Изобретение относится к авиационному двигателестроению и газотурбинным двигателям (двигателям) наземного применения, а именно к регулированию осевого многоступенчатого компрессора.
Поворот лопаток направляющих аппаратов (НА) является одним из способов регулирования осевого многоступенчатого компрессора и позволяет достичь повышения КПД и запасов газодинамической устойчивости компрессора на эксплуатационных и дросельных режимах работы двигателя.
Изобретение позволяет изменять углы атаки рабочих лопаток (РЛ) и поддерживать их значение близким к расчетным. Достигается это путем изменения углов установки поворотных лопаток НА. Количество НА с поворотными лопатками ограничивается, главным образом, из конструктивных соображений.
Известны конструкции осевых многоступенчатых компрессоров с числом НА с поворотными лопатками от одного до четырех и более. При этом диапазоном поворота лопаток входного направляющего аппарата (ВНА) может превышать диапазон поворота лопаток последующих НА как в два, так и в десять раз. Между углами поворота лопаток ВНА и углами поворота лопаток последующих НА относительно друг друга существуют зависимости как линейные, при которых поворот лопаток НА пропорционален повороту лопаток ВНА, так и более сложные нелинейные, при которых поворот лопаток НА непропорционален повороту лопаток ВНА.
Из уровня техники известна конструкция механизма поворота лопаток НА осевого многоступенчатого компрессора (Патент № СА 2470081, МПК: F01D 17/16, F01D 9/02, F04D 29/56, опубл. 20.12.2004), в которой строго заданная нелинейная зависимость между углами поворота лопаток двух НА реализована при помощи штифта и спрофилированной направляющей канавки. Недостатками известной конструкции является сложная геометрия направляющей канавки и износ элементов, совершающих возвратно-поступательные движения в направляющих.
Известна конструкция, наиболее близкая к предлагаемому изобретению по технической сущности и достигаемому техническому результату, и выбрана авторами за прототип, является конструкция механизма поворота лопаток НА осевого многоступенчатого компрессора (Патент № ЕР 1724472, МПК: F01D 17/16, F04D 29/56, опубл. 22.11.2006), в котором нелинейная зависимость между углами поворота лопаток двух НА реализована при помощи дополнительного поворотного элемента и поворотной направляющей. Недостатками конструкции являются крупногабаритная система рычагов и износ элементов, совершающих возвратно-поступательные движения в направляющих.
Технической проблемой, решение которой обеспечивается при осуществлении предлагаемого изобретения, и невозможно обеспечить при использовании прототипа, является отсутствие поворота лопаток более, чем двух НА; крупногабаритная система рычагов при масштабировании ее для поворота лопаток пяти НА; наличие в конструкции элементов, совершающих возвратно-поступательные движения в направляющих.
Технической задачей предлагаемого изобретения является реализация механизма поворота лопаток пяти НА и регулирования осевого многоступенчатого компрессора, при котором поворот лопаток ВНА, пропорциональный перемещению силового привода, сопровождается поворотом лопаток НА с первой по четвертую ступени, непропорциональным повороту лопаток ВНА, для повышения коэффициента полезного действия (КПД), приемистости и запасов газодинамической устойчивости осевого многоступенчатого компрессора на эксплуатационных и дроссельных режимах работы двигателя; уменьшение габаритов механизма управления поворотными лопатками пяти НА для снижения массы двигателя и эффективного использования пространства вокруг двигателя; отсутствие в конструкции элементов, совершающих возвратно-поступательные движения в направляющих, для повышения ресурса и надежности двигателя.
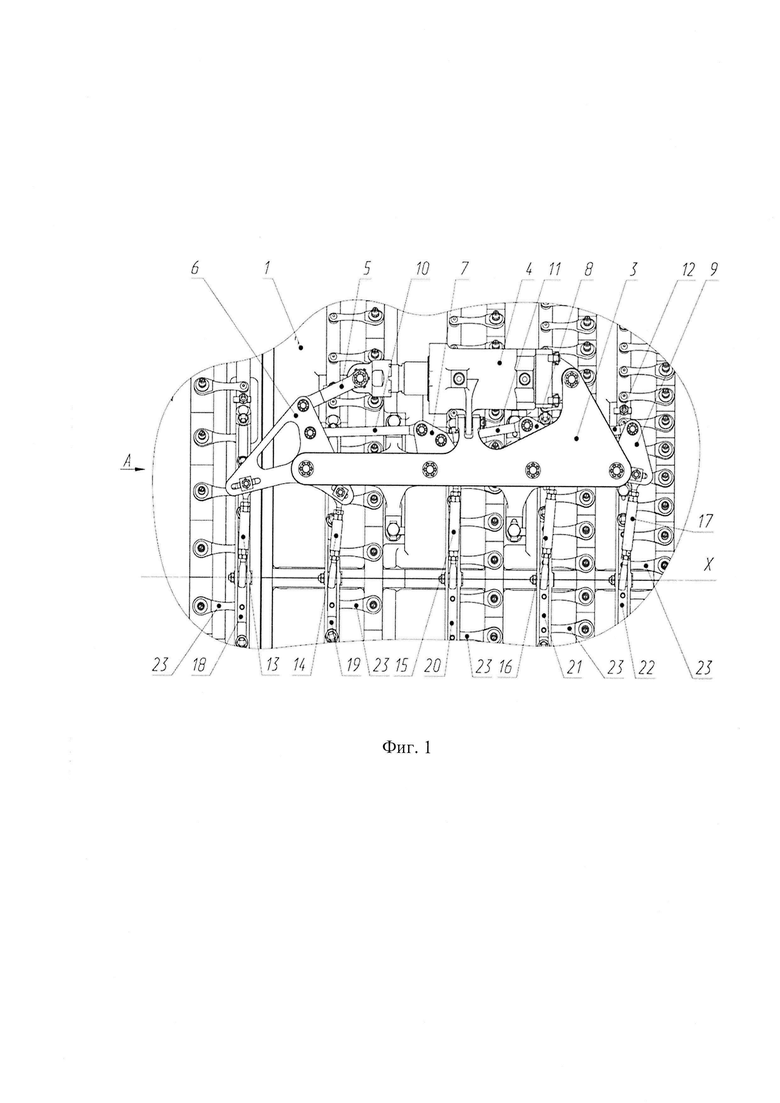
Техническая проблема решается тем, что в механизме поворота лопаток направляющих аппаратов осевого многоступенчатого компрессора, включающем статор компрессора, кольца синхронизирующие, тяги регулировочные, рычаги управления и шарниры, лопатки направляющих аппаратов с возможностью их поворота, при этом на лопатках направляющих аппаратов закреплены рычаги, согласно изобретению, дополнительно содержатся два модуля механизмов управления (2), установленных на статоре компрессора (1) симметрично относительно оси X двигателя, включающих кронштейны (3) с закрепленными на них силовыми приводами (4), с закрепленными в кронштейнах рычагами управления входного направляющего аппарата (ВНА) и направляющих аппаратов (НА) с первой по четвертую ступени (6…9), а также тяг ведущих (5), тяг рычагов (10…12) и тяг регулировочных (13…17), рычаги управления ВНА и НА первой ступени (6) с наличием диапазона поворота γ6(°), плеча повторения R6.7, угла α6.7 плеча повторения R6.7, плеча привода R6.6 и углов α6.24, α6.25 плеча привода R6.6;
рычаги управления НА второй ступени (7) с наличием диапазона поворота γ7(°), плеча повторения R7.8, угла α7.8 плеча повторения R7.8, плеча привода R7.26 и угла α7.26 плеча привода R7.26;
рычаги управления НА третьей ступени (8) с наличием диапазона поворота γ8(°), плеча повторения R8.9, угла α8.9 плеча повторения R8.9, плеча привода R8.27 и угла α8.27 плеча привода R8.27;
рычаги управления НА четвертой ступени (9) с наличием диапазона поворота γ9(°), плеча привода R9.28 и углом α9.28 плеча привода R9.28;
с возможностью соединения в рычажную передачу рычагов управления ВНА и НА первой ступени (6) с рычагами управления НА второй ступени (7) тягами рычагов управления (10) и шарнирами (29), а отношение размера плеча повторения R6.7 (мм) к размеру плеча привода R7.26 (мм) равно 0,75…1,05;
с возможностью соединения в рычажную передачу рычагов управления НА второй ступени (7) с рычагами управления НА третьей ступени (8) тягами рычагов управления (11) и шарнирами (29), а отношение размера плеча повторения R7.8(мм) к размеру плеча привода R8.27(мм) равно 0,55…0,85; с возможностью соединения в рычажную передачу рычагов управления НА третьей ступени (8) с рычагами управления НА четвертой ступени (9) тягами рычагов управления (12) и шарнирами (29), а отношение размера плеча повторения (мм) к размеру плеча привода R9.28 (мм) равно 0,65…0,95;
при этом отношение диапазона поворота γ6(°) рычага управления ВНА и НА первой ступени (6) к диапазону поворота γ7(°) рычага управления НА второй ступени (7) равно 1,05…1,20, а отношение диапазона поворота γ7(°) рычага управления НА второй ступени (7) к диапазону поворота γ8(°) рычага управления НА третьей ступени (8) равно 1,3…1,6, а отношение диапазона поворота γ8(°) рычага управления НА третьей ступени (8) к диапазону поворота γ9(°) рычага управления НА четвертой ступени (9) равно 1,1…1,4;
угол плеча повторения ав.7 в рычагах управления ВНА и НА первой ступени (6) равен 0°…15° с обеспечением поворота в диапазоне γ6(°) пропорционально перемещению силовых приводов, и поворота рычагов управления НА второй ступени (7) в диапазоне γ7(°) непропорционально перемещению силовых приводов;
угол плеча повторения α 7.8 в рычагах управления НА второй ступени (7) равен 0°…40° с обеспечением передачи поворота рычагов управления ВНА и НА первой ступени (6) в диапазоне γ6(°) на рычаги управления НА третьей ступени (8) и их поворота в диапазоне γ8(°) непропорционально перемещению силовых приводов;
угол плеча повторения α8.9 в рычагах управления НА третьей ступени (8) равен 0°…35° с обеспечением передачи поворота рычагов управления ВНА и НА первой ступени (6) в диапазоне γ6(°) на рычаги управления НА четвертой ступени (9) и их поворота в диапазоне γ9(°) непропорционально перемещению силовых приводов;
угол плеча привода α6.24 равен 80°…105°, а угол плеча привода ав.25 равен 90°…125° в рычагах управления ВНА и НА первой ступени (6) с обеспечением поворота их в диапазоне γ6(°), и поворота лопаток ВНА (24) с рычагами (23) в диапазоне β24(°) пропорционально перемещению силовых приводов, и поворота лопаток НА первой ступени (25) с рычагами (23) в диапазоне β25(°) непропорционально перемещению силовых приводов;
угол плеча привода α7.26 равен 95°…125° в рычагах управления НА второй ступени (7) с обеспечением поворота их в диапазоне γ7(°) и поворота лопаток НА второй ступени (26) с рычагами (23) в диапазоне β26(°) непропорционально перемещению силовых приводов;
угол плеча привода α8.27 равен 95°…135° в рычагах управления НА третьей ступени (8) с обеспечением поворота их в диапазоне γ8(°) и поворота лопаток НА третьей ступени (27) с рычагами (23) в диапазоне β27(°) непропорционально перемещению силовых приводов;
угол плеча привода α9.28 равен 70°…155° в рычагах управления НА четвертой ступени (9) с обеспечением поворота их в диапазоне γ9(°) и поворота лопаток НА четвертой ступени (28) с рычагами (23) в диапазоне β28(°) непропорционально перемещению силовых приводов;
при этом отношение диапазона поворота β24(°) лопаток ВНА (24) к диапазону поворота β25(°) лопаток НА первой ступени (25) равно 1,5…2,0, а отношение диапазона поворота β24(°) лопаток ВНА (24) к диапазону поворота β26(°) лопаток НА второй ступени (26) равно 2,5…3,5, а отношение диапазона поворота β24(°) лопаток ВНА (24) к диапазону поворота β27(°) лопаток НА третьей ступени (27) равно 5,0…6,0, а отношение диапазона поворота β24(°) лопаток ВНА (24) к диапазону поворота β28(°) лопаток НА четвертой ступени (28) равно 8,0…9,0.
Кроме того, согласно изобретению, для поворота лопаток ВНА (24) и НА первой ступени (25) применяют рычаги управления ВНА и НА первой ступени (6), тяги регулировочные (13, 14), кольца синхронизирующие (18 и 19) через рычаги (23).
Кроме того, согласно изобретению, для поворота лопаток НА второй ступени (26) применяют рычаги управления НА второй ступени (7), тяги регулировочные (15), кольца синхронизирующие (20) через рычаги (23).
Кроме того, согласно изобретению, для поворота лопаток НА третьей ступени (27) применяют рычаги управления НА третьей ступени (8), тяги регулировочные (16), кольца синхронизирующие (21) через рычаги (23).
Кроме того, согласно изобретению, для поворота лопаток НА четвертой ступени (28) применяют рычаги управления НА четвертой ступени (9), тяги регулировочные (17), кольца синхронизирующие (22) через рычаги (23).
Кроме того, согласно изобретению, поворот лопаток ВНА (24) в диапазоне β24(°), пропорциональный перемещению силовых приводов, обеспечивает поворот лопаток НА первой ступени (25) в диапазоне β25(°), поворот лопаток НА второй (26) ступени в диапазоне β26(°), поворот лопаток НА третьей (27) ступени в диапазоне β27(°) и поворот лопаток НА четвертой (28) ступени в диапазоне β28(°), непропорциональный повороту лопаток ВНА (24).
Как в прототипе, механизм поворота лопаток направляющих аппаратов осевого многоступенчатого компрессора включает статор компрессора, кольца синхронизирующие, тяги регулировочные, рычаги управления и шарниры, лопатки направляющих аппаратов с возможностью их поворота, при этом на лопатках направляющих аппаратов закреплены рычаги.
В отличии от прототипа, дополнительно содержатся два модуля механизмов управления (2), установленных на статоре компрессора (1) симметрично относительно оси X двигателя, включающих кронштейны (3) с закрепленными на них силовыми приводами (4), с закрепленными в кронштейнах рычагами управления ВНА и НА с первой по четвертую ступени (6…9), а также тяг ведущих (5), тяг рычагов (10…12) и тяг регулировочных (13…17),
рычаги управления ВНА и НА первой ступени (6) с наличием диапазона поворота γ6(°), плеча повторения R6.7, угла α6.7(°) плеча повторения R6.7, плеча привода R6.6 и углов α6.24, α6.25 плеча привода R6.6;
рычаги управления НА второй ступени (7) с наличием диапазона поворота γ7(°), плеча повторения R7.8, угла α7.8 плеча повторения R7.8, плеча привода R7.26 и угла α7.26 плеча привода R7.26;
рычаги управления НА третьей ступени (8) с наличием диапазона поворота γ8(°), плеча повторения R8.9, угла α8.9 плеча повторения R8.9, плеча привода R8.27 и угла α8.27 плеча привода R8.27;
рычаги управления НА четвертой ступени (9) с наличием диапазона поворота γ9(°), плеча привода R9.28 и углом α9.28 плеча привода R9.28;
с возможностью соединения в рычажную передачу рычагов управления ВНА и НА первой ступени (6) с рычагами управления НА второй ступени (7) тягами рычагов управления (10) и шарнирами (29), а отношение размера плеча повторения R6.7 (мм) к размеру плеча привода R7.26 (мм) равно 0,75…1,05;
с возможностью соединения в рычажную передачу рычагов управления НА второй ступени (7) с рычагами управления НА третьей ступени (8) тягами рычагов управления (11) и шарнирами (29), а отношение размера плеча повторения R7.8 (мм) к размеру плеча привода R8.27 (мм) равно 0,55…0,85;
с возможностью соединения в рычажную передачу рычагов управления НА третьей ступени (8) с рычагами управления НА четвертой ступени (9) тягами рычагов управления (12) и шарнирами (29), а отношение размера плеча повторения R8.9 (мм) к размеру плеча привода R9.28 (мм) равно 0,65…0,95;
при этом отношение диапазона поворота γ6(°) рычага управления ВНА и НА первой ступени (6) к диапазону поворота γ7(°) рычага управления НА второй ступени (7) равно 1,05…1,20, а отношение диапазона поворота γ7(°) рычага управления НА второй ступени (7) к диапазону поворота γ8(°) рычага управления НА третьей ступени (8) равно 1,3…1,6, а отношение диапазона поворота γ8(°) рычага управления НА третьей ступени (8) к диапазону поворота γ9(°) рычага управления НА четвертой ступени (9) равно 1,1…1,4;
угол плеча повторения α6.7 в рычагах управления ВНА и НА первой ступени (6) равен 0°…15° с обеспечением поворота в диапазоне γ6(°) пропорционально перемещению силовых приводов, и поворота рычагов управления НА второй ступени (7) в диапазоне γ7(°) непропорционально перемещению силовых приводов;
угол плеча повторения α7.8 в рычагах управления НА второй ступени (7) равен 0°…40° с обеспечением передачи поворота рычагов управления ВНА и НА первой ступени (6) в диапазоне γ6(°) на рычаги управления НА третьей ступени (8) и их поворота в диапазоне γ8(°) непропорционально перемещению силовых приводов;
угол плеча повторения α8.9 рычагах управления НА третьей ступени (8) равен 0°…35° с обеспечением передачи поворота рычагов управления ВНА и НА первой ступени (6) в диапазоне γ6(°) на рычаги управления НА четвертой ступени (9) и их поворота в диапазоне γ9(°) непропорционально перемещению силовых приводов;
угол плеча привода α6.24 равен 80°…105°, а угол плеча привода α6.25 равен 90°…125° в рычагах управления ВНА и НА первой ступени (6) с обеспечением поворота их в диапазоне γ6(°), и поворота лопаток ВНА (24) с рычагами (23) в диапазоне β24(°) пропорционально перемещению силовых приводов, и поворота лопаток НА первой ступени (25) с рычагами (23) в диапазоне β25(°) непропорционально перемещению силовых приводов;
угол плеча привода α7.26 равен 95°…125° в рычагах управления НА второй ступени (7) с обеспечением поворота их в диапазоне γ7(°) и поворота лопаток НА второй ступени (26) с рычагами (23) в диапазоне β26(°) непропорционально перемещению силовых приводов;
угол плеча привода α8.27 равен 95°…135° в рычагах управления НА третьей ступени (8) с обеспечением поворота их в диапазоне γ8(°) и поворота лопаток НА третьей ступени (27) с рычагами (23) в диапазоне β27(°) непропорционально перемещению силовых приводов;
угол плеча привода α9.28 равен 70°…155° в рычагах управления НА четвертой ступени (9) с обеспечением поворота их в диапазоне γ9(°) и поворота лопаток НА четвертой ступени (28) с рычагами (23) в диапазоне β28(°) непропорционально перемещению силовых приводов;
при этом отношение диапазона поворота β24(°) лопаток ВНА (24) к диапазону поворота β25(°) лопаток НА первой ступени (25) равно 1,5…2,0, а отношение диапазона поворота β24(°) лопаток ВНА (24) к диапазону поворота β26(°) лопаток НА второй ступени (26) равно 2,5…3,5, а отношение диапазона поворота β24(°) лопаток ВНА (24) к диапазону поворота β27(°) лопаток НА третьей ступени (27) равно 5,0…6,0, а отношение диапазона поворота β24(°) лопаток ВНА (24) к диапазону поворота β28(°) лопаток НА четвертой ступени (28) равно 8,0…9,0.
Сочетание в предлагаемом изобретении поворота лопаток ВНА, пропорционального перемещению силового привода, сопровождающегося поворотом лопаток НА с первой по четвертую ступени, непропорционально повороту лопаток ВНА, позволяет достичь повышения КПД, приемистости и запасов газодинамической устойчивости осевого многоступенчатого компрессора на эксплуатационных и дроссельных режимах работы двигателя.
Предлагаемое изобретение поясняется чертежами.
На фиг.1 представлена конструкция механизма поворота лопаток НА осевого многоступенчатого компрессора.
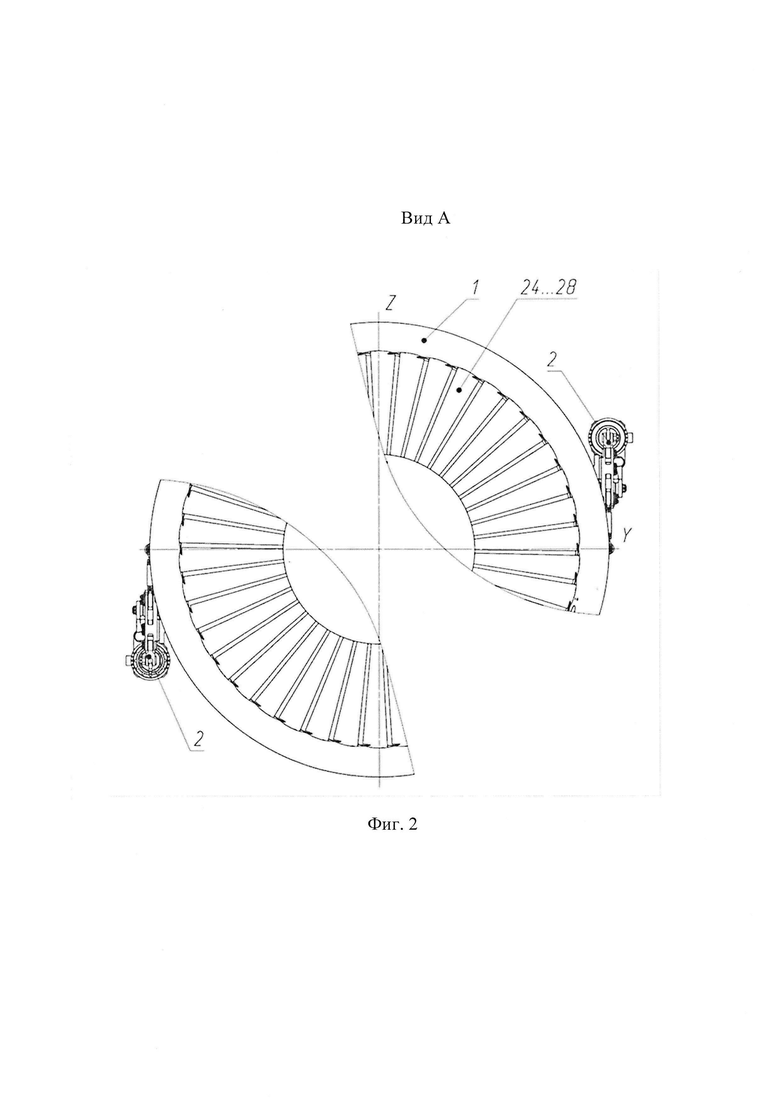
На фиг.2 показан фрагмент вида А с расположением механизма поворота лопаток НА осевого многоступенчатого компрессора.
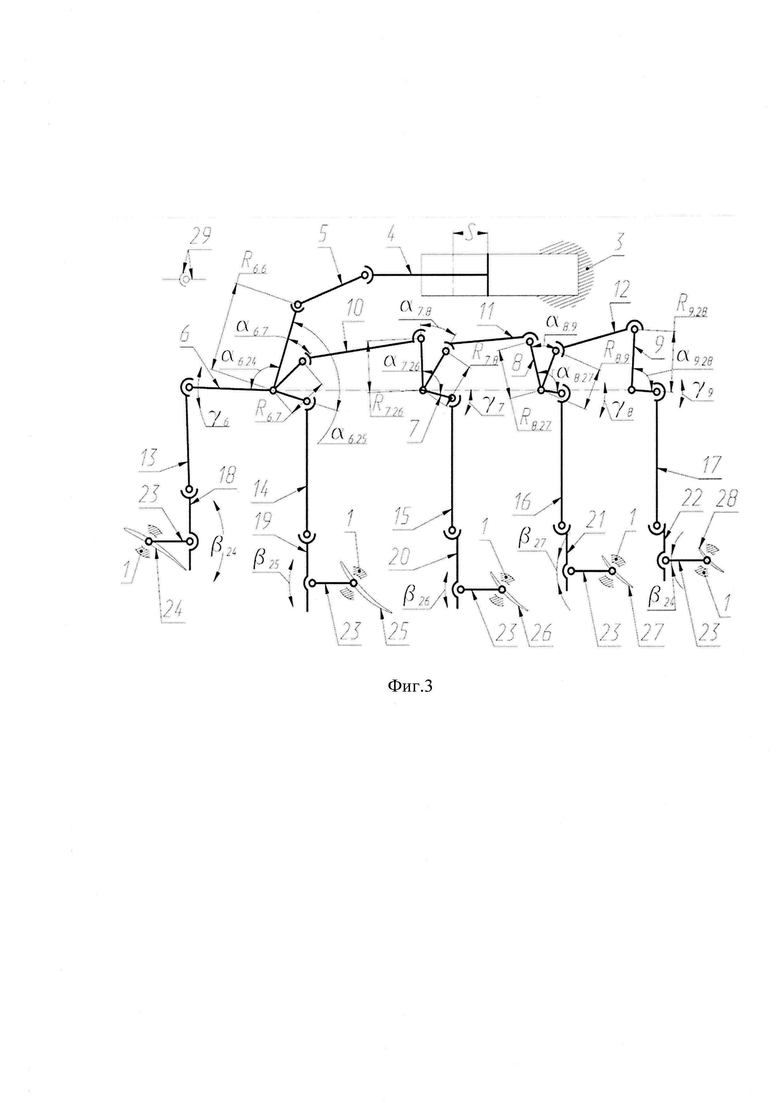
На фиг.3 изображена развертка кинематической схемы механизма поворота лопаток НА осевого многоступенчатого компрессора с обозначением основных параметров.
В заявке на изобретение использованы параметры с численными индексами.
Параметры с одним численным индексом для пояснения технического решения.
γ6 - диапазон поворота рычага управления ВНА и НА первой ступени (6), (°);
γ7 - диапазон поворота рычага управления НА второй ступени (7), (°);
γ8 - диапазон поворота рычага управления НА третьей ступени (8), (°);
γ9 - диапазон поворота рычага управления НА четвертой ступени (9), (°);
β24 - диапазон поворота лопаток (24) ВНА, (°);
β25 - диапазон поворота лопаток (25) НА первой ступени, (°);
β26 - диапазон поворота лопаток (26) НА второй ступени, (°);
β27 - диапазон поворота лопаток (27) НА третьей ступени, (°);
β28 - диапазон поворота лопаток (28) НА четвертой ступени, (°);
Параметры с двойным численным индексом для пояснения технического решения. Первый индекс соответствует позиция детали, которой принадлежит параметр, второй индекс соответствует позиция детали, на которую оказывается воздействие.
R6.6 - плечо привода в рычаге (6) для воздействия силового привода (4) на рычаг (6), мм;
R6.7 - плечо повторения в рычаге (6) для воздействия на рычаг (7), мм;
α6.7 - угол плеча повторения в рычаге (6) для воздействия на рычаг (7), (°);
α6.24 - угол плеча привода в рычаге (6) для воздействия на поворотные лопатки (24) ВНА, (°);
α6.25 - угол плеча привода в рычаге (6) для воздействия на поворотные лопатки (25) НА первой ступени, (°);
R7.8 - плечо повторения в рычаге (7) для воздействия на рычаг (8), мм;
α7.8 - угол плеча повторения в рычаге (7) для воздействия на рычаг (8), (°);
R7.26 - плечо привода в рычаге (7) для воздействия на поворотные лопатки (26) НА второй ступени, мм;
α7.26 - угол плеча привода в рычаге (7) для воздействия на поворотные лопатки (26) НА второй ступени, (°);
R8.9 - плечо повторения в рычаге (8) для воздействия на рычаг (9), мм; угол плеча повторения в рычаге (8) для воздействия на рычаг (9), (°);
R8.27 - плечо привода в рычаге (8) для воздействия на поворотные лопатки (27) НА третьей ступени, мм;
α8.27 - угол плеча привода в рычаге (8) для воздействия на поворотные лопатки (27) НА третьей ступени, (°);
R9.28 - плечо привода в рычаге (9) для воздействия на поворотные лопатки (28) НА четвертой ступени, мм;
α9.28 - угол плеча привода в рычаге (9) для воздействия на поворотные лопатки (28) НА четвертой ступени, (°);
В конструкции предлагаемого изобретении основными элементами являются:
- два модуля механизма управления (2);
- кольца синхронизирующие (18…22);
- лопатки ВНА и НА с первой по четвертую ступени (24…28) с рычагами НА (23) и с возможностью поворота.
Каждый модуль механизма управления (2) изобретения состоит из кронштейна (3) с закрепленным силовым приводом (4), с закрепленными на осях рычагом управления ВНА и НА первой ступени (6) и рычагами управления НА второй…четвертой ступеней (7…9), тяги ведущей (5), тяг рычагов (10…12) и тяг регулировочных (13…17).
Для поворота лопаток ВНА (24) и НА первой ступени (25) применяют рычаги управления ВНА и НА первой ступени (6), тяги регулировочные (13, 14), кольца синхронизирующие (18 и 19) через рычаги (23).
Для поворота лопаток НА второй ступени (26) применяют рычаги управления НА второй ступени (7), тяги регулировочные (15), кольца синхронизирующие (20) через рычаги (23).
Для поворота лопаток НА третьей ступени (27) применяют рычаги управления НА третьей ступени (8), тяги регулировочные (16), кольца синхронизирующие (21) через рычаги (23).
Для поворота лопаток НА четвертой ступени (28) применяют рычаги управления НА четвертой ступени (9), тяги регулировочные (17), кольца синхронизирующие (22) через рычаги (23).
Для повышения надежности двигателя, равномерного нагружения синхронизирующих колец (18…22) и исключения возможности их перекоса в изобретении используется два идентичных модуля механизма управления (2), установленных на статоре компрессора (1) симметрично относительно оси двигателя (ось X на фиг.1).
Конструкция предлагаемого изобретения позволяет выполнить замену модулей механизмов управления (2) в эксплуатации как целиком, так и их отдельны частей, путем съема кронштейна (3) со статора компрессора (1) и отсоединения тяг регулировочных (13…17) от синхронизирующих колец (18…22). Силовые привода (4) могут быть независимо заменены в эксплуатации без демонтажа модулей механизмов управления (2). В случае выхода из строя одного из силовых приводов (4), управление поворотом лопаток ВНА и НА первой…четвертой ступеней (24…28) может осуществляться вторым силовым приводом (4). Силовой привод (4) может быть гидравлическим, пневматическим или электрическим.
Работа предлагаемого технического решения реализована следующим образом.
К силовому приводу (4) через шарнир (29) одним концом присоединена тяга ведущая (5). Другой конец тяги ведущей (5) через шарнир (29) присоединен к плечу привода R6.6 в рычаге управления ВНА и НА первой ступени (6). Прямолинейные перемещения dS силового привода (4) в диапазоне S (мм) (см. фиг.3) передается через тягу ведущую (5) на рычаг управления ВНА и НА первой ступени (6) и сопровождается поворотом рычага управления ВНА и НА первой ступени (6) в диапазоне γ6(°) пропорционально перемещению dS силового привода.
Плечо повторения R6.7 в рычаге управления ВНА и НА первой ступени (6) соединяется с плечом привода R7.26 в рычаге управления НА второй ступени (7) тягой рычагов управления (10) и шарнирами (29), образуя рычажную передачу. При этом отношение размера плеча повторения R6.7 (мм) к размеру плеча привода R7.26(мм) равно 0,75…1,05. Поворот рычага управления ВНА и НА первой ступени (6) в диапазоне γ6(°) сопровождается поворотом рычага управления НА второй ступени (7) в диапазоне γ7(°). При этом отношение диапазона поворота γ6(°) рычага управления ВНА и НА первой ступени (6) к диапазону поворота γ7(°) рычага управления НА второй ступени (7) равно 1,05…1,20. Угол плеча повторения α6.7(°) в рычагах управления ВНА и НА первой ступени (6) равен 0°…15° с обеспечением поворота в диапазоне γ6(°) и поворота рычагов управления НА второй ступени (7) в диапазоне поворота γ7(°) непропорционально перемещению силового привода.
Плечо повторения R7.8 в рычаге управления НА второй ступени (7) соединяется с плечом привода R8.27 в рычаге управления НА третьей ступени (8) тягой рычагов управления (11) и шарнирами (29), образуя рычажную передачу. При этом отношение размера плеча повторения R7.8 (мм) к размеру плеча привода R8.27(мм) равно 0,55…0,85. Поворот рычага управления НА второй ступени (7) в диапазоне γ7(°) сопровождается поворотом рычага управления НА третьей ступени (8) в диапазоне γ8(°). При этом отношение диапазона поворота γ7 (°) рычага управления НА второй ступени (7) к диапазону поворота γ8(°) рычага управления НА третьей ступени (8) равно 1,3…1,6. Угол плеча повторения α7.8(°) в рычагах управления НА второй ступени (7) равен 0°…40° с обеспечением передачи поворота рычагов управления ВНА и НА первой ступени (6) в диапазоне γ6(°) на рычаги управления НА третьей ступени (8) и их поворота в диапазоне γ8(°) непропорционально перемещению силового привода.
Плечо повторения R8.9 в рычаге управления НА третьей ступени (8) соединяется с плечом привода R9.28 в рычаге управления НА четвертой ступени (9) тягой рычагов управления (12) и шарнирами (29), образуя рычажную передачу. При этом отношение размера плеча повторения R8.9 (мм) к размеру плеча привода R9.28(мм) равно 0,65…0,95. Поворот рычага управления НА третьей ступени (8) в диапазоне γ8(°) сопровождается поворотом рычага управления НА четвертой ступени (9) в диапазоне (γ9). При этом отношение диапазона поворота γ8(°) рычага управления НА третьей ступени (8) к диапазону поворота γ9(°) рычага управления НА четвертой ступени (9) равно 1,1…1,4. Угол плеча повторения α8.9(°)в рычагах управления НА третьей ступени (8) равен 0°…35° с обеспечением передачи поворота рычагов управления ВНА и НА первой ступени (6) в диапазоне γ6(°) на рычаги управления НА четвертой ступени (9) и их поворота в диапазоне γ9(°) непропорционально перемещению силового привода.
Рычаги управления ВНА и НА первой ступени (6), рычаги управления НА второй…четвертой ступеней (7…9) через тяги регулировочные (13…17) перемещают синхронизирующее кольца (18…22) относительно статора компрессора (1) в окружном и осевом направлениях. При перемещении синхронизирующих колец (18…22) происходит поворот рычагов НА (23) с лопатками ВНА и НА первой…четвертой ступеней (24…28).
Угол плеча привода ав.24 равен 80°…105°, а угол плеча привода ав.25 равен 90°…125° в рычагах управления ВНА и НА первой ступени (6) с обеспечением поворота их в диапазоне γ6(°), и поворота лопаток ВНА (24) с рычагами (23) в диапазоне β24(°) пропорционально перемещению силовых приводов, и поворота лопаток НА первой ступени (25) с рычагами (23) в диапазоне β25(°) непропорционально перемещению силовых приводов.
Угол плеча привода α7.26 равен 95°…125° в рычагах управления НА второй ступени (7) с обеспечением поворота их в диапазоне γ7 (°) и поворота лопаток НА второй ступени (26) с рычагами (23) в диапазоне β25(°) непропорционально перемещению силовых приводов.
Угол плеча привода α7.27 равен 95°…135° в рычагах управления НА третьей ступени (8) с обеспечением поворота их в диапазоне γ8(°) и поворота лопаток НА третьей ступени (27) с рычагами (23) в диапазоне β27(°) непропорционально перемещению силовых приводов.
Угол плеча привода α9.28 равен 70°…155° в рычагах управления НА четвертой ступени (9) с обеспечением поворота их в диапазоне γ9(°) и поворота лопаток НА четвертой ступени (28) с рычагами (23) в диапазоне β28(°) непропорционально перемещению силовых приводов.
В изобретении реализовано регулирование осевого многоступенчатого компрессора, при котором поворот лопаток ВНА (24) в диапазоне β24(°) обеспечивает поворот лопаток НА первой ступени (25) в диапазоне β25(°), лопаток НА второй (26) ступени в диапазоне β26(°), лопаток НА третьей (27) ступени в диапазоне β27(°) и лопаток НА четвертой (28) ступени в диапазоне β28(°). При этом отношение диапазона поворота β24(°) лопаток ВНА (24) к диапазону поворота β25(0) лопаток НА первой ступени (25) равно 1,5…2,0, а отношение диапазона поворота β24(°) лопаток ВНА (24) к диапазону поворота β26(°) лопаток НА второй ступени (26) равно 2,5…3,5, а отношение диапазона поворота β24(°) лопаток ВНА (24) к диапазону поворота β27(°) лопаток НА третьей ступени (27) равно 5,0…6,0, а отношение диапазона поворота β24(°) лопаток ВНА (24) к диапазону поворота β28(°) лопаток НА четвертой ступени (28) равно 8,0…9,0.
Возможность реализации регулирование осевого многоступенчатого компрессора, при котором поворот лопаток ВНА (24) в диапазоне β24(°) пропорционально перемещению силового привода, сопровождается поворотом лопаток НА первой…четвертой ступеней (25…28) в диапазонах β25…28(°) непропорционально повороту лопаток ВНА (24), обеспечивается за счет соединения рычагов управления ВНА и НА первой ступени (6) с рычагами управления НА второй…четвертой ступени (7…9) при помощи тяг рычагов (10…12) с шарнирами (29) в рычажные передачи и опытным подбора плеч повторения R6.7…8.9, углов плеч повторения α6.7…8.9, плеч приводов R7.26…9.28 и углов плеч приводов α6.24…9.28, вместо применения элементов, совершающих возвратно-поступательные движения в направляющих в прототипе.
Приведены примеры осуществления изобретения.
Пример 1
Отношение размера R6.7=40 мм к размеру R7.26=45 мм равно 0,9;
Отношение размера R7.8=35 мм к размеру R8.27=50 мм равно 0,7;
Отношение размера R8.9=40 мм к размеру R9.28=50 мм равно 0,8;
Отношение диапазона поворота γ6=41° рычага управления ВНА и НА первой ступени к диапазону поворота γ7=36,5° рычага управления НА второй ступени равно 1,1;
Отношение диапазона поворота γ7=36,5° рычага управления НА второй ступени к диапазону поворота y8=25,3° рычага управления НА третьей ступени равно 1,4;
Отношение диапазона поворота γ8 = 25,3° рычага управления НА третьей ступени к диапазону поворота γ9 - 20° рычага управления НА четвертой ступени равно 1,25;
Угол α6.7 равен 10°; угол α7.8 равен 35°; угол α8.9 равен 30°; угол α6.24 равен 100°, угол α6.25 равен 115°;угол α7.26 равен 110°; угол α8.27 равен 100°; угол α9.28 равен 80°;
Отношение диапазона поворота лопаток ВНА β24=60° к диапазону поворота лопаток НА первой ступени β25=31° равно 1,9;
Отношение диапазона поворота лопаток ВНА β24=60° к диапазону поворота лопаток НА второй ступени β26=20° равно 2,9;
Отношение диапазона поворота лопаток ВНА β24=60° к диапазону поворота лопаток НА третьей ступени β27=12° равно 5;
Отношение диапазона поворота лопаток ВНА β24=60° к диапазону поворота лопаток НА четвертой ступени 028=1° равно 8,3;
Пример 2
Поворот рычага управления ВНА и НА первой ступени (6) на углы равные 6.5, 14…37, 50, 62…88, 100% от диапазона γ6 сопровождается поворотом рычага управления НА второй ступени (7) на соответствующие углы равные 5, 12…34, 46, 58…87, 100% от диапазона γ7.
Поворот рычага управления ВНА и НА первой ступени (6) на углы равные 6.5, 14…37, 50, 62…88, 100% от диапазона γ6 сопровождается поворотом рычага управления НА третьей ступени (8) на соответствующие углы равные 4, 9…29, 40, 54…85, 100% от диапазона γ8.
Поворот рычага управления ВНА и НА первой ступени (6) на углы равные 6.5, 14…37, 50, 62…88, 100% от диапазона γ6 сопровождается поворотом рычага управления НА четвертой ступени (9) на соответствующие углы равные 4, 9…28, 40, 53…84, 100% от диапазона γ9.
Пример 3
Поворот лопаток ВНА (24) на углы равные 7.4, 16…41, 53, 65…90, 100% от диапазона β24 сопровождается поворотом лопаток НА первой ступени (25) на соответствующие углы равные 4, 10…31, 43, 56…86, 100% от диапазона γ25.
Поворот лопаток ВНА (24) на углы равные 7.4, 16…41, 53, 65…90, 100% от диапазона β24 сопровождается поворотом лопаток НА второй ступени (26) на соответствующие углы равные 12,18…45, 59, 67…87,100% от диапазона γ26.
Поворот лопаток ВНА (24) на углы равные 7.4, 16…41, 53, 65…90, 100% от диапазона β24 сопровождается поворотом лопаток НА третьей ступени (27) на соответствующие углы равные 7, 12…30, 38, 52…86, 100% от диапазона γ27.
Поворот лопаток ВНА (24) на углы равные 7.4, 16…41, 53, 65…90, 100% от диапазона β24 сопровождается поворотом лопаток НА четвертой ступени (28) на соответствующие углы равные 4, 10…27, 38, 52…84, 100% от диапазона γ27.
Положительный технический результат получен во всех приведенных примерах осуществления изобретения. Соотношения параметров получены расчетным и экспериментальным путями.
В результате по расчетным данным получено повышение КПД, приемистости и запасов газодинамической устойчивости осевого многоступенчатого компрессора на эксплуатационных и дроссельных режимах работы двигателя; разработан малогабаритный механизм поворота лопаток пяти НА.
Предлагаемый механизм поворота лопаток направляющих аппаратов осевого многоступенчатого компрессора успешно прошел экспериментальные испытания на опытных газотурбинных двигателях и, в настоящее время, внедряется в компрессорах перспективных авиационных двигателей.
Таким образом, выполнение предлагаемого изобретения с вышеуказанными отличительными признаками, в совокупности с известными признаками, позволяет реализовать механизм поворота лопаток пяти НА и регулирование осевого многоступенчатого компрессора, при котором поворот лопаток ВНА, пропорциональный перемещению силового привода, сопровождается поворотом лопаток НА с первой по четвертую ступени, непропорциональным повороту лопаток ВНА, для повышения КПД, приемистости и запасов газодинамической устойчивости осевого многоступенчатого компрессора на эксплуатационных и дроссельных режимах работы двигателя; уменьшить габариты механизма поворота пяти НА для снижения массы двигателя и эффективного использования пространства вокруг двигателя; повысить ресурс и надежность авиационного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОСЕВОЙ КОМПРЕССОР ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2111385C1 |
| СИСТЕМА УПРАВЛЕНИЯ СТУПЕНЯМИ ПОВОРОТНЫХ ЛОПАТОК СТАТОРА КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2422644C1 |
| Компрессор низкого давления газотурбинного двигателя авиационного типа (варианты) | 2016 |
|
RU2614708C1 |
| СИСТЕМА УПРАВЛЕНИЯ СТУПЕНЯМИ ПОВОРОТНЫХ ЛОПАТОК СТАТОРА КОМПРЕССОРА ВЫСОКОГО ДАВЛЕНИЯ | 2011 |
|
RU2474698C1 |
| ОСЕВОЙ КОМПРЕССОР ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1998 |
|
RU2141062C1 |
| СТРУЙНО-РЕАКТИВНАЯ ТУРБИНА | 2015 |
|
RU2614946C2 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ ЛОПАТОК НАПРАВЛЯЮЩЕГО АППАРАТА СТАТОРА МНОГОСТУПЕНЧАТОГО КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2017 |
|
RU2674227C1 |
| Компрессор низкого давления газотурбинного двигателя авиационного типа (варианты) | 2016 |
|
RU2614709C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА, СНАБЖЕННОГО БОРТОВЫМ РАДИОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2001 |
|
RU2191721C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2555933C2 |
Изобретение относится к авиационному двигателестроению и газотурбинным двигателям наземного применения, а именно к регулированию осевого многоступенчатого компрессора. Механизм поворота включает статор компрессора, кольца синхронизирующие, тяги регулировочные, рычаги управления и шарниры, лопатки направляющих аппаратов с возможностью их поворота, при этом на лопатках направляющих аппаратов закреплены рычаги. Дополнительно содержатся два модуля механизмов управления, установленных на статоре компрессора симметрично относительно оси X двигателя, включающих кронштейны с закрепленными на них силовыми приводами, с закрепленными в кронштейнах рычагами управления ВНА и НА с первой по четвертую ступени, а также тяги ведущие, тяги рычагов и тяги регулировочные. Устройство содержит плечи повторения, плечи привода, с возможностью соединения в рычажные передачи рычагов управления НА тягами рычагов и шарнирами. Рычаги управления ВНА и НА с первой по четвертую ступени перемещают синхронизирующие кольца относительно статора компрессора в окружном и осевом направлениях. При перемещении синхронизирующих колец происходит поворот рычагов НА с лопатками ВНА и НА с первой по четвертую ступени. Между поворотом лопаток ВНА и поворотом лопаток НА с первой по четвертую ступени существуют соотношения, при которых поворот лопаток ВНА, пропорциональный перемещению силовых приводов, сопровождается поворотом лопаток НА с первой по четвертую ступени, непропорциональным повороту лопаток ВНА. Предлагаемое изобретение позволяет повысить КПД и запасы газодинамической устойчивости осевого многоступенчатого компрессора на эксплуатационных и дроссельных режимах работы двигателя, повысить ресурс и надежность авиационного двигателя. 5 з.п. ф-лы, 3 ил.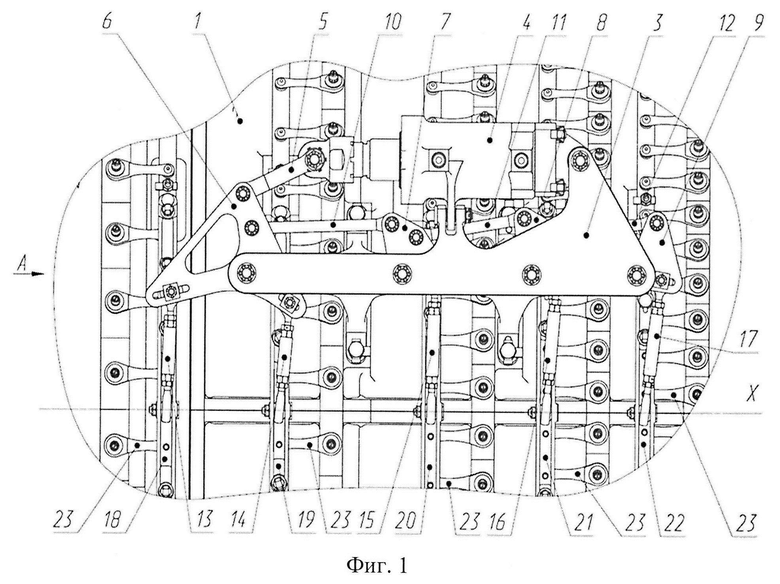
1. Механизм поворота лопаток направляющих аппаратов осевого многоступенчатого компрессора, включающий статор компрессора, кольца синхронизирующие, тяги регулировочные, рычаги управления и шарниры, лопатки направляющих аппаратов с возможностью их поворота, при этом на лопатках направляющих аппаратов закреплены рычаги, отличающийся тем, что дополнительно содержит два модуля механизмов управления (2), установленных на статоре компрессора (1) симметрично относительно оси X двигателя, включающих кронштейны (3) с закрепленными на них силовыми приводами (4), с закрепленными в кронштейнах рычагами управления входными направляющими аппаратами и направляющими аппаратами с первой по четвертую ступени (6…9), а также тяг ведущих (5), тяг рычагов (10…12) и тяг регулировочных (13…17),
рычаги управления входными направляющими аппаратами и направляющими аппаратами первой ступени (6) с наличием диапазона поворота γ6 (°), плеча повторения R6.7, угла α6.7 плеча повторения R6.7, плеча привода R6.6 и углов α6.24, α6.25 плеча привода R6.6;
рычаги управления направляющими аппаратами второй ступени (7) с наличием диапазона поворота γ7 (°), плеча повторения R7.8, угла α7.8 плеча повторения R7.8, плеча привода R7.26 и угла α7.26 плеча привода R7.26;
рычаги управления направляющими аппаратами третьей ступени (8) с наличием диапазона поворота γ8 (°), плеча повторения R8.9, угла α8.9 плеча повторения R8.9, плеча привода R8.27 и угла α8.27 плеча привода R8.27;
рычаги управления направляющими аппаратами четвертой ступени (9) с наличием диапазона поворота γ9 (°), плеча привода R9.28 и углом α9.28 плеча привода R9.28;
с возможностью соединения в рычажную передачу рычагов управления входными направляющими аппаратами и направляющими аппаратами первой ступени (6) с рычагами управления направляющих аппаратов второй ступени (7) тягами рычагов управления (10) и шарнирами (29), а отношение размера плеча повторения R6.7 (мм) к размеру плеча привода R7.26 (мм) равно 0,75…1,05;
с возможностью соединения в рычажную передачу рычагов управления направляющих аппаратов второй ступени (7) с рычагами управления направляющих аппаратов третьей ступени (8) тягами рычагов управления (11) и шарнирами (29), а отношение размера плеча повторения R7.8 (мм) к размеру плеча привода R8.27 (мм) равно 0,55…0,85;
с возможностью соединения в рычажную передачу рычагов управления направляющих аппаратов третьей ступени (8) с рычагами управления направляющих аппаратов четвертой ступени (9) тягами рычагов управления (12) и шарнирами (29), а отношение размера плеча повторения R8.9 (мм) к размеру плеча привода R9.28 (мм) равно 0,65…0,95;
при этом отношение диапазона поворота γ6 (°) рычага управления входных направляющих аппаратов и направляющих аппаратов первой ступени (6) к диапазону поворота γ7 (°) рычага управления направляющих аппаратов второй ступени (7) равно 1,05…1,20, а отношение диапазона поворота γ7 (°) рычага управления направляющих аппаратов второй ступени (7) к диапазону поворота γ8 (°) рычага управления направляющих аппаратов третьей ступени (8) равно 1,3…1,6, а отношение диапазона поворота γ8 (°) рычага управления направляющих аппаратов третьей ступени (8) к диапазону поворота γ9 (°) рычага управления направляющих аппаратов четвертой ступени (9) равно 1,1…1,4;
угол плеча повторения α6.7 в рычагах управления входных направляющих аппаратов и направляющих аппаратов первой ступени (6) равен 0°…15° с обеспечением поворота в диапазоне γ6 (°) пропорционально перемещению силовых приводов, и поворота рычагов управления направляющих аппаратов второй ступени (7) в диапазоне γ7 (°) непропорционально перемещению силовых приводов;
угол плеча повторения α7.8 в рычагах управления направляющих аппаратов второй ступени (7) равен 0°…40° с обеспечением передачи поворота рычагов управления входных направляющих аппаратов и направляющих аппаратов первой ступени (6) в диапазоне γ6 (°) на рычаги управления направляющих аппаратов третьей ступени (8) и их поворота в диапазоне γ8 (°) непропорционально перемещению силовых приводов;
угол плеча повторения α8.9 в рычагах управления направляющих аппаратов третьей ступени (8) равен 0°…35° с обеспечением передачи поворота рычагов управления входных направляющих аппаратов и направляющих аппаратов первой ступени (6) в диапазоне γ6 (°) на рычаги управления направляющих аппаратов четвертой ступени (9) и их поворота в диапазоне γ9 (°) непропорционально перемещению силовых приводов;
угол плеча привода α6.24 равен 80°…105°, а угол плеча привода α6.25 равен 90°…125° в рычагах управления входных направляющих аппаратов и направляющих аппаратов первой ступени (6) с обеспечением поворота их в диапазоне γ6 (°), и поворота лопаток входных направляющих аппаратов (24) с рычагами (23) в диапазоне β24 (°) пропорционально перемещению силовых приводов, и поворота лопаток направляющих аппаратов первой ступени (25) с рычагами (23) в диапазоне β25 (°) непропорционально перемещению силовых приводов;
угол плеча привода α7.27 равен 95°…125° в рычагах управления направляющих аппаратов второй ступени (7) с обеспечением поворота их в диапазоне γ7 (°) и поворота лопаток направляющих аппаратов второй ступени (26) с рычагами (23) в диапазоне β26 (°) непропорционально перемещению силовых приводов;
угол плеча привода α8.27 равен 95°…135° в рычагах управления направляющих аппаратов третьей ступени (8) с обеспечением поворота их в диапазоне γ8 (°) и поворота лопаток направляющих аппаратов третьей ступени (27) с рычагами (23) в диапазоне β27 (°) непропорционально перемещению силовых приводов;
угол плеча привода α9.28 равен 70°…155° в рычагах управления направляющих аппаратов четвертой ступени (9) с обеспечением поворота их в диапазоне γ9 (°) и поворота лопаток направляющих аппаратов четвертой ступени (28) с рычагами (23) в диапазоне β28 (°) непропорционально перемещению силовых приводов;
при этом отношение диапазона поворота β24 (°) лопаток входных направляющих аппаратов (24) к диапазону поворота β25 (°) лопаток направляющих аппаратов первой ступени (25) равно 1,5…2,0, а отношение диапазона поворота β24 (°) лопаток входных направляющих аппаратов (24) к диапазону поворота β26 (°) лопаток направляющих аппаратов второй ступени (26) равно 2,5…3,5, а отношение диапазона поворота β24 (°) лопаток входных направляющих аппаратов (24) к диапазону поворота β27 (°) лопаток направляющих аппаратов третьей ступени (27) равно 5,0…6,0, а отношение диапазона поворота β24 (°) лопаток входных направляющих аппаратов (24) к диапазону поворота β28 (°) лопаток направляющих аппаратов четвертой ступени (28) равно 8,0…9,0.
2. Механизм по п. 1, отличающийся тем, что для поворота лопаток входных направляющих аппаратов (24) и направляющих аппаратов первой ступени (25) применяют рычаги управления входных направляющих аппаратов и направляющих аппаратов первой ступени (6), тяги регулировочные (13, 14), кольца синхронизирующие (18 и 19) через рычаги (23).
3. Механизм по п. 1, отличающийся тем, что для поворота лопаток направляющих аппаратов второй ступени (26) применяют рычаги управления направляющих аппаратов второй ступени (7), тяги регулировочные (15), кольца синхронизирующие (20) через рычаги (23).
4. Механизм по п. 1, отличающийся тем, что для поворота лопаток направляющих аппаратов третьей ступени (27) применяют рычаги управления направляющих аппаратов третьей ступени (8), тяги регулировочные (16), кольца синхронизирующие (21) через рычаги (23).
5. Механизм по п. 1, отличающийся тем, что для поворота лопаток направляющих аппаратов четвертой ступени (28) применяют рычаги управления направляющих аппаратов четвертой ступени (9), тяги регулировочные (17), кольца синхронизирующие (22) через рычаги (23).
6. Механизм по п. 1, отличающийся тем, что поворот лопаток входных направляющих аппаратов (24) в диапазоне β24 (°) пропорционально перемещению силовых приводов обеспечивает поворот лопаток направляющих аппаратов первой ступени (25) в диапазоне β25 (°), поворот лопаток направляющих аппаратов второй (26) ступени в диапазоне β26 (°), поворот лопаток направляющих аппаратов третьей (27) ступени в диапазоне β27 (°) и поворот лопаток направляющих аппаратов четвертой (28) ступени в диапазоне β28 (°), непропорциональный повороту лопаток входных направляющих аппаратов (24).
| СИСТЕМА УПРАВЛЕНИЯ СТУПЕНЯМИ ЛОПАТОК СТАТОРА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С ИЗМЕНЯЕМЫМ УГЛОМ УСТАНОВКИ | 2006 |
|
RU2396439C2 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ ЛОПАТОК НАПРАВЛЯЮЩЕГО АППАРАТА СТАТОРА МНОГОСТУПЕНЧАТОГО КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2017 |
|
RU2674227C1 |
| СИСТЕМА УПРАВЛЕНИЯ СТУПЕНЯМИ ПОВОРОТНЫХ ЛОПАТОК СТАТОРА КОМПРЕССОРА ВЫСОКОГО ДАВЛЕНИЯ | 2011 |
|
RU2474698C1 |
| US 4295784 A, 20.10.1981 | |||
| US 3146585 A, 01.09.1964 | |||
| СПОСОБ ПРОИЗВОДСТВА ЖЕЛЕЙНОГО МАРМЕЛАДА | 2002 |
|
RU2227527C1 |
| УСТРОЙСТВО ИЗМЕНЕНИЯ УГЛА УСТАНОВКИ ЛОПАТОК ДВУХ СТУПЕНЕЙ НЕПОДВИЖНОГО ЛОПАТОЧНОГО АППАРАТА В ТУРБОРЕАКТИВНОМ ДВИГАТЕЛЕ | 2004 |
|
RU2338932C2 |

