Устройство относится к электротехнике, а именно к электрическим машинам и измерительной технике и может быть использовано для цифрового управления асинхронным двигателем.
Известно устройство для определения оценки частоты вращения асинхронного двигателя [RU 115984 U1, МПК H02P 23/14 (2006.01), опубл. 10.05.2012], выбранное в качестве прототипа, содержащее датчики фазных токов и фазных напряжений, к первому датчику тока последовательно подключены первый элемент временной задержки, второй элемент временной задержки, третий элемент временной задержки, ко второму датчику тока последовательно подключены четвертый элемент временной задержки, пятый элемент временной задержки, шестой элемент временной задержки, к первому датчику напряжения последовательно подключены седьмой элемент временной задержки, восьмой элемент временной задержки, девятый элемент временной задержки, ко второму датчику напряжения последовательно подключены десятый элемент временной задержки, одиннадцатый элемент временной задержки, двенадцатый элемент временной задержки, выходы датчиков фазных токов и напряжений и элементов временной задержки соединены с искусственной нейронной сетью, которая связана с дисплеем или ЭВМ, выход искусственной нейронной сети соединен с тринадцатым элементом временной задержки, который подключен к входу искусственной нейронной сети.
Однако при реализации данного устройства необходима предварительно обученная искусственная нейронная сеть по опытным данным работы асинхронного двигателя во всех режимах.
Техническим результатом предложенного изобретения является расширение арсенала средств для определения оценки частоты вращения ротора и оценки момента сопротивления на валу асинхронного двигателя.
Предложенное устройство для определения оценки частоты вращения ротора и оценки момента сопротивления на валу асинхронного двигателя содержит три датчика фазных напряжений и три датчика фазных токов, которые подключены к фазам питания асинхронного двигателя. К датчикам фазных напряжений и датчикам фазных токов подключен преобразователь координат, выходы которого подключены к первому, второму, третьему и четвертому блокам временной задержки, к первому и второму блокам определения величины прогноза оценки тока, к блоку определения величины прогноза оценки момента сопротивления на валу двигателя и к блоку определения величины оценки момента сопротивления на валу двигателя. Первый блок временной задержки подключен к первому блоку определения величины прогноза оценки тока и к блоку определения величины прогноза оценки момента сопротивления на валу двигателя. Второй блок временной задержки подключен к первому блоку определения величины прогноза оценки тока. Третий блок временной задержки подключен ко второму блоку определения величины прогноза оценки тока. Четвертый блок временной задержки подключен ко второму блоку определения величины прогноза оценки тока и к блоку определения величины прогноза оценки момента сопротивления на валу двигателя. Первый блок определения величины прогноза оценки тока соединен с первым блоком определения величины коррекции оценки тока, который соединен с пятым блоком временной задержки, с первым блоком определения величины прогноза оценки тока, с блоком определения величины прогноза оценки момента сопротивления на валу двигателя, с блоком определения величины оценки момента сопротивления на валу двигателя, с первым блоком определения величины прогноза оценки потокосцепления ротора и с блоком определения величины оценки электромагнитного момента. Второй блок определения величины прогноза оценки тока соединен с вторым блоком определения величины коррекции оценки тока, который соединен с шестым блоком временной задержки, с вторым блоком определения величины прогноза оценки тока, с блоком определения величины прогноза оценки момента сопротивления на валу двигателя, с блоком определения величины оценки момента сопротивления на валу, с вторым блоком определения величины прогноза оценки потокосцепления ротора и с блоком определения величины оценки электромагнитного момента. Пятый блок временной задержки соединен с первым блоком определения величины прогноза оценки тока, с первым блоком определения величины коррекции оценки тока, с блоком определения величины прогноза оценки момента сопротивления на валу двигателя и с первым блоком определения величины прогноза оценки потокосцепления ротора. Шестой блок временной задержки соединен с вторым блоком определения величины прогноза оценки тока, с блоком определения величины прогноза оценки момента сопротивления на валу двигателя, с вторым блоком определения величины коррекции оценки тока и с вторым блоком определения величины прогноза оценки потокосцепления ротора. Первый блок определения величины прогноза оценки потокосцепления ротора подключен к первому блоку определения величины коррекции оценки потокосцепления ротора, выход которого подключен к первому блоку определения величины прогноза оценки тока, к второму блоку определения величины прогноза оценки тока, к блоку определения величины прогноза оценки момента сопротивления на валу двигателя, к блоку определения величины оценки момента сопротивления на валу двигателя, к первому блоку определения величины прогноза оценки потокосцепления ротора, к блоку определения величины оценки электромагнитного момента, к седьмому блоку временной задержки и к второму блоку определения величины прогноза оценки потокосцепления ротора. Второй блок определения величины прогноза оценки потокосцепления ротора подключен ко второму блоку определения величины коррекции оценки потокосцепления ротора, выход которого подключен к первому блоку определения величины прогноза оценки тока, к второму блоку определения величины прогноза оценки тока, к блоку определения величины прогноза оценки момента сопротивления на валу двигателя, к блоку определения величины оценки момента сопротивления на валу двигателя, к блоку определения величины оценки электромагнитного момента, к второму блоку определения величины прогноза оценки потокосцепления ротора, к восьмому блоку временной задержки и к первому блоку определения величины прогноза оценки потокосцепления ротора. Седьмой блок временной задержки соединен с первым блоком определения величины прогноза оценки тока, с вторым блоком определения величины прогноза оценки тока, с блоком определения величины прогноза оценки момента сопротивления на валу двигателя, с первым блоком определения величины прогноза оценки потокосцепления ротора, с первым блоком определения величины коррекции оценки потокосцепления ротора и с вторым блоком определения величины прогноза оценки потокосцепления ротора. Восьмой блок временной задержки соединен с первым блоком определения величины прогноза оценки тока, с вторым блоком определения величины прогноза оценки тока, с вторым блоком определения величины прогноза оценки потокосцепления ротора, с вторым блоком определения величины коррекции оценки потокосцепления ротора, с первым блоком определения величины прогноза оценки потокосцепления ротора и с блоком определения величины прогноза оценки момента сопротивления на валу двигателя, который подключен к блоку определения величины коррекции оценки момента сопротивления на валу. Блок определения величины оценки электромагнитного момента соединен с блоком определения величины прогноза оценки частоты вращения ротора, с девятым блоком временной задержки, который соединен с блоком определения величины прогноза оценки частоты вращения ротора. Блок определения величины коррекции оценки момента сопротивления на валу двигателя соединен с десятым блоком временной задержки, с блоком определения величины оценки момента сопротивления на валу двигателя, который соединен с блоком определения величины прогноза оценки частоты вращения ротора, с блоком вывода информации и с одиннадцатым блоком временной задержки, который соединен с блоком определения величины прогноза оценки частоты вращения ротора. Десятый блок временной задержки подключен к блоку определения величины коррекции оценки момента сопротивления на валу двигателя. Блок определения величины прогноза оценки частоты вращения ротора подключен к блоку определения величины коррекции оценки частоты вращения ротора, который подключен к первому и второму блокам определения величины прогноза оценки тока, к первому и второму блокам определения величины прогноза оценки потокосцепления ротора, к блоку вывода информации и к двенадцатому блоку временной задержки. Двенадцатый блок временной задержки подключен к блоку определения величины коррекции оценки частоты вращения ротора, к первому и второму блокам определения величины прогноза оценки тока, к первому и второму блокам определения величины прогноза оценки потокосцепления ротора.
Таким образом, с помощью предложенного устройства, в отличие от прототипа, кроме оценки частоты вращения ротора можно определить и оценку момента сопротивления на валу асинхронного двигателя.
На фиг. 1 представлена схема устройства для определения оценки частоты вращения ротора и оценки момента сопротивления на валу асинхронного двигателя.
Устройство для определения оценки частоты вращения ротора и оценки момента сопротивления на валу асинхронного двигателя (фиг. 1) содержит три датчика фазных напряжений 1 (ДН1), 2 (ДН2), 3 (ДН3) и три датчика фазных токов 4 (ДТ1), 5 (ДТ2), 6 (ДТ3), которые подключены к фазам питания асинхронного двигателя (не показано на фиг. 1). К датчикам фазных напряжений 1 (ДН1), 2 (ДН2), 3 (ДН3) и к датчикам фазных токов 4 (ДТ1), 5 (ДТ2), 6 (ДТ3) подключен преобразователь координат 7 (ПК), выходы которого подключены к первому 8 (БВЗ1), второму 9 (БВЗ2), третьему 10 (БВЗ3), четвертому 11 (БВЗ4) блокам временной задержки, к первому 12 (БПОТ1) и второму 13 (БПОТ2) блокам определения величины прогноза оценки тока, к блоку определения величины прогноза оценки момента сопротивления на валу двигателя 14 (БПОМС), к блоку определения величины оценки момента сопротивления на валу двигателя 15 (БОМС). Первый блок временной задержки 8 (БВЗ1) подключен к первому блоку определения величины прогноза оценки тока 12 (БПОТ1), к блоку определения величины прогноза оценки момента сопротивления на валу 14 двигателя (БПОМС). Второй блок временной задержки 9 (БВЗ2) подключен к первому блоку определения величины прогноза оценки тока 12 (БПОТ1). Третий блок временной задержки 10 (БВЗ3) подключен к второму блоку определения величины прогноза оценки тока 13 (БПОТ2). Четвертый блок временной задержки 11 (БВЗ4) подключен к второму блоку определения величины прогноза оценки тока 13 (БПОТ2), к блоку определения величины прогноза оценки момента сопротивления на валу двигателя 14 (БПОМС).
Первый блок определения величины прогноза оценки тока 12 (БПОТ1) соединен с первым блоком определения величины коррекции оценки тока 16 (БКОТ1), который соединен с пятым блоком временной задержки 17 (БВ35), с первым блоком определения величины прогноза оценки тока 12 (БПОТ1), с блоком определения величины прогноза оценки момента сопротивления на валу двигателя 14 (БПОМС), с блоком определения величины оценки момента сопротивления на валу двигателя 15 (БОМС), с первым блоком определения величины прогноза оценки потокосцепления ротора 18 (БПОП1) и с блоком определения величины оценки электромагнитного момента 19 (БОЭМ).
Второй блок определения величины прогноза оценки тока 13 (БПОТ2) соединен с вторым блоком определения величины коррекции оценки тока 20 (БКОТ2), который соединен с шестым блоком временной задержки 21 (БВ36), с вторым блоком определения величины прогноза оценки тока 13 (БПОТ2), с блоком определения величины прогноза оценки момента сопротивления на валу двигателя 14 (БПОМС), с блоком определения величины оценки момента сопротивления на валу двигателя 15 (БОМС), с вторым блоком определения величины прогноза оценки потокосцепления ротора 22 (БПОП2) и с блоком определения величины оценки электромагнитного момента 19 (БОЭМ).
Пятый блок временной задержки 17 (БВЗ5) соединен с первым блоком определения величины прогноза оценки тока 12 (БПОТ1), с первым блоком определения величины коррекции оценки тока 16 (БКОТ1), с блоком определения величины прогноза оценки момента сопротивления на валу двигателя 14 (БПОМС) и с первым блоком определения величины прогноза оценки потокосцепления ротора 18 (БПОП1).
Шестой блок временной задержки 21 (БВЗ6) соединен с вторым блоком определения величины прогноза оценки тока 13 (БПОТ2), с блоком определения величины прогноза оценки момента сопротивления на валу двигателя 14 (БПОМС), с вторым блоком определения величины коррекции оценки тока 20 (БКОТ2) и с вторым блоком определения величины прогноза оценки потокосцепления ротора 22 (БПОП2).
Первый блок определения величины прогноза оценки потокосцепления ротора 18 (БПОП1) подключен к первому блоку определения величины коррекции оценки потокосцепления ротора 23 (БКОП1), выход которого подключен к первому блоку определения величины прогноза оценки тока 12 (БПОТ1), к второму блоку определения величины прогноза оценки тока 13 (БПОТ2), к блоку определения величины прогноза оценки момента сопротивления на валу 14 (БПОМС), к блоку определения величины оценки момента сопротивления на валу 15 (БОМС), к первому блоку определения величины прогноза оценки потокосцепления ротора 18 (БПОП1), к блоку определения величины оценки электромагнитного момента 19 (БОЭМ), к седьмому блоку временной задержки 24 (БВЗ7) и к второму блоку определения величины прогноза оценки потокосцепления ротора 22 (БПОП2).
Второй блок определения величины прогноза оценки потокосцепления ротора 22 (БПОП2) подключен к второму блоку определения величины коррекции оценки потокосцепления ротора 25 (БКОП2), выход которого подключен к первому блоку определения величины прогноза оценки тока 12 (БПОТ1), к второму блоку определения величины прогноза оценки тока 13 (БПОТ2), к блоку определения величины прогноза оценки момента сопротивления на валу двигателя 14 (БПОМС), к блоку определения величины оценки момента сопротивления на валу двигателя 15 (БОМС), к блоку определения величины оценки электромагнитного момента 19 (БОЭМ), к второму блоку определения величины прогноза оценки потокосцепления ротора 22 (БПОП2), к восьмому блоку временной задержки 26 (БВЗ8) и к первому блоку определения величины прогноза оценки потокосцепления ротора 18 (БПОП1).
Седьмой блок временной задержки 24 (БВЗ7) соединен с первым блоком определения величины прогноза оценки тока 12 (БПОТ1), с вторым блоком определения величины прогноза оценки тока 13 (БПОТ2), с блоком определения величины прогноза оценки момента сопротивления на валу двигателя 14 (БПОМС), с первым блоком определения величины прогноза оценки потокосцепления ротора 18 (БПОП1), с первым блоком определения величины коррекции оценки потокосцепления ротора 23 (БКОП1) и с вторым блоком определения величины прогноза оценки потокосцепления ротора 22 (БПОП2).
Восьмой блок временной задержки 26 (БВЗ8) соединен с первым блоком определения величины прогноза оценки тока 12 (БПОТ1), с вторым блоком определения величины прогноза оценки тока 13 (БПОТ2), с вторым блоком определения величины прогноза оценки потокосцепления ротора 22 (БПОП2), с вторым блоком определения величины коррекции оценки потокосцепления ротора 25 (БКОП2), с первым блоком определения величины прогноза оценки потокосцепления ротора 18 (БПОП1), с блоком определения величины прогноза оценки момента сопротивления на валу двигателя 14 (БПОМС), который подключен к блоку определения величины коррекции оценки момента сопротивления на валу двигателя 27 (БКОМС).
Блок определения величины оценки электромагнитного момента 19 (БОЭМ) соединен с блоком определения величины прогноза оценки частоты вращения ротора 28 (БПОЧВ), с девятым блоком временной задержки 29 (БВЗ9), который соединен с блоком определения величины прогноза оценки частоты вращения ротора 28 (БПОЧВ).
Блок определения величины коррекции оценки момента сопротивления на валу двигателя 27 (БКОМС) соединен с десятым блоком временной задержки 30 (БВЗ10), с блоком определения величины оценки момента сопротивления на валу двигателя 15 (БОМС), который соединен с блоком определения величины прогноза оценки частоты вращения ротора 28 (БПОЧВ), с блоком вывода информации 31 (БВИ), с одиннадцатым блоком временной задержки 32 (БВЗ11), который соединен с блоком определения величины прогноза оценки частоты вращения ротора 28 (БПОЧВ). Десятый блок временной задержки 30 (БВЗ10) подключен к блоку определения величины коррекции оценки момента сопротивления на валу двигателя 27 (БКОМС).
Блок определения величины прогноза оценки частоты вращения ротора 28 (БПОЧВ) подключен к блоку определения величины коррекции оценки частоты вращения ротора 33 (БКОЧВ), который подключен к первому 12 (БПОТ1) и второму 13 (БПОТ2) блокам определения величины прогноза оценки тока, к первому 18 (БПОП1) и второму 22 (БПОП2) блокам определения величины прогноза оценки потокосцепления ротора, к блоку вывода информации 31 (БВИ) и к двенадцатому блоку временной задержки 34 (БВЗ12).
Двенадцатый блок временной задержки 34 (БВЗ12) подключен к блоку определения величины коррекции оценки частоты вращения ротора 33 (БКОЧВ), к первому 12 (БПОТ1) и второму 13 (БПОТ2) блокам определения величины прогноза оценки тока, к первому 18 (БПОП1) и второму 22 (БПОП2) блокам определения величины прогноза оценки потокосцепления ротора.
В качестве датчиков фазных напряжений 1 (ДН1), 2 (ДН2), 3 (ДН3) использованы датчики напряжения LEM. Датчики фазных токов 4 (ДТ1), 5 (ДТ2), 6 (ДТ3) - датчики тока КЭИ - 0,1. Преобразователь координат 7 (ПК), блоки временной задержки 8 (БВЗ1), 9 (БВЗ2), 10 (БВЗ3), 11 (БВЗ4), 17 (БВЗ5), 21 (БВЗ6), 24 (БВЗ7), 26 (БВЗ8), 29 (БВЗ9), 30 (БВЗ10), 32 (БВЗ11), 34 (БВЗ12), блоки определения величины прогноза оценки тока 12 (БПОТ1) и 13 (БПОТ2), блок определения величины прогноза оценки момента сопротивления на валу двигателя 14 (БПОМС), блок определения оценки момента сопротивления на валу двигателя 15 (БОМС), блок определения величины оценки электромагнитного момента 19 (БОЭМ), блоки определения величины коррекции оценки тока 16 (БКОТ1) и 20 (БКОТ2), первый и второй блоки определения величины прогноза оценки потокосцепления ротора 18 (БПОП1) и 22 (БПОП2), первый и второй блоки определения величины коррекции оценки потокосцепления ротора 23 (БКОП1) и 25 (БКОП2), блок определения коррекции оценки момента сопротивления на валу двигателя 27 (БКОМС), блок определения прогноза оценки частоты вращения ротора 28 (БПОЧВ), блок вывода информации 31 (БВИ), блок определения коррекции оценки частоты вращения ротора 33 (БКОЧВ) выполнены на базе микроконтроллера типа STM32F405RGT6 фирмы STMicroelectronics.
Статорные обмотки асинхронного двигателя с короткозамкнутым ротором подключают к трехфазному источнику питания. При подключении к фазам питания датчиков фазных напряжений 1 (ДН1), 2 (ДН2), 3 (ДН3) и датчиков фазных токов 4 (ДТ1), 5 (ДТ2), 6 (ДТ3) одновременно измеряют мгновенные величины фазных токов  ,
,  ,
,  и напряжений
и напряжений  ,
,  ,
,  на трех фазах статора, которые передают в преобразователь координат 7 (ПК), где их преобразуют в величины токов
на трех фазах статора, которые передают в преобразователь координат 7 (ПК), где их преобразуют в величины токов  ,
,  и напряжений
и напряжений  ,
,  в прямоугольной стационарной системе координат в текущий момент времени при заданном периоде дискретизации 100 мкс.
в прямоугольной стационарной системе координат в текущий момент времени при заданном периоде дискретизации 100 мкс.
Одновременно величины напряжений , в прямоугольной стационарной системе координат на текущем шаге дискретизации передают соответственно во второй и третий блоки временной задержки 9 (БВЗ2) и 10 (БВЗ3), а величины токов , в прямоугольной стационарной системе координат на текущем шаге дискретизации передают соответственно в первый и четвертый блоки временной задержки 8 (БВЗ1) и 11 (БВЗ4), в которых соответственно выполняют их временную задержку на один период дискретизации 100 мкс и получают величины токов  ,
,  и напряжений
и напряжений  ,
,  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
Одновременно в первый блок определения величины прогноза оценки тока 12 (БПОТ1) для определения величины прогноза оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации одновременно поступают:
в прямоугольной стационарной системе координат на текущем шаге дискретизации одновременно поступают:
из преобразователя координат 7 (ПК) - величины тока  и напряжения
и напряжения  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из первого блока временной задержки 8 (БВЗ1) - величины тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из второго блока временной задержки 9 (БВЗ2) - величина напряжения  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из первого блока определения величины коррекции оценки тока 16 (БКОТ1) - величина оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из пятого блока временной задержки 17 (БВЗ5) - величина оценки тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из первого блока определения величины коррекции оценки потокосцепления ротора 23 (БКОП1) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из седьмого блока временной задержки 24 (БВЗ7) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из второго блока определения величины коррекции оценки потокосцепления ротора 25 (БКОП2) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из восьмого блока временной задержки 26 (БВЗ8) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из блока определения величины коррекции оценки частоты вращения ротора 33 (БКОЧВ) - величина оценки частоты вращения ротора  на текущем шаге дискретизации,
на текущем шаге дискретизации,
из двенадцатого блока временной задержки 34 (БВЗ12) - величина оценки частоты вращения ротора  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Одновременно во второй блок определения величины прогноза оценки тока 13 (БПОТ2) для определения величины прогноза оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации одновременно поступают:
в прямоугольной стационарной системе координат на текущем шаге дискретизации одновременно поступают:
из преобразователя координат 7 (ПК) - величины тока  и напряжения
и напряжения  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из третьего блока временной задержки 10 (БВЗ3) - величина напряжения  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из четвертого блока временной задержки 11 (БВЗ4) - величина тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из второго блока определения величины коррекции оценки тока 20 (БКОТ2) - величина оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из шестого блока временной задержки 21 (БВЗ6) - величина оценки тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из первого блока определения величины коррекции оценки потокосцепления ротора 23 (БКОП1) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из седьмого блока временной задержки 24 (БВЗ7) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из второго блока определения величины коррекции оценки потокосцепления ротора 25 (БКОП2) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из восьмого блока временной задержки 26 (БВЗ8) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из блока определения величины коррекции оценки частоты вращения ротора 33 (БКОЧВ) - величина оценки частоты вращения ротора  на текущем шаге дискретизации,
на текущем шаге дискретизации,
из двенадцатого блока временной задержки 34 (БВЗ12) - величина оценки частоты вращения ротора  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Определение величин прогноза оценки тока  и
и  в прямоугольной стационарной системе координат на текущем шаге дискретизации происходит соответственно в первом и втором блоках определения величины коррекции оценки тока 12 (БПОТ1) и 13 (БПОТ2) согласно следующим выражениям:
в прямоугольной стационарной системе координат на текущем шаге дискретизации происходит соответственно в первом и втором блоках определения величины коррекции оценки тока 12 (БПОТ1) и 13 (БПОТ2) согласно следующим выражениям:
где  - активное сопротивление обмотки статора, Ом;
- активное сопротивление обмотки статора, Ом;
 - приведенное к статору активное сопротивление обмотки ротора, Ом;
- приведенное к статору активное сопротивление обмотки ротора, Ом;
 - эквивалентное активное сопротивление асинхронного двигателя, Ом;
- эквивалентное активное сопротивление асинхронного двигателя, Ом;
 - эквивалентная индуктивность обмотки статора, Гн;
- эквивалентная индуктивность обмотки статора, Гн;
 - эквивалентная индуктивность обмотки ротора, Гн;
- эквивалентная индуктивность обмотки ротора, Гн;
 - эквивалентная индуктивность асинхронного двигателя, Гн;
- эквивалентная индуктивность асинхронного двигателя, Гн;
 - результирующая индуктивность, обусловленная магнитным потоком в воздушном зазоре машины, Гн;
- результирующая индуктивность, обусловленная магнитным потоком в воздушном зазоре машины, Гн;
 - коэффициенты передачи отработки невязки токов статора в системе координат
- коэффициенты передачи отработки невязки токов статора в системе координат  , Ом;
, Ом;
 - число пар полюсов асинхронного двигателя;
- число пар полюсов асинхронного двигателя;
 - период дискретизации, мкс.
- период дискретизации, мкс.
Величину прогноза оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации из первого блока определения величины прогноза оценки тока 12 (БПОТ1) и величину оценки тока
в прямоугольной стационарной системе координат на текущем шаге дискретизации из первого блока определения величины прогноза оценки тока 12 (БПОТ1) и величину оценки тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации из пятого блока временной задержки 17 (БВЗ5) передают в первый блок определения величины коррекции оценки тока 16 (БКОТ1), где одновременно определяют величину оценки тока
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации из пятого блока временной задержки 17 (БВЗ5) передают в первый блок определения величины коррекции оценки тока 16 (БКОТ1), где одновременно определяют величину оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации, который передают в пятый блок временной задержки 17 (БВЗ5), где одновременно выполняют его временную задержку на один период дискретизации и получают величину оценки тока
в прямоугольной стационарной системе координат на текущем шаге дискретизации, который передают в пятый блок временной задержки 17 (БВЗ5), где одновременно выполняют его временную задержку на один период дискретизации и получают величину оценки тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
Величину прогноза оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации из второго блока определения величины прогноза оценки тока 13 (БПОТ2) и величину оценки тока
в прямоугольной стационарной системе координат на текущем шаге дискретизации из второго блока определения величины прогноза оценки тока 13 (БПОТ2) и величину оценки тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации из шестого блока временной задержки 21 (БВЗ6) передают во второй блок определения величины коррекции оценки тока 20 (БКОТ2), где одновременно определяют величину оценки тока
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации из шестого блока временной задержки 21 (БВЗ6) передают во второй блок определения величины коррекции оценки тока 20 (БКОТ2), где одновременно определяют величину оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации, который передают в шестой блок временной задержки 21 (БВЗ6), где одновременно выполняют его временную задержку и получают величину оценки тока
в прямоугольной стационарной системе координат на текущем шаге дискретизации, который передают в шестой блок временной задержки 21 (БВЗ6), где одновременно выполняют его временную задержку и получают величину оценки тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
Определение величин оценки тока  и
и  в прямоугольной стационарной системе координат на текущем шаге дискретизации осуществляют соответственно в первом и втором блоках определения величины коррекции оценки тока 16 (БКОТ1) и 20 (БКОТ2) согласно следующим выражениям:
в прямоугольной стационарной системе координат на текущем шаге дискретизации осуществляют соответственно в первом и втором блоках определения величины коррекции оценки тока 16 (БКОТ1) и 20 (БКОТ2) согласно следующим выражениям:
 ,
,
 .
.
Затем одновременно в первый блок определения величины прогноза оценки потокосцепления ротора 18 (БПОП1) для определения величины прогноза оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации одновременно поступают:
в прямоугольной стационарной системе координат на текущем шаге дискретизации одновременно поступают:
из первого блока определения величины коррекции оценки тока 16 (БКОТ1) - величина оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из пятого блока временной задержки 17 (БВЗ5) - величина оценки тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из первого блока определения величины коррекции оценки потокосцепления ротора 23 (БКОП1) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из седьмого блока временной задержки 24 (БВЗ7) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из блока определения величины оценки частоты вращения ротора 33 (БКОЧВ) - величина оценки частоты вращения ротора  на текущем шаге дискретизации,
на текущем шаге дискретизации,
из двенадцатого блока временной задержки 34 (БВЗ12) - величина оценки частоты вращения ротора  на предыдущем шаге дискретизации,
на предыдущем шаге дискретизации,
из второго блока определения величины коррекции оценки потокосцепления ротора 25 (БКОП2) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из восьмого блока временной задержки 26 (БВЗ8) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
Во второй блок определения величины прогноза оценки потокосцепления ротора 22 (БПОП2) для определения величины прогноза оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации одновременно передают:
в прямоугольной стационарной системе координат на текущем шаге дискретизации одновременно передают:
из второго блока определения величины коррекции оценки тока 20 (БКОТ2) - величину оценки тока в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из шестого блока временной задержки 21 (БВЗ6) - величина оценки тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из второго блока определения величины коррекции оценки потокосцепления ротора 25 (БКОП2) - величина оценки потокосцепления ротора в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из восьмого блока временной задержки 26 (БВЗ8) - величина оценки потокосцепления ротора в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из блока определения величины оценки частоты вращения ротора 33 (БКОЧВ) - величина оценки частоты вращения ротора  на текущем шаге дискретизации,
на текущем шаге дискретизации,
из двенадцатого блока временной задержки 34 (БВЗ12) - величина оценки частоты вращения ротора  на предыдущем шаге дискретизации,
на предыдущем шаге дискретизации,
из первого блока определения величины коррекции оценки потокосцепления ротора 23 (БКОП1) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из седьмого блока временной задержки 24 (БВЗ7) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
Определение величин прогноза оценки потокосцепления ротора и  в прямоугольной стационарной системе координат на текущем шаге дискретизации осуществляют соответственно в первом и втором блоках определения величины прогноза оценки потокосцепления ротора 18 (БПОП1) и 22 (БПОП2) согласно следующим выражениям:
в прямоугольной стационарной системе координат на текущем шаге дискретизации осуществляют соответственно в первом и втором блоках определения величины прогноза оценки потокосцепления ротора 18 (БПОП1) и 22 (БПОП2) согласно следующим выражениям:
Величину прогноза оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации из первого блока определения величины прогноза оценки потокосцепления ротора 18 (БПОП1) и величину оценки потокосцепления ротора
в прямоугольной стационарной системе координат на текущем шаге дискретизации из первого блока определения величины прогноза оценки потокосцепления ротора 18 (БПОП1) и величину оценки потокосцепления ротора  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации из седьмого блока временной задержки 24 (БВЗ7) одновременно передают в первый блок определения величины коррекции оценки потокосцепления ротора 23 (БКОП1), где определяют величину оценки потокосцепления ротора
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации из седьмого блока временной задержки 24 (БВЗ7) одновременно передают в первый блок определения величины коррекции оценки потокосцепления ротора 23 (БКОП1), где определяют величину оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации, который передают в седьмой блок временной задержки 24 (БВЗ7), где одновременно выполняют его временную задержку на один период дискретизации и получают величину оценки потокосцепления ротора
в прямоугольной стационарной системе координат на текущем шаге дискретизации, который передают в седьмой блок временной задержки 24 (БВЗ7), где одновременно выполняют его временную задержку на один период дискретизации и получают величину оценки потокосцепления ротора  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
Величину прогноза оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации из второго блока определения величины прогноза оценки потокосцепления ротора 22 (БПОП2) и величину оценки потокосцепления ротора
в прямоугольной стационарной системе координат на текущем шаге дискретизации из второго блока определения величины прогноза оценки потокосцепления ротора 22 (БПОП2) и величину оценки потокосцепления ротора  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации из восьмого блока временной задержки 26 (БВЗ8) одновременно передают во второй блок определения величины коррекции оценки потокосцепления ротора 25 (БКОП2), где определяют величину оценки потокосцепления ротора
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации из восьмого блока временной задержки 26 (БВЗ8) одновременно передают во второй блок определения величины коррекции оценки потокосцепления ротора 25 (БКОП2), где определяют величину оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации, который передают в восьмой блок временной задержки 26 (БВЗ8), где одновременно выполняют его временную задержку и получают величину оценки потокосцепления ротора
в прямоугольной стационарной системе координат на текущем шаге дискретизации, который передают в восьмой блок временной задержки 26 (БВЗ8), где одновременно выполняют его временную задержку и получают величину оценки потокосцепления ротора  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
Определение величин оценки потокосцепления ротора  и
и  в прямоугольной стационарной системе координат на текущем шаге дискретизации осуществляют соответственно в первом и втором блоках определения величины коррекции оценки потокосцепления ротора 23 (БКОП1) и 25 (БКОП2) согласно следующим выражениям:
в прямоугольной стационарной системе координат на текущем шаге дискретизации осуществляют соответственно в первом и втором блоках определения величины коррекции оценки потокосцепления ротора 23 (БКОП1) и 25 (БКОП2) согласно следующим выражениям:


Из первого блока определения величины коррекции оценки тока 16 (БКОТ1) передают величину оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации, из второго блока определения величины коррекции оценки тока 20 (БКОТ2) передают величину оценки тока
в прямоугольной стационарной системе координат на текущем шаге дискретизации, из второго блока определения величины коррекции оценки тока 20 (БКОТ2) передают величину оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации, из первого блока определения величины коррекции оценки потокосцепления ротора 23 (БКОП1) передают величину оценки потокосцепления ротора в прямоугольной стационарной системе координат на текущем шаге дискретизации, из второго блока определения величины коррекции оценки потокосцепления ротора 25 (БКОП2) передают величину оценки потокосцепления ротора в прямоугольной стационарной системе координат на текущем шаге дискретизации в блок оценки электромагнитного момента 19 (БОЭМ), где одновременно определяют величину оценки электромагнитного момента
в прямоугольной стационарной системе координат на текущем шаге дискретизации, из первого блока определения величины коррекции оценки потокосцепления ротора 23 (БКОП1) передают величину оценки потокосцепления ротора в прямоугольной стационарной системе координат на текущем шаге дискретизации, из второго блока определения величины коррекции оценки потокосцепления ротора 25 (БКОП2) передают величину оценки потокосцепления ротора в прямоугольной стационарной системе координат на текущем шаге дискретизации в блок оценки электромагнитного момента 19 (БОЭМ), где одновременно определяют величину оценки электромагнитного момента  на текущем шаге дискретизации, который передают в девятый блок временной задержки 29 (БВЗ9), где одновременно выполняют его временную задержку и получают величину оценки электромагнитного момента
на текущем шаге дискретизации, который передают в девятый блок временной задержки 29 (БВЗ9), где одновременно выполняют его временную задержку и получают величину оценки электромагнитного момента  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Определение величины оценки электромагнитного момента на текущем шаге дискретизации в блоке определения величины оценки электромагнитного момента 19 (БОЭМ) происходит согласно следующему выражению:

Одновременно в блок определения величины прогноза оценки момента сопротивления на валу 14 (БПОМС) для определения величины прогноза оценки момента сопротивления на валу  на текущем шаге дискретизации одновременно поступают:
на текущем шаге дискретизации одновременно поступают:
из преобразователя координат 7 (ПК) - величины тока  и в прямоугольной стационарной системе координат на текущем шаге дискретизации,
и в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из первого блока временной задержки 8 (БВЗ1) - величина тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из четвертого блока временной задержки 11 (БВЗ4) - величина тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из первого блока определения величины коррекции оценки тока 16 (БКОТ1) - величина оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из второго блока определения величины коррекции оценки тока 20 (БКОТ2) - величина оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из пятого блока временной задержки 17 (БВЗ5) - величина оценки тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из шестого блока временной задержки 21 (БВЗ6) - величина оценки тока  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из первого блока определения величины коррекции оценки потокосцепления ротора 23 (БКОП1) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из седьмого блока временной задержки 24 (БВЗ7) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации,
из второго блока определения величины коррекции оценки потокосцепления ротора 25 (БКОП2) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из восьмого блока временной задержки 26 (БВЗ8) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
в прямоугольной стационарной системе координат на предыдущем шаге дискретизации.
Определение величины прогноза оценки момента сопротивления на валу  на текущем шаге дискретизации в блоке определения величины прогноза оценки момента сопротивления на валу 14 (БПОМС) осуществляют согласно следующему выражению:
на текущем шаге дискретизации в блоке определения величины прогноза оценки момента сопротивления на валу 14 (БПОМС) осуществляют согласно следующему выражению:


где  - коэффициент интегральной отработки, с.
- коэффициент интегральной отработки, с.
Из блока определения величины прогноза оценки момента сопротивления на валу двигателя 14 (БПОМС) передают величину прогноза оценки момента сопротивления на валу  на текущем шаге дискретизации, из десятого блока временной задержки 30 (БВЗ10) передают величину коррекции оценки момента сопротивления на валу
на текущем шаге дискретизации, из десятого блока временной задержки 30 (БВЗ10) передают величину коррекции оценки момента сопротивления на валу  на предыдущем шаге дискретизации в блок определения величины коррекции оценки момента сопротивления на валу 27 (БКОМС), где одновременно определяют величину коррекции оценки момента сопротивления на валу
на предыдущем шаге дискретизации в блок определения величины коррекции оценки момента сопротивления на валу 27 (БКОМС), где одновременно определяют величину коррекции оценки момента сопротивления на валу  на текущем шаге дискретизации.
на текущем шаге дискретизации.
Из блока определения величины коррекции оценки момента сопротивления на валу 27 (БКОМС) передают величину коррекции оценки момента сопротивления на валу в десятый блок временной задержки 30 (БВЗ10), где одновременно выполняют его временную задержку на один период дискретизации и получают величину коррекции оценки момента сопротивления на валу  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Определение величины коррекции оценки момента сопротивления на валу  на текущем шаге дискретизации в блоке определения величины коррекции оценки момента сопротивления на валу 27 (БКОМС) осуществляют согласно следующему выражению:
на текущем шаге дискретизации в блоке определения величины коррекции оценки момента сопротивления на валу 27 (БКОМС) осуществляют согласно следующему выражению:
 .
.
Одновременно в блок определения величины оценки момента сопротивления на валу двигателя 15 (БОМС) для определения величины оценки момента сопротивления на валу  на текущем шаге дискретизации одновременно поступают:
на текущем шаге дискретизации одновременно поступают:
из преобразователя координат 7 (ПК) - величины тока  и
и  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из первого блока определения величины коррекции оценки тока 16 (БКОТ1) - величина оценки тока  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из второго блока определения величины коррекции оценки тока 20 (БКОТ2) - величина оценки тока в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из первого блока определения величины коррекции оценки потокосцепления ротора 23 (БКОП1) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из второго блока определения величины коррекции оценки потокосцепления ротора 25 (БКОП2) - величина оценки потокосцепления ротора  в прямоугольной стационарной системе координат на текущем шаге дискретизации,
в прямоугольной стационарной системе координат на текущем шаге дискретизации,
из блока определения величины коррекции оценки момента сопротивления на валу 27 (БКОМС) - величина коррекции оценки момента сопротивления на валу  на текущем шаге дискретизации.
на текущем шаге дискретизации.
Из блока определения величины оценки момента сопротивления на валу 15 (БОМС) передают величину оценки момента сопротивления на валу на текущем шаге дискретизации в одиннадцатый блок временной задержки 32 (БВЗ11), где одновременно выполняют его временную задержку на один период дискретизации и получают величину оценки момента сопротивления на валу  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Определение величины оценки момента сопротивления на валу на текущем шаге дискретизации в блоке определения величины оценки момента сопротивления на валу 15 (БОМС) осуществляют согласно следующему выражению:

где  - коэффициент пропорциональной отработки, о.е.
- коэффициент пропорциональной отработки, о.е.
Из блока определения величины электромагнитного момента 19 (БОЭМ) передают величину оценки электромагнитного момента на текущем шаге дискретизации, из девятого блока временной задержки 29 (БВЗ9) передают величину оценки электромагнитного момента  на предыдущем шаге дискретизации, из блока определения величины оценки момента сопротивления на валу двигателя 15 (БОМС) передают величину оценки момента сопротивления на валу на текущем шаге дискретизации, из одиннадцатого блока временной задержки 32 (БВЗ11) передали величину оценки момента сопротивления на валу
на предыдущем шаге дискретизации, из блока определения величины оценки момента сопротивления на валу двигателя 15 (БОМС) передают величину оценки момента сопротивления на валу на текущем шаге дискретизации, из одиннадцатого блока временной задержки 32 (БВЗ11) передали величину оценки момента сопротивления на валу  на предыдущем шаге дискретизации в блок определения величины прогноза оценки частоты вращения ротора 28 (БПОЧВ), где одновременно определяют величину прогноза оценки частоты вращения ротора
на предыдущем шаге дискретизации в блок определения величины прогноза оценки частоты вращения ротора 28 (БПОЧВ), где одновременно определяют величину прогноза оценки частоты вращения ротора  на текущем шаге дискретизации.
на текущем шаге дискретизации.
Определение величины прогноза оценки частоты вращения ротора на текущем шаге дискретизации в блоке определения величины прогноза оценки частоты вращения ротора 28 (БПОЧВ) осуществляют по выражению:

где  - эквивалентный момент инерции, приведенный к валу асинхронного двигателя, кг⋅м2.
- эквивалентный момент инерции, приведенный к валу асинхронного двигателя, кг⋅м2.
Величину прогноза оценки частоты вращения ротора из блока определения прогноза оценки частоты вращения ротора 28 (БПОЧВ) и величину оценки частоты вращения ротора  на предыдущем шаге дискретизации из двенадцатого блока временной задержки 34 (БВЗ12) передают в блок определения величины коррекции оценки частоты вращения ротора 33 (БКОЧВ), где одновременно определяют величину оценки частоты вращения ротора
на предыдущем шаге дискретизации из двенадцатого блока временной задержки 34 (БВЗ12) передают в блок определения величины коррекции оценки частоты вращения ротора 33 (БКОЧВ), где одновременно определяют величину оценки частоты вращения ротора  на текущем шаге дискретизации, который передают на двенадцатый блок временной задержки 34 (БВЗ12), где одновременно выполняют его временную задержку на один период дискретизации и получили величину оценки частоты вращения ротора
на текущем шаге дискретизации, который передают на двенадцатый блок временной задержки 34 (БВЗ12), где одновременно выполняют его временную задержку на один период дискретизации и получили величину оценки частоты вращения ротора  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Определение величины оценки частоты вращения ротора  на текущем шаге дискретизации в блоке определения величины коррекции оценки частоты вращения ротора 33 (БКОЧВ) осуществляют согласно выражению:
на текущем шаге дискретизации в блоке определения величины коррекции оценки частоты вращения ротора 33 (БКОЧВ) осуществляют согласно выражению:

Результаты определения за период времени  с оценки частоты вращения ротора
с оценки частоты вращения ротора  из блока определения величины коррекции оценки частоты вращения ротора 33 (БКОЧВ) и оценки момента сопротивления на валу из блока определения величины оценки момента сопротивления на валу 15 (БОМС) передают в блок вывода информации 31 (БВИ).
из блока определения величины коррекции оценки частоты вращения ротора 33 (БКОЧВ) и оценки момента сопротивления на валу из блока определения величины оценки момента сопротивления на валу 15 (БОМС) передают в блок вывода информации 31 (БВИ).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ АСИНХРОННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2822608C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2024 |
|
RU2832962C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2024 |
|
RU2825800C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2570363C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158471C2 |
| УСТРОЙСТВО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2021 |
|
RU2766907C1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1605307A1 |
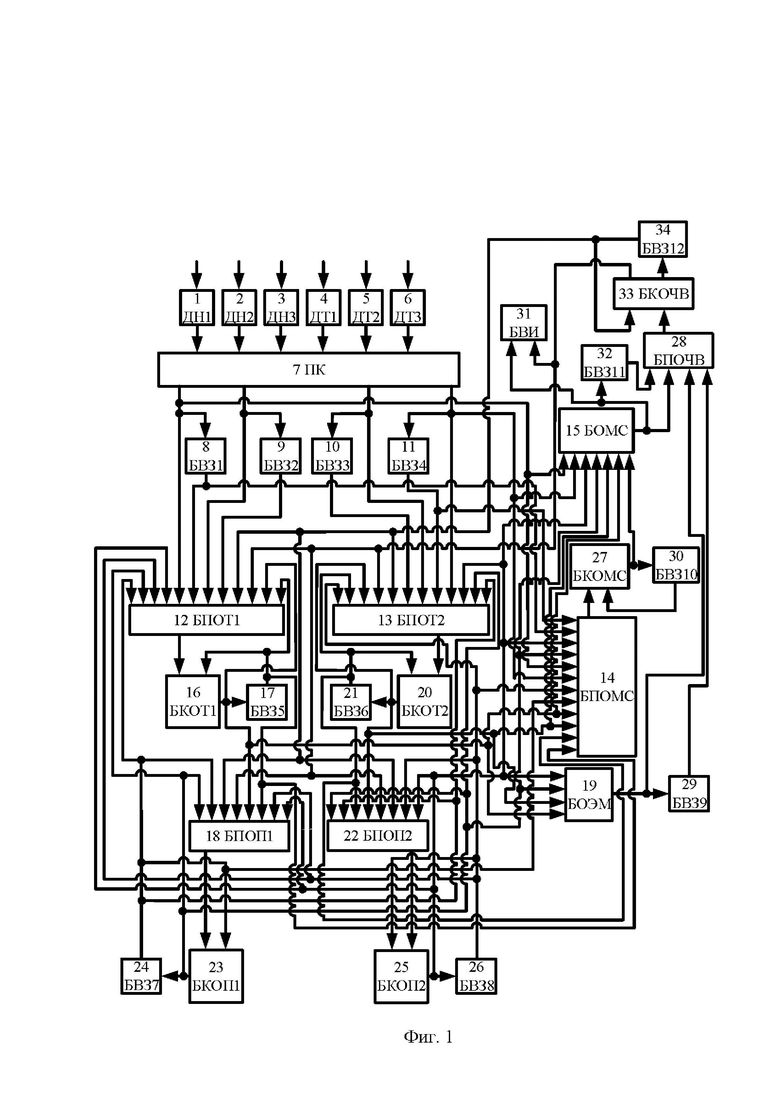
Устройство относится к электротехнике и может быть использовано для цифрового управления асинхронным двигателем. Технический результат: расширение арсенала технических средств. Устройство для определения оценки частоты вращения ротора и оценки момента сопротивления на валу асинхронного двигателя содержит датчики фазных напряжений (1, 2, 3) и датчики фазных токов (4, 5, 6), которые подключены к фазам питания асинхронного двигателя, преобразователь координат (7), блоки временной задержки (8, 9, 10, 11, 17, 21, 24, 26, 29, 30, 32, 34), блоки определения величины прогноза оценки тока (12, 13), блок определения величины прогноза оценки момента сопротивления на валу двигателя (14), блок определения величины оценки момента сопротивления на валу двигателя (15), блоки определения величины коррекции оценки тока (16, 20), блоки определения величины прогноза оценки потокосцепления ротора (18, 22), блок определения величины оценки электромагнитного момента (19), блоки определения величины коррекции оценки потокосцепления ротора (23, 25), блок определения величины коррекции оценки момента сопротивления на валу двигателя (27), блок определения величины прогноза оценки частоты вращения ротора (28), блок вывода информации (31), блок определения величины коррекции оценки частоты вращения ротора (33). 1 ил.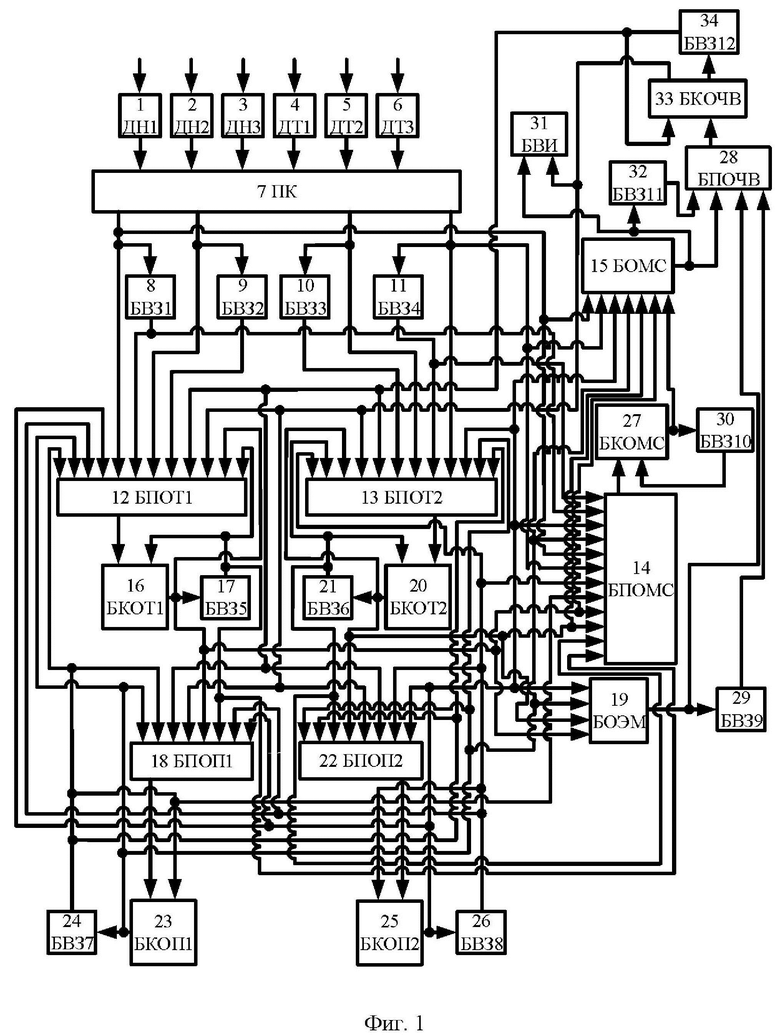
Устройство для определения оценки частоты вращения ротора и оценки момента сопротивления на валу асинхронного двигателя, содержащее датчики фазных токов, датчики фазных напряжений и блоки временной задержки, отличающееся тем, что содержит три датчика фазных напряжений (1), (2), (3) и три датчика фазных токов (4), (5), (6), которые подключены к фазам питания асинхронного двигателя, к датчикам фазных напряжений (1), (2), (3) и датчикам фазных токов (4), (5), (6) подключен преобразователь координат (7), выходы которого подключены к первому (8), второму (9), третьему (10), четвертому (11) блокам временной задержки, к первому (12) и второму (13) блокам определения величины прогноза оценки тока, к блоку определения величины прогноза оценки момента сопротивления на валу двигателя (14), блоку определения величины оценки момента сопротивления на валу двигателя (15), при этом первый блок временной задержки (8) подключен к первому блоку определения величины прогноза оценки тока (12), к блоку определения величины прогноза оценки момента сопротивления на валу двигателя (14); второй блок временной задержки (9) подключен к первому блоку определения величины прогноза оценки тока (12); третий блок временной задержки (10) подключен к второму блоку определения величины прогноза оценки тока (13); четвертый блок временной задержки (11) подключен к второму блоку определения величины прогноза оценки тока (13) и к блоку определения величины прогноза оценки момента сопротивления на валу двигателя (14), причем первый блок определения величины прогноза оценки тока (12) соединен с первым блоком определения величины коррекции оценки тока (16), который соединен с пятым блоком временной задержки (17), первым блоком определения величины прогноза оценки тока (12), блоком определения величины прогноза оценки момента сопротивления на валу двигателя (14), блоком определения величины оценки момента сопротивления на валу двигателя (15), с первым блоком определения величины прогноза оценки потокосцепления ротора (18) и с блоком определения величины оценки электромагнитного момента (19), а второй блок определения величины прогноза оценки тока (13) соединен с вторым блоком определения величины коррекции оценки тока (20), который соединен с шестым блоком временной задержки (21), с вторым блоком определения величины прогноза оценки тока (13), с блоком определения величины прогноза оценки момента сопротивления на валу двигателя (14), с блоком определения величины оценки момента сопротивления на валу двигателя (15), с вторым блоком определения величины прогноза оценки потокосцепления ротора (22) и с блоком определения величины оценки электромагнитного момента (19); пятый блок временной задержки (17) соединен с первым блоком определения величины прогноза оценки тока (12), с первым блоком определения величины коррекции оценки тока (16), с блоком определения величины прогноза оценки момента сопротивления на валу двигателя (14) и с первым блоком определения величины прогноза оценки потокосцепления ротора (18); шестой блок временной задержки (21) соединен с вторым блоком определения величины прогноза оценки тока (13), с блоком определения величины прогноза оценки момента сопротивления на валу двигателя (14), с вторым блоком определения величины коррекции оценки тока (20) и с вторым блоком определения величины прогноза оценки потокосцепления ротора (22); при этом первый блок определения величины прогноза оценки потокосцепления ротора (18) подключен к первому блоку определения величины коррекции оценки потокосцепления ротора (23), выход которого подключен к первому блоку определения величины прогноза оценки тока (12), к второму блоку определения величины прогноза оценки тока (13), к блоку определения величины прогноза оценки момента сопротивления на валу двигателя (14), к блоку определения величины оценки момента сопротивления на валу двигателя (15), к первому блоку определения величины прогноза оценки потокосцепления ротора (18), к блоку определения величины оценки электромагнитного момента (19), к седьмому блоку временной задержки (24) и к второму блоку определения величины прогноза оценки потокосцепления ротора (22); причем второй блок определения величины прогноза оценки потокосцепления ротора (22) подключен к второму блоку определения величины коррекции оценки потокосцепления ротора (25), выход которого подключен к первому блоку определения величины прогноза оценки тока (12), второму блоку определения величины прогноза оценки тока (13), блоку определения величины прогноза оценки момента сопротивления на валу двигателя (14), блоку определения величины оценки момента сопротивления на валу двигателя (15), блоку определения величины оценки электромагнитного момента (19), второму блоку определения величины прогноза оценки потокосцепления ротора (22), восьмому блоку временной задержки (26), первому блоку определения величины прогноза оценки потокосцепления ротора (18); седьмой блок временной задержки (24) соединен с первым блоком определения величины прогноза оценки тока (12), с вторым блоком определения величины прогноза оценки тока (13), с блоком определения величины прогноза оценки момента сопротивления на валу двигателя (14), с первым блоком определения величины прогноза оценки потокосцепления ротора (18), с первым блоком определения величины коррекции оценки потокосцепления ротора (23) и с вторым блоком определения величины прогноза оценки потокосцепления ротора (22); восьмой блок временной задержки (26) соединен с первым блоком определения величины прогноза оценки тока (12), с вторым блоком определения величины прогноза оценки тока (13), с вторым блоком определения величины прогноза оценки потокосцепления ротора (22), с вторым блоком определения величины коррекции оценки потокосцепления ротора (25), с первым блоком определения величины прогноза оценки потокосцепления ротора (18) и с блоком определения величины прогноза оценки момента сопротивления на валу двигателя (14), который подключен к блоку определения величины коррекции оценки момента сопротивления на валу двигателя (27); блок определения величины оценки электромагнитного момента (19) соединен с блоком определения величины прогноза оценки частоты вращения ротора (28) и с девятым блоком временной задержки (29), который соединен с блоком определения величины прогноза оценки частоты вращения ротора (28); блок определения величины коррекции оценки момента сопротивления на валу двигателя (27) соединен с десятым блоком временной задержки (30), блоком определения величины оценки момента сопротивления на валу двигателя (15), который соединен с блоком определения величины прогноза оценки частоты вращения ротора (28), блоком вывода информации (31), одиннадцатым блоком временной задержки (32), который соединен с блоком определения величины прогноза оценки частоты вращения ротора (28); причем десятый блок временной задержки (30) подключен к блоку определения величины коррекции оценки момента сопротивления на валу двигателя (27); блок определения величины прогноза оценки частоты вращения ротора (28) подключен к блоку определения величины коррекции оценки частоты вращения ротора (33), который подключен к первому (12) и второму (13) блокам определения величины прогноза оценки тока, первому (18) и второму (22) блокам определения величины прогноза оценки потокосцепления ротора, блоку вывода информации (31), двенадцатому блоку временной задержки (34); двенадцатый блок временной задержки (34) подключен к блоку определения величины коррекции оценки частоты вращения ротора (33), первому (12) и второму (13) блокам определения величины прогноза оценки тока, первому (18) и второму (22) блокам определения величины прогноза оценки потокосцепления ротора.
| Баровое отбойное устройство для угольных выемочных машин | 1958 |
|
SU115984A1 |
| WO 2016157306 A1, 06.10.2016 | |||
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ И ПРОЦЕССОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2543495C1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2011 |
|
RU2476983C1 |

