Изобретение относится к области машиностроения, в частности к деформирующим инструментам, которые используются при инкрементальном формообразовании.
Инкрементальное формообразование представляет собой процесс обработки листового материала, в котором заготовка локально деформируется пуансоном со сферическим торцом путем перемещения одного или нескольких инструментов вдоль заданного направления. Концевые части заготовки при этом жестко фиксируются между нижней плитой и прижимом. Технология позволяет работать с конструкционными, нержавеющими, высокопрочными и оцинкованными сталями, цветными металлами, титаном и другими материалами.
Известен силомоментный датчик (патент RU209704, МПК G01L 5/16, опубл. 18.03.2022), который выполнен в виде цилиндрического корпуса. В который установлена плата управления, монтажная пластина, имеющая крепления для установки датчика на манипулятор, упругий элемент в виде креста с четырьмя плечами, в центральной части которого выполнено четыре резьбовых отверстия, в каждом плече выполнен вырез, делящий его на две части и образующий по четыре измерительные площадки на каждом плече. На краях плеч выполнены отверстия для крепления в цилиндрическом корпусе. Лицевая панель устанавливается на упругий элемент через резьбовые отверстия и связана с корпусом через герметизирующее уплотнение. На передней части лицевой панели выполнены резьбовые отверстия для установки инструмента и оснастки, так же имеются отверстия для установки винтов, служащих для регулировки зазора между ней и корпусом.
Недостатком данного решения является достаточно сложная конструкция. Также датчик подобной конструкции не способен выдержать те нагрузки, которые предполагает инкрементальное формообразование.
Известен датчик силы (патент RU 216434, МПК G01L 1/22, опубл. 03.02.2023), содержащий корпус в виде цилиндра, с поршневым рычагом, одна из его головок представляет собой основание поршневого рычага, а вторая сторона представляет собой головку, в виде твердого шара диаметром около 5 мм, касающегося измеряемого участка. В цилиндре устроен паз, расположенный вдоль продольной оси цилиндра. Сверху цилиндра установлен линейный резистор переменный, содержащий соединительные провода и маленькую рукоять длиной около мм, рукоять резистора соединена с другим пазом, расположенным у основания поршневого рычага, перед основанием поршневого рычага установлена первая пружина, а вторая пружина после него (с целью получения нулевого положения датчика, когда не будет внешнего воздействия). Датчик силы также содержит гайку, расположенную на расстоянии около 20 мм от головки цилиндра, для крепления датчик силы.
Недостатком данного решения является возможность измерения усилия только вдоль оси датчика, а также невозможность одновременного воспроизведения инкрементального формообразования.
Наиболее близким аналогом является датчик силы (патент RU2795669, МПК G01L 1/22, опубл. 05.05.2023), содержит мост тензорезисторов, который изготавливается из фольги в дискретно-распределенном исполнении в виде четырех тензорезисторов, расположенных на подложке. При этом мост состоит из двух цепочек поперечно расположенных дискретных резисторов и двух цепочек продольно расположенных резисторов. Каждый из четырех тензорезисторов представляет непрерывную вытянутую в продольном направлении цепочку, при этом продольные и поперечные цепочки поочередно чередуются между собой и объединены в единую конструкцию с помощью четырех контактных площадок, расположенных на краях цепочек.
Основным недостатком устройства является сложность в его изготовлении, а также недостаточная прочность конструкции для произведения инкрементального формообразования.
Техническим результатом предлагаемого решения является увеличение чувствительности и точности измерения сил и моментов при инкрементальном формообразовании, а также повышение качества получаемых изделий.
Технический результат достигается за счет того, что деформирующий инструмент, содержащий корпус с рабочим элементом, связанным с тензометрическими датчиками, включает в свой состав основание с двумя боковыми неразъемными стенками, две боковые грани, нижнюю крышку и верхнюю крышку, причем в центральной части основания установлен тензометрический датчик с возможностью измерения усилия, направленного вдоль вертикальной оси рабочего элемента в виде цилиндрического пуансона, а в центральной части каждой из боковых неразъемных стенок основания также установлен тензометрический датчик с возможностью измерения усилия на рабочий элемент вдоль оси перпендикулярной боковым неразъемным стенкам основания, при этом две боковые грани закреплены на основании и таким же образом имеют на своих центральных частях, установленные с возможностью измерения усилия рабочего элемента вдоль оси перпендикулярной боковым граням, тензометрические датчики, нижняя крышка корпуса закреплена на верхних частях боковых стенок основания и боковых граней, причем в ней установлена тарельчатая пружина, на которой размещена нижняя часть вставки со сферой, удерживаемой верхней частью вставки, которая, в свою очередь, зафиксирована верхней крышкой путем ее разъемного соединения с нижней крышкой, при этом рабочий элемент установлен в сфере с возможностью осевого перемещения, вращательного движения вместе со сферой, а также воздействия своей нижней частью на имеющиеся в инструменте тензометрические датчики.
Устройство представляет собой приспособление для измерения усилий процесса инкрементального формообразования в различных направлениях и в каждой точке нахождения деформирующего инструмента, что в комплексе с программным обеспечением, решающим задачи систематизации, аналитического анализа и последующей визуализации полученных данных, позволяет получить сведения о ходе процесса, что повышает имеющиеся показатели точности. Определение значений, действующих в каждый момент времени процесса, сил позволяет получить более четкое понимание изменения макро и микроструктуры обрабатываемого материала, более детально изучить его свойства, произвести сравнительный анализ и выявить индивидуальные положительные характеристики процесса.
Использование сферы для установки пуансона и тензометрических датчиков, расположенных по трем осям, позволяет увеличить чувствительность и точность измерения сил и моментов при инкрементальном формообразовании, а также, соответственно, повысить качество получаемых изделий
Сущность технического решения поясняется следующими чертежами:
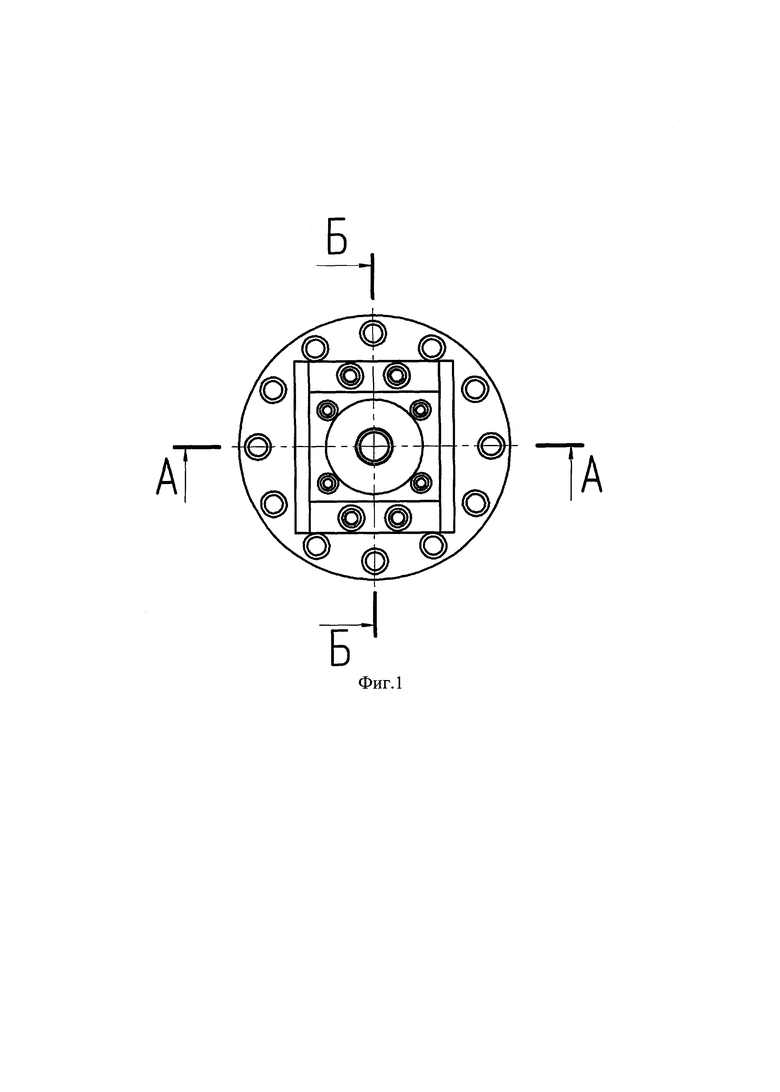
- на фиг. 1 изображен вид сверху деформирующего инструмента;
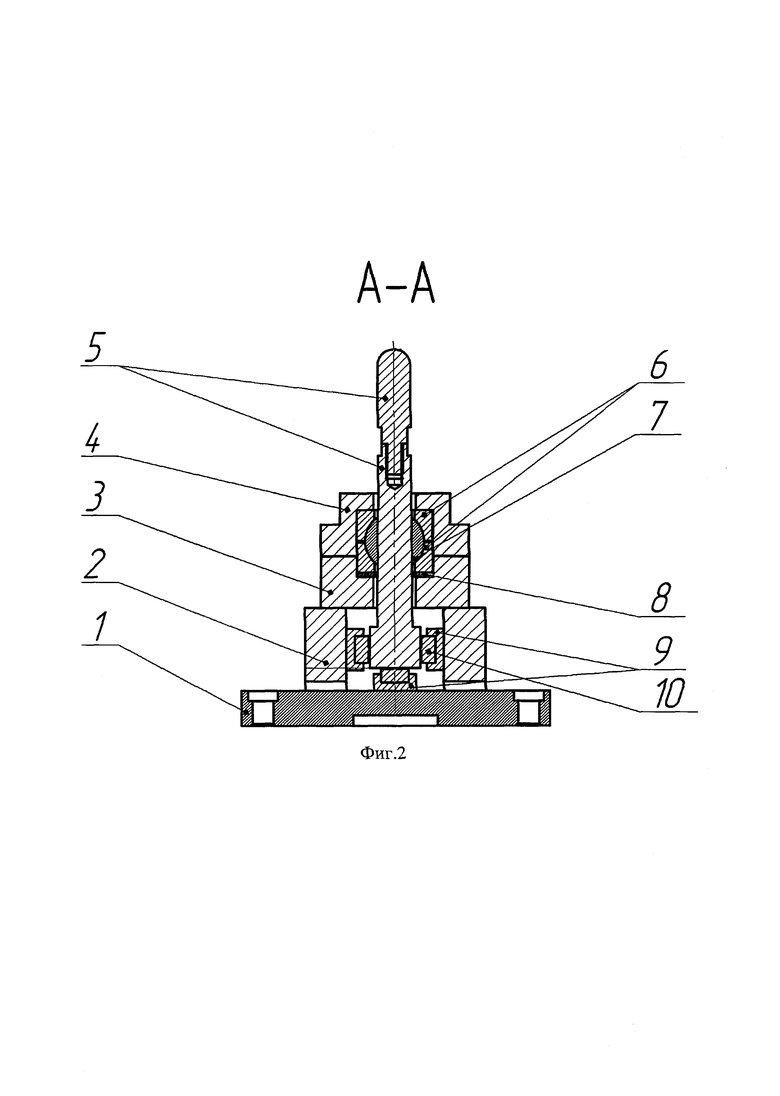
- на фиг. 2 изображен разрез А-А деформирующего инструмента;
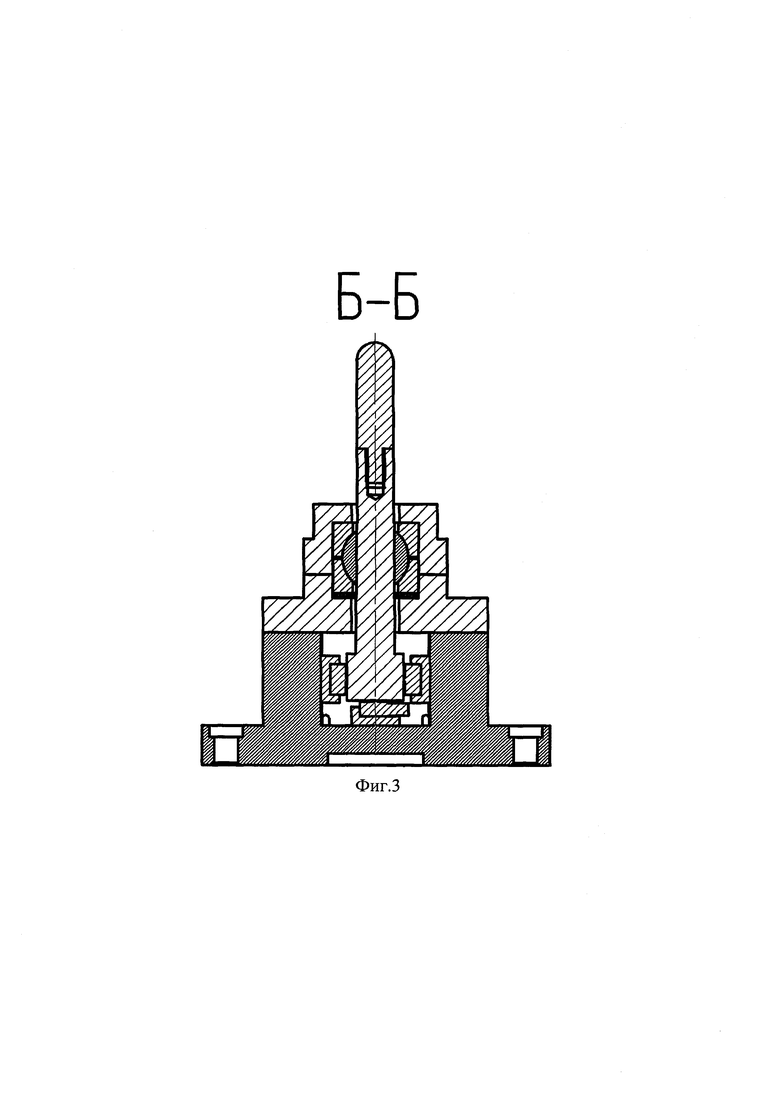
- на фиг. 3 изображен разрез Б-Б деформирующего инструмента.
Деформирующий инструмент включает в свой состав корпус, который содержит основание (1), две боковые грани (2), нижнюю крышку (3) и верхнюю крышку (4), рабочий элемент в виде пуансона (5), вставка (6), в которую установлена сфера (7), тарельчатую пружину (8), переходники для датчиков (9) и тензодатчики (10).
Сборка устройства осуществляется следующим образом.
В центральных частях нижней плиты основания, а также боковых неразъемных стенках основания (1) и боковых съемных гранях (2) устанавливают через переходники(9) тензометрические датчики (10). Производят установку боковых граней (2) между боковыми стенками основания (1) образую прямоугольную полость. Далее устанавливают в эту полость пуансон (5) нижней частью плотно прижимая к датчикам. Сверху через пуансон (5) устанавливают нижнюю крышку (3) на верхних гранях боковых стенок основания (1) и съемных боковых гранях (2). Через пуансон (5) в полость нижней крышки (3) устанавливают тарельчатую пружину (8), затем на нее сверху нижнюю часть вставки (6), далее сферу (7), верхнюю часть вставки (6), после чего закрывают и фиксируют все детали верхней крышкой (4). Таким образом пуансон (5) опирается на тензодатчики (10) и средней часть взаимодействует со сферой (7), которая в свою очередь имеет возможность вращения внутри вставки (6).
Устройство работает следующим образом.
При осуществлении инкрементального формообразования при перемещении инструмента вдоль заданного направления пуансон (5) со сферическим торцом осуществляет давление на заготовку. Если сила действует по оси пуансона (5), то измерение производит тензодатчик, установленный в центральной части нижней плиты основания (1). Если сила действует в ином направлении, то за счет возможности поворота пуансона благодаря тому, что он установлен в сфере, измерения могут производить тензодатчики, установленные на боковых стенках основания и боковых съемных гранях (2).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения величины контактных усилий | 2023 |
|
RU2819196C1 |
| Штамп для выдавливания заготовок | 1989 |
|
SU1736669A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ СИЛ ПРИ ЭЛЕКТРОАЛМАЗНОМ ШЛИФОВАНИИ | 2001 |
|
RU2215641C2 |
| Способ повышения точности перемещений промышленного робота в процессе инкрементального формообразования | 2020 |
|
RU2762693C1 |
| СПОСОБ ПРЕССОВАНИЯ МЕТАЛЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2306994C1 |
| Способ формообразования деталей сужающейся формы с концентрическим эллиптическим сечением и донной частью | 2023 |
|
RU2839597C2 |
| Способ и устройство для штамповки блингов | 2021 |
|
RU2769333C1 |
| Штамп для изготовления изделий с лезвиями типа рабочих органов сельскохозяйственных машин | 1983 |
|
SU1123783A1 |
| Инструмент для поверхностного упрочнения металлических деталей | 2023 |
|
RU2829560C1 |
| ЕМКОСТНЫЙ СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 2011 |
|
RU2483283C2 |
Изобретение относится к области машиностроения. Деформирующий инструмент содержит корпус, включающий основание с двумя боковыми стенками, две боковые грани, нижнюю крышку и верхнюю крышку. В центральной части основания установлен тензометрический датчик для измерения усилия, направленного вдоль вертикальной оси рабочего элемента. В центральной части каждой из боковых неразъемных стенок основания также установлен тензометрический датчик для измерения усилия на рабочий элемент вдоль оси, перпендикулярной боковым неразъемным стенкам основания. Две боковые грани закреплены на основании и имеют на своих центральных частях установленные с возможностью измерения усилия рабочего элемента вдоль оси, перпендикулярной боковым граням, тензометрические датчики. Нижняя крышка корпуса закреплена на верхних частях боковых стенок основания и боковых граней, причем в ней установлена тарельчатая пружина, на которой размещена нижняя часть вставки со сферой, удерживаемой верхней частью вставки, которая, в свою очередь, зафиксирована верхней крышкой. Рабочий элемент установлен в сфере с возможностью осевого перемещения, вращательного движения вместе со сферой, а также воздействия своей нижней частью на имеющиеся в инструменте тензометрические датчики. Технический результат: увеличение чувствительности и точности измерения сил и моментов при инкрементальном формообразовании, а также повышение качества получаемых изделий. 3 ил.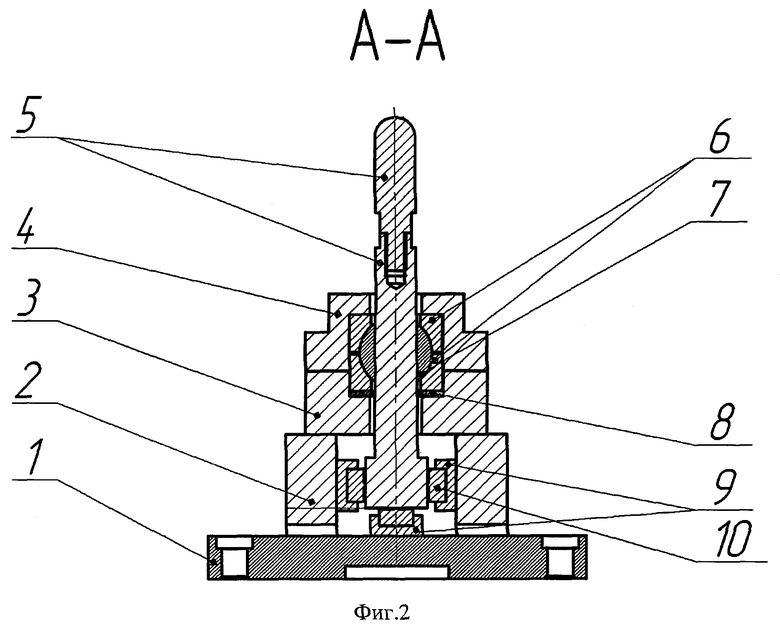
Деформирующий инструмент, содержащий корпус с рабочим элементом, связанным с тензометрическими датчиками, отличающийся тем, что корпус включает в свой состав основание с двумя боковыми неразъемными стенками, две боковые грани, нижнюю крышку и верхнюю крышку, причем в центральной части основания установлен тензометрический датчик с возможностью измерения усилия, направленного вдоль вертикальной оси рабочего элемента в виде цилиндрического пуансона, а в центральной части каждой из боковых неразъемных стенок основания также установлен тензометрический датчик с возможностью измерения усилия на рабочий элемент вдоль оси, перпендикулярной боковым неразъемным стенкам основания, при этом две боковые грани закреплены на основании и таким же образом имеют на своих центральных частях установленные с возможностью измерения усилия рабочего элемента вдоль оси, перпендикулярной боковым граням, тензометрические датчики, нижняя крышка корпуса закреплена на верхних частях боковых стенок основания и боковых граней, причем в ней установлена тарельчатая пружина, на которой размещена нижняя часть вставки со сферой, удерживаемой верхней частью вставки, которая, в свою очередь, зафиксирована верхней крышкой путем ее разъемного соединения с нижней крышкой, при этом рабочий элемент установлен в сфере с возможностью осевого перемещения, вращательного движения вместе со сферой, а также воздействия своей нижней частью на имеющиеся в инструменте тензометрические датчики.
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2022 |
|
RU2795669C1 |
| Динамометр | 1960 |
|
SU140251A1 |
| 1972 |
|
SU416125A1 | |
| CN 102095534 A, 15.06.2011. | |||

