Изобретение относится к радиолокации, в частности к способам обеспечения посадки летательных аппаратов (ЛА) на авианесущие корабли.
Для обеспечения посадки ЛА на авианесущие корабли ВМФ в нашей стране и за рубежом используются посадочные радиолокационные комплексы (ПРЛК), представляющие собой следящие РЛС миллиметрового диапазона волн с индикаторами процесса посадки (АРМ) и каналами передачи сигналов управления на борт ЛА.
В связи с тем, что посадка на корабль является в части пилотирования самым сложным этапом полета, к средствам отображения процесса захода на посадку предъявляются повышенные требования.
Для оценки возможности выполнения посадки диспетчеру выводится на экран значительное количество параметров, что требует от него повышенного внимания и напряжения. В перечень данных параметров входят:
- текущие координаты ЛА относительно корабля;
- величины отклонений ЛА от посадочной траектории (глиссады);
- вертикальная скорость и скорость сближения с кораблем;
- текущая высота полета ЛА;
- динамические перемещения корабля (крен, тангаж, скорость, вертикальные перемещения);
- метеопараметры и др.
В связи с этим разрабатываются различные варианты представления информации для диспетчера, снижающие его нагрузку и повышающие достоверность изображения.
Задачей заявляемого изобретения является обеспечение управления посадкой ЛА на корабль при помощи средств дополненной виртуальной реальности.
Указанная задача решается за счет применения средств дополненной виртуальной реальности (ДВР). Такие средства широко используются в авиации, например, при отображении параметров движения ЛА на лобовом стекле кабины пилота.
В ПРЛК вся полученная информация по ЛА и кораблю поступает и обрабатывается на АРМ в форме цифровых табло, шкал, графиков траекторий, цветовой окраски различных видов информации, команд управления и т.д.
Рядом с АРМ дополнительно устанавливается монитор, где отображается видеоинформация о заходящем на посадку ЛА.
В связи с этим диспетчеру при управлении посадкой наблюдать и оценивать процесс посадки приходится по двум индикаторам, что значительно усложняет управление ЛА.
Кроме того, на заключительном этапе посадки (до зацепления за аэрофинишер) управление ЛА осуществляет оператор визуальной посадки (ОВП), который должен визуально наблюдать садящийся самолет и по специальному монитору следить за его параметрами. Эта ситуация также значительно осложняет работу ОВП.
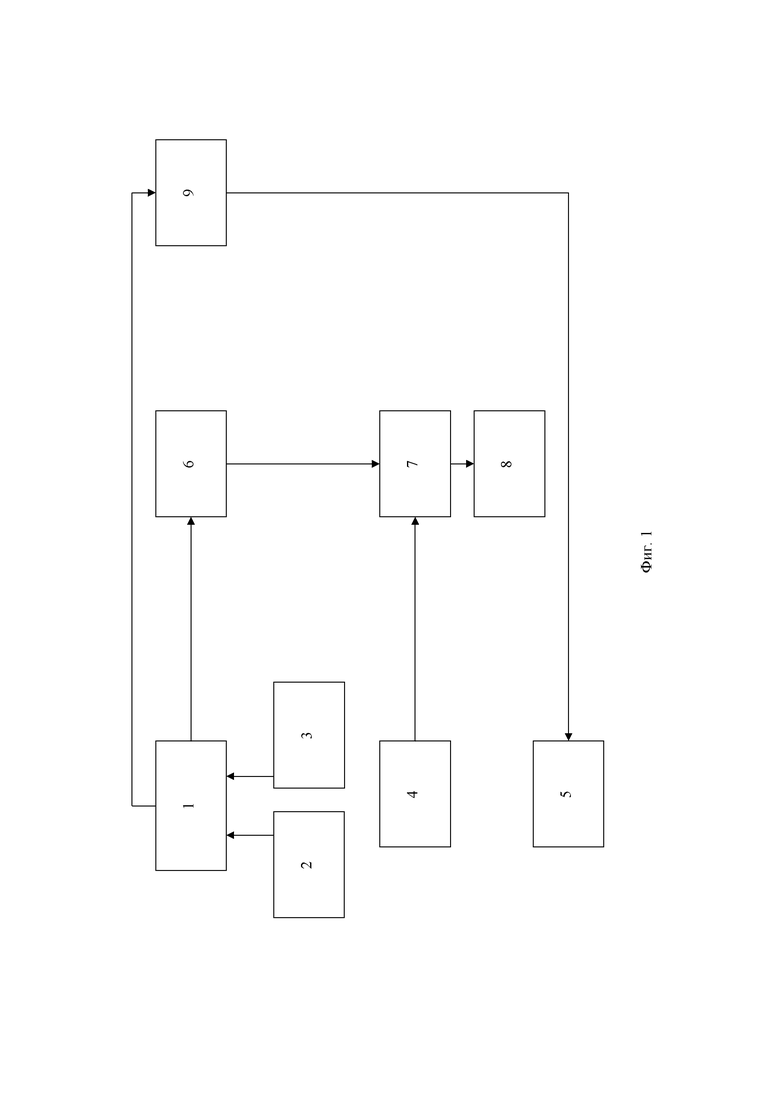
Способ управления посадкой ЛА на корабль, заключающийся в том, что в посадочно-радиолокационном комплексе (ПРЛК) (1) формируют информацию по летательному аппарату (ЛА), заходящему на посадку по запросу диспетчера посадки (2) и оператора (3) визуальной посадки (ОВП), эту информацию преобразуют в телевизионный растр в формирователе телевизионного растра (6), который затем передают в устройство сложения растров (7), где он складывается с телевизионным растром с выхода оптической системы контроля посадки (4), и затем поступает на АРМ диспетчера (8), оборудованного средствами дополненной реальности (ДР), а также с выхода ПРЛК (1) информацию по ЛА передают на второй формирователь телевизионного растра (9), выход которого соединен с очками ОВП (5), оборудованными средствами ДР. Заявляемый способ обеспечивает достижение следующего технического результата: снижение нагрузки диспетчеров и ОВП и повышение качества управления ЛА.
Работа данных средств поясняется на фиг. 1.
ПРЛК 1 формирует информацию по ЛА, заходящему на посадку, ее состав задается джойстиком диспетчера посадки 2 и джойстиком ОВП 3. Эти данные преобразуются в телевизионный растр в формирователе телевизионного растра 6, который затем поступает в устройство сложения растров 7, где складывается с телевизионным растром с выхода оптической системы контроля посадки 4 и затем поступает на АРМ диспетчера с ДВР 8. Также с выхода ПРЛК 1 информация по ЛА поступает на второй формирователь телевизионного растра 9, выход которого соединен с очками ОВП с ДВР 5.
Единый растр поступает на АРМ диспетчера с ДВР для отображения.
Таким образом, диспетчер, находясь в помещении командно-диспетчерского пункта (КДП), наблюдает на экране АРМ видеоизображение самолета, заходящего на посадку, его положение и движения по крену и тангажу, при этом на периферии экрана индикатора будут отображаться данные по ЛА от ПРЛК (шкалы, таблицы, графики и др.)
ОВП через очки свободно наблюдает реальный процесс посадки, а на периферии очков отображаются данные ЛА от ПРЛК.
Такое построение средств отображения позволит снизить нагрузку диспетчеров и ОВП и повысить качество управления ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| Способ обеспечения инструментального захода на посадку корабельных вертолетов | 2023 |
|
RU2816394C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2067951C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2483986C2 |
| Интегрированная автоматизированная система контроля и управления средствами поисково-спасательного обеспечения спускаемых космических аппаратов | 2017 |
|
RU2668145C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
Способ заключается в том, что посадочно-радиолокационный комплекс (ПРЛК) (1) формирует информацию по ЛА, заходящему на посадку по запросу диспетчера посадки (2) и оператора (3) визуальной посадки (ОВП). Эта информация преобразуется в телевизионный растр в формирователе телевизионного растра (6), который затем поступает в устройство сложения растров (7), где складывается с телевизионным растром с выхода оптической системы контроля посадки (4), и затем поступает на АРМ диспетчера (8), оборудованного средствами дополненной виртуальной реальности (ДВР). Также с выхода ПРЛК (1) информация по ЛА поступает на второй формирователь телевизионного растра (9), выход которого соединен с очками ОВП (5), оборудованными средствами ДВР. Обеспечивается повышение качества управления ЛА. 1 ил.
Способ управления посадкой ЛА на корабль, заключающийся в том, что в посадочно-радиолокационном комплексе (ПРЛК) (1) формируют информацию по летательному аппарату (ЛА), заходящему на посадку по запросу диспетчера посадки (2) и оператора (3) визуальной посадки (ОВП), эту информацию преобразуют в телевизионный растр в формирователе телевизионного растра (6), который затем передают в устройство сложения растров (7), где он складывается с телевизионным растром с выхода оптической системы контроля посадки (4), и затем поступает на АРМ диспетчера (8), оборудованного средствами дополненной реальности (ДР), а также с выхода ПРЛК (1) информацию по ЛА передают на второй формирователь телевизионного растра (9), выход которого соединен с очками ОВП (5), оборудованными средствами ДР.
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОСАДКОЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2518434C2 |
| FR 3046226 A1, 30.06.2017 | |||
| US 20220398929 A1, 15.12.2022 | |||
| ИНТЕЛЛЕКТУАЛЬНЫЙ ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ | 2019 |
|
RU2729891C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| УСТРОЙСТВО ДЛЯ ПОМОЩИ В ПИЛОТИРОВАНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ВО ВРЕМЯ ЭТАПА ЗАХОДА НА ПОСАДКУ С ЦЕЛЬЮ ПРИЗЕМЛЕНИЯ | 2007 |
|
RU2381563C1 |

