Область техники, к которой относится изобретение
Изобретение относится к радиолокации, в частности к способам обеспечения инструментальной посадки вертолетов на корабли.
Уровень техники
На большинство кораблей с одиночным или групповым базированием вертолетов (Ка-27, Ка-31 и других) устанавливается навигационно-посадочный комплекс типа В-7М2 (http://niiit-rk.ru/production/v-7m2/v-7m2.html).
В состав комплекса В-7М2 входит азимутально-дальномерный радиомаяк (АДРМ), обеспечивающий навигацию вертолетов вблизи корабля, и посадочный радиолокационный комплекс (ПРЛК), обеспечивающий посадку вертолетов на корабль.
АДРМ и ПРЛК выдают на борт вертолета сигналы, обеспечивающие инструментальный заход на посадку, взаимодействуя с бортовым радиоэлектронным оборудованием (БРЭО) вертолета типа А-340, А-380 и их модификациями.
В зависимости от назначения корабля комплекс В-7М2 может быть установлен не в полной комплектации – либо один АДРМ, либо один ПРЛК. На ряде малых кораблей с одиночным базированием вертолетов из-за ограниченных возможностей средства комплекса В-7М2 могут вовсе не устанавливаться.
Раскрытие сущности изобретения
Задачей заявляемого изобретения является обеспечение инструментального захода вертолета на посадку без использования радиомаячных средств и посадочных РЛС.
Указанная задача решается за счет использования средств имитации сигналов АДРМ с аппаратурой передачи данных (АПД), ПРЛК с линией передачи сигналов управления (ЛПСУ), сигналов микроволновой системы посадки (MLS). В качестве запускающих сигналов имитаторов используются выходные сигналы корабельной обзорной трехкоординатной РЛС (например, типа 5П-26М), либо выход сигналов АДРМ.
В способе обеспечения инструментального захода на посадку корабельных вертолетов с использованием корабельной трехкоординатной РЛС с антенной, либо АДРМ с антенной, либо совместно РЛС и АДРМ, согласно изобретению, выходы с координатами вертолета подключаются через коммутатор и вычислитель-преобразователь к имитаторам АДРМ, ПРЛК и MLS.
При этом производится имитация сигналов АДРМ, ПРЛК и MLS при помощи имитаторов, вычислителя-преобразователя и коммутатора.
Таким образом, достигается следующий технический результат - обеспечение инструментального захода вертолета на посадку без использования радиомаячных средств и посадочных РЛС.
Краткое описание чертежей
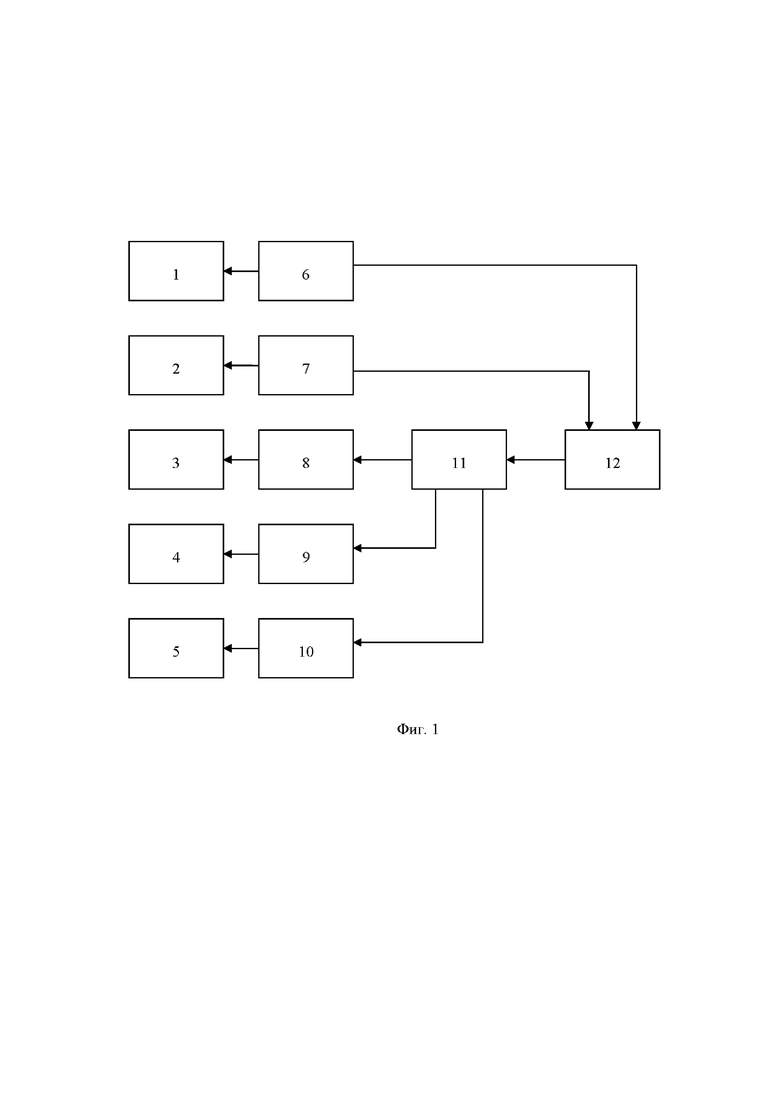
Работа средств инструментальной посадки поясняется на фиг. 1.
1 - антенна;
2 - антенна;
3 - антенна;
4 - антенна;
5 - антенна;
6 - корабельная трехкоординатная РЛС
7 - АДРМ (при наличии его на корабле)
8 - имитатор ЛПСУ;
9 - имитатор MLS;
10 - имитатор АДРМ;
11 - вычислитель-преобразователь;
12 - коммутатор.
Корабельная РЛС 6 принимает с антенны 1 сигнал, отраженный от вертолета, вычисляет координаты вертолета и передает их на первый вход коммутатора 12. АДРМ 7 (при наличии его на корабле) при помощи антенны 2 осуществляет связь с вертолетом по АПД, вычисляет его координаты и передает их на второй вход коммутатора 12. Из коммутатора 12 сигналы поступают в вычислитель-преобразователь 11, где производится совместная обработка (фильтрация) координатной информации вертолета, преобразование координат в систему относительно посадочной траектории и формирование выходных сигналов для запуска имитаторов. Сигналы с выходов вычислителя-преобразователя 11 поступают на входы имитатора ЛПСУ 8, имитатора MLS 9 и имитатора АДРМ 10, с которых при помощи антенн 3, 4 и 5 имитируемые сигналы излучаются в эфир.
Осуществление изобретения
Указанные средства инструментального захода на посадку работают следующим образом. Координаты вертолета, заходящего на посадку, с выходов АДРМ и корабельной РЛС через коммутатор 12 поступают на вход вычислителя-преобразователя 11. В нем производится совместная обработка (фильтрация) координатной информации вертолета, преобразование координат в систему относительно посадочной траектории и формирование выходных сигналов для запуска имитаторов.
В имитаторах 8, 9. 10 по полученным сигналам генерируются сигналы, аналогичные по формату сигналам реальных систем АДРМ, ПРЛК, MLS.
Имитаторы ЛПСУ (8) и MLS (9) используются при установке на корабле только одного АДРМ, а имитатор АДРМ – при установке на корабле только одного ПРЛК. Все три имитатора устанавливаются при отсутствии на корабле комплекса типа В-7М2.
Конструктивно предлагаемые средства выполняются в едином малогабаритном блоке (модуле), устанавливаемом на переборку помещения корабля. Малогабаритные антенны (типа волновой канал) устанавливаются на кормовой части надстройки корабля и сориентированы в сторону захода на посадку.
Способ обеспечения инструментального захода на посадку корабельных вертолетов, заключающийся в том, что на корабле с помощью азимутально-дальномерного радиомаяка (АДРМ) и/или корабельной обзорной трехкоординатной радиолокационной станции (РЛС) принимают сигналы, отраженные от вертолета, вычисляют координаты вертолета и передают их на входы коммутатора, из которого они поступают в вычислитель-преобразователь, где производится их совместная обработка, преобразование координат в систему относительно посадочной траектории и формирование выходных сигналов для запуска имитаторов: имитатора линии передачи сигналов управления (ЛПСУ), имитатора микроволновой системы посадки (MLS), имитатора АДРМ, в которых генерируются выходные сигналы, аналогичные по формату сигналам реальных систем АДРМ, посадочно-радиолокационного комплекса (ПРЛК), MLS, и излучаются с помощью антенн, сориентированных в сторону захода на посадку. Обеспечивается инструментальный заход вертолета на посадку без использования радиомаячных средств и посадочных РЛС. 1 ил.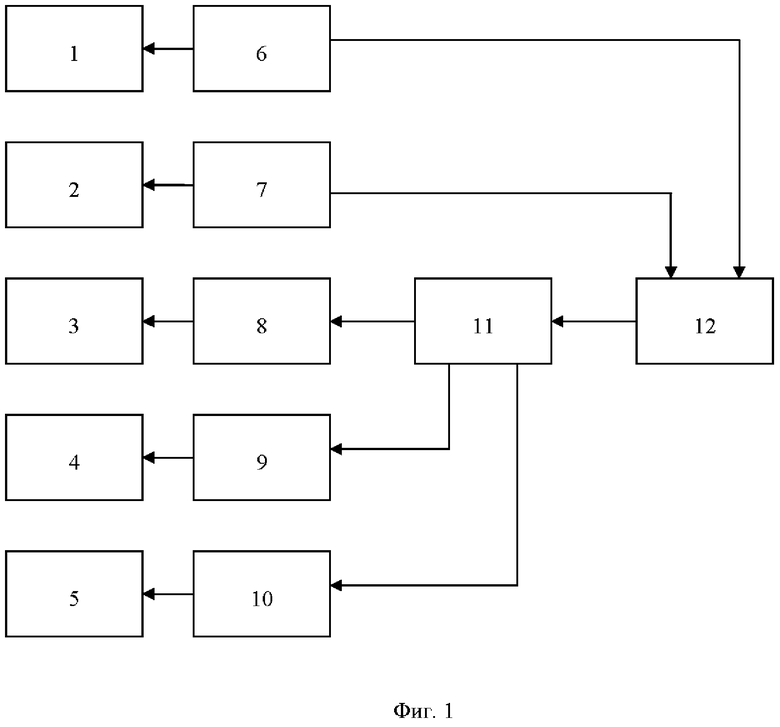
Способ обеспечения инструментального захода на посадку корабельных вертолетов, заключающийся в том, что на корабле с помощью азимутально-дальномерного радиомаяка (АДРМ) и/или корабельной обзорной трехкоординатной радиолокационной станции (РЛС) принимают сигналы, отраженные от вертолета, вычисляют координаты вертолета и передают их на входы коммутатора, из которого они поступают в вычислитель-преобразователь, где производится их совместная обработка, преобразование координат в систему относительно посадочной траектории и формирование выходных сигналов для запуска имитаторов: имитатора линии передачи сигналов управления (ЛПСУ), имитатора микроволновой системы посадки (MLS), имитатора АДРМ, в которых генерируются выходные сигналы, аналогичные по формату сигналам реальных систем АДРМ, посадочно-радиолокационного комплекса (ПРЛК), MLS, и излучаются с помощью антенн, сориентированных в сторону захода на посадку.
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| Установка для очистки зерна | 1947 |
|
SU75058A1 |
| 0 |
|
SU190395A1 | |
| Способ эмалирования аппаратуры | 1950 |
|
SU94008A1 |
| FR 2945889 A1, 26.11.2010. | |||

