Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству для испытания динамической нагрузки.
Уровень техники
[0002] Устройство для испытания динамической нагрузки используется, чтобы оценивать прочности изделий и достаточности конструкций упаковки. Устройство для испытания динамической нагрузки, раскрытое в японской патентной предварительной публикации № 2019-35705, снабжается опорной пластиной 36 (фиг. 5), которая поддерживает испытываемое изделие для того, чтобы предохранять испытываемое изделие от опрокидывания во время испытания. Опорная пластина устанавливается на подвижное устройство (столик динамической нагрузки), на котором испытываемое изделие размещается перпендикулярно направлению движения подвижного устройства.
Сущность изобретения
[0003] В устройстве для испытания динамической нагрузки, описанном в предварительной публикации Японского патента No. 2019-35705, поскольку опорная пластина устанавливается на столик динамической нагрузки, вес столика динамической нагрузки увеличивается посредством веса опорной пластины. Кроме того, поскольку опорная пластина, имеющая большую площадь поверхности, размещается перпендикулярно направлению движения столика динамической нагрузки, большое давление ветра действует на опорную пластину, когда столик динамической нагрузки движется с высокой скоростью. Увеличение в весе столика динамической нагрузки вследствие установки опорной пластины и увеличение в давлении ветра, которое столик динамической нагрузки получает во время движения (другими словами, увеличение в сопротивлении воздуха), вызывают увеличение мощности, требуемой для привода столика динамической нагрузки, приводя в результате к увеличению в потреблении мощности. Кроме того, вследствие увеличения в мощности, требуемой для привода столика динамической нагрузки, больший мотор (т.е., более мощный мотор) может требоваться для привода столика динамической нагрузки и может приводить в результате к проблемам увеличения в первоначальной стоимости и увеличения в размере испытательного устройства.
[0004] Настоящее изобретение было выполнено с учетом вышеописанных обстоятельств, и целью настоящего изобретения является снижение увеличения в мощности, требуемой для привода столика динамической нагрузки вследствие введения средства для предохранения испытываемого изделия от опрокидывания.
[0005] Согласно аспекту настоящего изобретения, предоставляется устройство для испытания динамической нагрузки, включающее в себя тележку, приспособленную для движения с испытываемым образцом, помещенным на нее, и средство предотвращения опрокидывания, сконфигурированное, чтобы предохранять испытываемый образец от опрокидывания. Средство предотвращения опрокидывания включает в себя первое средство, независимое от тележки. Первое средство предусматривается таким образом, чтобы быть подвижным в направлении движения тележки.
[0006] В вышеописанном устройстве для испытания динамической нагрузки первое средство может включать в себя опорную основную часть, сконфигурированную, чтобы поддерживать испытываемый образец, когда испытываемый образец наклоняется, чтобы предохранять испытываемый образец от опрокидывания; и направляющее средство, сконфигурированное, чтобы направлять движение опорной основной части в направлении движения.
[0007] Вышеописанное устройство для испытания динамической нагрузки может включать в себя основание, на которое устанавливается первое средство, и первое средство может включать в себя крепежное средство, сконфигурированное, чтобы разъемным образом прикреплять опорную основную часть к основанию.
[0008] В вышеописанном устройстве для испытания динамической нагрузки первое средство может включать в себя крепежное и направляющее средство, служащее в качестве направляющего средства и крепежного средства. Крепежное и направляющее средство может включать в себя T-образную канавку, прикрепленную к основанию и протягивающуюся в направлении движения, гайку T-образной канавки, вставленную в T-образную канавку, и болт, который вставляется в сквозное отверстие, сформированное в опорной основной части, и помещается в гайку T-образной канавки, тем самым, прикрепляя опорную основную часть к T-образной канавке.
[0009] В вышеописанном устройстве для испытания динамической нагрузки первое средство может включать в себя средство привода опорной основной части, сконфигурированное, чтобы приводить в движение опорную основную часть в направлении движения.
[0010] В вышеописанном устройстве для испытания динамической нагрузки средство привода опорной основной части может включать в себя приводной модуль, сконфигурированный, чтобы создавать мощность для привода опорной основной части, и ременной механизм, сконфигурированный, чтобы передавать мощность, создаваемую приводным модулем, опорной основной части.
[0011] Вышеописанное устройство для испытания динамической нагрузки может включать в себя устройство привода тележки, сконфигурированное, чтобы приводить в движение тележку, и управляющее устройство, сконфигурированное, чтобы управлять средством привода опорной основной части и устройством привода тележки. Управляющее устройство может перемещать опорную основную часть в предварительно определенную позицию, заданную в соответствии с условием испытания.
[0012] Вышеописанное устройство для испытания динамической нагрузки может включать в себя устройство создания динамической нагрузки, сконфигурированное, чтобы создавать динамическую нагрузку, которая должна быть приложена к испытываемому образцу посредством столкновения с тележкой, и устройство для испытания динамической нагрузки может быть приспособлено для выполнения испытания сталкивающегося типа, в котором динамическая нагрузка прикладывается к испытываемому образцу посредством побуждения столкновения тележки, на которой испытываемый образец размещается, с устройством создания динамической нагрузки, и испытания несталкивающегося типа, в котором динамическая нагрузка прикладывается к испытываемому образцу посредством передачи динамической нагрузки, сформированной посредством привода устройства привода тележки, к тележке. Управляющее устройство может управлять устройством привода тележки, чтобы побудить тележку сталкиваться с устройством создания динамической нагрузки с предварительно определенной скоростью в испытании сталкивающегося типа, и может управлять устройством привода тележки таким образом, что тележка приводится в движение на основе предварительно заданного сигнала динамической нагрузки в испытании несталкивающегося типа.
[0013] В вышеописанном устройстве для испытания динамической нагрузки устройство привода тележки может включать в себя каретку, съемным образом присоединенную к тележке, и трековое устройство тележки, сконфигурированное, чтобы поддерживать с возможностью движения тележку и каретку. В испытании сталкивающегося типа каретка присоединена к тележке, а в испытании несталкивающегося типа соединение между кареткой и тележкой разъединяется.
[0014] В вышеописанном устройстве для испытания динамической нагрузки устройство создания динамической нагрузки может включать в себя подвижный блок, первый пластиковый программатор, присоединенный к поверхности подвижного блока, обращенной к тележке, трековое устройство блока, сконфигурированное, чтобы поддерживать подвижный блок таким образом, чтобы быть подвижным в направлении движения, и амортизатор удара, сконфигурированный, чтобы гасить колебание (вибрацию) подвижного блока. Трековое устройство блока может включать в себя линейную направляющую. Линейная направляющая может включать в себя рельс и бегунок, присоединенный к подвижному блоку и приспособленный для движения по рельсу посредством роликовых элементов. Тележка может включать в себя второй пластиковый программатор, присоединенный к поверхности, обращенной к подвижному блоку.
[0015] В вышеописанном устройстве для испытания удара средство предотвращения опрокидывания может включать в себя второе средство, установленное на тележке. Второе средство может включать в себя множество столбчатых опор, поднимающихся на тележке, и линейный элемент, растянутый поверх множества столбчатых опор.
[0016] Согласно другому аспекту настоящего изобретения, предоставляется устройство для испытания динамической нагрузки, включающее в себя тележку, приспособленную для движения с испытываемым образцом, помещенным на нее, и средство предотвращения опрокидывания, сконфигурированное, чтобы предохранять испытываемый образец от опрокидывания. Средство предотвращения опрокидывания включает в себя второе средство, установленное на тележке. Второе средство включает в себя множество столбчатых опор, поднимающихся на тележке, и линейный элемент, растянутый поверх множества столбчатых опор.
[0017] В вышеописанном устройстве для испытания динамической нагрузки линейный элемент может включать в себя один из струнного элемента, имеющего форму струны, и сетчатого элемента, имеющего форму сетки.
[0018] Согласно варианту осуществления настоящего изобретения, возможно снижать увеличение в мощности, требуемой для привода столика динамической нагрузки, вследствие введения средства для предохранения испытываемого изделия от опрокидывания.
Краткое описание чертежей
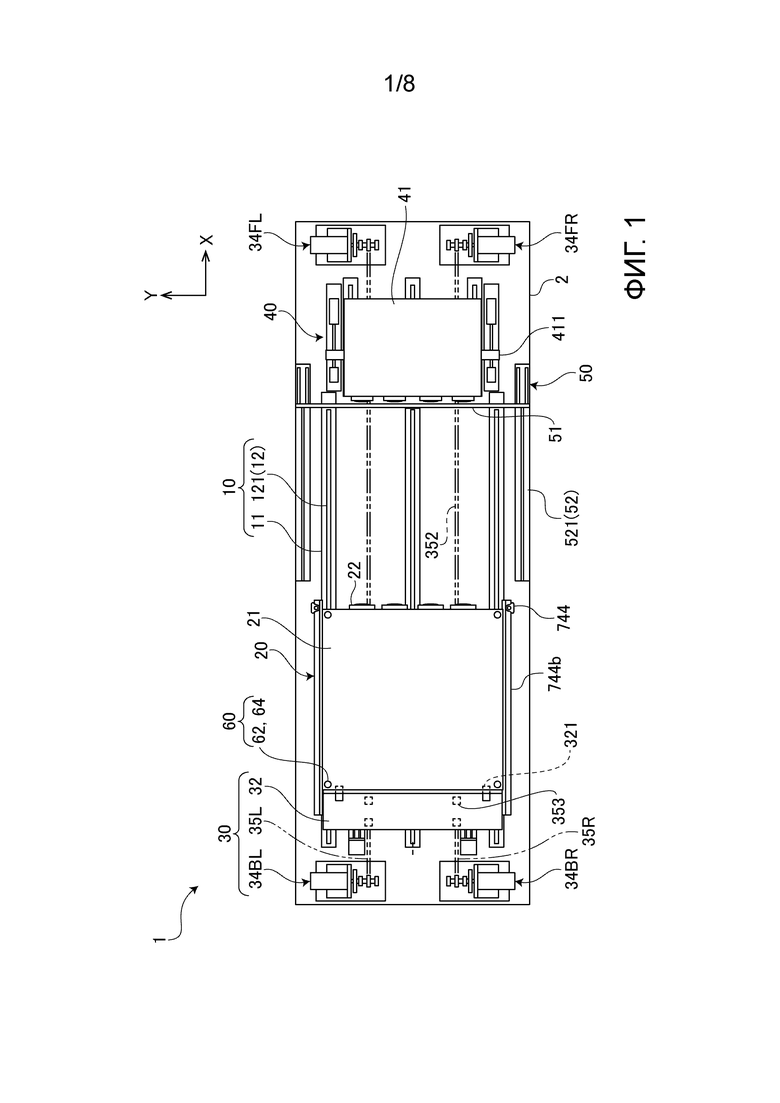
[0019] Фиг. 1 является видом в плане устройства для испытания динамической нагрузки согласно первому варианту осуществления настоящего изобретения.
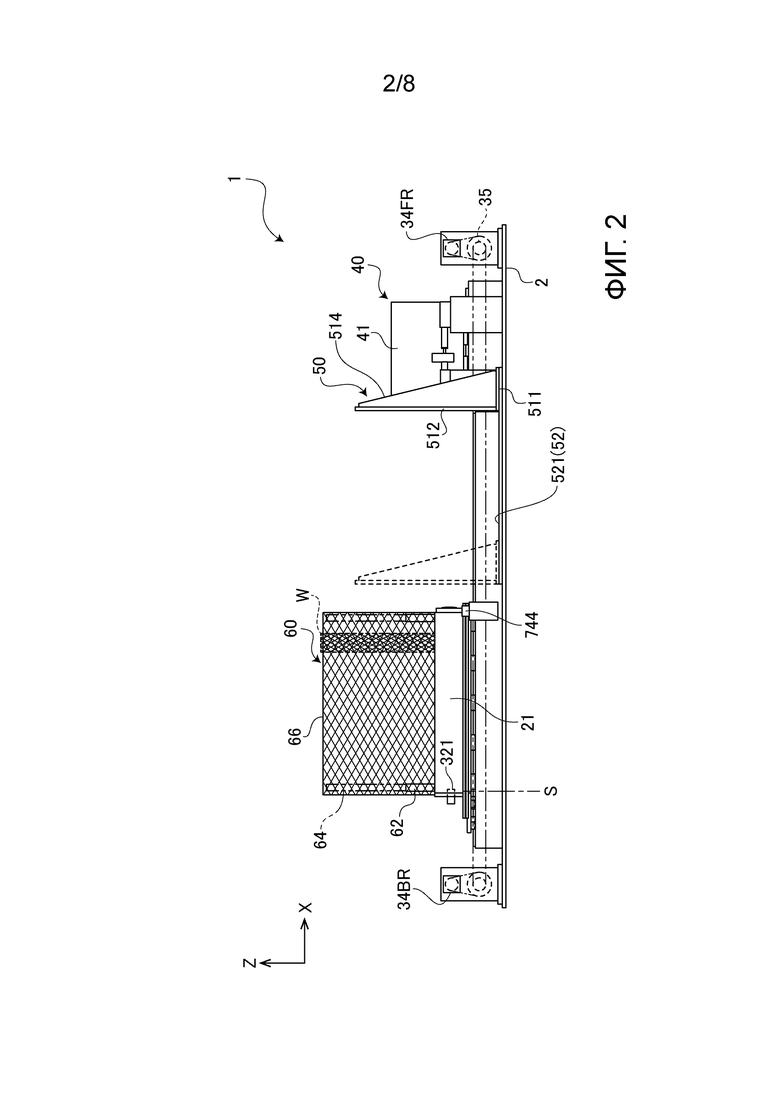
Фиг. 2 является видом сбоку устройства для испытания динамической нагрузки согласно первому варианту осуществления настоящего изобретения.
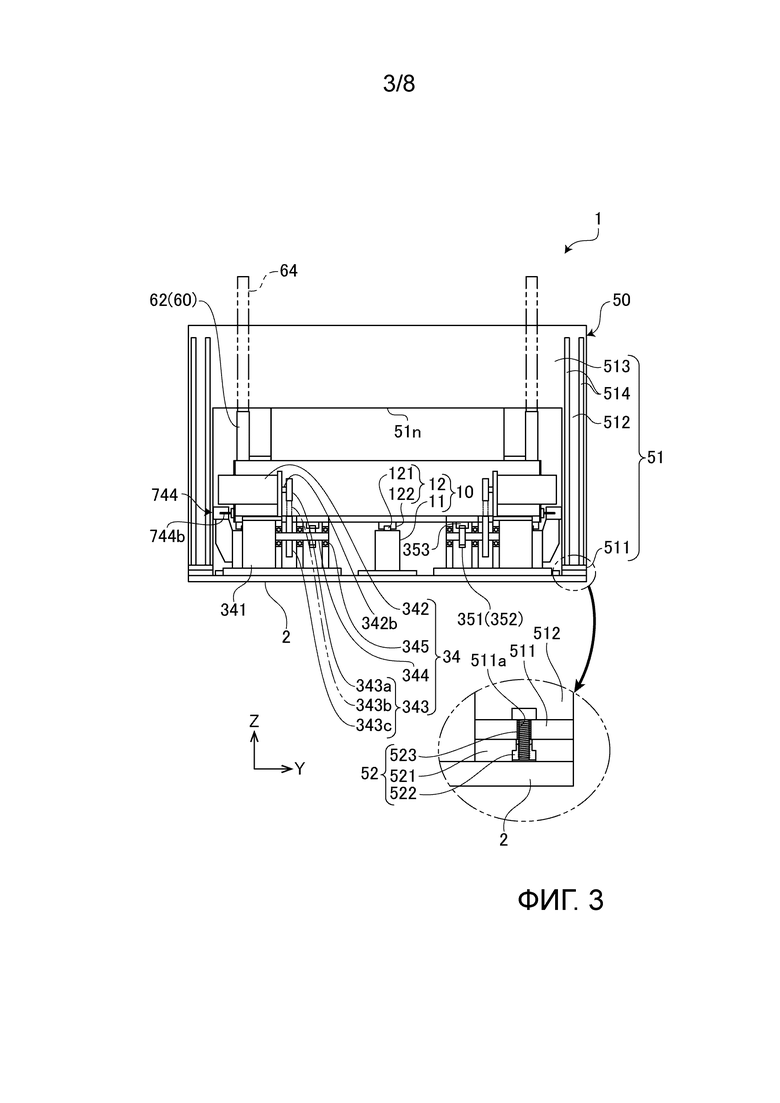
Фиг. 3 является видом спереди устройства для испытания динамической нагрузки согласно первому варианту осуществления настоящего изобретения.
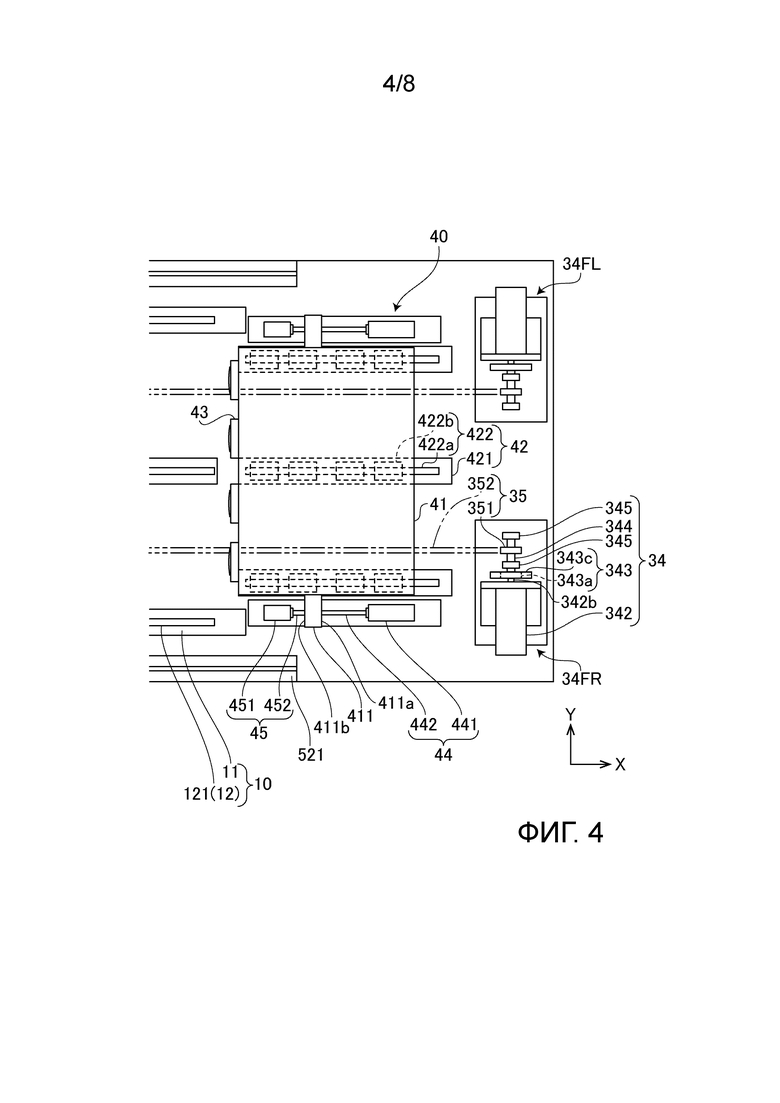
Фиг. 4 является укрупненным видом в плане около устройства создания динамической нагрузки первого варианта осуществления.
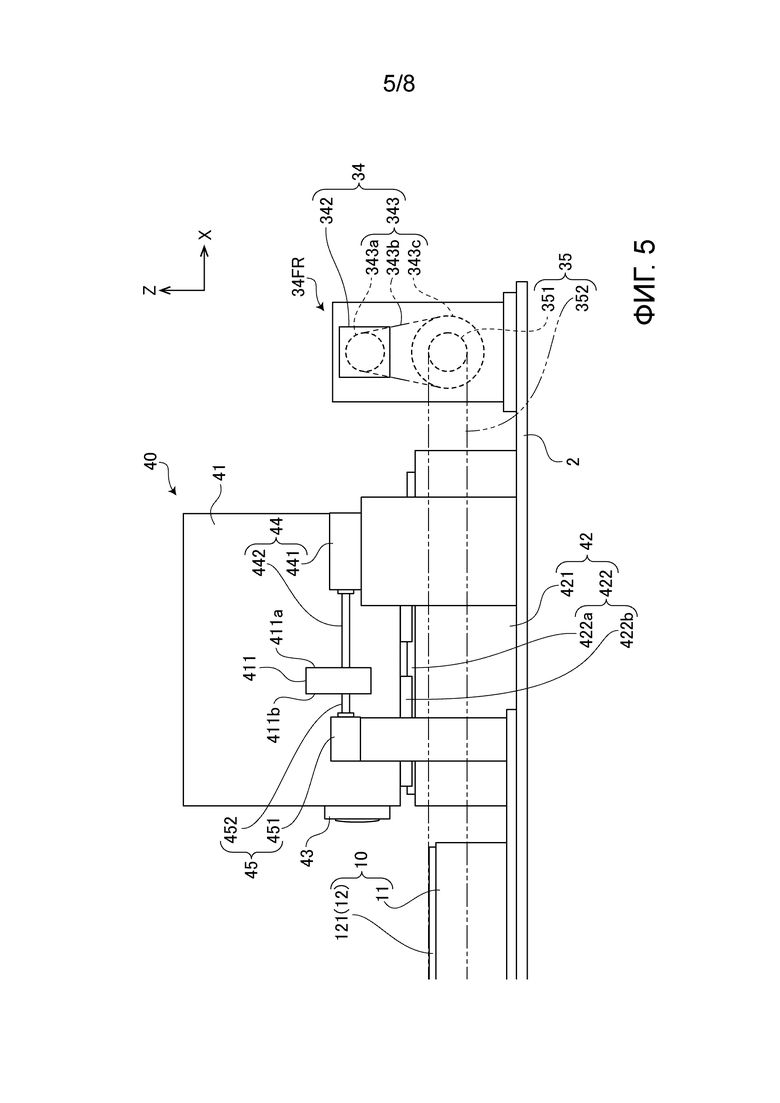
Фиг. 5 является укрупненным видом сбоку около устройства создания динамической нагрузки первого варианта осуществления.
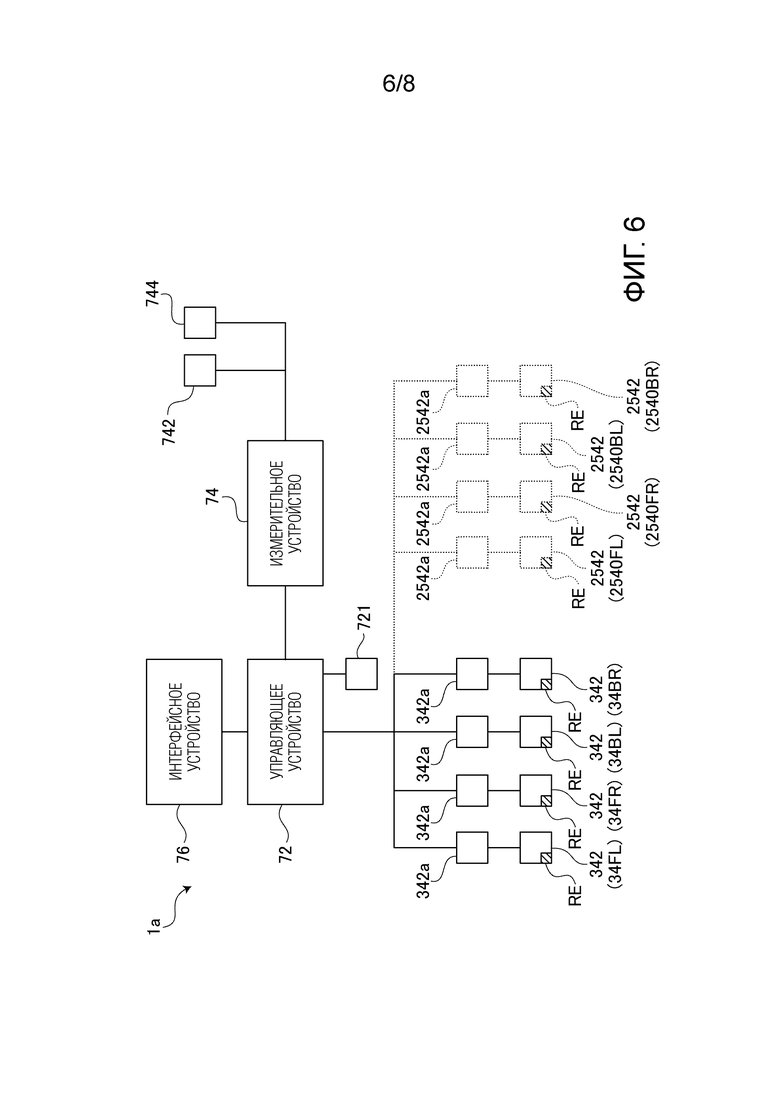
Фиг. 6 является блок-схемой, показывающей схематичную конфигурацию системы управления устройства для испытания динамической нагрузки согласно вариантам осуществления настоящего изобретения.
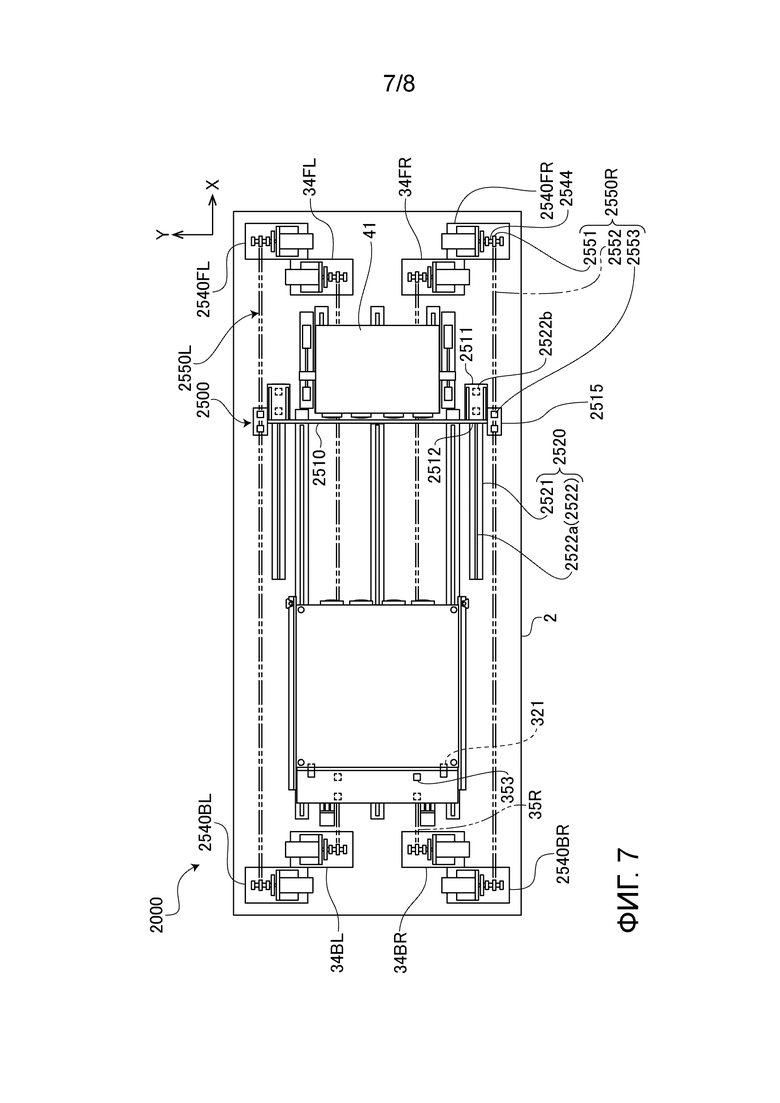
Фиг. 7 является видом в плане устройства для испытания динамической нагрузки согласно второму варианту осуществления настоящего изобретения.
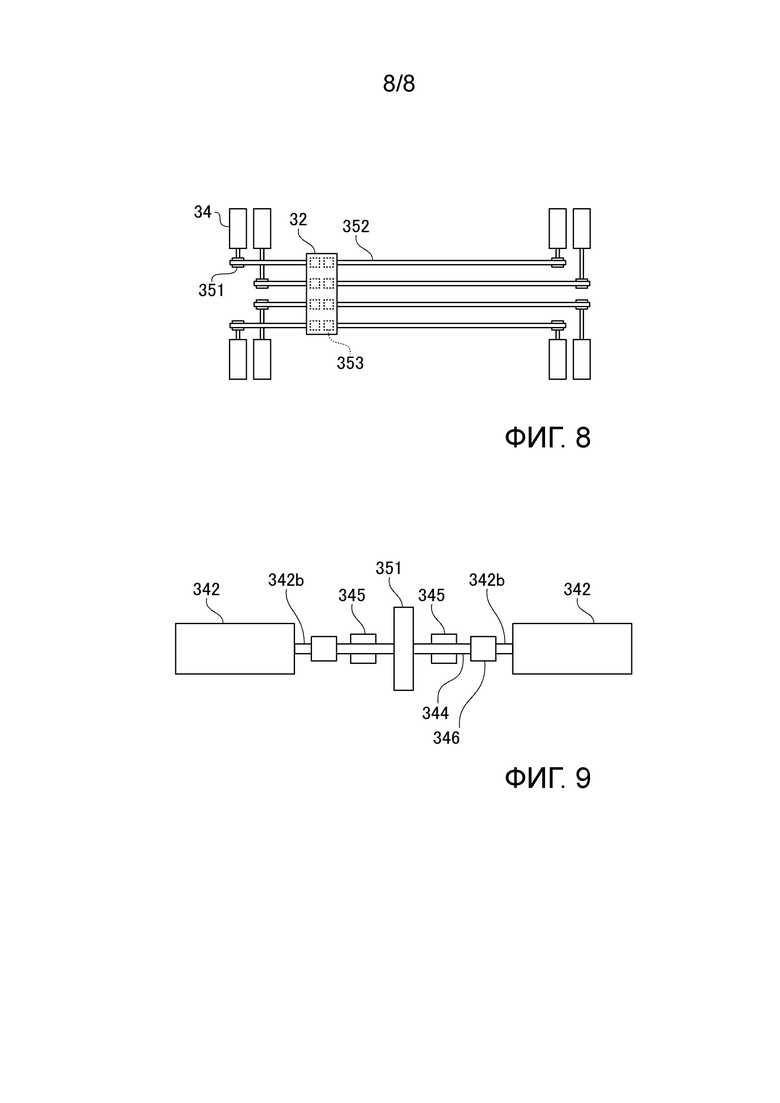
Фиг. 8 является схемой, показывающей схематичную конфигурацию модифицированного примера устройства привода тележки.
Фиг. 9 является схемой, показывающей схематичную конфигурацию модифицированного примера приводного модуля.
Варианты осуществления для выполнения изобретения
[0020] Далее в данном документе, варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи. В последующем описании одинаковые или соответствующие номера назначаются одинаковым или соответствующим компонентам, и дублирующие описания в данном документе пропускаются. На каждом чертеже, в случае, когда множество элементов, номера которых являются общими, показаны, число необязательно назначается всем из множества элементов, и назначение номера некоторым из множества элементов соответственно пропускается. Кроме того, на каждом чертеже, некоторые компоненты пропускаются или показаны в поперечных сечениях для удобства объяснения.
[0021] (Первый вариант осуществления)
Фиг. 1-3 являются видом в плане, видом сбоку и видом спереди, в таком порядке, устройства 1 для испытания динамической нагрузки согласно первому варианту осуществления настоящего изобретения, а фиг. 4 и фиг. 5 являются укрупненным видом в плане и укрупненным видом сбоку, в таком порядке, около позже описываемого устройства 40 создания динамической нагрузки устройства 1 для испытания динамической нагрузки.
[0022] В последующем описании направление слева направо на фиг. 1 определяется как направление X-оси, направление снизу вверх на фиг. 1 определяется как направление Y-оси, а направление, перпендикулярное документу с тыльной стороны в переднюю сторону определяется как направление Z-оси. Направление X-оси и направление Y-оси являются горизонтальными направлениями, ортогональными друг другу, а направление Z-оси является вертикальным направлением. Кроме того, положительное направление X-оси называется передним, отрицательное направление X-оси называется задним, положительное направление Y-оси называется левым, а отрицательное направление Y-оси называется правым.
[0023] Устройство 1 для испытания динамической нагрузки согласно первому варианту осуществления настоящего изобретения, которое будет описано ниже, конфигурируется, чтобы иметь возможность выполнять два типа способов испытания: традиционный способ испытания (далее в данном документе называемый "испытанием сталкивающегося типа"), в котором динамическая нагрузка прикладывается к испытываемому образцу W посредством побуждения столкновения столика динамической нагрузки, на котором испытываемый образец W размещается, с устройством формирования сигнала динамической нагрузки, и новый способ испытания (далее в данном документе называемый "испытанием несталкивающегося типа"), в котором динамическая нагрузка прикладывается к испытываемому образцу W посредством передачи, столику динамической нагрузки, динамической нагрузки, созданной посредством привода мотора на основе сигнала динамической нагрузки.
[0024] Устройство 1 для испытания динамической нагрузки включает в себя тележку 20 (столик динамической нагрузки), на котором размещается испытываемый образец W, устройство 30 привода тележки, которое приводит в движение тележку 20, трековое устройство 10 (трековое устройство тележки), которое поддерживает тележку 20 и позже описываемую каретку 32 устройства 30 привода тележки таким образом, чтобы иметь возможность движения в направлении X-оси, устройство 40 создания динамической нагрузки (устройство формирования сигнала динамической нагрузки), которое создает динамическую нагрузку, которая должна быть приложена к испытываемому образцу W посредством столкновения с тележкой 20 в испытании сталкивающегося типа, и средство предотвращения опрокидывания, которое предохраняет испытываемый образец W от опрокидывания.
[0025] Трековое устройство 10 включает в себя дорожное полотно 11, установленное на основание 2 и протягивающееся в направлении X-оси, и циркуляционную линейную опору качения (далее в данном документе называемую "линейной направляющей") 12, установленную на дорожном полотне 11. Трековое устройство 10 настоящего варианта осуществления включает в себя множество комплектов (например, три комплекта) дорожного полотна 11 и линейной направляющей 12, размещенных, например, с равными интервалами в поперечном направлении (т.е., в направлении Y-оси). Следует отметить, что множество дорожных полотен 11 могут быть соединены как единое целое. Например, трековое устройство 10 может иметь конфигурацию, в которой множество линейных направляющих 12 устанавливаются на едином дорожном полотне 11.
[0026] Каждая линейная направляющая 12 включает в себя рельс 121, уложенный на верхнюю поверхность дорожного полотна 11 (т.е., прикрепленный к основанию 2), и множество (например, семь) бегунков 122 (фиг. 3), приспособленных для движения по рельсу 121 посредством множества роликовых элементов. Роликовые элементы удерживаются в бегунках 122 и на пути циркуляции, сформированном между рельсом 121 и бегунками 122. Некоторые из множества бегунков 122 (например, пять бегунков 122) каждой линейной направляющей 12 размещаются, например, с равными интервалами в направлении X-оси и присоединяются к нижней поверхности тележки 20. Остальные бегунки 122 (например, два бегунка 122) каждой линейной направляющей 12 размещаются, например, с равными интервалами в направлении X-оси и присоединяются к нижней поверхности позже описанной каретки 32 устройства 30 привода тележки. Линейная направляющая 12 направляет перемещения тележки 20 и каретки 32 в направлении X-оси. Каретка 32, тележка 20 и устройство 40 создания динамической нагрузки размещаются в таком порядке в направлении X-оси.
[0027] Устройство 30 привода тележки включает в себя каретку 32, которая приспособлена для движения по трековому устройству 10, и средство привода каретки, которое приводит в движение каретку 32. Средство привода каретки включает в себя приводной модуль 34, который создает мощность для привода каретки 32, и ременной механизм 35, который передает мощность, создаваемую приводным модулем 34, каретки 32.
[0028] Устройство 30 привода тележки настоящего варианта осуществления включает в себя четыре приводных модуля 34 (34FL, 34BL, 34FR и 34BR), размещенных рядом с четырьмя углами основания 2, соответственно, и два комплекта ременных механизмов 35 (35L и 35R) слева и справа, соответственно. Ременной механизм 35L слева приводится в действие парой приводных модулей 34FL и 34BL слева, а ременной механизм 35R справа приводится в действие парой приводных модулей 34FR и 34BR справа.
[0029] Как показано на фиг. 3, приводной модуль 34 включает в себя раму 341, сервомотор 342, ременной механизм 343, вал 344 и множество подшипников 345. Сервомотор 342 присоединяется к верхнему фрагменту рамы 341, при этом его вал 342b ориентирован в направлении Y-оси. Вал 344 размещается ниже и параллельно валу 342b сервомотора 342 и поддерживается с возможностью вращения множеством подшипников 345, присоединенных к раме 341.
[0030] Ременной механизм 343 включает в себя ведущий шкив 343a, присоединенный к валу 342b сервомотора 342, ведомый шкив 343c, присоединенный к валу 344, и зубчатый ремень 343b, обмотанный вокруг ведущего шкива 343a и ведомого шкива 343c. Каждый из ведущего шкива 343a и ведомого шкива 343c является зубчатым шкивом, имеющим зубцы, приспособленные для зубчатого ремня 343b. В настоящем варианте осуществления, поскольку число зубцов (т.е., начальный диаметр) ведомого шкива 343c больше числа зубцов ведущего шкива 343a, ременной механизм 343 функционирует как редуктор скорости и, таким образом, передает крутящий момент, выводимый из сервомотора 342, валу 344, в то же время усиливая крутящий момент.
[0031] Ременной механизм 35 включает в себя пару ведущих шкивов 351, зубчатый ремень 352, намотанный вокруг пары ведущих шкивов 351, и зажим 353 для ремня (крепежное инструментальное средство промежуточного узла намотки) для прикрепления зубчатого ремня 352 к каретки 32. Ведущие шкивы 351 присоединяются к валам 344 приводных модулей 34, соответственно.
[0032] Зубчатый ремень 352 и зубчатый ремень 343b имеют сердцевины из стальной проволоки. Следует отметить, что зубчатые ремни, которые имеют сердцевины из так называемых суперволокон, таких как углеродные волокна, арамидные волокна и полиэтиленовые волокна сверхвысокой молекулярной массы, могут быть использованы в качестве зубчатого ремня 352 и зубчатого ремня 343b. С помощью легковесной и высокопрочной сердцевины, такой как углеродная сердцевина, каретка 32 и тележка 20 могут приводиться в движение с большим ускорением, даже когда сервомотор 342, имеющий относительно низкую выходную мощность, используется, и, таким образом, устройство 1 для испытания динамической нагрузки может быть уменьшено в размере. Кроме того, в случае использования сервомотора 342, имеющего такую же выходную мощность, с помощью легковесных зубчатых ремней 352 и 343b, имеющих сердцевины, сформированные из так называемого суперволокна, возможно прикладывать динамическую нагрузку большего ускорения к испытываемому образцу W.
[0033] Пара ведущих шкивов 351 ременного механизма 35L на левой стороне присоединяются к валам 344 пары приводных модулей 34FL и 34BL на левой стороне, соответственно, и пара ведущих шкивов 351 ременного механизма 35R на правой стороне присоединяются к валам 344 пары приводных модулей 34FR и 34BR на правой стороне, соответственно.
[0034] Каретка 32 разъемным образом присоединяется к заднему концевому фрагменту тележки 20 соединительным средством 321 (например, болтами, электромагнитами или т.п.). В частности, каретка 32 присоединяется как единое целое к тележке 20, когда выполняется испытание несталкивающегося типа, и отделяется от тележки 20, когда выполняется испытание сталкивающегося типа.
[0035] Тележка 20 включает в себя столик 21 и пластиковый программатор (далее в данном документе называемый "подушкой") 22, который является первым средством регулирования динамической нагрузки, присоединенным к передней поверхности столика 21. Тележка 20 настоящего варианта осуществления включает в себя четыре подушки 22, размещенных с равными интервалами в направлении Y-оси.
[0036] Как показано на фиг. 4, устройство 40 создания динамической нагрузки включает в себя подвижный блок 41, трековое устройство 42 (трековые устройства блока), которое поддерживает подвижный блок 41 таким образом, чтобы быть подвижным в направлении X-оси, подушки 43, присоединенные к тыльной поверхности (поверхности, обращенной к тележке 20) подвижного блока 41, и две пары амортизаторов 44 и 45 удара, размещенных на левой и правой сторонах подвижного блока 41. Амортизаторы 44 и 45 удара являются, например, гидравлическими амортизаторами удара.
[0037] Трековое устройство 42 включает в себя дорожное полотно 421, установленное на основание 2 и протягивающееся в направлении X-оси, и линейную направляющую 422, установленную на дорожное полотно 421. Трековое устройство 42 настоящего варианта осуществления включает в себя множество комплектов (например, три комплекта) из дорожного полотна 421 и линейной направляющей 422, размещенных с равными интервалами в поперечном направлении. Следует отметить, что множество дорожных полотен 421 могут быть соединены как единое целое. Например, трековое устройство 42 может иметь конфигурацию, в которой множество линейных направляющих 422 устанавливаются на едином дорожном полотне 421.
[0038] Каждая линейная направляющая 422 включает в себя рельс 422a, уложенный на верхней поверхности дорожного полотна 421, и множество (например, четыре) бегунков 422b, приспособленных для движения по рельсу 422a. Множество бегунков 422b, например, размещаются с равными интервалами в направлении X-оси и присоединяются к нижней поверхности подвижного блока 41. Линейная направляющая 422 направляет движение подвижного блока 41 в направлении X-оси.
[0039] Как показано на фиг. 1 и 3, пара датчиков 744 линейного перемещения предусматриваются на левой и правой сторонах тележки 20 в центральном фрагменте подвижного диапазона тележки 20. Основные части датчиков 744 линейного перемещения присоединяются к дорожному полотну 11. Шкалы 744b датчиков 744 линейного перемещения присоединяются к левой и правой сторонам тележки 20. Позиция и скорость тележки 20 обнаруживаются посредством датчиков 744 линейного перемещения.
[0040] Устройство 40 создания динамической нагрузки включает в себя столько же подушек 43, сколько подушек 22 тележки 20, подушки 43 являются вторым средством регулирования динамической нагрузки. Подушки 43 спариваются с подушками 22 и присоединяются к тыльной части подвижного блока 41 в позициях, обращенных к соответствующим подушкам 22.
[0041] Как показано на фиг. 4, пара нажимных пластин 411, имеющих две плоские поверхности (рабочие поверхности 411a и 411b), перпендикулярные X-оси, выступают из левой и правой боковых поверхностей подвижного блока 41. Амортизатор 44 удара размещается рядом с передней поверхностью нажимной пластины 411 со штоком 442 поршня, ориентированным по направлению к нажимной пластине 411. Амортизатор 45 удара размещается рядом с тыльной поверхностью нажимной пластины 411 со штоком 452 поршня, ориентированным по направлению к нажимной пластине 411. Цилиндр 441 амортизатора 44 удара и цилиндр 451 амортизатора 45 удара прикрепляются к основанию 2. Дальний конец штока 442 поршня упирается в рабочую поверхность 411a, сформированную на передней поверхности нажимной пластины 411, а дальний конец штока 452 поршня упирается в рабочую поверхность 411b, сформированную на тыльной поверхности нажимной пластины 411.
[0042] Перемещение подвижного блока 41 в положительном направлении X-оси демпфируется, главным образом, амортизатором 44 удара, а перемещение подвижного блока 41 в отрицательном направлении X-оси демпфируется, главным образом, амортизатором 45 удара. С помощью пары амортизаторов 44 и 45 удара, размещенных в противоположных направлениях, возможно более эффективно гасить динамическую нагрузку (колебание (вибрацию)) подвижного блока 41.
[0043] В настоящем варианте осуществления гидравлические амортизаторы удара используются в качестве амортизаторов 44 и 45 удара. Однако, пневматические амортизаторы удара могут быть использованы вместо гидравлических амортизаторов удара. Альтернативно, гидравлический амортизатор удара и пневматический амортизатор удара (или упругий элемент, такой как пневмопружина или винтовая пружина) могут быть использованы посредством соединениях их последовательно или параллельно. Например, как в подвеске МакФерсона автомобиля, может быть применена конфигурация, в которой амортизатор удара и винтовая пружина размещены соосно (т.е., амортизатор удара проходит через полый фрагмент винтовой пружины), чтобы соединять амортизатор удара и винтовую пружину параллельно.
[0044] В испытании сталкивающегося типа динамическая нагрузка прикладывается к тележке 20 и испытываемому образцу W, вынуждая тележку 20, которая движется по инерции, сталкиваться с устройством 40 создания динамической нагрузки. В это время, столик 21 тележки 20 и подвижный блок 41 устройства 40 создания динамической нагрузки сталкиваются друг с другом через подушки 22 и 43. Кроме того, колебание (динамическая нагрузка) подвижного блока 41, созданное посредством столкновения, амортизируется и ослабляется амортизаторами 44 и 45 удара. Следовательно, колебательный сигнал динамической нагрузки, который устройство 40 создания динамической нагрузки прикладывает к испытываемому образцу W, изменяется в зависимости от характеристик амортизаторов 44 и 45 удара (первое средство амортизации удара) и подушек 22 и 43 (второе средство амортизации удара). Характеристики амортизаторов 44 и 45 удара (первого средства амортизации удара) и подушек 22 и 43 (второго средства амортизации удара) регулируются таким образом, что динамическая нагрузка, имеющая желаемую форму колебательного сигнала, может быть приложена к испытываемому образцу W.
[0045] Средство предотвращения опрокидывания настоящего варианта осуществления включает в себя первую опору 50 (первое средство), установленную на основании 2 независимо от тележки 20, и вторую опору 60 (второе средство), установленную на тележке 20.
[0046] Первая опора 50 включает в себя практически воротообразную опорную основную часть 51 и пару трековых устройств 52 (трековых устройств опорной основной части), которые поддерживают опорную основную часть 51. Опорная основная часть 51 предохраняет испытываемый образец W от опрокидывания, приходя в соприкосновение с испытываемым образцом W, когда испытываемый образец W теряет равновесие и наклоняется.
[0047] В испытании несталкивающегося типа позиция, в которой испытываемый образец W опрокидывается (т.е. позиция в направлении X-оси, в которой большая динамическая нагрузка действует на испытываемый образец W), изменяется в зависимости от условия испытания. Следовательно, первая опора 50 настоящего варианта осуществления конфигурируется так, что позиция опорной основной части 51 в направлении X-оси может изменяться.
[0048] Как показано на фиг. 3, опорная основная часть 51 имеет балку 513 (соединительный фрагмент), протягивающуюся в поперечном направлении, пару ног 512, протягивающихся вниз от левого и правого крайних фрагментов балки 513, пару подножий 511, протягивающихся вперед от нижних крайних фрагментов соответствующих ног 512, и пару ребер 514, соединяющих ноги 512 и подножия 511 друг с другом. Следует отметить, что балка 513 и пара ног 512 настоящего варианта осуществления формируются как единое целое посредством вырезания из единой плоской пластины. Как показано в увеличенном виде, окруженном двумя штрих-пунктирными линиями на фиг. 3, множество сквозных отверстий 511a, проходящих вертикально, формируются в подножиях 511. Например, множество сквозных отверстий 511a формируются в ряд с равными интервалами в направлении X-оси.
[0049] Прямоугольный вырезанный фрагмент 51n, окруженный балкой 513 и парой ног 512, формируется в нижнем фрагменте опорной основной части 51. Ширина (размер по Y-оси) и высота (размер по Z-оси) вырезанного фрагмента 51n больше ширины и высоты тележки 20, так что тележка 20 может проходить через вырезанный фрагмент 51n. Т.е., в состоянии, в котором испытываемый образец W не помещен на тележку 20, возможно изменять продольное соотношение (порядок размещения в направлении X-оси) между тележкой 20 и опорной основной частью 51.
[0050] Как показано на фиг. 1, пара трековых устройств 52 устанавливаются на левом и правом крайних фрагментах основания 2. Как показано в увеличенном виде на фиг. 3, трековое устройство 52 включает в себя направляющий рельс 521, гайки 522 T-образной канавки и болты 523. Направляющий рельс 521 является вытянутым элементом (так называемым рельсом с T-образной канавкой), в котором формируется T-образная канавка, протягивающаяся в направлении X-оси. Множество гаек 522 T-образной канавки вставляются в T-образную канавку направляющего рельса 521.
[0051] Болты 523, прошедшие через сквозные отверстия 511a опорной основной части 51, вставляются в гайки 522 T-образной канавки, в результате чего, опорная основная часть 51 разъемным образом прикрепляется к трековому устройству 52. Т.е., трековые устройства 52 имеют функцию крепежного средства для прикрепления опорной основной части 51 к основанию 2.
[0052] Когда болты 523 ослабляются, крепление опорной основной части 51 к трековым устройствам 52 разъединяется, и опорная основная часть 51 может перемещаться в направлении X-оси. В это время, поскольку болты 523 не удаляются из гаек 522 T-образной канавки, ступни 511 опорной основной части 51 остаются присоединенными к гайкам 522 T-образной канавки через болты 523. Поскольку гайки 522 T-образной канавки вставлены в T-образную канавку, гайки 522 T-образной канавки (и опорная основная часть 51, присоединенная к гайкам 522 T-образной канавки) могут перемещаться только в направлении X-оси, которое является направлением протяжения T-образной канавки. Другими словами, когда крепление опорной основной части 51 к трековым устройствам 52 ослабляется, трековые устройства 52 функционируют в качестве направляющего средства, которое направляет перемещение опорной основной части 51 в направлении X-оси.
[0053] Следует отметить, что, в настоящем варианте осуществления, трековые устройства 52 конфигурируются как крепежное и направляющее средство, которое функционирует как крепежное средство, которое прикрепляет опорную основную часть 51 к основанию 2, и как направляющее средство, которое направляет перемещение опорной основной части 51 в направлении X-оси (направлении движения тележки 20). Однако, крепежное средство и направляющее средство могут быть предоставлены раздельно.
[0054] Вторая опора 60 включает в себя четыре держателя 62 стоек, установленные рядом с четырьмя углами на столике 21 тележки 20, четыре стойки 64 (столбчатые опоры), съемным образом, удерживаемые посредством соответствующих держателей 62 стоек, и сетку 66 (линейный элемент), поддерживаемую четырьмя стойками 64. Держатели 62 стоек являются цилиндрическими элементами, протягивающимися вертикально, и нижние фрагменты стоек 64 вставляются в полые фрагменты держателей 62 стоек.
[0055] Сетка 66 формируется в форме коробки (форме прямоугольного параллелепипеда) с открытой стороной, обращенной вниз, покрывает четыре комплекта из стойки 64 и держателя 62 стойки и прикрепляется к стойке 64, держателю 62 стойки или столику 21 посредством непоказанного крепежного элемента. Сетка 66 формируется, например, из эластомера, такого как синтетический каучук, и имеет растяжимость. Стойки 64, например, устанавливаются таким образом, чтобы быть ниже испытываемого образца W. В результате, верхний фрагмент испытываемого образца W приходит в соприкосновение с сеткой 66 и упруго и мягко удерживается сеткой 66, в результате чего, испытываемый образец W предохраняется от опрокидывания.
[0056] Посредством конфигурирования второй опоры 60 из относительно тонких элементов (или элементов, сформированных посредством соединения тонких элементов сетчатым образом), таких как стойки 64 и сетка 66, и размещения этих тонких элементов с интервалами (например, с интервалами больше толщины каждого элемента) возможно уменьшать вес второй опоры 60 и возможно уменьшать сопротивление воздуха, которое вторая опора 60 получает, когда тележка 20 движется. Это уменьшает мощность, требуемую для привода тележки 20, и делает возможным уменьшение производительности сервомотора 342, и, таким образом, становится возможным снижать расход мощности и размер устройства 1 для испытания динамической нагрузки.
[0057] Когда высота испытываемого образца W является низкой, стойки 64 могут не использоваться, и сетка 66 может быть прикреплена к держателям 62 стоек или столику 21.
[0058] Вместо сетчатого элемента, такого как сетка 66, струнный элемент, такой как резиновая струна или трос, может быть использован в качестве линейного элемента, а вместо эластомера может быть использован линейный элемент, сформированный из материала, имеющего обычную упругость (энергетическую упругость), такого как полипропилен или сталь.
[0059] Может быть применена конфигурация, в которой используется линейный элемент, который не имеет упругости, и используется крепежный элемент, который упруго прикрепляет линейный элемент к стойке 64 или тележке 20.
[0060] Фиг. 6 является блок-схемой, иллюстрирующей схематичную конфигурацию системы 1a управления устройства 1 для испытания динамической нагрузки. Система 1a управления включает в себя управляющее устройство 72, которое управляет работой всего устройства, измерительное устройство 74, которое выполняет различные измерения, и интерфейсное устройство 76, которое выполняет ввод и вывод с внешней стороной.
[0061] Сервомотор 342 каждого приводного модуля 34 соединяется с управляющим устройством 72 через сервоусилитель 342a. Кодовый датчик RE угла поворота встраивается в сервомотор 342. Фазная информация вала 342b сервомотора 342, обнаруживаемая посредством кодового датчика RE угла поворота, вводится в управляющее устройство 72 через сервоусилитель 342a.
[0062] Управляющее устройство 72 и каждый сервоусилитель 342a соединяются с возможностью связи друг с другом с помощью оптоволокна, и высокоскоростное управляется с обратной связью может выполняться между управляющим устройством 72 и каждым сервоусилителем 342a. Соответственно, возможно синхронно управлять множеством сервомоторов 342 с более высокой точностью (в частности, с высоким разрешением и высокой точностью по оси времени).
[0063] Интерфейсное устройство 76 включает в себя, например, одно или более из пользовательского интерфейса для выполнения ввода от и вывода для пользователя, сетевых интерфейсов для соединения с различными сетями, такими как LAN (локальная вычислительная сеть), и различных интерфейсов связи для соединения с внешними устройствами, такими как USB (универсальная последовательная шина) и GPIB (интерфейсная шина общего назначения). Пользовательский интерфейс включает в себя одно или более различных устройств ввода/вывода, таких как, например, различные операционные переключатели, индикаторы, различные устройства отображения, такие как LCD (жидкокристаллический дисплей), различные указательные устройства, такие как мышь и сенсорная панель, сенсорный экран, видеокамера, принтер, сканер, зуммер, динамик, микрофон и устройство считывания/записи карт памяти.
[0064] Измерительное устройство 74 включает в себя датчик 742 ускорения и кодовый датчик 744 линейного перемещения, присоединенный тележке 20. Измерительное устройство 74 формирует данные измерений посредством усиления и цифрового преобразования сигналов от датчика 742 ускорения и кодового датчика 744 линейного перемещения и передает данные измерений управляющему устройству 72. Датчик 742 ускорения, который должен быть присоединен к испытываемому образцу W, может быть дополнительно добавлен в измерительное устройство 74, чтобы измерять динамическую нагрузку, действующую на испытываемый образец W во время испытания.
[0065] Управляющее устройство 72 синхронно управляет приводом сервомоторов 342 приводных модулей 34 на основе условий управления, таких как сигналы динамической нагрузки (например, сигналы ускорения), вводимых через интерфейсное устройство 76, и данных измерений, вводимых из измерительного устройства 74. В настоящем варианте осуществления два сервомотора 342 приводятся в действие в одинаковой фазе (точнее, сервомоторы 342 приводных модулей 34FL и 34BL на левой стороне и сервомоторы 342 приводных модулей 34FR и 34BR на правой стороне приводятся в противоположных фазах (в противоположном направлении вращения)).
[0066] Как описано выше, устройство 1 для испытания динамической нагрузки согласно настоящему варианту осуществления может быть использовано для выполнения двух типов испытаний, а именно, испытания сталкивающегося типа и испытания несталкивающегося типа. Далее в данном документе будут описаны содержание и процедура для каждого испытания.
[0067] Испытание сталкивающегося типа
Испытание сталкивающегося типа выполняется в состоянии, в котором соединение между тележкой 20 и кареткой 32 устройства 30 привода тележки разъединено. В испытании сталкивающегося типа сила, которая вынуждает испытываемый образец W опрокидываться вперед, действует на испытываемый образец W, когда тележка 20 сталкивается с устройством 40 создания динамической нагрузки. Следовательно, в случае, когда используется первая опора 50, например, как показано на фиг. 1, опорная основная часть 51 (более конкретно, балка 513) первой опоры 50 устанавливается поблизости от заднего крайнего фрагмента устройства 40 создания динамической нагрузки (т.е., подушек 43). Позиция опорной основной части 51 первой опоры 50 надлежащим образом регулируется в соответствии с размером, формой, распределением веса и т.п. испытываемого образца W.
[0068] В испытании сталкивающегося типа, например, каретка 32 перемещается в начальную позицию S, заданную поблизости от заднего конца диапазона перемещения (диапазона подвижности тележки 20 в направлении X-оси) посредством привода приводного модуля 34. Затем, тележка 20 перемещается, например, вручную, в позицию, где тележка 20 касается каретки 32, и испытываемый образец W помещается на столик 21 тележки 20. Когда используется вторая опора 60, испытываемый образец W удерживается на столике 21 посредством второй опоры 60.
[0069] Когда погрузка испытываемого образца W на тележку 20 завершена, и команда начать испытание выдается посредством пользовательской операции, например, на сенсорном экране (интерфейсном устройстве 76) или т.п., непрерывное измерение динамической нагрузки посредством датчика 742 ускорения, установленного на тележку 20, начинается. Результаты обнаружения посредством датчика 742 ускорения накапливаются и сохраняются в запоминающем устройстве 721, соединенном с управляющим устройством 72, изображаются в виде графика и отображаются на устройстве отображения (интерфейсном устройстве 76) как сигнал динамической нагрузки (например, сигнал ускорения).
[0070] Затем, каретка 32 постепенно ускоряется вперед посредством привода приводного модуля 34. В это время тележка 20 толкается кареткой 32, чтобы двигаться с той же скоростью, что и каретка 32. Когда каретка 32 достигает предварительно заданной скорости столкновения, каретка 32 замедляется. Поскольку каретка 32 замедляется тележка 20 удаляется от каретки 32, движется по инерции со скоростью столкновения и, наконец, сталкивается с устройством 40 создания динамической нагрузки.
[0071] В испытании сталкивающегося типа динамическая нагрузка, создаваемая посредством столкновения между тележкой 20 и устройством 40 создания динамической нагрузки, действует на испытываемый образец W, помещенный на тележку 20. Посредством столкновения сила для наклона испытываемого образца W вперед действует на испытываемый образец W. Следовательно, испытываемый образец W наклоняется вперед, но испытываемый образец W предохраняется от опрокидывания, поскольку испытываемый образец W касается опорной основной части 51 первой опоры 50, размещенной поблизости от переднего конца тележки 20.
[0072] Когда предварительно определенное время проходит после столкновения, измерение посредством датчика 742 ускорения прекращается, испытываемый образец W забирается с тележки 20, тем самым, одно испытание сталкивающегося типа заканчивается.
[0073] Испытание несталкивающегося типа
Испытание несталкивающегося типа выполняется в состоянии, в котором каретка 32 и тележка 20 соединены как единое целое соединительным средством 321.
[0074] В испытании несталкивающегося типа позиция, где испытываемый образец W, как ожидается, должен опрокидываться (расчетная позиция опрокидывания), изменяется в зависимости от условий испытания (сигнала удара или т.п.). При использовании первой опоры 50 опорная основная часть 51 первой опоры 50 устанавливается поблизости от расчетной позиции опрокидывания.
[0075] Затем, тележка 20, соединенная с кареткой 32, перемещается в начальную позицию посредством привода приводного модуля 34. Начальная позиция испытания несталкивающегося типа может быть задана в позицию, отличную от начальной позиции S испытания сталкивающегося типа (например, поблизости от центра диапазона перемещения тележки 20). В начальной позиции испытываемый образец W помещается на столик 21 тележки 20. Когда используется вторая опора 60, испытываемый образец W удерживается на столике 21 посредством второй опоры 60.
[0076] Когда погрузка испытываемого образца W на тележку 20 завершена, и команда начать испытание выдается посредством операции пользователя на интерфейсном устройстве 76, непрерывное измерение динамической нагрузки посредством датчика 742 ускорения, установленном на тележке 20, начинается.
[0077] Затем, привод сервомотора 342 каждого приводного модуля 34 управляется на основе данных сигнала для предварительно заданного сигнала динамической нагрузки (например, сигнала ускорения). Динамическая нагрузка, создаваемая каждым приводным модулем 34, передается каретки 32 и тележке 20 посредством ременного механизма 35 и прикладывается к испытываемому образцу W, помещенному на тележку 20.
[0078] Поскольку, например, сила для наклона испытываемого образца W вперед действует на испытываемый образец W вследствие динамической нагрузки, прикладываемой к испытываемому образцу W, испытываемый образец W наклоняется вперед. Однако, поскольку испытываемый образец W приходит в соприкосновение с опорной основной частью 51 первой опоры 50, размещенной поблизости от переднего конца тележки 20, испытываемый образец W предохраняется от опрокидывания.
[0079] Когда предварительно определенное время проходит после приложения динамической нагрузки к испытываемому образцу W, измерение посредством датчика 742 ускорения прекращается, испытываемый образец W забирается с тележки 20, тем самым, одно испытание несталкивающегося типа заканчивается.
[0080] (Второй вариант осуществления)
Далее будет описан второй вариант осуществления настоящего изобретения. Устройство 2000 для испытания динамической нагрузки согласно второму варианту осуществления является устройством, в котором первая опора сделана автоматически подвижной. Далее в данном документе, главным образом, аспекты второго варианта осуществления, которые отличаются от первого варианта осуществления, будут описаны, и дублирующее описание конфигураций, общих с первым вариантом осуществления, будет пропущено.
[0081] Фиг. 7 является видом в плане устройства 2000 для испытания динамической нагрузки согласно второму варианту осуществления настоящего изобретения. Первая опора 2500 устройства 2000 для испытания динамической нагрузки включает в себя опорную основную часть 2510, трековое устройство 2520, которое поддерживает опорную основную часть 2510 таким образом, чтобы быть подвижной в направлении X-оси, и средство привода опорной основной части, которое приводит в движение опорную основную часть 2510. Средство привода опорной основной части включает в себя четыре приводных модуля 2540 (2540FL, 2540FR, 2540BL, 2540BR), которые создают мощность для привода опорной основной части 2510, и два комплекта ременных механизмов 2550 (2550R, 2550L) на левой и правой стороне, которые передают мощность, создаваемую приводными модулями 2540, опорной основной части 2510. Опорная основная часть 2510 приводится в движение в направлении X-оси посредством мощности, создаваемой приводными модулями 2540.
[0082] Четыре приводных модуля 2540 размещаются рядом с четырьмя углами основания 2, соответственно. Ременной механизм 2550L на левой стороне приводится в действие парой приводных модулей 2540FL и 2540BL на левой стороне, а ременной механизм 2550R на правой стороне приводится в действие парой приводных модулей 2540FR и 2540BR на правой стороне. Конфигурация приводного модуля 2540 является такой же, что и конфигурация приводного модуля 34 первого варианта осуществления, и, таким образом, ее описание будет пропущено.
[0083] Трековое устройство 2520 включает в себя пару дорожных полотен 2521, установленных на основании 2 и протягивающихся в направлении X-оси, и пару линейных направляющих 2522, предусмотренных на дорожных полотнах 2521, соответственно. Каждая линейная направляющая 2522 включает в себя рельс 2522a, уложенный на верхней поверхности дорожного полотна 2521, и множество (например, два) бегунков 2522b, приспособленных для движения по рельсу 2522a. Бегунки 2522b присоединяются к нижней поверхности ножных фрагментов 2511 опорной основной части 2510. Линейная направляющая 2522 направляет перемещение опорной основной части 2510 в направлении X-оси.
[0084] Каждый ременной механизм 2550 включает в себя пару ведущих шкивов 2551, зубчатый ремень 2552, намотанный вокруг пары ведущих шкивов 2551, и зажим 2553 для ремня (промежуточное инструментальное средство крепления намотки), которая прикрепляет зубчатый ремень 2552 к опорной основной части 2510. Ведущие шкивы 2551 присоединяются к валам 2544 соответствующих приводных модулей 2540. Опорная основная часть 2510 снабжается горизонтально размещенными частями 2515 для присоединения зажима для ремня плоской пластинчатой формы, выступающими наружу влево и вправо из соответствующих ног 2512. Зубчатые ремни 2552 присоединяются к соответствующим частям 2515 для присоединения зажима для ремня посредством зажимов 2553 для ремней. Опорная основная часть 2510 приводится в движение вперед и назад (в направлении X-оси) посредством мощности, передаваемой приводным модулем 2540.
[0085] Как показано на фиг. 6, сервомотор 2542 каждого приводного модуля 2540 соединяется с управляющим устройством 72 через сервоусилитель 2542a. Кодовый датчик RE угла поворота встраивается в сервомотор 2542. Фазная информация вала сервомотора 2542, обнаруживаемая посредством кодового датчика RE угла поворота, вводится в управляющее устройство 72 через сервоусилитель 2542a.
[0086] Далее в данном документе будут описаны два примера, относящихся к управлению приводом опорной основной части 2510 первой опоры 2500 устройства 2000 для испытания динамической нагрузки согласно второму варианту осуществления настоящего изобретения.
[0087] (Пример 1)
В примере 1 перемещение и фиксация опорной основной части 51 первой опоры 50, которые выполняются вручную в первом варианте осуществления, автоматизируются. В частности, перед началом ударного испытания (например, перед помещением испытываемого образца W на тележку 20), управляющее устройство 72 синхронно управляет четырьмя приводными модулями 2540 (сервомоторами 2542) средства привода опорной основной части, чтобы перемещать опорную основную часть 2510 в предварительно определенную позицию (позицию установки опорной основной части), заданную в соответствии с условием испытания.
[0088] В испытании сталкивающегося типа позиция установки поддерживающей основной части задается, например, в позиции рядом с передней стороной тележки 20, размещенной на переднем конце диапазона, в котором тележка 20 движется во время испытания (т.е., поблизости от заднего крайнего фрагмента устройства 40 создания динамической нагрузки). В позиции без столкновения позиция установки опорной основной части задается, например, в позиции рядом с передней стороной тележки 20, размещенной на переднем конце диапазона, в котором тележка 20 движется во время испытания, или в позиции рядом с задней стороной тележки 20, размещенной на заднем конце диапазона, в котором тележка 20 движется во время испытания. Например, когда знак максимального ускорения сигнала динамической нагрузки (или интегральное значение ускорения) является положительным (т.е., когда направленная вперед динамическая нагрузка должна быть приложена), позиция установки опорной основной части задается в передней части диапазона движения тележки 20, а когда знак является отрицательным (т.е., когда направленная назад динамическая нагрузка должна быть приложена), позиция установки опорной основной части задается в задней части диапазона движения тележки 20.
[0089] В примере 1, во время испытания, опорная основная часть 2510 не приводится в движение, а удерживается в позиции установки опоры. Другими словами, средство привода опорной основной части функционирует как крепежное средство, которое разъемным образом прикрепляет опорную основную часть 2510 к основанию 2 во время испытания.
[0090] (Пример 2)
В примере 2, во время испытания, опорная основная часть 2510 не удерживается неподвижно, и тележка 20 и опорная основная часть 2510 приводятся в движение, в то же время поддерживая расстояние между тележкой 20 и опорной основной частью 2510 практически постоянным. В частности, управляющее устройство 72 синхронно управляет четырьмя приводными модулями 34 (в частности, сервомоторами 342) средства привода каретки и четырьмя приводными модулями 2540 (в частности, сервомоторами 2542) средства привода опорной основной части на основе сигнала динамической нагрузки.
[0091] Привод четырех приводных модулей 2540 средства привода опорной основной части может управляться на основе сигнала динамической нагрузки, подвергаемого сглаживающей обработке (например, простое скользящее среднее). Посредством управления приводом на основе сигнала динамической нагрузки, подвергаемого сглаживающей обработке, ускорение, действующее на опорную основную часть 2510, смягчается, и расход мощности сервомотора 2542 уменьшается.
[0092] Согласно вариантам осуществления настоящего изобретения, описанным выше, поскольку первые опоры 50 и 2500 отделяются от тележки 20, увеличение в весе тележки 20 и сопротивлении воздуха во время движения вследствие введения средства предотвращения опрокидывания, снижается, и увеличение в мощности, требуемой для привода тележки 20, снижается. Следовательно, возможно приводить в движение тележку 20 с помощью мотора меньшей производительности. Кроме того, поскольку ухудшение характеристик движения (например, точности и стабильности скорости движения) и изменение в характеристиках динамической нагрузки (например, сигнале динамической нагрузки, который должен быть приложен к испытываемому образцу W) тележки 20 вследствие введения средства предотвращения опрокидывания, снижается, ухудшение в точности испытания может быть пресечено. Кроме того, в испытании несталкивающегося типа, более значительная динамическая нагрузка (ускорение) может быть приложена к испытываемому образцу W посредством сдерживания увеличения в весе тележки (столика динамической нагрузки) и сопротивления воздуха.
[0093] Вышеприведенное является описаниями иллюстративных вариантов осуществления настоящего изобретения. Варианты осуществления настоящего изобретения не ограничиваются вышеописанными вариантами осуществления, и различные модификации возможны. Например, подходящие сочетания конфигураций вариантов осуществления и т.п., явно иллюстрированных в этой спецификации, и/или конфигураций, которые очевидны обычному специалисту в области техники из описания этой спецификации, также включены в варианты осуществления этой заявки.
[0094] В каждом из вариантов осуществления, описанных выше, тележка 20 и каретка 32 отделяются друг от друга таким образом, что испытание сталкивающегося типа и испытание несталкивающегося типа могут быть выполнены. Однако, тележка 20 и каретка 32 могут быть объединены, чтобы формировать устройство, специально предназначенное для испытания несталкивающегося типа.
[0095] В вышеописанных вариантах осуществления средство предотвращения опрокидывания включает в себя первую опору 50 (первую опору 2500) и вторую опору 60. Однако, средство предотвращения опрокидывания может включать в себя лишь одну из первой опоры и второй опоры.
[0096] В каждом из вышеописанных вариантов осуществления зубчатый ремень 352 намотан вокруг пары ведущих шкивов 351. Однако, один из шкивов, вокруг которого зубчатый ремень 352 намотан, может быть ведомым шкивом. В этом случае, один из приводных модулей 34FL (34FR) и 34BL (34BR) не является обязательным. Такая конфигурация может также быть применена к ременному механизму 2550 средства привода опорной основной части.
[0097] В каждом из вышеописанных вариантов осуществления каретка 32 приводится в движение двумя зубчатыми ремнями 352. Однако, каретка 32 может приводиться в движение одним или тремя или более зубчатыми ремнями 352. Такая конфигурация может также быть применена к средству привода опорной основной части.
[0098] Фиг. 8 является видом в плане, схематично показывающим примерную конфигурацию, в которой каретка 32 приводится в движение четырьмя зубчатыми ремнями 352. Как показано на фиг. 8, длины (число зубцов) соответствующих зубчатых ремней 352 могут быть сделаны одинаковыми. Делая длины зубчатых ремней 352 одинаковыми, передаточные характеристики множества зубчатых ремней 352 становятся единообразными, и, таким образом, каретка 32 может приводиться в движение более устойчиво. Такая конфигурация может также быть применена к ременному механизму 2550 средства привода опорной основной части. Кроме того, посредством размещения соседних приводных модулей 34 в продольном направлении (т.е., посредством сдвига позиций соседних приводных модулей 34 относительно друг друга в продольном направлении), возможно делать устройство для испытания динамической нагрузки компактным.
[0099] Начальные диаметры (число зубцов) соответствующих ведущих шкивов 351 могут быть сделаны одинаковыми. Передаточные отношения ременных механизмов 343, встроенных в соответствующие приводные модули 34, могут также быть сделаны одинаковыми. С такой конфигурацией, поскольку отношения величин привода соответствующих сервомоторов 342 (углы поворота соответствующих валов 342b) к величинам перемещения соответствующих зубчатых ремней 352 становятся одинаковыми, сервомоторы 342 могут приводиться в действие с одинаковыми величинами привода. Такие конфигурации могут также быть применены к средству привода опорной основной части.
[0100] Фиг. 9 является схемой, показывающей схематичную конфигурацию модифицированного примера приводного модуля 34. Как показано на фиг. 9, приводной модуль 34 может включать в себя множество (например, два) сервомоторов 342. В модифицированном примере, показанном на фиг. 9, валы 342b пары сервомоторов 342 соединяются с обоими концами вала 344 посредством соединений 346, соответственно. Таким образом, один ведущий шкив 351 может приводиться в движение парой сервомоторов 342. Конфигурация, в которой множество ведущих шкивов 351 (ременной механизм 35) присоединяются к одному валу 344, может также быть применена. С этой конфигурацией возможно изменять отношение сервомоторов 342 к ведущим шкивам 351, присоединенным к валу 344, и, таким образом, возможно эффективно использовать рабочие характеристики сервомотора 342 и зубчатого ремня 352.
[0101] В вышеописанном варианте осуществления используется линейный элемент, имеющий упругость резины. Однако, например, линейный элемент, сформированный из очень упругого материала, такого как полиамидная смола или сталь, может быть использован.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2021 |
|
RU2836068C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ КОЛЕС | 2021 |
|
RU2824533C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2020 |
|
RU2819633C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2020 |
|
RU2819075C2 |
| МИКРОТВЕРДОМЕР | 2001 |
|
RU2231041C2 |
| Транспортное устройство для слитков для прокатки, применение такого транспортного устройства и способ транспортировки слитков для прокатки | 2014 |
|
RU2640508C2 |
| Катковый стенд для оценки динамических параметров тележки вагона | 2017 |
|
RU2668485C1 |
| СОРТИРОВОЧНАЯ МАШИНА | 2023 |
|
RU2829298C1 |
| ИСПЫТАТЕЛЬНОЕ УСТРОЙСТВО, СПОСОБ НАСТРОЙКИ ИСПЫТАТЕЛЬНОГО ПРОЦЕССА И СПОСОБ ИСПЫТАНИЯ РУЛЕВОГО МЕХАНИЗМА | 2019 |
|
RU2771014C1 |
| Способ видеосъемки и система для его реализации | 2019 |
|
RU2705102C1 |
Группа изобретений относится устройствам для испытания. Варианты устройства для испытания динамической нагрузки содержит тележку, выполненную с возможностью движения с испытываемым образцом, помещенным на нее, и средство предотвращения опрокидывания, выполненное с возможностью предохранения испытываемого образца от опрокидывания. Средство предотвращения опрокидывания включает в себя первое средство, независимое от тележки. Первое средство предусмотрено таким образом, чтобы быть подвижным в направлении движения тележки. Средство предотвращения опрокидывания включает в себя второе средство, установленное на тележке. Второе средство содержит множество столбчатых опор, установленных на тележке, и линейный элемент, растянутый поверх множества столбчатых опор. Достигается снижение увеличения мощности, требуемой для привода столика для динамической нагрузки. 2 н. и 11 з.п. ф-лы, 9 ил.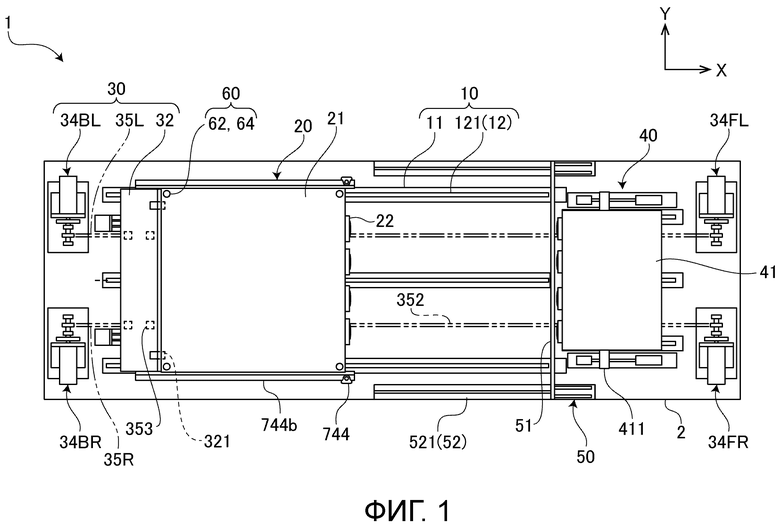
1. Устройство для испытания динамической нагрузки, содержащее:
тележку, выполненную с возможностью движения с испытываемым образцом, помещенным на нее; и
средство предотвращения опрокидывания, выполненное с возможностью предохранения испытываемого образца от опрокидывания,
при этом средство предотвращения опрокидывания включает в себя первое средство, независимое от тележки, и
при этом первое средство предусмотрено таким образом, чтобы быть подвижным в направлении движения тележки.
2. Устройство для испытания динамической нагрузки по п. 1,
в котором первое средство содержит:
опорную основную часть, выполненную с возможностью поддержки испытываемого образца при его наклоне для предотвращения опрокидывания испытываемого образца; и
направляющее средство, выполненное с возможностью направления движения опорной основной части в направлении движения.
3. Устройство для испытания динамической нагрузки по п. 2,
содержащее основание, на которое устанавливается первое средство,
при этом первое средство включает в себя крепежное средство, выполненное с возможностью прикрепления опорной основной части к основанию разъемным образом.
4. Устройство для испытания динамической нагрузки по п. 3,
в котором первое средство включает в себя крепежное и направляющее средство, служащее как в качестве направляющего средства, так и в качестве крепежного средства, при этом крепежное и направляющее средство содержит:
T-образную канавку, прикрепленную к основанию и проходящую в направлении движения;
гайку T-образной канавки, вставленную в T-образную канавку; и
болт, вставленный в сквозное отверстие, сформированное в опорной основной части, и вставленный в гайку T-образной канавки, тем самым, прикрепляя опорную основную часть к T-образной канавке.
5. Устройство для испытания динамической нагрузки по любому из пп. 2-4,
в котором первое средство включает в себя средство привода опорной основной части, выполненное с возможностью приведения в движение опорной основной части в направлении движения.
6. Устройство для испытания динамической нагрузки по п. 5,
в котором средство привода опорной основной части содержит:
приводной модуль, выполненный с возможностью создания мощности для привода опорной основной части; и
ременной механизм, выполненный с возможностью передачи мощности, созданной приводным модулем, на опорную основную часть.
7. Устройство для испытания динамической нагрузки по п. 5, содержащее:
устройство привода тележки, выполненное с возможностью приведения в движение тележки; и
управляющее устройство, выполненное с возможностью управления средством привода опорной основной части и устройством привода тележки,
при этом управляющее устройство перемещает опорную основную часть в предварительно определенную позицию, заданную в соответствии с условием испытания.
8. Устройство для испытания динамической нагрузки по п. 7,
содержащее устройство создания динамической нагрузки, выполненное с возможностью создания динамической нагрузки, прикладываемой к испытываемому образцу посредством столкновения с тележкой,
при этом устройство для испытания динамической нагрузки выполнено с возможностью осуществления:
испытания сталкивающегося типа, в котором динамическая нагрузка прикладывается к испытываемому образцу посредством побуждения столкновения тележки, на которой размещен испытываемый образец, с устройством создания динамической нагрузки; и
испытания несталкивающегося типа, в котором динамическая нагрузка прикладывается к испытываемому образцу посредством передачи на тележку динамической нагрузки, созданной посредством приведения в действие устройства привода тележки,
при этом управляющее устройство:
управляет устройством привода тележки, для побуждения столкновения тележки с устройством создания динамической нагрузки с предварительно определенной скоростью в испытании сталкивающегося типа; и
управляет устройством привода тележки таким образом, что тележка приводится в движение на основании предварительно заданного сигнала динамической нагрузки в испытании несталкивающегося типа.
9. Устройство для испытания динамической нагрузки по п. 8,
в котором устройство привода тележки включает в себя:
каретку, разъемным образом присоединенную к тележке; и
трековое устройство тележки, выполненное с возможностью движимой поддержки тележки и каретки,
при этом, в испытании сталкивающегося типа, каретка присоединена к тележке, и
при этом, в испытании несталкивающегося типа, соединение между кареткой и тележкой разъединено.
10. Устройство для испытания динамической нагрузки по п. 8,
в котором устройство создания динамической нагрузки содержит:
подвижный блок;
первый пластиковый программатор, присоединенный к поверхности подвижного блока, обращенной к тележке;
трековое устройство блока, выполненное с возможностью поддержки подвижного блока таким образом, чтобы быть подвижным в направлении движения; и
амортизатор удара, выполненный с возможностью гашения вибрации подвижного блока,
при этом трековое устройство блока включает в себя линейную направляющую,
при этом линейная направляющая содержит:
рельс; и
бегунок, присоединенный к подвижному блоку и выполненный с возможностью движения по рельсу при помощи роликовых элементов, и
при этом тележка содержит второй пластиковый программатор, присоединенный к поверхности, обращенной к подвижному блоку.
11. Устройство для испытания динамической нагрузки по п. 1,
в котором средство предотвращения опрокидывания включает в себя второе средство, установленное на тележке,
при этом второе средство содержит:
множество столбчатых опор, установленных на тележке; и
линейный элемент, растянутый поверх множества столбчатых опор.
12. Устройство для испытания динамической нагрузки, содержащее:
тележку, выполненную с возможностью движения с испытываемым образцом, размещенным на ней; и
средство предотвращения опрокидывания, выполненное с возможностью предотвращения опрокидывания испытываемого образца,
при этом средство предотвращения опрокидывания включает в себя второе средство, установленное на тележке,
при этом второе средство содержит:
множество столбчатых опор, установленных на тележке; и
линейный элемент, растянутый поверх множества столбчатых опор.
13. Устройство для испытания динамической нагрузки по п. 11,
в котором линейный элемент включает в себя один из струнного элемента, имеющего форму струны, и сетчатого элемента, имеющего форму сетки.
| WO 2009145012 A1, 03.12.2009 | |||
| JP 2005227011 A, 25.08.2005 | |||
| Стенд для динамических испытаний силового привода транспортного средства | 1988 |
|
SU1665254A1 |

