Изобретение относится к военной технике, а именно к робототехническим комплексам для эвакуации раненных в боевых условиях.
Известен армейский мотовездеход типа АМ1-10, с колесной формулой 6х4, выполненный в безэкипажном исполнении и управляемый дистанционно и предназначенный для решения комплекса военных задач, в перечень которых входит эвакуация раненных с поля боя (https://topwar.ru/103864-armeyskiy-motovezdehod-am-1.html?ysclid=lie20u54tb423390746).
Недостатком известного дистанционно-управляемого мотовездехода типа АМ1-10 является отсутствие в его штатной комплектации специализированного манипуляторного устройства, обеспечивающего эвакуацию раненных с поля боя.
Известно устройство для загрузки/выгрузки тележки-каталки в санитарное транспортное средство полезная модель № 167836, A61G1/06, опубл. 10.01.2017, содержащее основание, поворотную раму с продольно подвижной панелью, механизм автоматизированного перемещения тележки-каталки, включающий моноблок электропривода, закрепленный на поворотной раме, силовой строп, один конец которого закреплен на моноблоке электропривода, а другой предназначен для крепления на тележке-каталке, при этом моноблок электропривода выполнен с возможностью получения управляющих сигналов.
Недостатком известного устройства является его малая мобильность, значительные массогабаритные характеристики и необходимость использования экипажа для его применения.
Техническим результатом предложения является разработка высокомобильного, компактного дистанционно применяемого манипуляторного устройства робототехнического комплекса для погрузки раненных и эвакуации их с поля боя.
Технический результат достигается за счет того, что один конец основания прикреплен при помощи шарнира к кормовой части дистанционно-управляемого мотовездехода типа АМ1-10, а второй – соединен с его рамой посредством электроцилиндра, на свободном конце основания установлен зубчатый ролик с электродвигателем, входящий в зацепление с зубчатыми рейками нижней подвижной панели, при этом в левой части нижней подвижной панели установлен аналогичный зубчатый ролик с электродвигателем, входящий в зацепление с зубчатыми рейками верхней подвижной панели, электродвигатели и электроцилиндр соединены их работа синхронизирована электронным блоком управления.
Предложение поясняется рисунком, на котором изображены:
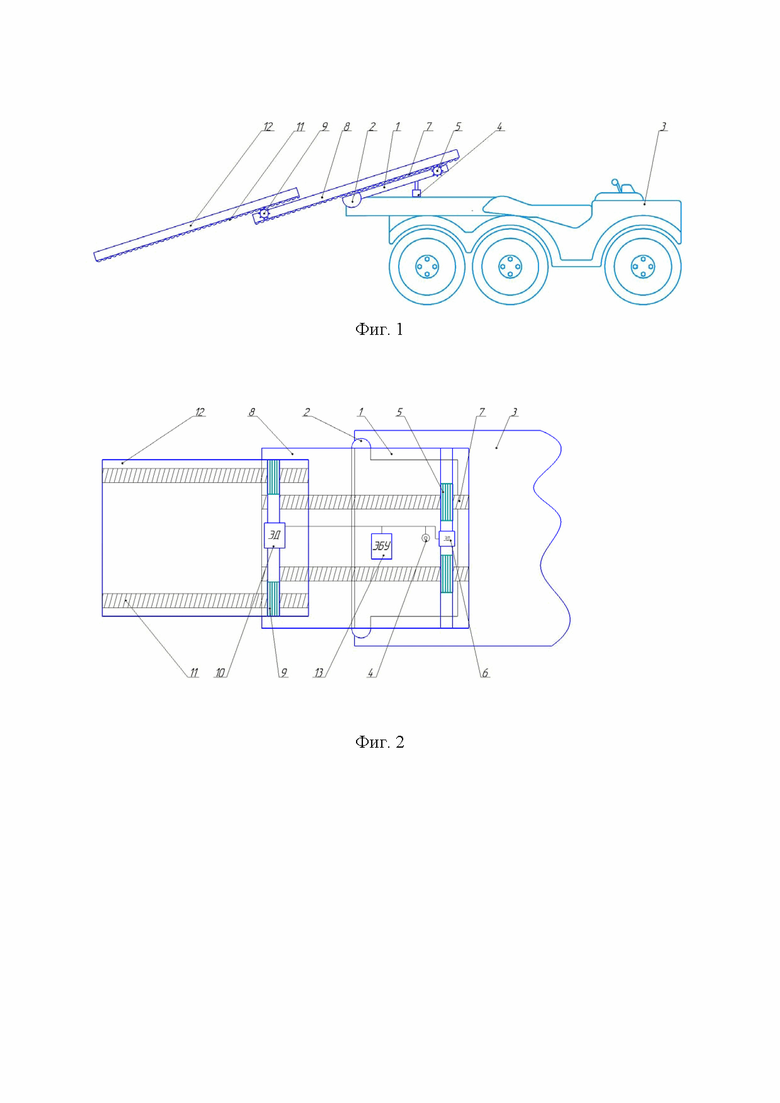
Фиг. 1 - общий вид манипуляторного устройства робототехнического комплекса.
Фиг. 2 – горизонтальная проекция манипуляторного устройства робототехнического комплекса.
Заявленное манипуляторное устройство робототехнического комплекса содержит основание 1 один конец которого прикреплен при помощи шарнира 2 к кормовой части дистанционно-управляемого мотовездехода 3 типа АМ1-10, а второй – соединен с его рамой посредством электроцилиндра 4, на свободном конце основания 1 установлен зубчатый ролик 5 с электродвигателем 6, входящий в зацепление с зубчатыми рейками 7 нижней подвижной панели 8, при этом в левой части нижней подвижной панели 8 установлен аналогичный зубчатый ролик 9 с электродвигателем 10, входящий в зацепление с зубчатыми рейками 11 верхней подвижной панели 12, электродвигатели 6, 10 и электроцилиндр 4 соединены и их работа синхронизирована электронным блоком управления 13.
Манипуляторное устройство робототехнического комплекса работает следующим образом. Оператор через электронный блок управления 13 подает управляющий сигнал на электроцилиндр 4 и электродвигатели 6, 10 которые в свою очередь поднимают основание 1, посредством электроцилиндра 4 и раздвигают и нижнюю, а также верхнюю подвижные панели 8,9 в положение, соответствующее разложенному манипуляторному устройству робототехнического комплекса, посредством вращения зубчатых роликов 5, 9, находящихся в зацеплении с зубчатыми рейками 7, 11. Раненного помещают на верхнюю подвижную панель 12. После погрузки раненного оператор через аналогичные команды складывает манипуляторное устройство робототехнического комплекса, тем самым втаскивая раненного на кормовую часть дистанционно-управляемого мотовездехода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭВАКУАЦИОННЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2023 |
|
RU2824684C1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ СЦЕПКИ ДЛЯ ЭВАКУАЦИИ НАЗЕМНЫХ РОБОТОТЕХНИЧЕСКИХ КОМПЛЕКСОВ ВОЕННОГО НАЗНАЧЕНИЯ | 2024 |
|
RU2825935C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
| МЕДИКО-ЭВАКУАЦИОННЫЙ КОМПЛЕКС (ВАРИАНТЫ) | 2018 |
|
RU2689096C2 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| Агрегат для перемещения лежачих больных - больничный робот | 2018 |
|
RU2724824C2 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
Изобретение относится к военной технике. Манипуляторное устройство робототехнического комплекса содержит основание, продольные подвижные панели, блок приводов с возможностью получения управляющих сигналов. Один конец основания выполнен с возможностью закрепления при помощи шарнира к кормовой части дистанционно-управляемого мотовездехода АМ1-10, а второй – с возможностью соединения с его рамой посредством электроцилиндра. На свободном конце основания установлен зубчатый ролик с электродвигателем, входящий в зацепление с зубчатыми рейками нижней подвижной панели. В левой части нижней подвижной панели установлен аналогичный зубчатый ролик с электродвигателем, входящий в зацепление с зубчатыми рейками верхней подвижной панели. Электродвигатели и электроцилиндр соединены и управляются электронным блоком управления. Повышается мобильность, компактность, для погрузки раненных и эвакуации их с поля боя. 2 ил.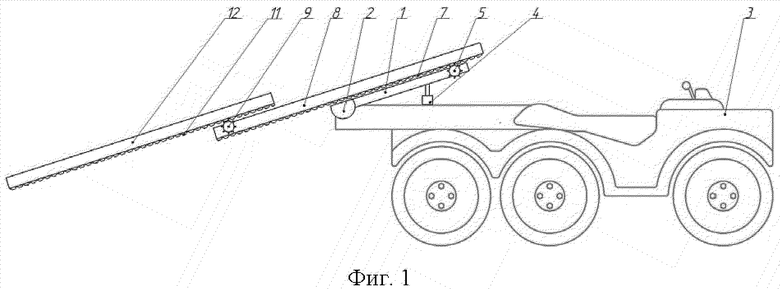
Манипуляторное устройство робототехнического комплекса, содержащее основание, продольные подвижные панели, блок приводов с возможностью получения управляющих сигналов, отличающееся тем, что один конец основания выполнен с возможностью закрепления при помощи шарнира к кормовой части дистанционно-управляемого мотовездехода АМ1-10, а второй – с возможностью соединения с его рамой посредством электроцилиндра, на свободном конце основания установлен зубчатый ролик с электродвигателем, входящий в зацепление с зубчатыми рейками нижней подвижной панели, при этом в левой части нижней подвижной панели установлен аналогичный зубчатый ролик с электродвигателем, входящий в зацепление с зубчатыми рейками верхней подвижной панели, электродвигатели и электроцилиндр соединены и управляются электронным блоком управления.
| WO 1998044991 A1, 15.10.1998 | |||
| US 8807619 B2, 19.08.2014 | |||
| СМЕННАЯ ПЛАТФОРМА И СРЕДСТВО ТРАНСПОРТИРОВКИ СМЕННОЙ ПЛАТФОРМЫ | 2013 |
|
RU2617768C2 |
| US 20050036869 A1, 17.02.2005 | |||
| WO 2009096973 A1, 06.08.2009 | |||
| Приспособление для выбирания невода | 1930 |
|
SU27542A1 |
| Способ изготовления строительного гипса | 1947 |
|
SU73705A1 |

