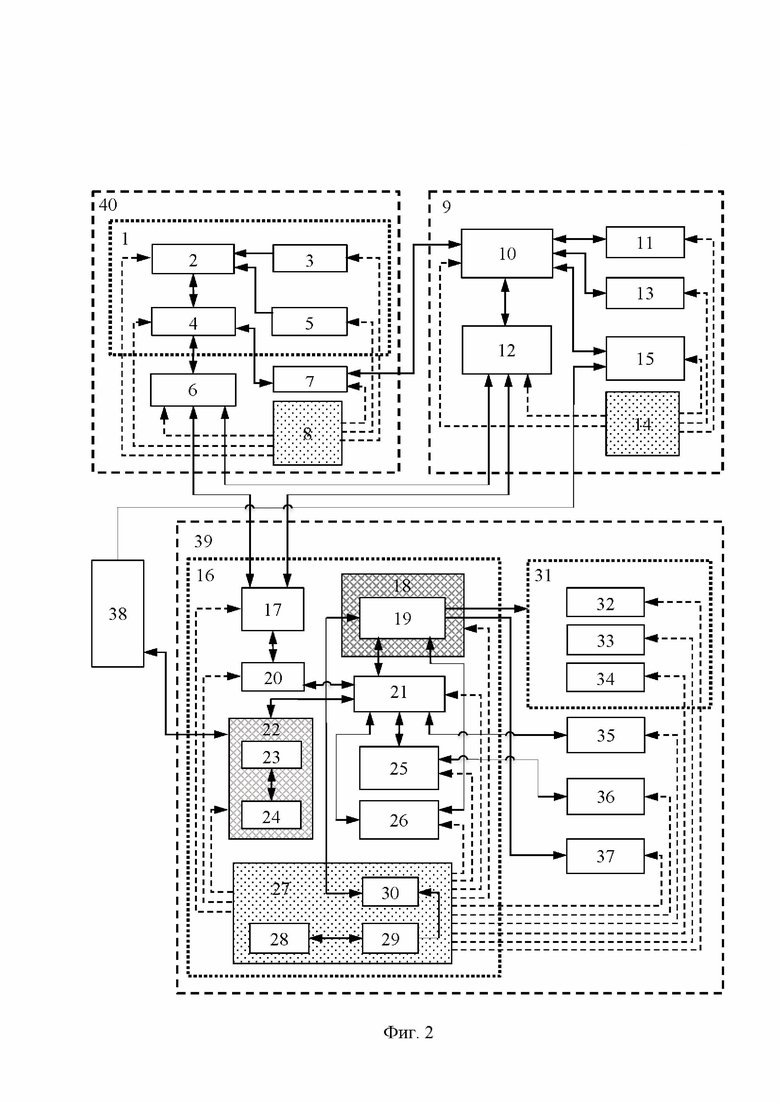
- на фиг.2 изображена структурная схема системы управления группы автономных необитаемых подводных аппаратов с взаимосвязями элементов системы обеспечивающими управление группы автономных необитаемых подводных аппаратов.
Система управления группы автономных необитаемых подводных аппаратов, состоящая из судна 40, включающего пост управления 1, снабженный в свою очередь по меньшей мере одним рабочим местом оператора 2, спутниковой навигационной системой 3, по меньшей мере одним модемом гидроакустической связи 4, датчиком измерения скорости звука в воде 5, а также включающего антенну гидроакустической связи 6, модуль сопряжения 7, которые связанные с снабженной системой электропитания 8, а также рабочее место оператора 2 связано со спутниковой навигационной системой 3, модемом гидроакустической связи 4 и датчиком измерения скорости звука в воде 5, а модем гидроакустической связи 4 связан с антенной гидроакустической связи 6 и модулем сопряжения 7.
Также состоящая из по меньшей мере одного комплекта технических средств запуска/приема аппаратов 9, снабженного модулем управления 10, по меньшей мере одним устройством запуска/приема автономного необитаемого подводного аппарата 11, гидроакустической системой связи 12, системой технического зрения 13, по меньшей мере одним модемом гидроакустической системы навигации 15, которые связанные с снабженной системой электропитания 14. А модуль управления 10 в свою очередь связан с устройством запуска/приема автономного необитаемого подводного аппарата 11, гидроакустической системой связи 12, системой технического зрения 13, модемом гидроакустической системы навигации 15.
Также состоящая из по меньшей мере одного автономного необитаемого подводного аппарата 39, включающего систему управления 16, снабженную гидроакустической антенной 17, модемом гидроакустической системы связи 20, бортовым вычислителем 21, модулем управления полезной нагрузкой 25, контрольно-аварийной системой 26, навигационной системой 22, в свою очередь снабженной бортовой навигационной системой 23 которая связанна с снабженной гидроакустической навигационной системой 24, системой электропитания 27, в свою очередь снабженной по меньшей мере одним преобразователем напряжения 28, бортовым источником питания 29, модулем контроля параметров системы электропитания 30, где преобразователь напряжения 28, связан с бортовым источником питания 29, а он в свою очередь связан с модулем контроля параметров системы электропитания 30. Также система управления 16, включает систему управления движителями 18, снабженную микроконтроллером 19, где гидроакустическая антенна 17 связана с модем гидроакустической системы связи 20, а бортовой вычислитель 21 связан с микроконтроллером 19, модемом гидроакустической системы связи 20, навигационной системой 22, модулем управления полезной нагрузкой 25, контрольно-аварийной системой 26. А микроконтроллер 19 связан с контрольно-аварийной системой 26 и модулем контроля параметров системы электропитания 30. А также система электропитания 27 связанная с гидроакустической антенной 17, системой управления движителями 18, модемом гидроакустической системы связи 20, бортовым вычислителем 21, навигационной системой 22, модулем управления полезной нагрузкой 25 и контрольно-аварийной системой 26.
А также автономный необитаемый подводный аппарат 39 включает движительно-рулевой аппарат 31, в свою очередь снабженный маршевым движителем 32, по меньшей мере одним подруливающим движителем 33 и по меньшей мере одним сервоприводом поворота маршевого двигателя 34, и еще автономный необитаемый подводный аппарат 39 включает оборудование системы технического зрения 35, оборудование системы геофизических исследований 36, электромагнит сброса аварийного балласта 37. Где микроконтроллер 19 также связан с движительно-рулевым аппаратом 31 и электромагнитом сброса аварийного балласта 37, а бортовой вычислитель 21 также связан с оборудованием системы технического зрения 35, а модуль управления полезной нагрузкой 25 также связан с оборудованием системы геофизических исследований 36. А система электропитания 27 также связанна с маршевым движителем 32, подруливающим движителем 33, сервоприводом поворота маршевого двигателя 34, оборудованием системы технического зрения 35, оборудованием системы геофизических исследований 36 и электромагнитом сброса аварийного балласта 37.
Также система управления группы автономных необитаемых подводных аппаратов состоит из по меньшей мере одного гидроакустического маяка-ответчика 38 связанного по гидроакустическому каналу с навигационной системой 22 автономного необитаемого подводного аппарата 39 и с модемом гидроакустической системы навигации 15 комплекта технических средств запуска/приема аппаратов 9.
Причем антенна гидроакустической связи 6 судна 40 связана по гидроакустическому каналу с гидроакустической антенной 17 автономного необитаемого подводного аппарата 39, а также связана с гидроакустической системой связи 12 комплекта технических средств запуска/приема аппаратов 9. А модуль сопряжения 7 связан по гидроакустическому каналу с модулем управления 10 комплекта технических средств запуска/приема аппаратов 9.
Причем гидроакустическая система связи 12 комплекта технических средств запуска/приема аппаратов 9 связана по гидроакустическому каналу с гидроакустической антенной 17 автономного необитаемого подводного аппарата 39.
Работа системы управления группы автономных необитаемых подводных аппаратов происходит следующим образом:
Определяют район морских геофизических исследований, также определяют необходимое количество автономных необитаемых подводных аппаратов 39 необходимых для проведения геофизических миссий в исследуемом районе. На посту управления 1 судна 40 с рабочего места оператора 2 формируют необходимое количество миссий в заданном районе геофизических исследований, определяют маршрутные задания и закладывают параметры построения группы (мисси) автономных необитаемых подводных аппаратов 39 с заданием автономным необитаемым подводным аппаратам 39 требуемого шага построения и формации группы, в плоские фигуры или объемные. Также на посту управления 1 с рабочего места оператора 2 закладывают параметры морской среды района морских геофизических исследований в которой планирует проведение миссий. Загрузка судна 40 постом управления 1, необходимым количеством комплектов технических средств запуска/приема аппаратов 9 с необходимым количеством автономных необитаемых подводных аппаратов 39, а также необходимым количеством гидроакустических маяков-ответчиков 38, в зависимости от заданных миссии осуществляют в месте базирования судна 40 с дальнейшим переходом судна 40 в район морских геофизических исследований.
При достижении судном 40 района морских геофизических исследований, с судна 40 устанавливают гидроакустические маяки-ответчики 38, для точного позиционирования автономных необитаемых подводных аппаратов 39 при выполнении ими заданных миссий.
Работа системы управления группы автономных необитаемых подводных аппаратов в целом происходит следующим образом. С судна 40 спускают комплект технических средств запуска/приема аппаратов 9 с загруженными в него автономными необитаемыми подводными аппаратами 39 в подводное положение. Спуск комплекта технических средств запуска/приема аппаратов 9 осуществляют в режиме, без хода судна 40.
Далее с поста управления 1 с рабочего места оператора 2 (фиг.2) оператор осуществляет корректировку и проверку (при необходимости) заложенных миссий группы автономных необитаемых подводных аппаратов 39, также оператор получив данные со спутниковой навигационной системы 3 осуществляет корректировку местоположения (географические координаты) судна 40 и комплекта технических средств запуска/приема аппаратов 9. Дополнительно (при необходимости) оператор получив данные с датчика скорости измерения звука 5 проводит корректировку параметров морской среды района морских геофизических исследований, а также проводит диагностику элементов системы управления группы автономных необитаемых подводных аппаратов. Также оператор получает данные о географических координатах (и вводит поправки в систему управления группы автономных необитаемых подводных аппаратов, при необходимости) по гидроакустическому каналу с гидроакустических маяков-ответчиков 38, через модем гидроакустической связи 4, антенну гидроакустической связи 6 и гидроакустическую систему связи 12, получая данные через модуль управления 10 с модема гидроакустической системы навигации 15 комплекта технических средств запуска/приема аппаратов 9. Данные миссии с рабочего места оператора 2 по каналу гидроакустической связи передаются на комплект технических средств запуска/приема аппаратов 9 для загрузки данных в автономные необитаемые подводные аппараты 39. Также оператор через модем гидроакустической связи 4 и модуль сопряжения 7 через модуль управления 10 проводит диагностику элементов комплекта технических средств запуска/приема аппаратов 9.
Оператор проверив все параметры заложенной мисси осуществляет ее запуск с рабочего места оператора 2. Далее в автоматическом режиме осуществляют выполнение мисси, которая включает отработку всех элементов системы управления группы автономных необитаемых подводных аппаратов, задействованных в конкретной миссии.
Командный информационный сигнал о начале выполнения мисси поступает с рабочего места оператора 2 по гидроакустической связи через модем гидроакустической связи 4 и антенну гидроакустической связи 6 в гидроакустическую систему связи 12 комплекта технических средств запуска/приема аппаратов 9 для обработки в модуле управления 10, а также через модем гидроакустической связи 4 и антенну гидроакустической связи 6 в гидроакустическую антенну 17 и модем гидроакустической системы связи 20 автономного необитаемого подводного аппарата 39 для обработки в бортовом вычислителе 21.
После получения команды комплект технических средств запуска/приема аппаратов 9 в автоматическом режиме осуществляет выпуск автономных необитаемых подводных аппаратов 39. Модуль управления 10 выдает команду устройству запуска/приема автономных необитаемых подводных аппаратов 11 о выпуске автономных необитаемых подводных аппаратов 39 с очередностью заданной миссией.
После выхода в автоматическом режиме из комплекта технических средств запуска/приема аппаратов 9 автономных необитаемых подводных аппаратов 39, группа аппаратов формирует строй (фиг.1), в зависимости от заложенной в них мисси, причем автономные необитаемые подводные аппараты 39 реализованы с возможностью выполнения функций как лидера, так и ведомого, они формируют строй с различными шагами построения, как плоских фигур, так и в объемных формаций.
Навигационная система 22, включающая бортовую навигационную систему 23 и гидроакустическую навигационную систему 24, обеспечивает навигационной информацией систему управления 16, посредством постоянного обмена информацией по гидроакустическому каналу связи с гидроакустическими маяками-ответчиками 38, для позиционирования автономных необитаемых подводных аппаратов 39 по целевой траектории движения исходя из заданной миссии.
Сформированный строй из группы автономных необитаемых подводных аппаратов 39 в соответствии с заложенной миссией выполняет по заданной траектории движения (с галсами, если заложено миссией) обход района морских геофизических исследований.
С целью движения автономного необитаемого подводного аппарата 39 его (позиционирования) по целевой траектории мисси бортовой вычислитель 21 передает команды микроконтроллеру 19 системы управления движителями 18 который управляет движителями движительно-рулевого аппарата 31 (маршевым движителем 32 и подруливающим движителем 33), а также сервоприводами поворота маршевого двигателя 34.
В соответствии с миссией геофизических исследований бортовой вычислитель 21 передает команду в модуль управления полезной нагрузкой 25, который обеспечивает работу оборудования системы геофизических исследований 36.
Бортовой вычислитель 21 выполняет основную роль в управлении автономным необитаемым подводным аппаратом 39. Он программно реализует алгоритмы группового управления автономными необитаемыми подводными аппаратами 39, и при выполнении миссии взаимодействует со всеми бортовыми элементами автономного необитаемого подводного аппарата 39, а также с комплектом технических средств запуска/приема аппаратов 9 и постом управления 1, через модем гидроакустической системы связи 20 и гидроакустической антенны 17.
По завершении выполнения миссии автономные необитаемые подводные аппараты 39 идут по целевой траектории мисси в зону действия системы технического зрения 13 комплекта технических средств запуска/приема аппаратов 9. Для высокоточного позиционирования, оборудование системы технического зрения 35 автономного необитаемого подводного аппарата 39 корректирует траекторию его движения для входа в устройство запуска/приема автономных необитаемых подводных аппаратов 11, по данным системы технического зрения 13. Система управления 16 осуществляет постоянный обмен данными по гидроакустическому каналу связи через модем гидроакустической системы связи 20 и гидроакустическую антенну 17 с модулем управления 10 через гидроакустическую систему связи 12 о соответствии истинного положения и целевой траектории входа автономного необитаемого подводного аппарата 39 и относительно линии входа в устройство запуска/приема автономных необитаемых подводных аппаратов 11. Бортовой вычислитель 21 выдает соответствующие команды микроконтроллеру 19 системы управления движителями 18, который управляет движителями движительно-рулевого аппарата 31, для корректировки курса и выравнивания истинного положения автономного необитаемого подводного аппарата 39 к целевой траектории входа в устройство запуска/приема автономных необитаемых подводных аппаратов 11.
Порядок входа группы автономных необитаемых подводных аппаратов 39 в устройства запуска/приема автономных необитаемых подводных аппаратов 11 комплекта технических средств запуска/приема аппаратов 9 заложен в миссии.
После приема автономных необитаемых подводных аппаратов 39 в комплект технических средств запуска/приема аппаратов 9, осуществляют подъем комплекта технических средств запуска/приема аппаратов 9 на судно 40 с последующим считыванием информации о проведенной миссии, как с систем управления 16 автономных необитаемых подводных аппаратов 39, так и с модулей управления 10 комплектов технических средств запуска/приема аппаратов 9 с проведением их диагностики.
Также на автономных необитаемых подводных аппаратах 39 в случае внештатных ситуаций действует контрольно-аварийная система 26, которая выполняет диагностику всех элементов системы управления 16 автономного необитаемого подводного аппарата 39 и отработку внештатных ситуаций, возникающих в процессе выполнения миссии автономного необитаемого подводного аппарата 39, и при необходимости выдает сигнал на микроконтроллер 19 системы управления движителями 18 для остановки движения автономного необитаемого подводного аппарата 39, а также подает сигнал в бортовой вычислитель 21, для принятия им решения о необходимости подачи сигнала через микроконтроллер 19 на электромагнит сброса аварийного балласта(37) и всплытия автономного необитаемого подводного аппарата 39.
Также система управления группы автономных необитаемых подводных аппаратов осуществляет автоматический контроль системы электропитания 27, обеспечивающей электропитанием все бортовое оборудование автономного необитаемого подводного аппарата 39 за счет бортового вычислителя 21 получающего данные о параметрах бортового источника питания 29 через модуль контроля параметров системы электропитания 30 в микроконтроллер 19. При перерасходе (просадке) бортового источника питания 29 автономного необитаемого подводного аппарата 39, система управления группы автономных необитаемых подводных аппаратов в автоматическом режиме выполняет оценку времени и возможность возвращения автономного необитаемого подводного аппарата 39 с входом в устройство запуска/приема автономных необитаемых подводных аппаратов 11, и при невозможности возвращения автономного необитаемого подводного аппарата 39 автоматически выдает команду в контрольно-аварийную систему 26 с поста управления 2 для последующего всплытия аппарата.
Работу системы управления группы автономных необитаемых подводных аппаратов в целом, на судне 40 обеспечивает система электропитания 8, в комплекте технических средств запуска/приема аппаратов 9 система электропитания 14.
В процессе формирования строя группой автономных необитаемых подводных аппаратов, система управления группы автономных необитаемых подводных аппаратов осуществляет автоматически назначение автономных необитаемых подводных аппаратов лидерами в группе, в зависимости от конфигурации строя всех автономных необитаемых подводных аппаратов, от их шагов построения, а также от дальности действия оборудования гидроакустической системы связи устанавливаемого на автономных необитаемых подводных аппаратах 39. Формирование и удержание строя автономных необитаемых подводных аппаратов 39 происходит путем постоянного обмена данных по каналу гидроакустической связи между группами автономных необитаемых подводных аппаратов 39 лидеров и между группами автономных необитаемых подводных аппаратов 39 ведомых во главе своих автономных необитаемых подводных аппаратов 39 лидеров.
Автономные необитаемые подводные аппараты 39 лидеры создают координатные точки, которые передают, и их отслеживают системы управления 16 остальных автономных необитаемых подводных аппаратов 39 ведомых. При выпадении из группы автономного необитаемого подводного аппарата 39 лидера, выполнение его функций автоматически назначают оптимальному рядом находящему автономному необитаемому подводному аппарату 39 ведомому, который становится лидером. Так же при осуществлении маневров, при заходе на галс группы автономных необитаемых подводных аппаратов, для поддержания строя, шагов построения, заданных миссией, например, на внешнем диаметре галса группы, автоматически может меняться назначение автономного необитаемого подводного аппарата 39, ведомый или лидер, в зависимости от дальности действия их гидроакустической связи. Такое построение группы автономных необитаемых подводных аппаратов с возможностью автоматического изменения автономным необитаемым подводным аппаратам 39 функции лидер или ведомый, может включать до тысячи единиц автономных необитаемых подводных аппаратов в группе.
Предлагаемое изобретение повышает эффективность системы управления автономных необитаемых подводных аппаратов с подводным комплексом запуска/приема аппаратов, за счет автоматизации непрерывного функционирования как группы автономных необитаемых подводных аппаратов, так и комплекта технических средств запуска/приема аппаратов. Также изобретение позволит повысить точность позиционирования группы автономных необитаемых подводных аппаратов в толще воды относительно географических координат (дна) за счет использования гидроакустических маяков-ответчиков, что позволит применять изобретение в морской зоне, в том числе с ледовой обстановкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигационной поддержки группы специализированных подводных аппаратов, выполняющих общую миссию в мелководной акватории | 2023 |
|
RU2819199C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| Система мониторинга технического состояния подводного добычного комплекса | 2021 |
|
RU2774662C1 |
| Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата | 2018 |
|
RU2689281C1 |
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход | 2018 |
|
RU2687844C1 |
| Способ позиционирования автономного подводного аппарата в глубоком море | 2022 |
|
RU2792922C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
Использование: изобретение относится к области робототехники для морской сейсморазведки подводных месторождений полезных ископаемых, и может быть использовано для автоматического управления группы автономных необитаемых подводных аппаратов для морских геофизических исследований. Сущность: система управления группы автономных необитаемых подводных аппаратов, состоящая из судна, включающего пост управления, комплектов технических средств запуска/приема аппаратов, автономных необитаемых подводных аппаратов, гидроакустических маяков-ответчиков обеспечивает закладку и выполнение миссий геофизических исследований как на открытых от льда акваториях, так и покрытых льдом круглогодично или большую часть года. Формирование миссий с маршрутными заданиями и параметрами построения группы автономных необитаемых подводных аппаратов осуществляется на посту управления. Выполнение миссий группой автономных необитаемых подводных аппаратов осуществляется в полностью автоматическом режиме и начинается с выхода группы из комплектов технических средств запуска/приема аппаратов, далее прохождение целевой траектории миссии в районе геофизических исследований, после прием группы автономных необитаемых подводных аппаратов в комплект технических средств запуска/приема аппаратов. В процессе формирования строя группой автономных необитаемых подводных аппаратов, система управления группы автономных необитаемых подводных аппаратов осуществляет автоматически назначение автономных необитаемых подводных аппаратов лидерами в группе, в зависимости от конфигурации строя. Для высокоточного позиционирования группы район геофизических исследований оснащается гидроакустическими маяками-ответчиками. Технический результат: повышение эффективности системы управления автономных необитаемых подводных аппаратов с подводным комплектом технических средств запуска/приема аппаратов и повышение точности позиционирования группы автономных необитаемых подводных аппаратов в толще воды. 2 ил.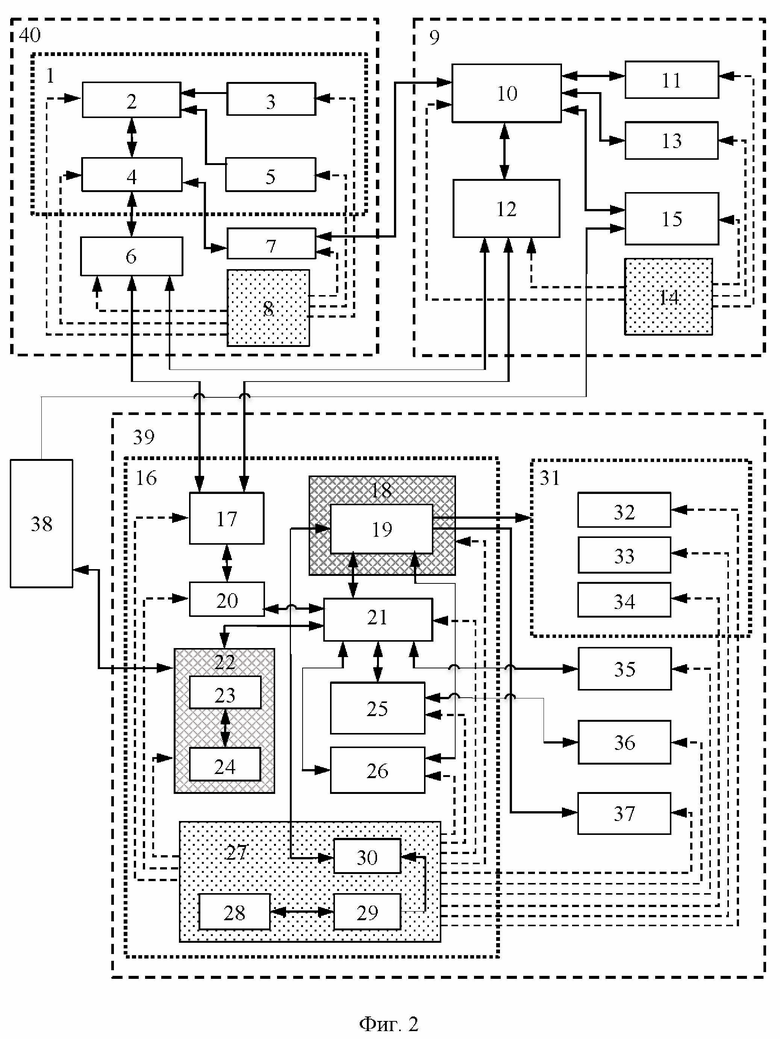
Система управления группы автономных необитаемых подводных аппаратов, состоящая из судна, включающего пост управления, снабженный в свою очередь по меньшей мере одним рабочим местом оператора, спутниковой навигационной системой, по меньшей мере одним модемом гидроакустической связи, датчиком измерения скорости звука в воде, а также включающего антенну гидроакустической связи, модуль сопряжения, которые связанные с снабженной системой электропитания, а также рабочее место оператора связано со спутниковой навигационной системой, модемом гидроакустической связи и датчиком измерения скорости звука в воде, а модем гидроакустической связи связан с антенной гидроакустической связи и модулем сопряжения, также состоящая из по меньшей мере одного комплекта технических средств запуска/приема аппаратов, снабженного модулем управления, по меньшей мере одним устройством запуска/приема автономного необитаемого подводного аппарата, гидроакустической системой связи, системой технического зрения, по меньшей мере одним модемом гидроакустической системы навигации, которые связанные с снабженной системой электропитания, а модуль управления в свою очередь связан с устройством запуска/приема автономного необитаемого подводного аппарата, гидроакустической системой связи, системой технического зрения, модемом гидроакустической системы навигации, также состоящая из по меньшей мере одного автономного необитаемого подводного аппарата, включающего систему управления, снабженную гидроакустической антенной, модемом гидроакустической системы связи, бортовым вычислителем, модулем управления полезной нагрузкой, контрольно-аварийной системой, навигационной системой, в свою очередь снабженной бортовой навигационной системой, которая связанна с снабженной гидроакустической навигационной системой, системой электропитания, в свою очередь снабженной по меньшей мере одним преобразователем напряжения, бортовым источником питания, модулем контроля параметров системы электропитания, где преобразователь напряжения, связан с бортовым источником питания, а он в свою очередь связан с модулем контроля параметров системы электропитания, также система управления, включает систему управления движителями, снабженную микроконтроллером, где гидроакустическая антенна связана с модем гидроакустической системы связи, а бортовой вычислитель связан с микроконтроллером, модемом гидроакустической системы связи, навигационной системой, модулем управления полезной нагрузкой, контрольно-аварийной системой, а микроконтроллер связан с контрольно-аварийной системой и модулем контроля параметров системы электропитания, а также система электропитания связанная с гидроакустической антенной, системой управления движителями, модемом гидроакустической системы связи, бортовым вычислителем, навигационной системой, модулем управления полезной нагрузкой и контрольно-аварийной системой, а также автономный необитаемый подводный аппарат включает движительно-рулевой аппарат, в свою очередь снабженный маршевым движителем, по меньшей мере одним подруливающим движителем и по меньшей мере одним сервоприводом поворота маршевого двигателя, и еще автономный необитаемый подводный аппарат включает оборудование системы технического зрения, оборудование системы геофизических исследований, электромагнит сброса аварийного балласта, где микроконтроллер также связан с движительно-рулевым аппаратом и электромагнитом сброса аварийного балласта, а бортовой вычислитель также связан с оборудованием системы технического зрения, а модуль управления полезной нагрузкой также связан с оборудованием системы геофизических исследований, а система электропитания также связанна с маршевым движителем, подруливающим движителем, сервоприводом поворота маршевого двигателя, оборудованием системы технического зрения, оборудованием системы геофизических исследований и электромагнитом сброса аварийного балласта, также система управления группы автономных необитаемых подводных аппаратов состоит из по меньшей мере одного гидроакустического маяка-ответчика связанного по гидроакустическому каналу с навигационной системой автономного необитаемого подводного аппарата и с модемом гидроакустической системы навигации комплекта технических средств запуска/приема аппаратов, причем антенна гидроакустической связи судна связана по гидроакустическому каналу с гидроакустической антенной автономного необитаемого подводного аппарата, а также связана с гидроакустической системой связи комплекта технических средств запуска/приема аппаратов, а модуль сопряжения связан по гидроакустическому каналу с модулем управления комплекта технических средств запуска/приема аппаратов, причем гидроакустическая система связи комплекта технических средств запуска/приема аппаратов связана по гидроакустическому каналу с гидроакустической антенной автономного необитаемого подводного аппарата.
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ МОРСКОГО БАЗИРОВАНИЯ | 2016 |
|
RU2614864C9 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ МОРСКОГО БАЗИРОВАНИЯ | 2016 |
|
RU2614864C9 |
| Способ управления подводным робототехническим комплексом по каналу связи | 2017 |
|
RU2656825C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ОЧИСТКИ МОРСКИХ РАЙОНОВ ОТ ПЛАВАЮЩИХ ПОДВОДНЫХ ОБЪЕКТОВ | 2020 |
|
RU2753658C1 |
| CN 104679008 A, 03.06.2015 | |||
| US 6904335 B2, 07.06.2005. | |||

