(54)
1
Изобретение относится к тракторостроению, |В частности к системе управления гидравлическими передачами технологических транспортных тележек, шарнирно связанных с транспортным средством.
Наиболее близким по техническому решению к предлагаемому изобретению является устройство управления гидропередачами технологических : тележек транспортного средства, шарнирно соединенных с ним и приводимых в действие посредством тяговых гидромоторов, питаемых от регулируемых гидронасосов, содержащее датчики усилий с рабочими полостями и чувствительные элементы, кинематически связанные посредством рычагов и тяг с гидравлическими исполнительными мехагазмами управле1шя гидронасосов, гидравлически соединенных посредством гидролиний с источниками питания и гидробаком 11.
Недостатком данного устройства управления является то, что при повороте трактора и двух технологических тележек с индивидуальными гидропередачами и устройством управления, наблюдается разность усилий в тягах
и пропорциональная этому разница деформаций пружин датчиков или угловое отклонение трактора относительно технологических тележек. Поэтому у известного устройства низкая точность управления поворотом агрегата.
Цель изобретения - улучшение управляемости путем повышения точности управления поворотом транспортного средства.
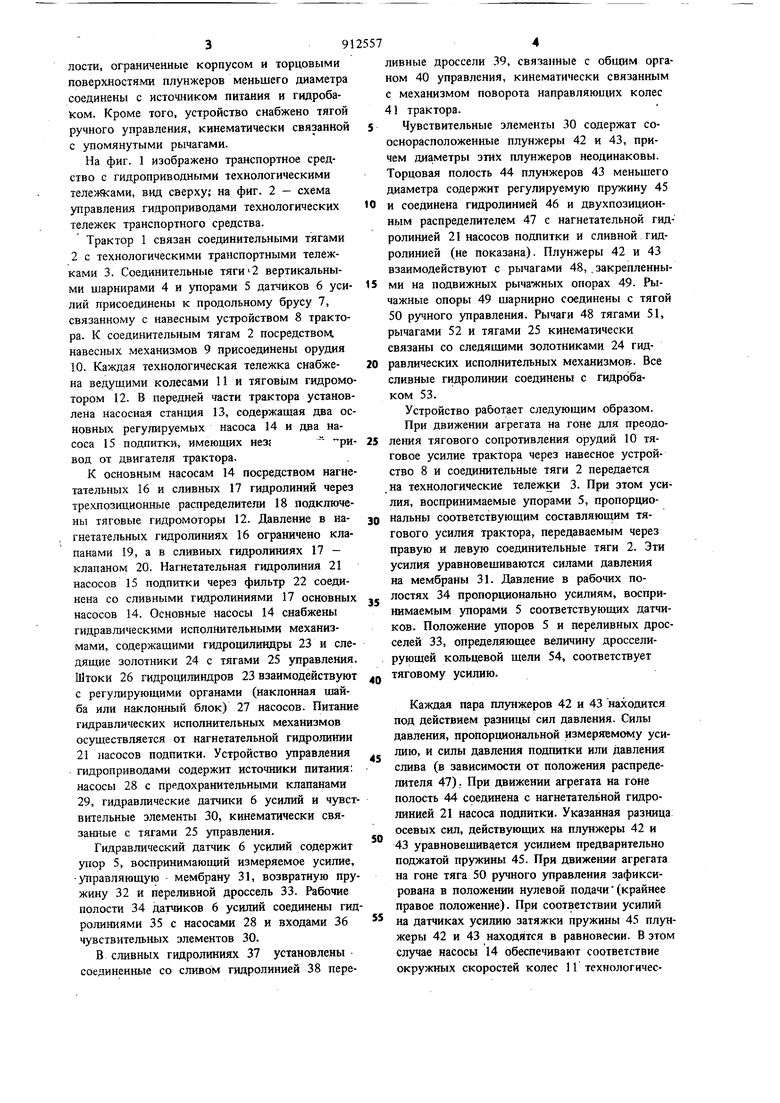
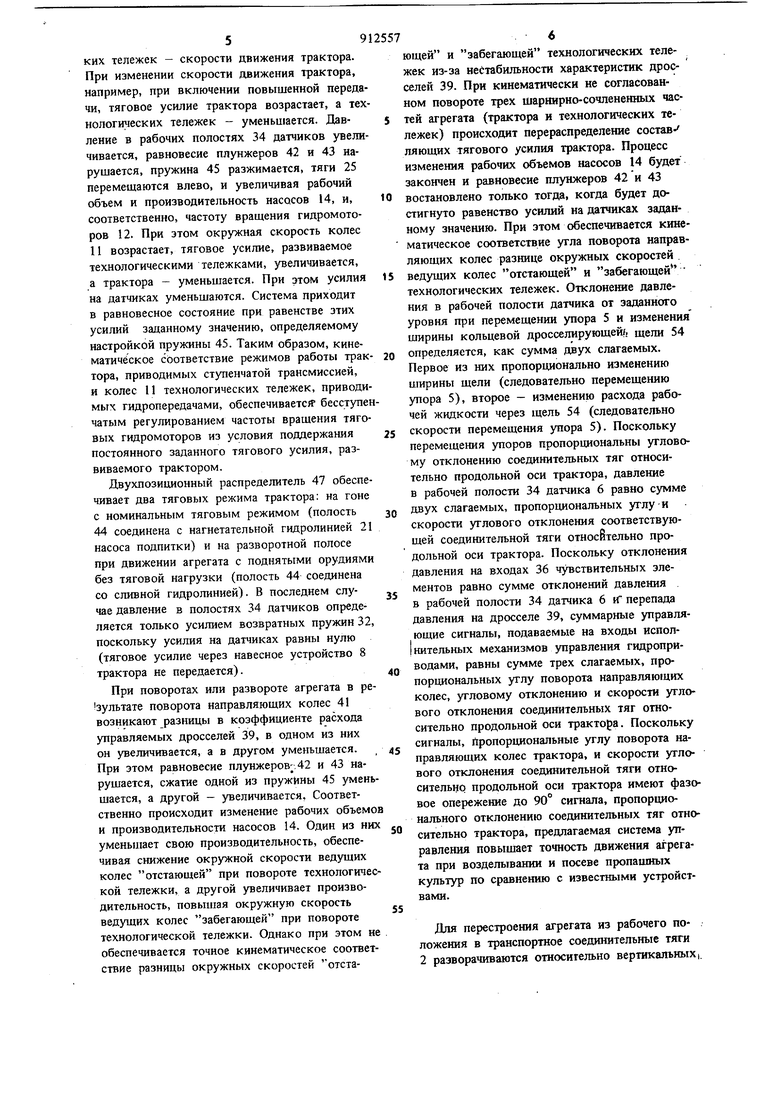
Указанная цель достигается тем, что устtaройство снабжено установленными в гидролиниях, соединяющих датчики усилий с падробаком, двумя регулируемыми дросселями с общим органом управления, кинематически связанным с механизмом управления транспорт15ного средства, причем рабочие полости Датчиков усилий соединены с источниками питания и входами чувствительных элементов, каж дый из которых выполнен в виде двух соосно расположенных и подпружиненных плунжеров разного диаметра, при этом входы чувствительных элементов образованы полостями с ограни юнными корпусом и торцовой поверхностью плунжеров большего диаметра, а поУСТРОЙСТВО УПРАВЛЕНИЯ ГИДГОПЕРЕДАЧАМИ ТЕХНОЛОГИЧЕСКИХ ТЕЛЕЖЕК ТРАНСПОРТНОГО СРЕДСТВА 39 лости, ограниченные корпусом и торцовыми поверхностями плунжеров меньшего диаметра соединены с источником питания и гидробаком. Кроме того, устройство снабжено тягой ручного управления, кинематически связанной с упомянутыми рычагами. На фиг. 1 изображено транспортное средство с гидроприводными технологическими телеявсами, вид сверху на фиг. 2 - схема управления гидроприводами технологических тележек транспортного средства. Трактор 1 связан соединительными тягами 2 с технологическими транспортными тележками 3. Соединительные тяги2 вертикальными шарнирами 4 и упорами 5 датчиков 6 усиЛИЙ присоединены к продольному брусу 7, связанному с навесным устройством 8 трактора. К соединительным тягам 2 посредством, навесных механизмов 9 присоединены орудия 10. Каждая технологическая тележка снабжена ведущими колесами 11 и тяговым гидромо тором 12. В передней части трактора установлена насосная станция 13, содержащая два основных регулируемых насоса 14 и два насоса 15 подпитки, имеющих незг ривод от двигателя трактора. К основным насосам 14 посредством нагнетательных 16 и сливных 17 гидролиний через трехпозиционные распределители 18 подключены тяговые гидромоторы 12. Давление в нагнетательных гидролиниях 16 ограничено клапанами 19, а в сливных гидролиниях 17 - клапаном 20. Нагнетательная гидролиния 21 насосов 15 подпитки через фильтр 22 соединена со сливными гидролиниями 17 основных насосов 14. Основные насосы 14 снабжены гидравлическими исполнительными механизмами, содержащими гидроцилиндры 23 и следящие золотники 24 с тягами 25 управления. Штоки 26 гидроцилиндров 23 взаимодействуют с регулирующими органами (наклонная щайба или наклонный блок) 27 насосов. Питание гидравлических исполнительных механизмов осуществляется от нагнетательной гидролинии 21 iiacocoB подпитки. Устройство управления гидроприводами содержит источники питания: насосы 28 с предохранительными клапанами 29, гидравлические датчики 6 усилий и чувствительные элементы 30, кинематически связанные с тягами 25 управления. Гидравлический датчик 6 усилий содержит унор 5, воспринимающий измеряемое усилие, управляющую мембрану 31, возвратную пружину 32 и переливной дроссель 33. Рабочие полости 34 датчиков 6 усилий соединены гид ролиниями 35 с насосами 28 и входами 36 чувствительных элементов 30. В сливных гндролиниях 37 установлены соединенные со сливом гидролинией 38 переливные дроссели 39, связанные с общим органом 40 управления, кинематически связанным с механизмом поворота направляющих колес 41 трактора. Чувствительные элементы 30 содержат сооснорасположенные плунжеры 42 и 43, причем диаметры этих плунжеров неодинаковы. Торцовая полость 44 плунжеров 43 меньшего диаметра содержит регулируемую пружину 45 и соединена гидролинией 46 и двухпозиционным распределителем 47 с нагнетательной гидролинией 21 насосов подпитки и сливной гидролинией (не показана). Плунжеры 42 и 43 взаимодействуют с рычагами 48, , закрепленными на подвижных рычажных опорах 49. Рычажные опоры 49 щарнирно соединены с тягой 50 ручного управления. Рычаги 48 тягами 51, рычагами 52 и тягами 25 кинематически связаны со следящими золотниками 24 гидравлических исполнительных механизмов. Все сливные гидролинии соединены с гидробаком 53. Устройство работает следующим образом. При движении агрегата на гоне для преодоления тягового сопротивления орудий 10 тяговое усилие трактора через навесное устройство 8 и соединительные тяги 2 передается на технологические тележки 3. При этом усилия, воспринимаемые упорами 5, пропорциональны соответствующим составляюц;им тягового усилия трактора, передаваемым через правую и левую соединительные тяги 2. Эти усилия уравновешиваются силами давления на мембраны 31. Давление в рабочих полостях 34 пропорционально усилиям, воспринимаемым упорами 5 соответствующих датчиков. Положение упоров 5 и переливных дросселей 33, определяющее величину дросселирующей кольцевой щели 54, соответствует тяговому усилию. Каждая пара плунжеров 42 и 43 находится под действием разницы сил давления. Силы давления, пропорциональной измеряемому усилию, и силы давления подпитки или давления слива (в зависимости от положения распределителя 47). При движении агрегата на гоне полость 44 соединена с нагнетательной гидролинией 21 насоса подпитки. Указанная разница осевых сил, действующих на плунжеры 42 и 43 уравновешивается усилием предварительно поджатой пружины 45. При движении агрегата на гоне тяга 50 ручного управления зафиксирована в положении нулевой подачи (крайнее правое положение). При соответствии усилий на датчиках усилию затяжки пружины 45 плунжеры 42 и 43 находятся в равновесии. В этом случае насосы 14 обеспечивают соответствие окружных скоростей колес И технологичес59ких тележек - скорости движения трактора. При изменении скорости движения трактора, например, при включении повышенной передачи, тяговое усилие трактора возрастает, а тех нологи 1еских тележек - уменьшается. Давление в рабочих полостях 34 датчиков увеличивается, равновесие плунжеров 42 и 43 нарушается, пружина 45 разжимается, тяги 25 перемещаются влево, и увеличивая рабочий объем и производительность насосов 14, и, соответственно, частоту вращения гидромоторов 12. При этом окружная скорость колес 11 возрастает, тяговое усилие, развиваемое технологическими тележками, увеличивается, а трактора - уменьшается. При этом усилия на датчиках уменьшаются. Система приходит в равновесное состояние при равенстве этих усилий заданному значению, определяемому настройкой пружины 45. Таким образом, кинематическое соответствие режимов работы трактора, приводимых ступенчатой трансмиссией, и колес 11 технологических тележек, приводимых гидропередачами, обеспечивается бесступен чатым регулированием частоты вращения тяговых гидромоторов из условия поддержания постоянного заданного тягового усилия, развиваемого трактором. Двухпозиционный распределитель 47 обеспечивает два тяговых режима трактора: на гоне с номинальным тяговым режимом (полость 44 соединена с нагнетательной гидролинией 21 насоса подпитки) и на разворотной полосе при движении агрегата с поднятыми орудиями без тяговой нагрузки (полость 44 соединена со сливной гидролинией). В последнем случае давление в полостях 34 датчиков определяется только усилием возвратных пружин 32, поскольку усилия на датчиках равны нулю (тяговое усилие через навесное устройство 8 трактора не передается). При поворотах или развороте агрегата в ре зультате поворота направляющих колес 41 возникают разницы в коэффициенте расхода управляемых дросселей 39, в одном из них он увеличивается, а в другом уменьшается. При этом равновесие плунжеров;, 42 и 43 нарушается, сжатие одной из пружины 45 уменьшается, а другой - увеличивается, Соответственно происходит изменение рабочих объемов и производительности насосов 14. Один из них уменьшает свою производительность, обеспечивая снижение окружной скорости ведущих колес отстающей при повороте технологической тележки, а другой увеличивает производительность, повышая окружную скорость ведущих колес забегающей при повороте технологической тележки. Однако при этом не обеспечивается точное кинематическое соответствие разницы окружных скоростей отстающей и забегающей технологических тележек из-за нестабильности характеристик дросселей 39. При кинематически не согласованном повороте трех шарнирно-сочлененных частей агрегата (трактора и технологических тележек) происходит перераспределение составляющих тягового усилия трактора. Процесс изменения рабочих объемов насосов 14 будет закончен и равновесие плунжеров 42 и 43 востановлено только тогда, когда будет достигнуто равенство усилий на датчиках заданному значению. При этом обеспечивается кинематическое соответствие угла поворота направляющих колес разнице окружных скоростей ведущих колес отстающей и забегающей технологических тележек. Отклонею е давления в рабочей полости датчика от заданного уровня при перемещении упора 5 и изменения ширины кольцевой дросселирующей, щели 54 определяется, как сумма двух слагаемых. Первое из них пропорционально изменению ширины щели (следовательно перемещению упора 5), второе - изменению расхода рабочей жидкости через щель 54 (следовательно скорости перемещения упора 5). Поскольку перемещения упоров пропорциональны угловому отклонению соединительных тяг относительно продольной оси трактора, давление в рабочей полости 34 датчика 6 равно сумме двух слагаемых, пропорциональных углу и скорости углового отклонения соответствующей соединительной тяги относительно продольной оси трактора. Поскольку отклонения давления на входах 36 чувствительных элементов равно сумме отклонений давления в рабочей полости 34 датчика 6 Jf перепада давления на дросселе 39, суммарные управляющие сигналы, подаваемые на входы исполнительных механизмов управления гидроприводами, равны сумме трех слагаемых, пропорциональных углу поворота направляю1цих колес, угловому отклонению и скорости углового отклонения соединительных тяг относительно продольной оси трактора. Поскольку сигналы, йропорциональные углу поворота направляющих колес трактора, и скорости углового отклонения соединительной тяги относительно продольной оси трактора имеют фазовое опережение до 90° сигнала, пропорционального отклонению соединительных тяг относительно трактора, предлагаемая система управления повышает точность движения агрегата при возделывании и посеве пропашных культур по сравнению с известными устройствами. Для перестроения агрегата из рабочего положения в транспортное соединитепьш 1е тяги 2 разворачиваются относительно вертикальных |. шарниров 4 на 90 Для этого при заторможенном тракторе тяга 51 ручного управления выводится из нулевого положения, а золотниковый распределитель 18 включается в положение заднего хода тяговых гидромоторов. В этом случае механическая связь соединительных тяг 2 и упоров 5 датчиков размыкается. Давление на входах 36 чувствительных элементов одинаково и минимально, пружина 45 расжата, плунжеры 42 и 43 находятся в крайних положениях. При движении тяги 50 ру 1ного управления влево происходит синхрон ный на одинаковый угол разворот рычажных опор 49 и рычагов 48. Устанавливается одина ковая частота вращения тяговых гидромоторов, которые обеспечивают разворот соединительных тяг 2 в транспортное положение (не показано). При обратном перестроении (из транспортного в рабочее) золотниковый распределитель 18 включается в положение переднего хода. Время перестроения соединительных тяг и технологических тележек зависит от положеикя тяги 50 ручного управления. Предлагаемое устройство управления пред1Назначено для применения в сельскохозяйстве ном агрегате, состоящим из трактора и двух технологических тележек с гидроприводными колесами, агрегатйруемых- с навесными широкозахватными орудиями. Ф о р м ула изобретения 1. Устройство управления гидропередачами технологнческих тележек транспортного средства, щарнирно соединенных с Ш1М и приводимых в действие посредством тяговых гидромоторов, питаемых от регулируемых гидронасосов, содержащее датчики усилий с рабочими полостями и чувствительные элементы, кинематически связанные посредством рычагов и тяг с гидравлическими исполнительными механизмами управления упомянутых гидронасосов, гидравлически соединенных посредством гидролиний с источниками питания и гидробаком, отличающееся тем, что, с делью улучщения управляемости путем повыщения точности управления поворотом транспортного средства, устройство снабжено устаиовленнымн в гидролиниях, соединяющих датчики усилий с гидробаком, двумя регулируемыми дросселями с общим органом управления, кинематически связанным с; механизмом управления транспортного средства, причем рабочие полости датчиков усилий соединены с источниками питания и входами чувствительных элементов, каждый из которых выполнен в виде двух соосно расположенных и подпружиненных плунжеров разного диаметра, при этом входы чувствительных элементов образованы полсютями, ограниченными корпусом и торцовой поверхностью плунжеров больщего диаметра, а полости, ограниченные , корпусом и торцовыми поверхностями плунжеров меньщего диаметра, соединены с источником питания и гидробаком. 2. Устройство по п. 1, о т л и ч а ю щ ее с я тем,что оно снабжено тягой ручного управления, кинематнчески связанной с упомянутыми рычагами. Источники информации, принятые во внимание при экспертизе 1. Патент Англии N 1260438, кл. В 62 К 59/02, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод технологических тележек транспортного средства,кинематически связанных с трактором | 1978 |
|
SU920273A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Транспортное средство сельскохозяйственного назначения | 1974 |
|
SU523654A1 |
| Объемная гидравлическая трансмиссия самоходной машины | 1982 |
|
SU1031806A1 |
| Транспортное средство сельскохозяйственного назначения | 1978 |
|
SU715042A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ВИБРАЦИОННЫХ РАБОЧИХ ОРГАНОВ ПОЧВООБРАБАТЫВАЮЩИХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2231241C2 |
| Гидростатическая передача машины | 1976 |
|
SU613156A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1994 |
|
RU2091999C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЯГИ МЕХАНИЗМА НАВЕСКИ ТРАКТОРА | 1991 |
|
RU2033009C1 |
| Гидрообъемная трансмиссия автогрейдера | 1987 |
|
SU1466964A1 |


К pill
ву/
X
PHI ti
,
СI in I
. ii/iii) .
