ОБЛАСТЬ ТЕХНИКИ
[01] Настоящее изобретение относится к автоматизированной системе разборки батарей. Более конкретно, настоящее изобретение относится к способу автоматизированной разборки блока батарей или модуля батарей, используемого в электрическом транспортном средстве или устройстве для хранения энергии.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[02] В последнее время литий-ионная батарея используется в электрических транспортных средствах и может состоять из четырех элементов, то есть материала катода, материала анода, электролита и разделителя батареи. В зависимости от материала, используемого в качестве материала катода, используются никелевая тройная батарея (Li-Co или Li-Mn) и литий-железо-фосфатная батарея, в которой используется железо вместо кобальта. Ожидается, что для снижения опасности возгорания электролита будут использоваться различные батареи, включая полностью твердотельную батарею.
[03] На вторичные батареи приходится 30 % углеродного следа электрических транспортных средств в течение жизненного цикла. Металлические материалы, такие как никель, кобальт и марганец, имеют высокий углеродный след. Большая часть углерода образуется в процессе добычи и очистки сырья. Повторное использование и переработка вторичных батарей могут внести большой вклад в сокращение выбросов парниковых газов для перехода к углеродно-нейтральному обществу к 2050 году.
[04] В будущем, поскольку количество отработанных батарей, выбрасываемых после нескольких лет использования, увеличивается с ростом рынка электрических транспортных средств, индустрия переработки батарей для переработки и повторного использования отработанных батарей будет расширяться. Путем восстановления и переработки ценных металлов (никель, кобальт, марганец, медь, литий и т. д.), необходимых для производства батарей путем такой переработки батарей, можно не только добиться переработки ресурсов и получения экономической выгоды, но и уменьшить загрязнение окружающей среды, вызванное процессом сбора металла.
[05] Обычно для переработки и повторного использования отработанного блока батарей работник должен непосредственно разобрать блок батарей с использованием инструмента, извлечь и разрядить модуль батарей. При этом разрядку батареи осуществляют с использованием соленой воды. В этом способе разрядки с использованием соленой воды используют соленую воду, полученную путем разбавления хлорида натрия (NaCl) или хлорида кальция (CaCl2) водой в концентрации от 3 % до 3,5 %. Способ разрядки с использованием соленой воды занимает много времени от по меньшей мере 8 часов до 10 дней или более. Следует соблюдать осторожность, поскольку в процессе разрядки с использованием соленой воды могут произойти пожары и взрывы. Утечка тяжелых металлов и обработка сточных вод могут привести к высоким затратам и могут требовать большого рабочего места. Модуль батарей, разряженный с использованием соленой воды, необходимо высушить, а затем снова непосредственно разобрать для извлечения батарейных элементов.
[06] Поскольку большинство обычных способов переработки блоков батарей, описанных выше, выполняют вручную, они очень неэффективны и отнимают много времени. Кроме того, для работ по разборке требуется большое количество людей и существует высокий риск воздействия на работников вредной окружающей среды, что может вызвать различные проблемы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[07] Задачей настоящего изобретения является предоставление автоматизированной системы разборки батарей, способной решать вышеуказанные проблемы.
[08] Согласно одному варианту осуществления автоматизированная система разборки батарей содержит: рабочую станцию, содержащую первый рабочий стол, второй рабочий стол, третий рабочий стол и рабочий стол для разрядки; устройство для разрядки; робототехническое устройство; перемещающее устройство; и контроллер, электрически соединенный с робототехническим устройством и перемещающим устройством, при этом контроллер выполнен с возможностью управления робототехническим устройством для того, чтобы: когда блок батарей расположен на первом рабочем столе, отделять верхнюю крышку от блока батарей; когда блок батарей расположен на рабочем столе для разрядки, разряжать блок батарей путем соединения блока батарей с устройством для разрядки; когда разряженный блок батарей расположен на втором рабочем столе, отделять модуль батарей от разряженного блока батарей; и, когда модуль батарей расположен на третьем рабочем столе, отделять батарейные элементы от модуля батарей.
[09] Контроллер может быть выполнен с возможностью управления перемещающим устройством для того, чтобы: после отделения верхней крышки от блока батарей и перед разрядкой блока батарей перемещать блок батарей, который расположен на первом рабочем столе и от которого отделена верхняя крышка, на рабочий стол для разрядки; после разрядки блока батарей и перед отделением модуля батарей от разряженного блока батарей перемещать разряженный блок батарей, расположенный на рабочем столе для разрядки, на второй рабочий стол; и после отделения модуля батарей от разряженного блока батарей и перед отделением батарейных элементов от модуля батарей перемещать модуль батарей, расположенный на втором рабочем столе, на третий рабочий стол.
[010] Система может дополнительно содержать: устройство пожаротушения, содержащее бак для воды, подсоединенный к контроллеру и выполненный с возможностью заполнения водой для пожаротушения, при этом контроллер может быть выполнен с возможностью управления устройством пожаротушения для размещения блока батарей, расположенного на рабочей станции, в баке для воды.
[011] Система может дополнительно содержать: видеосистему, электрически подсоединенную к контроллеру, при этом контроллер может быть выполнен с возможностью разборки компонентов блока батарей, расположенного на рабочей станции, путем управления робототехническим устройством на основании данных, полученных посредством видеосистемы.
[012] Система может дополнительно содержать: контейнер для хранения, при этом контроллер может быть выполнен с возможностью управления робототехническим устройством для перемещения компонентов, отделенных от блока батарей, в контейнер для хранения.
[013] Устройство для разрядки может содержать разрядник и короткозамыкающее разрядное приспособление, и контроллер может быть выполнен с возможностью управления робототехническим устройством для соединения блока батарей, расположенного на рабочем столе для разрядки, с разрядником для разрядки блока батарей, а затем управления робототехническим устройством для соединения блока батарей с короткозамыкающим разрядным приспособлением для короткого замыкания и разрядки блока батарей.
[014] Контроллер может быть выполнен с возможностью разрядки блока батарей с использованием разрядника в течение от 1 часа до 4 часов согласно остаточной энергии блока батарей, так что напряжение блока батарей составляет 30 В или меньше, и разрядки блока батарей с использованием короткозамыкающего разрядного приспособления, так что напряжение блока батарей составляет 0,2 В или меньше.
[015] Модуль батарей может содержать множество батарейных элементов, расположенных в первом направлении, каждый из батарейных элементов может содержать корпус, проходящий в продольном направлении, перпендикулярном первому направлению, и выводы электрода, проходящие от продольных концов корпуса, и отделение батарейных элементов от модуля батарей может включать разрезание модуля батарей вдоль линии, параллельной первому направлению, и прохождение над выводами электрода, если смотреть на модуль батарей сверху.
[016] Автоматизированная система разборки батарей согласно настоящему изобретению способна минимизировать потребность в работниках во время работ по разборке отработанной батарей, автоматически разбирать и отделять блок батарей и модуль батарей с использованием робототехнического устройства и устройства автоматизации, предотвращать воздействие вредных сред на работников, улучшать возможность разборки отработанной батареи и минимизировать количество работников. Кроме того, автоматизированная система разборки батарей согласно настоящему изобретению способна повысить производительность при разборке батарей.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[017] На фиг. 1 представлена схема конфигурации автоматизированной системы разборки батарей согласно одному варианту осуществления.
[018] На фиг. 2 представлен вид в плане автоматизированной системы разборки батарей согласно одному варианту осуществления.
[019] На фиг. 3 представлен вид сбоку автоматизированной системы разборки батарей, показанной на фиг. 2.
[020] На фиг. 4 представлена блок-схема способа автоматизированной разборки батарей согласно одному варианту осуществления.
[021] На фиг. 5 представлен вид, на котором показан процесс обнаружения пожара, выполняемый на каждом рабочем столе.
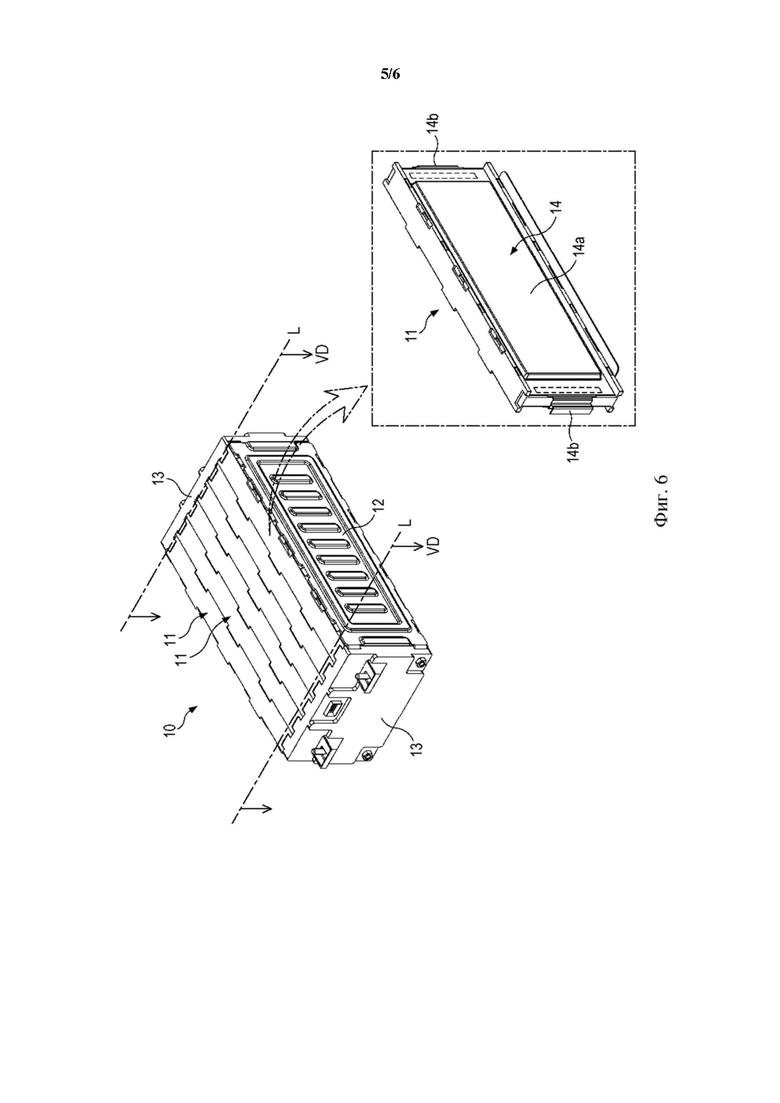
[022] На фиг. 6 проиллюстрирован способ разборки для модуля батарей в одном варианте осуществления.
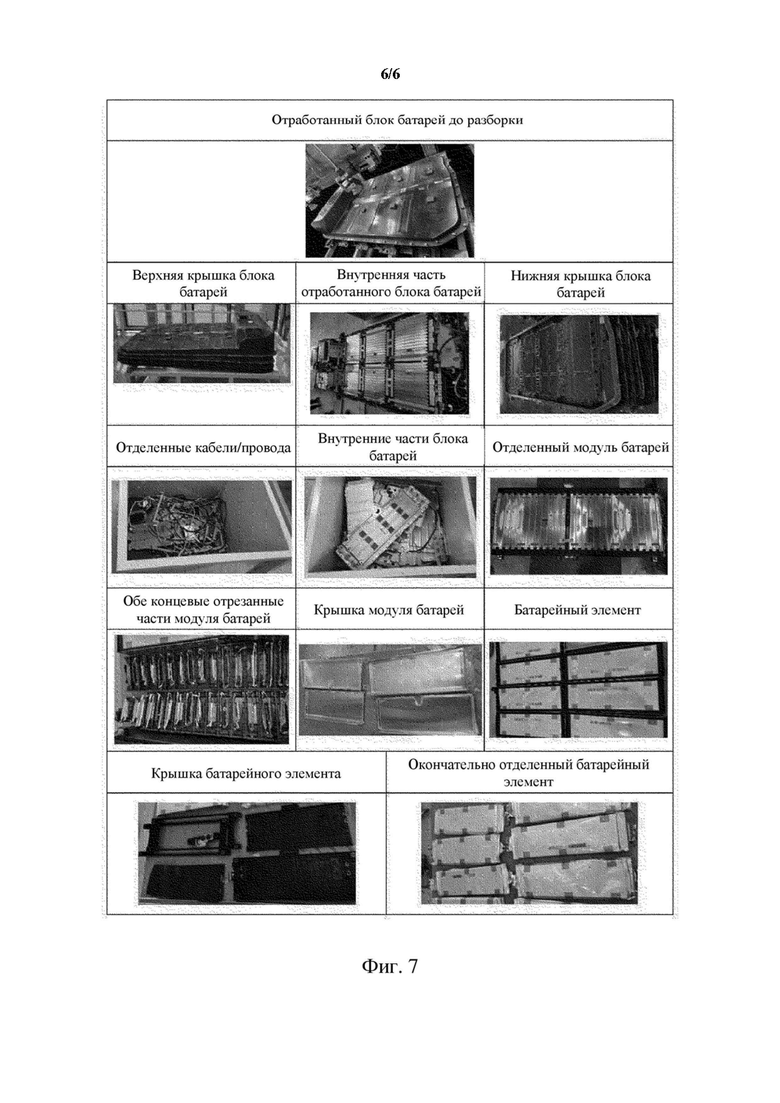
[023] На фиг. 7 показаны фотографии компонентов, отделенных с помощью автоматизированной системы разборки батарей.
ПОДРОБНОЕ ОПИСАНИЕ
[024] Варианты осуществления настоящего изобретения проиллюстрированы для описания технического объема настоящего изобретения. Объем формулы изобретения согласно настоящему изобретению не ограничивается вариантами осуществления, описанными ниже, или подробными описаниями этих вариантов осуществления.
[025] Все технические или научные термины, используемые в настоящем документе, имеют значения, которые обычно понятны специалисту в данной области техники, к которой относится настоящее изобретение, если не указано иное. Термины, используемые в настоящем документе, выбраны только для более четкой иллюстрации настоящего изобретения и не предназначены для ограничения объема формулы изобретения в соответствии с настоящим изобретением.
[026] Используемые в настоящем документе выражения «содержать», «снабженный», «иметь» и т. п. следует понимать как неограничивающие термины, обозначающие возможность включения других вариантов осуществления, если иное не упомянуто в фразе или предложении, содержащем данные выражения.
[027] Выражение в единственном числе может включать значения множественности, если не указано иное, и то же самое применяется к выражению в единственном числе, указанному в формуле изобретения.
[028] Термины «первый», «второй» и т. д., используемые в настоящем документе, используются для идентификации множества компонентов друг от друга и не предназначены для ограничения порядка или важности соответствующих компонентов.
[029] Когда определенный компонент описан как «соединенный с» или «подсоединенный к» другому компоненту, это следует понимать как имеющее значение, что определенный компонент может быть соединен или подсоединен непосредственно к другому компоненту или что определенный компонент может быть соединен или подсоединен к другому компоненту через новый промежуточный компонент.
[030] Далее в настоящем документе будут описаны варианты осуществления настоящего изобретения со ссылкой на графические материалы. В прилагаемых графических материалах аналогичные или соответствующие компоненты обозначены аналогичными позиционными обозначениями. В нижеследующем описании вариантов осуществления повторяющиеся описания идентичных или соответствующих компонентов будут опущены. Однако, даже если описание компонента опущено, не предполагается, что такой компонент исключен из варианта осуществления.
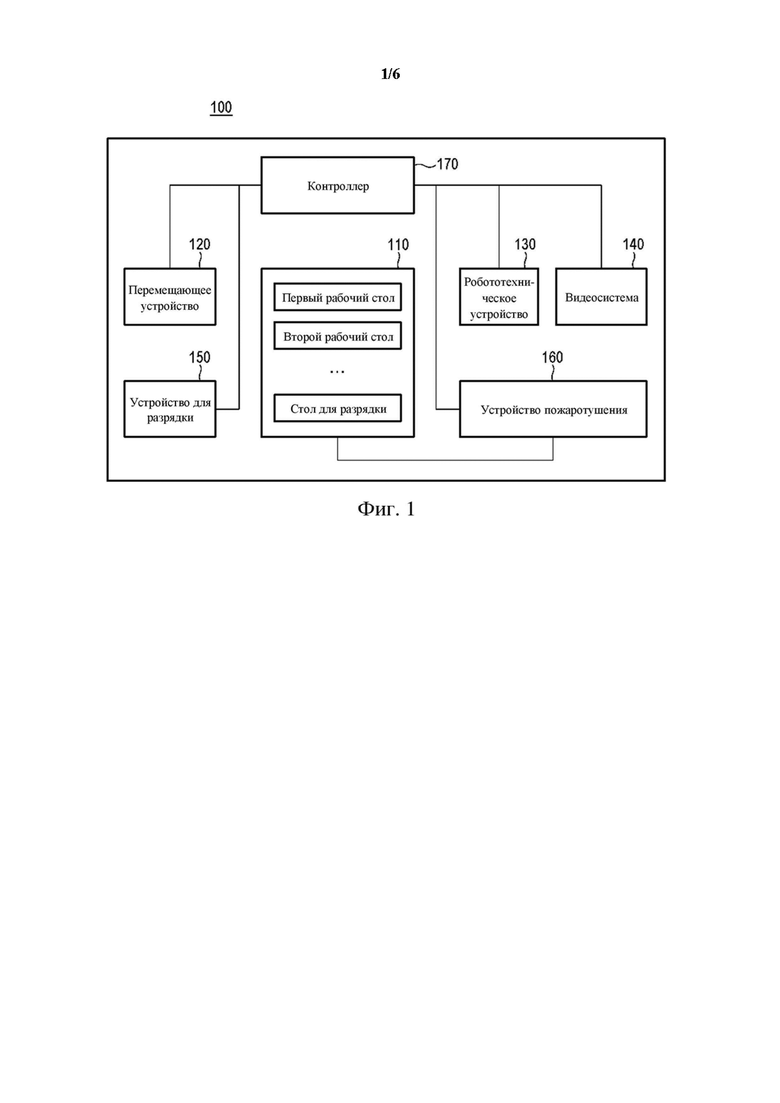
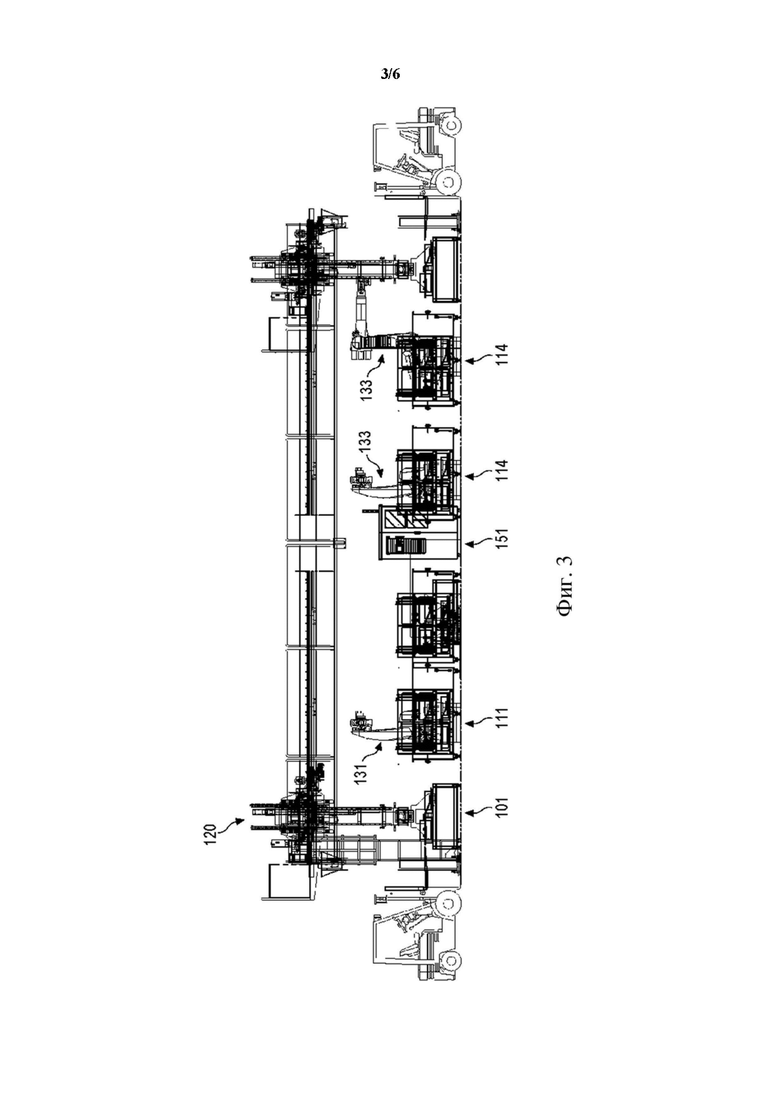
[031] На фиг. 1 представлена схема конфигурации автоматизированной системы 100 разборки батарей согласно одному варианту осуществления. На фиг. 2 представлен вид в плане автоматизированной системы 100 разборки батарей согласно одному варианту осуществления. На фиг. 3 представлен вид сбоку автоматизированной системы 100 разборки батарей, показанной на фиг. 2.
[032] Автоматизированная система 100 разборки батарей выполнена с возможностью разборки блока батарей, используемого в электрическом транспортном средстве или т. п. Блок батарей разбирают для переработки или повторного использования компонентов внутри блока батарей. Путем извлечения батарейных элементов из блока батарей материалы, из которых состоят батарейные элементы, могут быть восстановлены и переработаны. Альтернативно батарейные элементы, извлеченные из блока батарей, могут быть повторно использованы для других целей. Например, система хранения энергии (ESS) может использовать батарейные элементы, отделенные от блока батарей, используемого в электрическом транспортном средстве.
[033] Автоматизированная система 100 разборки батарей содержит рабочую станцию 110, перемещающее устройство 120 и робототехническое устройство 130.
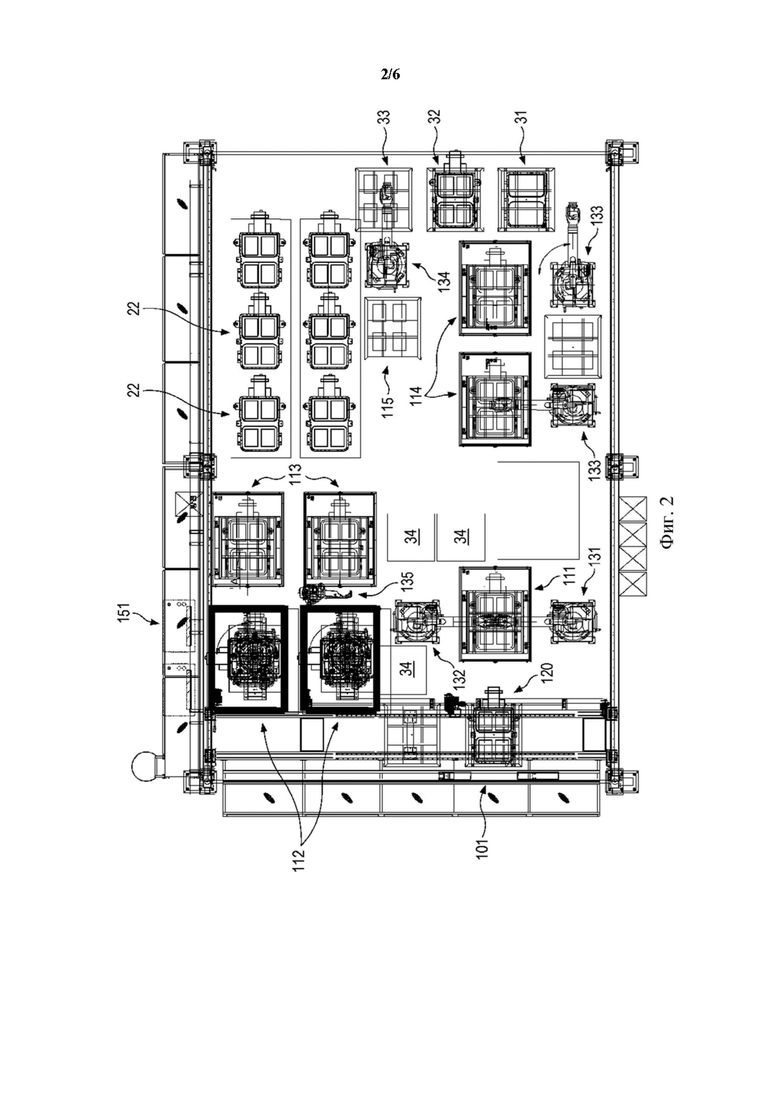
[034] Рабочая станция 110 выполнена с возможностью расположения на ней блока батарей. Автоматизированная система 100 разборки батарей может содержать два или более рабочих стола. Например, как показано на фиг. 2, рабочая станция может содержать множество рабочих столов 111, 112, 113, 114 и 115. В настоящем изобретении рабочая станция 110 может относиться к каждому или ко всем из множества рабочих столов 111, 112, 113, 114 и 115.
[035] Разные процессы могут быть выполнены на разных рабочих столах. Например, когда блок батарей расположен на первом рабочем столе 111, верхняя крышка блока батарей может быть демонтирована, и, когда блок батарей расположен на втором рабочем столе 114, батарейные элементы могут быть отделены от модуля батарей.
[036] Рабочая станция 110 может содержать рабочие столы 112 и 113 для разрядки. Рабочие столы для разрядки представляют собой рабочие столы, на которых располагают блок батарей в процессе разрядки блока батарей. Блок батарей, перемещенный на рабочие столы для разрядки, может быть подсоединен к устройству 150 для разрядки, и тем самым блок батарей может быть разряжен.
[037] Рабочая станция 110 может содержать первый рабочий стол 112 для разрядки, выполненный в виде конструкции в виде поворотного стола и выполненный с возможностью вращения. Первый рабочий стол 112 для разрядки может вращать блок батарей в положение или направление, подходящее для разрядки. Хотя соединители для разрядки в блоках батарей могут быть расположены по-разному в зависимости от производителя и типа модели, с различными типами блоков батарей можно обращаться, используя выполненный с возможностью вращения первый рабочий стол 112 для разрядки.
[038] Второй рабочий стол 113 для разрядки может быть использован в качестве места ожидания для блока батарей, разряженного разрядником 151 перед перемещением блока батарей на короткозамыкающую разрядную стойку 22. В другом варианте осуществления рабочая станция 110 может содержать второй рабочий стол 113 для разрядки, предназначенный для блока батарей конкретной модели.
[039] Автоматизированная система 100 разборки батарей может содержать два или более первых рабочих столов 112 для разрядки и два или более вторых рабочих столов 113 для разрядки. Как показано на фиг. 2, могут быть предусмотрены два первых рабочих стола 112 для разрядки и два вторых рабочих стола 113 для разрядки.
[040] Наряду с процессом разрядки блока батарей, другие процессы также могут быть выполнены на рабочих столах 112 и 113 для разрядки. Например, после размещения блока батарей на рабочих столах 112 и 113 для разрядки и перед разрядкой блока батарей робототехническое устройство 130 может отделять и удалять систему управления батареями (BMS) из блока батарей.
[041] Перемещающее устройство 120 выполнено с возможностью перемещения блока батарей на рабочую станцию 110 или перемещения блока батарей, расположенного на рабочей станции 110, в другое местоположение. Перемещающее устройство 120 может содержать опорную раму и приспособление, установленное на опорной раме. Перемещающее устройство 120 может зажимать блок батарей или компонент (например, модуль батарей) внутри блока батарей с использованием приспособления, установленного на опорной раме, и затем может перемещать блок батарей в другое местоположение. Например, перемещающее устройство 120 может перемещать блок батарей, расположенный на первом рабочем столе 111, на первый рабочий стол 112 для разрядки. В качестве другого примера, перемещающее устройство 120 может перемещать модуль батарей внутри блока батарей, расположенного на первом рабочем столе 111, на второй рабочий стол 114.
[042] Робототехническое устройство 130 представляет собой устройство для разборки блока батарей и может быть выполнено с возможностью разборки и отделения компонентов блока батарей от блока батарей. Например, робототехническое устройство 130 может разбирать блок батарей, используя руку робота и различные инструменты (например, отвертку для болтов, лазерный режущий аппарат, щипцы, пилу и т. д.), установленные на руке робота. Инструмент для лазерной резки, инструмент для работы с болтовыми соединениями, инструмент для разрезания кабеля, инструмент для работы с крышкой, инструмент для работы с ломом, инструмент для работы с кабелем и т. п. предусмотрены вокруг робототехнического устройства 130. Робототехническое устройство 130 может заменять инструмент, соединенный с рукой робота, по мере необходимости. Робототехническое устройство 130 может устанавливать другие компоненты на блоке батарей. Например, робототехническое устройство 130 может устанавливать разрядное приспособление на блоке батарей. Блок батарей, на котором установлено разрядное приспособление, может быть подсоединен к разряднику и может быть разряжен.
[043] Робототехническое устройство 130 может быть выполнено с возможностью перемещения компонентов, отделенных от блока батарей, в другое местоположение. Робототехническое устройство 130 может перемещать компоненты (верхнюю крышку, нижнюю крышку, элемент батареи и т. д.), разобранные из блока батарей, в контейнеры для хранения (например, контейнер 31 для хранения верхней крышки, контейнер 32 для хранения нижней крышки, контейнер 33 для элементов и контейнер 34 для разборки).
[044] Для быстрой и эффективной разборки блока батарей может быть предусмотрено множество робототехнических устройств 130. Например, робототехническое устройство 130 содержит первый робот 131 и второй робот 132, выполненные с возможностью выполнения работ на объекте, расположенном на первом рабочем столе 111, третий робот 133, выполненный с возможностью выполнения работ на объекте, расположенном на втором рабочем столе 114, четвертый робот 134, выполненный с возможностью выполнения работ на объекте, расположенном на третьем рабочем столе 115, и пятый робот 135, выполненный с возможностью выполнения работ на объекте, расположенном на рабочих столах 112 и 113 для разрядки. Расположение и количество роботов, показанных на фиг. 2, являются не более чем примерами. В других вариантах осуществления роботы могут быть расположены в другом количестве или в других местоположениях.
[045] Автоматизированная система 100 разборки батарей может содержать видеосистему 140. Видеосистема 140 может обеспечивать информацию, необходимую для управления перемещением робототехнического устройства 130, связанным с робототехническим устройством 130. Автоматизированная система 100 разборки батарей может управлять робототехническим устройством 130 на основании данных, полученных с помощью видеосистемы 140, для разборки компонентов блока батарей, расположенного на рабочей станции 110.
[046] Видеосистема 140 захватывает изображения объекта робототехнического устройства 130 с помощью камеры, так что робототехническое устройство 130 может точно выполнять работы (например, откручивать болты для снятия крышки блока батарей, перерезать кабель внутри блока батарей, разрезать модуль батарей и т. д.) на объекте. Кроме того, тип блока батарей может быть проверен с использованием видеосистемы 140, и робототехническое устройство 130 может повторно выполнить необходимые работы на основании результата проверки.
[047] Видеосистема 140 может быть предусмотрена для каждого робототехнического устройства 130 или для каждого рабочего стола. Например, видеосистема 140 может быть предусмотрена в каждом из множества робототехнических устройств 130, предусмотренных в автоматизированной системе 100 разборки батарей. На фиг. 1 робототехническое устройство 130 и видеосистема 140 показаны в виде отдельных блоков для удобства описания. Однако видеосистема 140 может быть предусмотрена как часть робототехнического устройства 130. Если не указано иное, следует понимать, что работы по разборке и отделению блока батарей или модуля батарей робототехническим устройством 130 выполняют с использованием видеосистемы 140.
[048] Автоматизированная система 100 разборки батарей может содержать устройство 150 для разрядки. Блок батарей можно безопасно разобрать путем разрядки блока батарей перед отделением компонентов внутри блока батарей (например, модулей батарей, батарейных элементов и системы управления батареями (BMS)). Устройство 150 для разрядки может содержать разрядник 151 для принудительной разрядки блока батарей и короткозамыкающее разрядное приспособление, выполненное с возможностью короткого замыкания блока батарей. Короткозамыкающее разрядное приспособление представляет собой приспособление, состоящее из токопроводящей шины и кабеля, и выполнено с возможностью короткого замыкания (+) клеммы и (-) клеммы блока батарей. Короткозамыкающее разрядное приспособление может быть установлено на блоке батарей с помощью робототехнического устройства 130.
[049] Автоматизированная система 100 разборки батарей может содержать устройство 160 пожаротушения. Устройство 160 пожаротушения может тушить пожар, когда возникает пожар в блоке батарей, расположенном на рабочей станции 110. Устройство 160 пожаротушения содержит бак для воды, выполненный с возможностью заполнения водой для пожаротушения, так что рабочая станция может быть размещена в баке для воды при возникновении пожара. Пожар можно потушить путем размещения рабочей станции 110 в баке для воды, заполненным водой. Размещение рабочей станции 110 в баке для воды в настоящем изобретении означает, что рабочие столы, составляющие рабочую станцию, входят в бак для воды.
[050] Устройство 160 пожаротушения может содержать датчик обнаружения пожара и может размещать рабочие столы в баке для воды на основании сигнала, полученного через датчик обнаружения пожара. В настоящем изобретении датчик обнаружения пожара является не чем иным, как примером средства обнаружения пожара, и пожар может быть обнаружен компонентом, отличным от датчика обнаружения пожара, предусмотренного в устройстве пожаротушения.
[051] Бак для воды может быть предусмотрен под рабочей станцией 110. Когда пожар возникает в блоке батарей, поршень, поддерживающий рабочие столы, опускается, так что рабочая станция 110 и блок батарей на рабочей станции 110 могут быть погружены в бак для воды. Если пожар продолжается, в бак для воды может быть дополнительно подана низкотемпературная вода для пожаротушения извне. Устройство 160 пожаротушения может содержать дренажную часть для слива воды для пожаротушения в баке для воды наружу. Слитую воду для пожаротушения можно снова охладить и залить в бак для воды. Устройство 160 пожаротушения может содержать датчик температуры. Устройство 160 пожаротушения может измерять температуру воды для пожаротушения в баке для воды, используя датчик температуры, и может подавать низкотемпературную воду для пожаротушения в бак для воды на основании измеренной температуры.
[052] Автоматизированная система 100 разборки батарей содержит контроллер 170. Контроллер 170 управляет операцией управления автоматизированной системой 100 разборки батарей. Например, контроллер 170 может управлять разборкой блока батарей с помощью робототехнического устройства 130, перемещением блока батарей или компонентов блока батарей с помощью перемещающего устройства 120, работой устройства 160 пожаротушения и т. п. Контроллер 170 не ограничивается одним физическим устройством управления и может пониматься как концепция, включающая все устройства управления, задействованные в управлении автоматизированной системой 100 разборки батарей. Например, устройство 160 пожаротушения может содержать свое собственное устройство управления, которое управляет работой устройства 160 пожаротушения, и хотя контроллер 170 показан в виде блока, отдельного от устройства 160 пожаротушения на фиг. 1, можно понять, что контроллер 170 содержит устройство управления для устройства 160 пожаротушения.
[053] Автоматизированная система 100 разборки батарей согласно настоящему изобретению будет описана как используемая в способе или процессе разборки блока батарей. Однако автоматизированную систему разборки батарей можно использовать не только при разборке блока батарей, но и при разборке различных типов устройств для хранения энергии (например, модулей батарей), включая вторичные батареи.
[054] Автоматизированная система 100 разборки батарей, описанная со ссылкой на фиг. 2 и 3, является не более чем примером и может быть реализована в соответствующей форме в зависимости от местоположения, где должна быть установлена система, или типа блока батарей, с которой работает система.
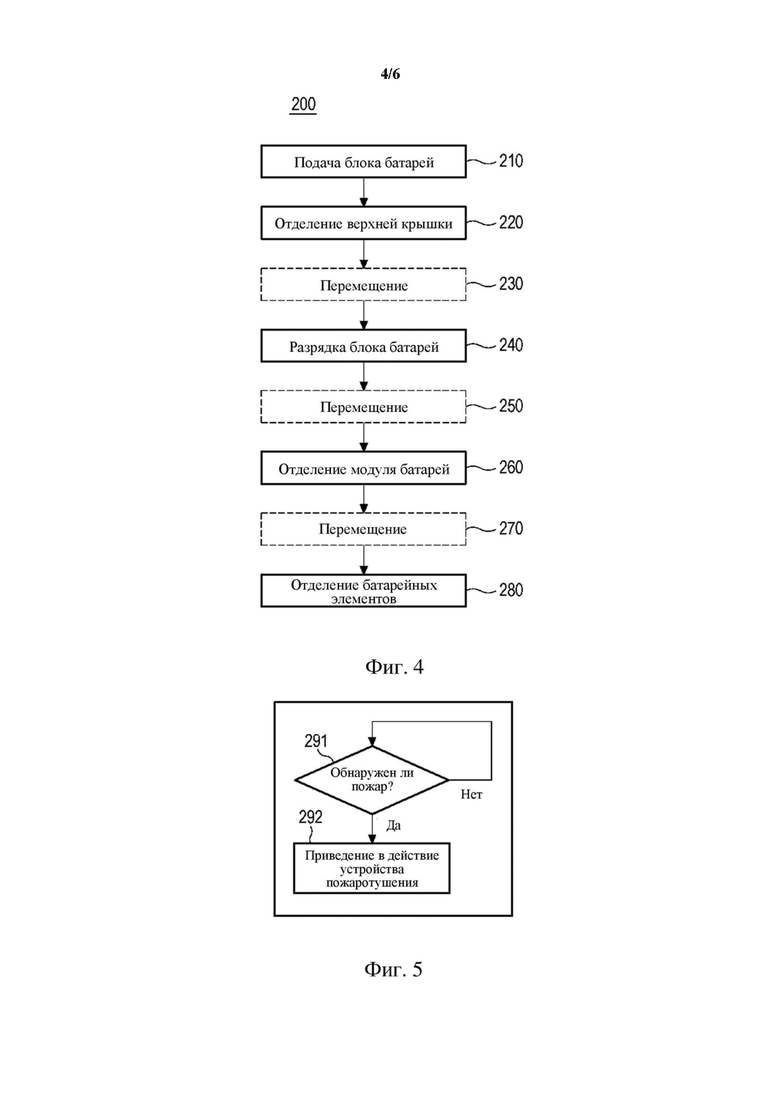
[055] На фиг. 4 представлена блок-схема способа 200 автоматизированной разборки батарей в одном варианте осуществления. На фиг. 5 представлена блок-схема процесса 290 обнаружения пожара, выполняемого на каждом рабочем столе. На фиг. 6 проиллюстрирован способ разборки для модуля батарей в одном варианте осуществления. На фиг. 7 показаны фотографии компонентов, отделенных с помощью автоматизированной системы разборки батарей. Далее в настоящем документе способ 200 автоматизированной разборки батарей будет описан с использованием компонентов автоматизированной системы 100 разборки батарей, показанных на фиг. 1–3. Однако не требуется, чтобы способ 200 автоматизированной разборки батарей, показанный на фиг. 4 и 5, обязательно выполнялся с использованием автоматизированной системы 100 разборки батарей, показанной на фиг. 1–3.
[056] Конкретные операции в способе 200 автоматизированной разборки батарей, описанном ниже, могут быть выполнены контроллером 170 автоматизированной системы 100 разборки батарей. Операциями перемещающего устройства 120, робототехнического устройства 130 и устройства 160 пожаротушения можно управлять с помощью контроллера 170. Например, операция разборки конкретного компонента блока батарей робототехническим устройством 130 может пониматься как то, что контроллер 170 управляет робототехническим устройством 130 для разборки конкретного компонента блока батарей. В качестве другого примера, под операцией перемещения блока батарей с первого рабочего стола 111 на второй рабочий стол 114 перемещающим устройством 120 можно понимать осуществление контроллером 170 управления перемещающим устройством 120 для перемещения блока батарей с первого рабочего стола 111 на второй рабочий стол 114.
[057] Способ 200 автоматизированной разборки батарей может включать этап 210 подачи блока батарей, этап 220 отделения верхней крышки от блока батарей, этап 240 разрядки блока батарей, этап 260 отделения модуля батарей от блока батарей и этап 280 отделения батарейных элементов от модуля батарей. Вышеописанные этапы могут быть выполнены на разных рабочих столах. В этом случае после завершения определенного этапа и перед выполнением последующего этапа блок батарей или модуль батарей может быть перемещен на рабочий стол, где выполняется последующий этап. Однако перемещение между этапами не является существенным. Например, если два разных этапа могут быть выполнены одновременно на одном рабочем столе, перемещение между двумя этапами может быть опущено.
[058] Блок батарей, подаваемый на автоматизированную систему 100 разборки батарей согласно этапу 210 подачи блока батарей, может быть перемещен в зону 101 ожидания и размещен в ней устройством транспортировки (например, автоматизированным управляемым транспортным средством (AGV)). Блок батарей может быть подан в состоянии расположения на поддоне, и устройство транспортировки может перемещать блок батарей и поддон в зону 101 ожидания. Перемещающее устройство 120 перемещает блоки батарей в зоне 101 ожидания на первый рабочий стол 111. Поддон, на котором расположен блок батарей перед подсоединением блока батарей к перемещающему устройству 120, может быть выровнен в определенном положении в зоне 101 ожидания для облегчения перемещения перемещающим устройством 120.
[059] (Отделение верхней крышки)
[060] После того, как перемещающее устройство 120 переместит блок батарей на первый рабочий стол 111, выполняют этап 220 отделения верхней крышки. Когда блок батарей расположен на первом рабочем столе 111, робототехнические устройства 131 и 132 проверяют верхнюю часть блока батарей посредством видеосистемы 140 и используют различные инструменты, такие как отвертка для болтов и лазерный режущий аппарат, чтобы отделить верхнюю крышку от блока батарей. Поскольку блок батарей имеет различные формы в зависимости от производителя или модели, инструмент, предусмотренный в робототехническом устройстве 130, или перемещение робототехнического устройства 130 может быть соответствующим образом определено согласно форме блока батарей. Верхняя крышка, отделенная от блока батарей, может быть перемещена в контейнер 31 для хранения верхней крышки и уложена в него стопкой посредством перемещающего устройства 120.
[061] (Перемещение)
[062] Блок батарей, прошедший этап 220 отделения верхней крышки, подвергают этапу 240 разрядки блока батарей. Поскольку этап 240 разрядки блока батарей выполняют на рабочем столе 112 или 113 для разрядки, может быть выполнен этап 230 перемещения блока батарей с первого рабочего стола на рабочий стол 112 или 113 для разрядки.
[063] (Этап разрядки)
[064] Этап 240 разрядки блока батарей может включать первый этап разрядки с использованием разрядника 151 и второй этап разрядки с использованием короткозамыкающей разрядки, выполняемый после первого этапа разрядки.
[065] После того, как блок батарей, от которого отделена верхняя крышка, переместят на первый рабочий стол 112 для разрядки с помощью перемещающего устройства 120, пятый робот 135 может использовать специальное приспособление для отделения системы управления батареями (BMS) от блока батарей. Пятый робот 135 может использовать видеосистему 140 и специальное приспособление для отделения BMS. При автоматическом отделении пятым роботом 135 BMS может быть перемещена робототехническим устройством 130 в контейнер для хранения BMS и храниться в нем.
[066] Когда отделение BMS завершено, робототехническое устройство 130 может подсоединять блок батарей к разряднику 151 для разрядки блока батарей. Блок батарей подсоединяют к разряднику 151 и разряжают. Робототехническое устройство 130 может подсоединять блок батарей к разряднику 151, используя специальное разрядное приспособление. Блок батарей можно подсоединять к разряднику 151 и разряжать до тех пор, пока блок батарей не перейдет в состояние заряда (SoC), при котором напряжение блока батарей составляет 30 В или меньше. Например, разрядку с использованием разрядника можно выполнять в течение от приблизительно 1 до 4 часов в зависимости от остаточной энергии блока батарей, так что напряжение блока батарей составляет 30 В или меньше. После подсоединения блока батарей к разряднику 151 и проверки состояния заряда остаточная энергия может быть восстановлена и использована в качестве вспомогательного источника питания для системы 100.
[067] Когда блок батарей быстро разряжают с использованием разрядника 151, напряжение блока батарей может снова повыситься до, например, 30 В или больше. В этом случае блок батарей можно снова подсоединять к разряднику 151 и разряжать до тех пор, пока напряжение блока батарей не стабилизируется до 30 В или меньше. Дополнительная разрядка может быть выполнена на втором рабочем столе 113 для разрядки после того, как блок батарей переместят на второй рабочий стол 113 для разрядки.
[068] Блок батарей, изначально разряжаемый разрядником 151, соединяют с короткозамыкающим разрядным приспособлением пятым роботом 135. При соединении с короткозамыкающим разрядным приспособлением, положительная и отрицательная клеммы блока батарей коротко замыкаются друг с другом. В этом состоянии блок батарей может быть перемещен на короткозамыкающую разрядную стойку 22 и установлен на ней с помощью перемещающего устройства 120. Даже если блок батарей разряжают разрядником 151, в блоке батарей остается определенное количество электрической энергии. Следовательно, стабильность последующего этапа разборки может быть обеспечена путем выполнения короткозамыкающей разрядки до тех пор, пока напряжение блока батарей не составит приблизительно 0,2 В или меньше. Блок батарей можно коротко замыкать и разряжать в течение заданного времени, например, от 12 до 24 часов после перемещения на короткозамыкающую разрядную стойку 22. Короткозамыкающая разрядная стойка 22 состоит из, например, шести 4-ярусных выдвижных ящиков. Когда перемещающее устройство 120 перемещает блок батарей, к которому прикреплено короткозамыкающее разрядное приспособление, открывается специальный выдвижной ящик в короткозамыкающей разрядной стойке 22. Перемещающее устройство 120 может помещать блок батарей, оснащенный короткозамыкающим разрядным приспособлением, в открытый выдвижной ящик.
[069] Вышеописанная разрядка может быть выполнена контроллером 190. Контроллер 190 может разряжать блок батарей в течение от 1 часа до 4 часов, используя разрядник 151 согласно остаточной энергии блока батарей, так что напряжение блока батарей составляет 30 В или меньше. Контроллер 190 может дополнительно разряжать блок батарей, используя разрядник 151, когда напряжение блока батарей снова повышается после того, как блок батарей разряжен, используя разрядник 151. Контроллер 190 может разряжать блок батарей, используя короткозамыкающее разрядное приспособление, так что напряжение блока батарей составляет 0,2 В или меньше. Разрядка блока батарей с использованием короткозамыкающего разрядного приспособления означает разрядку блока батарей в состоянии, в котором короткозамыкающее разрядное приспособление соединено с блоком батарей.
[070] После завершения разрядки на первом рабочем столе 112 для разрядки с помощью разрядника 151 блок батарей может быть временно размещен на втором рабочем столе 113 для разрядки, прежде чем он будет перемещен на короткозамыкающую разрядную стойку 22. Короткозамыкающее разрядное приспособление может быть установлено на блоке батарей, когда блок батарей размещен на первом рабочем столе 112 для разрядки или на втором рабочем столе 113 для разрядки.
[071] (Перемещение)
[072] После выполнения этапа 240 разрядки блока батарей блок батарей подвергают этапу 260 отделения модуля батарей. Этап 260 отделения модуля батарей выполняют на первом рабочем столе 111. Соответственно, перед выполнением этапа 260 отделения модуля батарей выполняют этап 250 перемещения блока батарей с рабочего стола 112 или 113 для разрядки на первый рабочий стол 111. Когда разрядка с коротким замыканием завершена на этапе 240 разрядки блока батарей или когда подтверждена полная разрядка блока батарей из-за разрядки с коротким замыканием, перемещающее устройство 120 перемещает разряженный блок батарей с короткозамыкающей разрядной стойки 22 на первый рабочий стол 111.
[073] (Отделение модуля батарей)
[074] Этап 260 отделения модуля батарей от блока батарей может быть выполнен на первом рабочем столе 111. Перед отделением модуля батарей короткозамыкающее разрядное приспособление, которое было соединено с блоком батарей на этапе 240 разрядки блока батарей, может быть удалено робототехническим устройством 130. Удаленное короткозамыкающее разрядное приспособление перемещается в специально отведенное место и хранится в нем.
[075] Когда блок батарей расположен на первом рабочем столе 111, первый робот 131 может проверять компонент, подлежащий разборке, используя видеосистему 140, и может использовать отвертку для болтов и щипцы для разборки и удаления различных болтов, кабелей и т. п., подсоединенных к модулю батарей в блоке батарей. Второй робот 132 может проверять компоненты, подлежащие разборке, с помощью видеосистемы 140, и может разбирать и разрезать кронштейны, пластмассы и т. п., используя станок для лазерной резки и режущий аппарат. Разобранные и разрезанные компоненты могут быть классифицированы по типу и загружены в контейнер 34 для разборки.
[076] Внутри блока батарей модули батарей могут быть расположены в два слоя. В этом случае сначала верхний модуль батарей, расположенный на верхнем слое, может быть отделен от блока батарей, а затем нижний модуль батарей, расположенный на нижнем слое, может быть отделен от блока батарей. После отделения модуля батарей оставшаяся нижняя крышка блока батарей может быть перемещена в контейнер 32 для хранения нижней крышки с помощью перемещающего устройства 120.
[077] Модуль батарей может быть отделен от блока батарей после того, как будут удалены кабели и принадлежности, подсоединенные к модулю батарей, а также компоненты для крепления модуля батарей к блоку батарей.
[078] Перемещающее устройство 120 может зажимать и перемещать модуль батарей на второй рабочий стол 114. Часть модуля батарей, перемещенная на второй рабочий стол 114, может быть разрезана третьим роботом 133. Третий робот 133 может разрезать определенную часть модуля батарей после расположения режущего инструмента в точном положении, используя видеосистему 140.
[079] Третий робот 133 может использовать режущий инструмент (например, вращающуюся пилу) для разрезания обоих концов модуля батарей, так что батарейные элементы, расположенные в модуле батарей, не разрезаются. Например, как показано на фиг. 6, модуль 10 батарей содержит узлы 11 элементов, расположенные в одном направлении. Узел 11 элементов содержит по меньшей мере один батарейный элемент 14. То есть модуль 10 батарей содержит множество батарейных элементов 14, расположенных в одном направлении. Узлы 11 элементов окружены и зафиксированы друг к другу концевой пластиной 12 и рамой 13 крышки. Каждый из батарейных элементов 14 содержит корпус 14а, проходящий в продольном направлении, перпендикулярном направлению расположения батарейных элементов 14, и выводы 14b электрода, проходящие от продольных концов корпуса 14а. Узел электрода расположен внутри корпуса 14а. Узел электрода предусмотрен в виде уложенных пластин положительного электрода, пластин отрицательного электрода и разделителей. Пластина положительного электрода и пластина отрицательного электрода подсоединены к разным выводам 14b электрода. Режущий инструмент, предусмотренный в третьем роботе 133, может разрезать модуль 10 батарей, не разрезая корпус 14а батарейного элемента 14. Например, если смотреть на модуль 10 батарей сверху, режущий инструмент может разрезать модуль 10 батарей в вертикальном направлении (VD) вдоль линии L, проходящей в направлении расположения батарейных элементов 14 и проходящей через внешнюю часть корпуса 14a батарейного элемента 14. Например, если смотреть сверху на модуль 10 батарей, линия L может проходить над выводом 14b электрода батарейного элемента 14. В результате, выводы 14b электрода батарейных элементов 14 могут быть обнажены на поверхности разреза (см. «разрезанную часть модуля батарей» на фиг. 7).
[080] Могут быть предусмотрены один или более вторых рабочих столов 114 и один или более третьих роботов 133. Например, как показано на фиг. 2, могут быть предусмотрены два вторых рабочих стола 114 и два третьих робота 133. Поскольку для разрезания обоих концов модуля батарей требуется относительно много времени, скорость разборки блока батарей может быть увеличена за счет использования двух или более вторых рабочих столов 114 и двух или более третьих роботов 133. Например, при выполнении операции разрезания модуля батарей на одном втором рабочем столе 114, модуль батарей на первом рабочем столе 111 перемещают перемещающим устройством 120 на другой второй рабочий стол 114 и затем разрезают третьим роботом 133, установленным рядом с другим вторым рабочим столом 114.
[081] (Перемещение)
[082] Модуль батарей, отделенный на втором рабочем столе 114, как описано выше, проходит этап 270 перемещения модуля батарей на третий рабочий стол 115 с помощью перемещающего устройства 120.
[083] (Отделение батарейных элементов)
[084] Когда модуль батарей готов на третьем рабочем столе 115, выполняют этап 280 отделения батарейных элементов от модуля батарей. Когда модуль батарей загружен на третий рабочий стол 115 с помощью перемещающего устройства 120, модуль батарей центрируют на третьем рабочем столе 115 и затем зажимают. Модуль батарей, зафиксированный на третьем рабочем столе 115, разбирают с помощью четвертого робота 134. Четвертый робот 134 может проверять цель, подлежащую разборке, с помощью видеосистемы 140 и может использовать вакуумное захватное устройство и приспособление для разборки, установленные на четвертом роботе 134, для удаления пластмасс, алюминиевой крышки для защиты элементов и других ненужных элементов из модуля батарей и отделения батарейных элементов. Батарейные элементы хранят в контейнере 33 для элементов посредством четвертого робота 134. Когда определенное количество батарейных элементов загружают в контейнер 33 для элементов, устройство транспортировки, такое как AGV или т. п., автоматически перемещает контейнер 33 для элементов в пространство для хранения. Контейнеры для хранения (например, контейнер 31 для хранения верхней крышки и контейнер 32 для хранения нижней крышки) для хранения других компонентов, отделенных от блока батарей, также автоматически перемещаются устройством транспортировки в специально отведенное место, когда контейнеры для хранения заполняются определенным количеством других компонентов.
[085] Отделенные батарейные элементы проходят процесс переработки. Например, может быть выполнен процесс извлечения ценных металлов или т. п. из батарейных элементов.
[086] (Обнаружение пожара)
[087] Способ 200 автоматизированной разборки батарей может включать этап 290 обнаружения пожара. При выполнении процесса разборки блока батарей можно обнаруживать, возник ли пожар.
[088] Этап 290 обнаружения пожара включает этап 291 определения того, возник ли пожар в блоке батарей или модуле батарей, расположенном на рабочем столе, при выполнении этапа 220 отделения верхней крышки от блока батарей, этапа 240 разрядки блока батарей, этапа 260 отделения модуля батарей от блока батарей и этапа 280 отделения батарейных элементов от модуля батарей. Если определено, что возник пожар, приводится в действие устройство 160 пожаротушения (292). Например, пожар можно потушить путем погружения рабочего стола в бак для воды.
[089] Согласно настоящему изобретению для переработки отработанной батареи блок батарей и модуль батарей автоматически разбираются с использованием устройств автоматизации, таких как перемещающее устройство 120 и робототехническое устройство 130, вместо ручных операций. В результате, возможна эффективная переработка блока батарей электрического транспортного средства, и возможно предотвращение или сведение к минимуму воздействия на работников опасных веществ, которые могут образовываться во время разборки батареи.
[090] Хотя технический объем настоящего изобретения был описан с помощью примеров, описанных в некоторых вариантах осуществления и проиллюстрированных в прилагаемых графических материалах, следует отметить, что без отступления от объема настоящего изобретения могут производиться различные замены, модификации и изменения, которые могут быть понятны специалистам в области техники, к которой относится настоящее изобретение. Кроме того, следует отметить, что подразумевается, что такие замены, модификации и изменения входят в объем прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический комплекс для обеспечения общественной безопасности | 2020 |
|
RU2757747C1 |
| РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КУРЬЕРСКИЙ КОМПЛЕКС | 2022 |
|
RU2787547C1 |
| МАЛОГАБАРИТНАЯ МОБИЛЬНАЯ РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ | 2018 |
|
RU2685319C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ЛОКАЛИЗАЦИИ И ЛИКВИДАЦИИ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2013 |
|
RU2548828C1 |
| Робот-уборщик и способ очистки | 2019 |
|
RU2775535C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| СПОСОБ ДОСТАВКИ РОБОТЕХНИЧЕСКОГО КОМПЛЕКСА ПОВЫШЕННОЙ ПРОХОДИМОСТИ К МЕСТУ ПОЖАРА И ПРОВЕДЕНИЮ СПАСАТЕЛЬНЫХ РАБОТ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2553016C1 |
| МОБИЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА С НЕСКОЛЬКИМИ СМЕННЫМИ РАБОЧИМИ МОДУЛЯМИ И СПОСОБ УПРАВЛЕНИЯ ЭТОЙ СИСТЕМОЙ | 2006 |
|
RU2313442C1 |
| Многофункциональный робототехнический комплекс предупредительного мониторинга, обнаружения возгораний и управления пожаротушением производственных объектов | 2021 |
|
RU2775482C1 |
Автоматизированная система разборки батарей согласно одному варианту осуществления содержит: рабочую станцию, содержащую первый рабочий стол, второй рабочий стол, третий рабочий стол и рабочий стол для разрядки; устройство для разрядки; робототехническое устройство; перемещающее устройство и контроллер, электрически подсоединенный к робототехническому устройству и перемещающему устройству. Контроллер выполнен с возможностью управления робототехническим устройством для того, чтобы: когда блок батарей расположен на первом рабочем столе, отделять верхнюю крышку от блока батарей; когда блок батарей расположен на рабочем столе для разрядки, разряжать блок батарей путем подсоединения блока батарей к устройству для разрядки; когда разряженный блок батарей расположен на втором рабочем столе, отделять модуль батарей от разряженного блока батарей и, когда модуль батарей расположен на третьем рабочем столе, отделять батарейные элементы от модуля батарей. 7 з.п. ф-лы, 7 ил.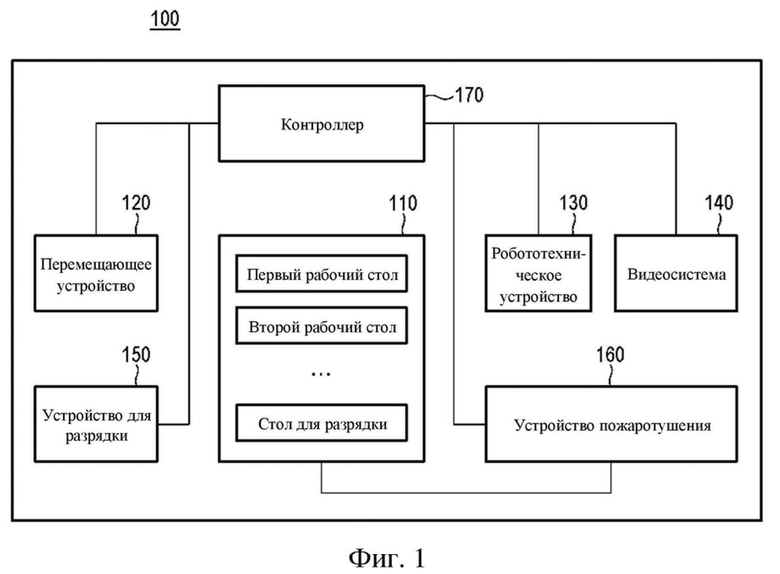
1. Автоматизированная система разборки батарей, содержащая:
рабочую станцию, содержащую первый рабочий стол, второй рабочий стол, третий рабочий стол и рабочий стол для разрядки;
устройство для разрядки;
робототехническое устройство;
перемещающее устройство и
контроллер, электрически подсоединенный к робототехническому устройству и перемещающему устройству,
при этом контроллер выполнен с возможностью управления робототехническим устройством для того, чтобы:
когда блок батарей расположен на первом рабочем столе, отделять верхнюю крышку от блока батарей;
когда блок батарей расположен на рабочем столе для разрядки, разряжать блок батарей путем подсоединения блока батарей к устройству для разрядки;
когда разряженный блок батарей расположен на втором рабочем столе, отделять модуль батарей от разряженного блока батарей и,
когда модуль батарей расположен на третьем рабочем столе, отделять батарейные элементы от модуля батарей.
2. Система по п. 1, отличающаяся тем, что контроллер выполнен с возможностью управления перемещающим устройством для того, чтобы:
после отделения верхней крышки от блока батарей и перед разрядкой блока батарей перемещать блок батарей, который расположен на первом рабочем столе и от которого отделена верхняя крышка, на рабочий стол для разрядки;
после разрядки блока батарей и перед отделением модуля батарей от разряженного блока батарей перемещать разряженный блок батарей, расположенный на рабочем столе для разрядки, на второй рабочий стол; и
после отделения модуля батарей от разряженного блока батарей и перед отделением батарейных элементов от модуля батарей перемещать модуль батарей, расположенный на втором рабочем столе, на третий рабочий стол.
3. Система по п. 1, отличающаяся тем, что дополнительно содержит устройство пожаротушения, содержащее бак для воды, подсоединенный к контроллеру и выполненный с возможностью заполнения водой для пожаротушения,
при этом контроллер выполнен с возможностью управления устройством пожаротушения для размещения блока батарей, расположенного на рабочей станции, в баке для воды.
4. Система по п. 1, отличающаяся тем, что дополнительно содержит видеосистему, электрически подсоединенную к контроллеру,
при этом контроллер выполнен с возможностью разборки компонентов блока батарей, расположенного на рабочей станции, путем управления робототехническим устройством на основании данных, полученных посредством видеосистемы.
5. Система по п. 1, отличающаяся тем, что дополнительно содержит контейнер для хранения,
при этом контроллер выполнен с возможностью управления робототехническим устройством для перемещения компонентов, отделенных от блока батарей, в контейнер для хранения.
6. Система по п. 1, отличающаяся тем, что устройство для разрядки содержит разрядник и короткозамыкающее разрядное приспособление, и
при этом контроллер выполнен с возможностью управления робототехническим устройством для подсоединения блока батарей, расположенного на рабочем столе для разрядки, к разряднику для разрядки блока батарей, а затем управления робототехническим устройством для подсоединения блока батарей к короткозамыкающему разрядному приспособлению для короткого замыкания и разрядки блока батарей.
7. Система по п. 6, отличающаяся тем, что контроллер выполнен с возможностью разрядки блока батарей с использованием разрядника в течение от 1 часа до 4 часов согласно остаточной энергии блока батарей, так что напряжение блока батарей составляет 30 В или меньше, и разрядки блока батарей с использованием короткозамыкающего разрядного приспособления, так что напряжение блока батарей составляет 0,2 В или меньше.
8. Система по п. 1, отличающаяся тем, что модуль батарей содержит множество батарейных элементов, расположенных в первом направлении, причем каждый из батарейных элементов содержит корпус, проходящий в продольном направлении, перпендикулярном первому направлению, и выводы электрода, проходящие от продольных концов корпуса, и
при этом отделение батарейных элементов от модуля батарей включает разрезание модуля батарей вдоль линии, параллельной первому направлению, и прохождение над выводами электрода, если смотреть на модуль батарей сверху.
| KR 102512096 B1, 20.03.2023 | |||
| KR 102409527 B1, 22.06.2022 | |||
| KR 102175706 B1, 06.11.2020 | |||
| Способ разборки отработанных свинцовых аккумуляторных батарей | 2021 |
|
RU2767310C1 |
| JP 2021030431 A, 01.03.2021. | |||
