Область техники, к которой относится изобретение
Изобретение относится к авиации, а именно к аэродинамике несущего винта винтокрылого летательного аппарата, в частности к способу предотвращения попадания вертолета в зону режима «вихревого кольца» на предпосадочных маневрах в режиме висения.
Режим «вихревого кольца» являются особым режимом работы как одиночного, так и соосного несущего винта вертолетов и винтокрылых летательных аппаратов. Главной особенностью этого режима является глобальное нарушение законов струйного течения потока воздуха в области несущих винтов. Оно возникает при малой горизонтальной скорости вертолета на снижении. В этом режиме несущие винты не создают достаточной тяги, поэтому возникает плохая управляемость летательным аппаратом, самопроизвольное и непредсказуемое ускоренное снижение летательного аппарата.
Уровень техники
Известно, что на предпосадочных маневрах вертолета происходит попадание вертолета в режим «вихревого кольца» с неожиданной и резкой потерей высоты полета, что приводит к авариям и катастрофам вертолетной техники за счет неизбежных грубых посадок (публикация «Теория вертолета» / Джонсон У. - Мир, 1989, 108 с.).
Известен способ предотвращения винтокрылого аппарата в режим устойчивого «вихревого кольца» (CN 1784338А, В64С27/28, В64С27/57, публ. 07.06.2006), который осуществляется путем измерения подъемной силы несущего винта вертолета и создания на него бокового циклического возмущения при входе в режим «вихревого кольца».
Тем не менее, этот способ не позволяет предотвратить попадание винтокрылого аппарата в зону режима «вихревого кольца». Он снижает опасную ситуацию при попадании в режим «вихревого кольца», но не предотвращает самой ситуации.
Известен способ обнаружения и сигнализации о приближении к режиму «вихревого кольца» винтокрылого аппарата, включающий измерение на предварительных летных испытаниях тангенциальных и нормальных составляющих воздушной скорости потока вблизи несущего винта (CN 101808897А, В64С27/00, публ. 18.08.2010). По измеренным величинам осуществляют формирование границ возникновения режима «вихревого кольца» и проводят сравнение воздушной скорости вертолета и связанной с ней вертикальной скорости с граничными параметрами режима «вихревого кольца». При соответствии параметров режиму «вихревого кольца» осуществляют формирование сигнала предупреждения. При этом приемники воздушного давления установлены на двух плечах вращающегося рычага, установленного на штанге над несущим винтом винтокрылого аппарата.
Однако в известном способе тангенциальную и нормальную (осевую) скорости набегающего потока воздуха вблизи несущего винта определяют без учета их зависимости от угла атаки несущего винта, что значительно снижает точность определения режима «вихревого кольца» и момента запуска сигналов тревоги, увеличивая вероятность летных происшествий. Кроме того, усложнение конструкции несущего винта снижает надежность и влияет на траекторию полета при предпосадочных маневрах.
Наиболее близким к предполагаемому изобретению является способ определения и сигнализации о приближении несущего винта одновинтового вертолета к режиму «вихревого кольца» на предпосадочных маневрах (RU 2486596 C1, G08B21/00, В64С 27/00, публ. 27.06.2013), согласно которому измеряют на предварительных летных испытаниях с помощью системы измерителей тангенциальные и нормальные составляющие воздушной скорости вблизи несущего винта и по этим парным величинам формируют границы возникновения режима «вихревого кольца» винтокрылого аппарата. При этом точность формирования границ возникновения режима «вихревого кольца» увеличивается за счет учета угла атаки несущего винта. Затем в течение полета осуществляют сравнение воздушной скорости вертолета и связанной с ней вертикальной скорости с граничными параметрами режима «вихревого кольца» и при соответствии параметров формируют сигнал предупреждения.
Однако этот способ не предотвращает попадание вертолета в зону режима «вихревого кольца».
Известны граничные условия возникновения режима «вихревого кольца» (публикация «Динамика вертолета. Предельные режимы полета»/ Браверман А.С., Вайнтруб А.П. - М.: Машиностроение, 1988, 278 с). В данной на странице 193 работе приведены формулы (1) и (4) для расчета истинных воздушных скоростей, при которых на предпосадочных маневрах в режиме висения исключается попадание одновинтовых вертолетов в зону режима «вихревого кольца»:

где  - истинная продольная воздушная скорость винтокрылого летательного аппарата, км/ч;
- истинная продольная воздушная скорость винтокрылого летательного аппарата, км/ч;
m - текущая масса летательного аппарата, кг;
g - ускорение силы тяжести, м/с2;
ny - текущая перегрузка по вертикальной оси;
Δ - относительная плотность воздуха;

где Рн - статическое давление воздуха на высоте полета, мм рт.ст.;
Тн - температура наружного воздуха, градусы Кельвина;

где t - температура наружного воздуха на высоте полета, °С;
F - площадь, ометаемая винтами винтокрылого летательного аппарата, м2.

где  - истинная вертикальная воздушная скорость снижения винтокрылого летательного аппарата, м/с;
- истинная вертикальная воздушная скорость снижения винтокрылого летательного аппарата, м/с;
m - текущая масса летательного аппарата, кг;
g - ускорение силы тяжести, м/с2;
ny - текущая перегрузка по вертикальной оси;
Δ - относительная плотность воздуха;
F - площадь, ометаемая винтами винтокрылого летательного аппарата, м2.
Величины Δ и ny являются безразмерными.
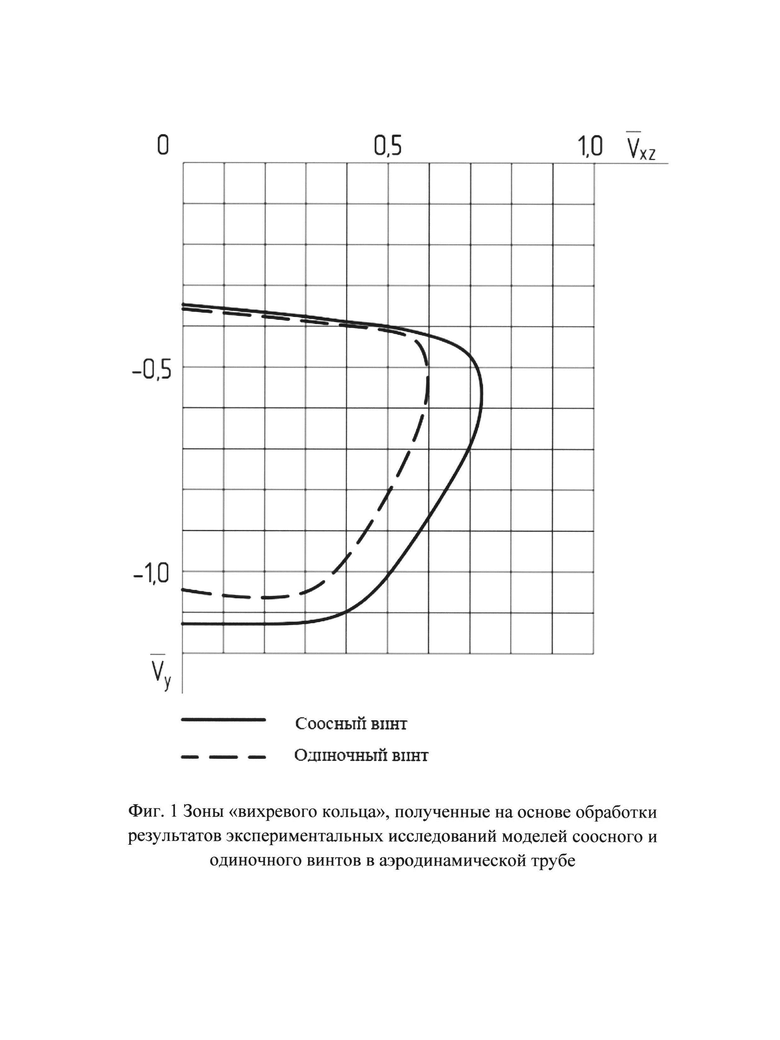
Известны результаты экспериментальных исследований зон «вихревого кольца» для одновинтовых и соосных вертолетов (публикация «Аэродинамика соосного вертолета» / Петросян Э.А. - Казань: Полигон-Пресс, 2004, 816 с.) которые отражены на фиг. 1, 2.
В указанной публикации Петросяна Э.А. на рис. 8.2.6, стр. 699 приведены графики зон «вихревого кольца» для соосного и одиночного винтов (фиг. 1). На графиках сплошной и пунктирной линией изображены границы зон «вихревого кольца» для соосного и одиночного винтов соответственно. Скорости представлены в безразмерных величинах  , где Vy - составляющая вектора скорости по оси вращения винта, Vxz - проекция вектора скорости на конструктивную плоскость вращения винта.
, где Vy - составляющая вектора скорости по оси вращения винта, Vxz - проекция вектора скорости на конструктивную плоскость вращения винта.
Зоны «вихревого кольца» ограничены осью  и построенными графиками, которые получены на основе обработки результатов экспериментальных исследований моделей соосного и одиночного винтов в аэродинамической трубе. В этих зонах между осью и построенными графиками происходит «провал» коэффициентов тяги винтов, и возникает самопроизвольное и непредсказуемое ускоренное снижение вертолета.
и построенными графиками, которые получены на основе обработки результатов экспериментальных исследований моделей соосного и одиночного винтов в аэродинамической трубе. В этих зонах между осью и построенными графиками происходит «провал» коэффициентов тяги винтов, и возникает самопроизвольное и непредсказуемое ускоренное снижение вертолета.
При отсутствии угла скольжения у вертолета скорость Vxz равна истинной продольной воздушной скорости  , a Vy равна истинной вертикальной воздушной скорости
, a Vy равна истинной вертикальной воздушной скорости  .
.
На предпосадочных маневрах в режиме висения вертолет может попасть в верхние границы этих зон, которые практически одинаковы как у одновинтовых вертолетов, так и у вертолетов соосной схемы (фиг. 1). Это означает, что формулы (1) и (2) верны как для одновинтовых вертолетов, так и для вертолетов с соосными несущими винтами.
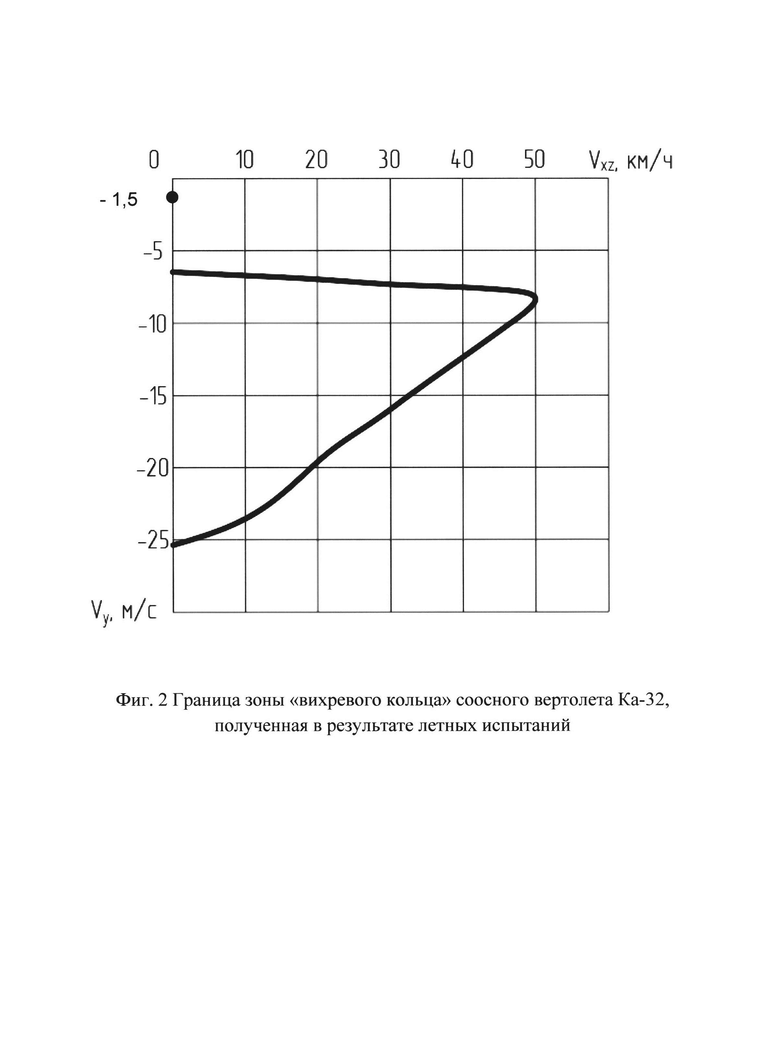
В указанной публикации Петросяна Э.А. на рис. 8.3.4, стр. 705 показана граница «вихревого кольца» вертолета Ка-32, полученная в результате летных испытаний (фиг. 2).
Раскрытие сущности изобретения
Техническая проблема, не решенная в известных устройствах, решение которой обеспечивается заявляемым изобретением, заключается в создании способа предотвращения попадания винтокрылого летательного аппарата в зону режима «вихревого кольца», что исключает возникновение вибраций, плохую управляемость летательным аппаратом, самопроизвольное и непредсказуемое ускоренное снижение летательного аппарата.
Это является актуальной задачей особенно с учетом тенденций создания опционально-пилотируемых вертолетов и обеспечения их безопасного пилотирования, как в ручном, так и в автоматическом режимах.
Технический результат заключается в повышении безопасности полетов винтокрылых летательных аппаратов на предпосадочных маневрах.
Для достижения технического результата предлагается способ предотвращения попадания винтокрылого летательного аппарата в зону режима «вихревого кольца» на предпосадочных маневрах в режиме висения, включающий измерение продольных и вертикальных истинных воздушных скоростей винтокрылого летательного аппарата, текущую массу летательного аппарата, текущую перегрузку по вертикальной оси, статическое давление на высоте полета, температуру наружного воздуха на высоте полета, отличающийся тем, что измеренные параметры подают в пилотажный вычислитель и формируют в нем сигналы, которые с помощью системы автоматического управления ограничивают истинные воздушные скорости винтокрылого летательного аппарата в соответствии неравенствами (5), (6):

где - истинная продольная воздушная скорость винтокрылого летательного аппарата, км/ч;
m - текущая масса летательного аппарата, кг;
g - ускорение силы тяжести, м/с2;
ny - текущая перегрузка по вертикальной оси;
Δ - относительная плотность воздуха;
где Рн - статическое давление воздуха на высоте полета, мм рт.ст.;
Тн - температура наружного воздуха, градусы Кельвина;
Тн=273+t,
где t - температура наружного воздуха на высоте полета, °С;
F - площадь, ометаемая винтами винтокрылого летательного аппарата, м2;

где - истинная вертикальная воздушная скорость снижения винтокрылого летательного аппарата, м/с;
m - текущая масса летательного аппарата, кг;
g - ускорение силы тяжести, м/с2;
ny - текущая перегрузка по вертикальной оси;
Δ - относительная плотность воздуха;
F - площадь, ометаемая винтами винтокрылого летательного аппарата, м2.
Кроме того, согласно способу предотвращения попадания винтокрылого летательного аппарата в зону режима «вихревого кольца» на предпосадочных маневрах в режиме висения для средних и тяжелых винтокрылых летательного аппаратов с массой более 3100 кг в управление вертолетом по вертикальному каналу вводят сигнал, пропорциональный ускорению истинной вертикальной воздушной скорости с величиной упреждения tупр, зависящей от массы винтокрылого летательного аппарата, согласно неравенству (7):

где - истинная вертикальная воздушная скорость снижения винтокрылого летательного аппарата, м/с;
m - текущая масса летательного аппарата, кг;
g - ускорение силы тяжести, м/с2;
ny - текущая перегрузка по вертикальной оси;
Δ - относительная плотность воздуха;
F - площадь, ометаемая винтами винтокрылого летательного аппарата, м2;
tупр - время упреждения, зависящее от массы винтокрылого летательного аппарата, сек;
 - ускорение истинной вертикальной воздушной скорости, м/с2.
- ускорение истинной вертикальной воздушной скорости, м/с2.
Кроме того, согласно способу предотвращения попадания винтокрылого летательного аппарата в зону режима «вихревого кольца» на предпосадочных маневрах в режиме висения при увеличении истинной высоты винтокрылого летательного аппарата во время проведения предпосадочного маневра по сигналу радиовысотомера изменяют маршрут полета винтокрылого летательного аппарата для его посадки на запасном аэродроме.
Кроме того, способ предотвращения попадания винтокрылого летательного аппарата в зону режима «вихревого кольца» на предпосадочных маневрах применяют на вертолетах.
Таким образом, достигается технический результат.
Достигается повышение безопасности полетов винтокрылых летательных аппаратов, в том числе, вертолетов, на предпосадочных маневрах за счет того, что в соответствии с предлагаемым способом предотвращения попадания винтокрылого летательного аппарата в зону режима «вихревого кольца» на предпосадочных маневрах в режиме висения измеряют продольные и вертикальные истинные воздушные скорости винтокрылого летательного аппарата, текущую массу летательного аппарата, текущую перегрузку по вертикальной оси, статическое давление на высоте полета, температуру наружного воздуха на высоте полета. Эти параметры подают в пилотажный вычислитель для формирования сигналов, которые с помощью системы автоматического управления ограничивают истинные воздушные скорости винтокрылого летательного аппарата до величин, исключающих его попадание в зону режима «вихревого кольца». При увеличении истинной высоты винтокрылого летательного аппарата во время проведения предпосадочного маневра по сигналу радиовысотомера изменяют маршрут полета винтокрылого летательного аппарата для его посадки на запасном аэродроме.
Краткое описание чертежей
Сущность предлагаемого изобретения поясняется чертежами:
На фиг. 1 изображены зоны «вихревого кольца», полученные на основе обработки результатов экспериментальных исследований моделей соосного и одиночного винтов в аэродинамической трубе.
На фиг. 2 изображены границы зоны «вихревого кольца» соосного вертолета Ка-32, полученные в результат летных испытаний.
Осуществление изобретения
В соответствии с предлагаемым способом предотвращения попадания винтокрылого летательного аппарата в зону режима «вихревого кольца» на предпосадочных маневрах в режиме висения измеряют продольные и вертикальные истинные воздушные скорости летательного аппарата, текущую массу летательного аппарата, текущую перегрузку по вертикальной оси, статическое давление на высоте полета, температуру наружного воздуха на высоте полета, входящие в формулы (1) и (4). Эти параметры подают в пилотажный вычислитель. Затем формирует в нем сигналы, которые с помощью системы автоматического управления, ограничивают истинные воздушные скорости винтокрылого летательного аппарата на предпосадочном маневре в соответствии с неравенствами (5), (6):

где - истинная продольная воздушная скорость винтокрылого летательного аппарата, км/ч;
m - текущая масса летательного аппарата, кг;
g - ускорение силы тяжести, м/с2;
ny - текущая перегрузка по вертикальной оси;
Δ - относительная плотность воздуха;
где Рн - статическое давление воздуха на высоте полета, мм рт.ст.;
Тн - температура наружного воздуха, градусы Кельвина;
Тн=273+t,
где t - температура наружного воздуха на высоте полета, °С;
F - площадь, ометаемая винтами винтокрылого летательного аппарата, м2.

где - истинная вертикальная воздушная скорость снижения винтокрылого летательного аппарата, м/с;
m - текущая масса летательного аппарата, кг;
g - ускорение силы тяжести, м/с2;
ny - текущая перегрузка по вертикальной оси;
Δ - относительная плотность воздуха;
F - площадь, ометаемая винтами винтокрылого летательного аппарата, м2.
На фиг. 1 изображены зоны «вихревого кольца», полученные на основе обработки результатов экспериментальных исследований моделей соосного и одиночного винтов в аэродинамической трубе. На предпосадочных маневрах в режиме висения вертолет может попасть в верхние границы этих зон, которые практически одинаковы как у одновинтовых вертолетов, так и у вертолетов соосной схемы.
Это указывает на то, что выполнение неравенств (5) и (6) исключает попадание в зону режима «вихревого кольца» на предпосадочных маневрах в режиме висения, как одновинтовых вертолетов с одиночным несущим винтом, так и вертолетов соосной схемы.
С целью повышения безопасности полетов средних и тяжелых винтокрылых летательных аппаратов с массой более 3100 кг, обладающих большой инерцией, в управление винтокрылым летательным аппаратом по вертикальному каналу вводят дополнительный сигнал упреждения, пропорциональный ускорению истинной вертикальной воздушной скорости, с величиной упреждения tупр, зависящей от массы винтокрылого летательного аппарата. При этом неравенство (6) преобразуется в неравенство (7):

где - истинная вертикальная воздушная скорость снижения винтокрылого летательного аппарата, м/с;
m - текущая масса летательного аппарата, кг;
g - ускорение силы тяжести, м/с2;
ny - текущая перегрузка по вертикальной оси;
Δ - относительная плотность воздуха;
F - площадь, ометаемая винтами винтокрылого летательного аппарата, м2;
tупр - время упреждения, зависящее от массы винтокрылого летательного аппарата, сек;
 - ускорение истинной вертикальной воздушной скорости, м/с2.
- ускорение истинной вертикальной воздушной скорости, м/с2.
Истинная вертикальная воздушная скорость снижения винтокрылого летательного аппарата является суммой скоростей: скорости снижения винтокрылого летательного аппарата относительно Земли и скорости воздушного потока, направленного вверх. При скорости воздушного потока, направленной вверх, больше допустимой скорости снижения винтокрылого летательного аппарата, указанной в неравенстве (6), система автоматического управления вертолета на предпосадочном маневре начнет увеличивать истинную высоту винтокрылого летательного аппарата. С целью исключения попадания винтокрылого летательного аппарата в режим «вихревого кольца» в этом случае при увеличении истинной высоты винтокрылого летательного аппарата во время проведения предпосадочного маневра навигационный вычислитель по сигналу радиовысотомера изменяет маршрут полета для посадки винтокрылого летательного аппарата на запасном аэродроме.
Предлагаемый способ предотвращения попадания винтокрылого летательного аппарата в зону режима «вихревого кольца» на предпосадочных маневрах применяют, в том числе, на вертолетах.
Таким образом, технический результат, заключающийся в повышении безопасности полетов винтокрылых летательных аппаратов, в том числе, вертолетов, на предпосадочных маневрах, достигается за счет ограничения вертикальных истинных воздушных скоростей в зависимости от продольных истинных воздушных скоростей до величин, исключающих попадание винтокрылого летательного аппарата в зону режима «вихревого кольца».
Пример осуществления изобретения приведем на вертолете типа Ка-32 (Ка-32А11 ВС). Проведем оценку допустимой вертикальной скорости снижения вертолета Ка-32 (Ка-32А11 ВС) на предпосадочных маневрах в режиме висения, при которых исключается их попадание в зону режима «вихревого кольца» по предлагаемому способу.
Расчет допустимой вертикальной скорости снижения будем вести при перегрузке 1,0, стандартной атмосфере (давление 760 мм рт.ст., температура +15°С).

При этих параметрах относительная плотность воздуха равна:

Параметры вертолета Ка-32 (Ка-32А11 ВС), необходимые для расчетов, следующие: текущая масса летательного аппарата равна 11000 кг; радиус несущего винта равен 7,95 м.
Допустимая вертикальная скорость снижения на висении вертолета типа Ка-32 по предлагаемому способу:

На фиг. 2 представлена граница зоны «вихревого кольца», полученная в результате летных испытаний вертолета Ка-32. Он показывают, что на висении при указанных параметрах вертолет Ка-32 входит в зону «вихревого кольца» при скорости снижения равной 6 м/с. Таким образом, при допустимой вертикальной скорости снижения равной минус 1,5 м/с имеется значительный запас по скорости, обеспечивающий исключение попадания вертолета типа Ка-32 в зону режима «вихревого кольца». Это указывает, что предлагаемый способ обеспечивает на предпосадочных маневрах в режиме висения скорость посадки винтокрылых аппаратов, в том числе вертолетов, значительно меньше, чем скорость вхождения летательных аппаратов в «вихревое кольцо».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ И СИГНАЛИЗАЦИИ О ПРИБЛИЖЕНИИ НЕСУЩЕГО ВИНТА К ЗОНЕ РЕЖИМОВ "ВИХРЕВОГО КОЛЬЦА" НА ПРЕДПОСАДОЧНЫХ МАНЕВРАХ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2486596C1 |
| СТАРТОВАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ КРИТИЧЕСКИХ РЕЖИМОВ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497718C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
| ВОЗДУШНЫЙ ВИНТ С УПРАВЛЯЕМЫМИ ЗАКОНЦОВКАМИ ЛОПАСТЕЙ | 2021 |
|
RU2788116C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ | 2019 |
|
RU2729891C1 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2796703C2 |
| НЕСУЩИЙ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2385268C1 |
Изобретение относится к авиации, а именно к аэродинамике несущего винта винтокрылого аппарата, в частности к способу предотвращения попадания винтокрылых летательных аппаратов, в том числе вертолетов, в зону режима «вихревого кольца» на предпосадочных маневрах в режиме висения. Техническим результатом является повышение безопасности полетов винтокрылого летательного аппарата за счет предотвращения попадания их в зону режима «вихревого кольца». Результат достигается за счет автоматического поддержания истинных продольных и вертикальных воздушных скоростей в пределах, при которых исключается попадание винтокрылых летательных аппаратов в зону режима «вихревого кольца». Для выполнения упомянутого автоматического поддержания измеряют продольные и вертикальные истинные воздушные скорости летательного аппарата, текущую массу летательного аппарата, текущую перегрузку по вертикальной оси, статическое давление на высоте полета, температуру наружного воздуха на высоте полета. По измеренным параметрам формируют сигналы, которые с помощью системы автоматического управления вертолета ограничивают его истинные воздушные скорости до величин, исключающих попадание винтокрылого летательного аппарата в зону режима «вихревого кольца». 3 з.п. ф-лы, 2 ил.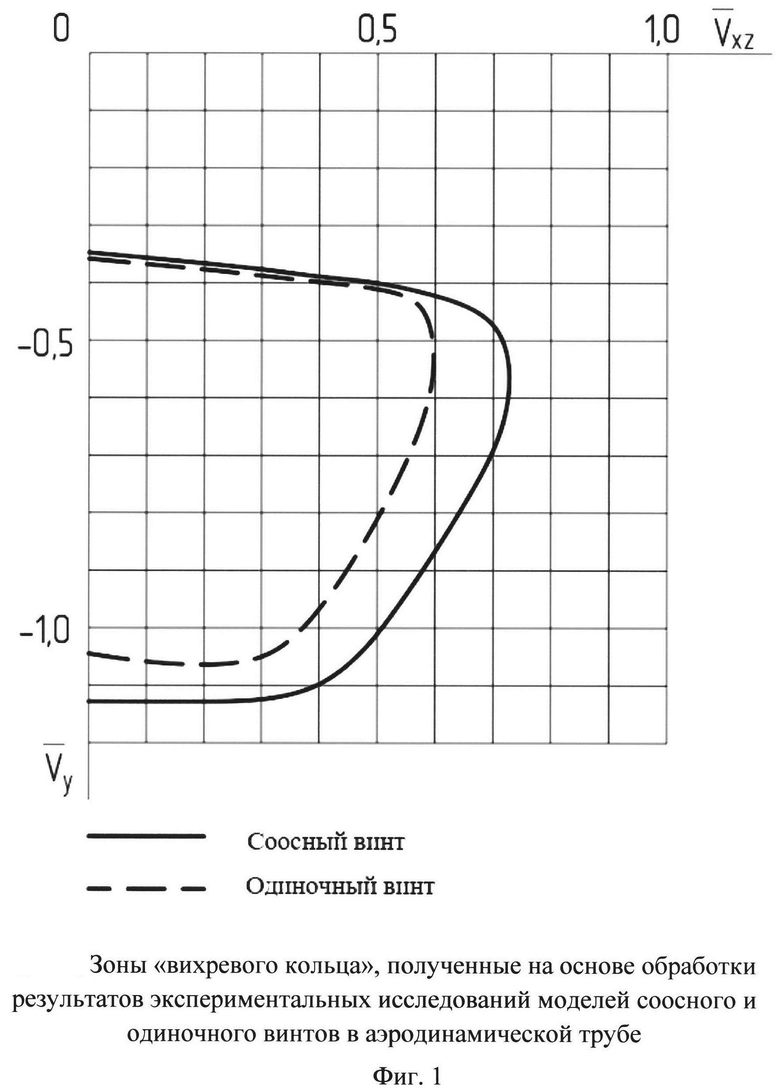
1. Способ предотвращения попадания винтокрылого летательного аппарата в зону режима «вихревого кольца» на предпосадочных маневрах в режиме висения, включающий измерение продольных и вертикальных истинных воздушных скоростей винтокрылого летательного аппарата, текущую массу летательного аппарата, текущую перегрузку по вертикальной оси, статическое давление на высоте полета, температуру наружного воздуха на высоте полета, отличающийся тем, что измеренные параметры подают в пилотажный вычислитель и формируют в нем сигналы, которые с помощью системы автоматического управления ограничивают истинные воздушные скорости винтокрылого летательного аппарата в соответствии неравенствами (5), (6):

где  - истинная продольная воздушная скорость винтокрылого летательного аппарата, км/ч;
- истинная продольная воздушная скорость винтокрылого летательного аппарата, км/ч;
m - текущая масса летательного аппарата, кг;
g - ускорение силы тяжести, м/с2;
ny - текущая перегрузка по вертикальной оси;
Δ - относительная плотность воздуха;
где Рн - статическое давление воздуха на высоте полета, мм рт.ст.;
Тн - температура наружного воздуха, градусы Кельвина;
Тн=273+t,
где t - температура наружного воздуха на высоте полета, °С;
F - площадь, ометаемая винтами винтокрылого летательного аппарата, м2.

где  - истинная вертикальная воздушная скорость снижения винтокрылого летательного аппарата, м/с;
- истинная вертикальная воздушная скорость снижения винтокрылого летательного аппарата, м/с;
m - текущая масса летательного аппарата, кг;
g - ускорение силы тяжести, м/с2;
ny - текущая перегрузка по вертикальной оси;
Δ - относительная плотность воздуха;
F - площадь, ометаемая винтами винтокрылого летательного аппарата, м2.
2. Способ предотвращения попадания винтокрылого летательного аппарата в зону режима «вихревого кольца» на предпосадочных маневрах в режиме висения по п. 1 отличающийся тем, что для средних и тяжелых винтокрылых летательных аппаратов с массой более 3100 кг в управление вертолетом по вертикальному каналу вводят сигнал, пропорциональный ускорению истинной вертикальной воздушной скорости с величиной упреждения tупр, зависящей от массы винтокрылого летательного аппарата, согласно неравенству (7):

где - истинная вертикальная воздушная скорость снижения винтокрылого летательного аппарата, м/с;
m - текущая масса летательного аппарата, кг;
g - ускорение силы тяжести, м/с2;
ny - текущая перегрузка по вертикальной оси;
Δ - относительная плотность воздуха;
F - площадь, ометаемая винтами винтокрылого летательного аппарата, м2;
tупр - время упреждения, зависящее от массы винтокрылого летательного аппарата, сек;
 - ускорение истинной вертикальной воздушной скорости, м/с2.
- ускорение истинной вертикальной воздушной скорости, м/с2.
3. Способ предотвращения попадания винтокрылого летательного аппарата в зону режима «вихревого кольца» на предпосадочных маневрах в режиме висения по любому из пп. 1 или 2, отличающийся тем, что при увеличении истинной высоты винтокрылого летательного аппарата во время проведения предпосадочного маневра по сигналу радиовысотомера изменяют маршрут полета винтокрылого летательного аппарата для его посадки на запасном аэродроме.
4. Способ предотвращения попадания винтокрылого летательного аппарата в зону режима «вихревого кольца» на предпосадочных маневрах в режиме висения по любому из пп. 1-3, отличающийся тем, что способ применяют на вертолетах.
| СПОСОБ ОПРЕДЕЛЕНИЯ И СИГНАЛИЗАЦИИ О ПРИБЛИЖЕНИИ НЕСУЩЕГО ВИНТА К ЗОНЕ РЕЖИМОВ "ВИХРЕВОГО КОЛЬЦА" НА ПРЕДПОСАДОЧНЫХ МАНЕВРАХ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2486596C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| Устройство для разгрузки зерна из бункера, например комбайна, в движущуюся тележку | 1959 |
|
SU122983A1 |
| US 7004426 B2, 2006.02.28 | |||
| US 2022355919 A1, 2022.11.10 | |||
| CN 110901897 A, 2020.03.24 | |||
| US 7907066 B2, 2011.03.15 | |||
| US 11554855 B2, 2023.01.17. | |||

